Изобретение относится к крупногабаритным космическим системам, формируемым полем инерционных сил и предназначаемым для выполнения разнообразных задач в околопланетной среде, в частности - для исследований электромагнитных и плазмодинамических процессов в ионосфере и магнитосфере Земли, связанных с работой энергетического и антенного оборудования орбитальных тросовых систем (ТС).
Известна ТС центробежного типа, содержащая гибкий (кабельно-тросовый) несущий каркас и связанную с ним гибкую поверхность пленочной структуры. При развертывании и закрутке каркаса образуется дискообразная поверхность, служащая отражателем солнечного излучения и способная выполнять ряд иных функций технологического и исследовательского характера. Каркас может использоваться в качестве крупногабаритной орбитальной антенны [1].
Известна ТС, испытанная в отечественном эксперименте "Знамя", подтвердила свою практическую осуществимость - для диаметров отражателя 25...50 м. Однако ряд существенных проблем связан с развертыванием обширного пленочного полотна так, чтобы получить поверхность достаточно высокого качества: без складок, разрывов и т.д. Кроме того, не всегда требуется сплошная - от центра к периферии - рабочая поверхность, которая имеет значительную "парусность", накладывает ограничения на движение и ориентацию космического аппарата (КА)-носителя, достаточно массивна. Особенно сильно эти недостатки проявляются при увеличении габаритов конструкции до 100...1000 м и более.
Наиболее близким аналогом изобретения является динамическая ТС, которая может быть использована для активных экспериментов в ионосфере.
Данная динамическая ТС, содержащая несущий каркас в виде по меньшей мере одного замкнутого гибкого звена, привод контурного движения несущего каркаса, развертываемую гибкую поверхность с электропроводящей структурой и средствами коммутации элементов этой структуры - описана в статье [2].
Известная ТС позволяет излучать процессы генерирования плазменных волн, зарядообмен между ТС и ионосферной плазмой и н.др.
Однако конструктивное взаимодействие несущего каркаса с гибкой поверхностью не является рациональным, ввиду чего последняя (выполненная в виде длинной ленты) не имеет устойчивого положения относительно каркаса - особенно при значительных удлинениях ленты. Электропроводящая структура поверхности и средства коммутации не разработаны в каком-либо конкретном направлении так, чтобы стало возможным содержательное излучение взаимодействия ТС с плазмой, в частности процесса токогенерирования и работы в режиме антенны.
Техническим результатом предлагаемого изобретения является создание ТС с повышенной устойчивостью рабочей формы гибкой поверхности, одновременно - самого несущего каркаса, а также обеспечение большей функциональной насыщенности конструкции ТС при сравнительной ее простоте и пониженном влиянии на движение и ориентацию КА-носителя.
Указанный технический результат достигается тем, что в известной динамической тросовой системе гибкая поверхность в развернутом состоянии выполнена плоскокольцевой конфигурации и соединена по внутреннему периметру с несущим каркасом.
В предпочтительном варианте исполнения гибкая поверхность выполнена в виде пленочного или сетчатого полотна, на котором установлены элементы указанной электропроводящей структуры.
В другом частном варианте исполнения гибкая поверхность содержит набор тросов, по меньшей мере некоторые из которых выполнены электропроводящими.
В обоих вариантах возможно, чтобы гибкая поверхность была выполнена секционорованной вдоль контура указанного несущего каркаса.
При этом по меньшей мере некоторые из секций гибкой поверхности могут быть связаны друг с другом по внешнему периметру этой поверхности.
С целью повышения функциональности ТС выполнена так, что электропроводящая структура содержит взаимно изолированные электропроводящие участки, а средства коммутации включают в себя устройства для поддерживания указанных участков под различными электрическими потенциалами и для управляемой электрической связи этих участков друг с другом через по меньшей мере одну электропотребляющую нагрузку.
При этом, несущий каркас в данном варианте может быть выполнен в виде нескольких взаимно изолированных электропроводящих гибких звеньев со связующей структурой, при этом указанные звенья электрически соединены с элементами электропроводящей структуры и взаимодействуют со средствами коммутации этих элементов.
В этом исполнении, по меньшей мере часть указанных средств коммутации размещена на указанной гибкой поверхности.
В предпочтительном варианте конструктивного исполнения привод контурного движения несущего каркаса выполнен в виде индукционного электродвигателя, статор которого взаимодействует с несущим каркасом как со своим ротором и снабжен средством ограничения поперечных перемещений ротора относительно статора.
При этом указанное средство ограничения перемещений ротора выполнено в виде электромагнитной подвески для обеспечения бесконтактного движения ротора относительно статора.
В данном варианте исполнения подвижные элементы электромагнитной подвески могут быть выполнены на гибкой поверхности вдоль ее участка, непосредственно примыкающего к несущему каркасу.
Наконец, в альтернативном варианте исполнения, электропроводящая структура может содержать кольцевой участок, непосредственно примыкающей к несущему каркасу, а привод контурного движения каркаса может быть выполнен в виде индукционного электродвигателя, статор которого взаимодействует с указанным кольцевым участком как со своим ротором и снабжен средством ограничения поперечных перемещений ротора относительно статора.
Анализ существующего и известного заявителю уровня техники показал, что предлагаемая совокупность существенных признаков изобретения является новой (по п. 1 формулы), а частные отличительные признаки, представленные в зависимых пп. формулы, будучи по отдельности известными в технике, тем не менее позволяют достичь указанного технического результата лишь благодаря их вхождению в заявленную совокупность - что свидетельствует о соответствии предлагаемого изобретения изобретательскому уровню. Промышленная применимость изобретения доказывается нижеследующим подробным описанием предпочтительных вариантов реализации изобретения.
На фиг. 1 представлен общий вид предпочтительного варианта исполнения предлагаемой ТС; на фиг. 2, 3, 4 - различные варианты исполнения гибкой поверхности (ГП) с элементами электропроводящей структуры (ЭПС) на ней; на фиг. 5 - возможное исполнение служебного модуля ТС с основными элементами привода контурного движения (ПКД) несущего каркаса и системы развертывания ТС в рабочее состояние; на фиг. 6 - транспортное положение ТС на служебном модуле; на фиг. 7, 8, 9 - последовательные фазы развертывания ТС в рабочее состояние; на фиг. 10 - вариант взаимосвязи элементов несущего каркаса с элементами ЭПС; на фиг. 11 - один из возможных вариантов принципиальной реализации средств коммутации элементов ЭПС.
Динамическая ТС развертывается с КА-носителя 1, с которым она связана посредством выносной штанги 2, выполненной в виде многозвенника с шарнирными сочленениями, снабженными приводами взаимного поворота и вращения звеньев. На конце штанг 2 установлен служебный модуль 3 для развертывания и управления работой ТС 4, включающий в себя несущий каркас 5 и ГП 6. Движение системы по орбите условно отмечено стрелкой ω , причем направление силовых линий геомагнитной индукции соответствует стрелкам B⊕ . Модуль 3 снабжен приводом вращения вокруг своей продольной сои (нормальной к плоскости развернутого контура ТС 4); этот привод может быть размещен на конце штанги 2, либо выполнен между подвижными друг относительно друга частями модуля 3.
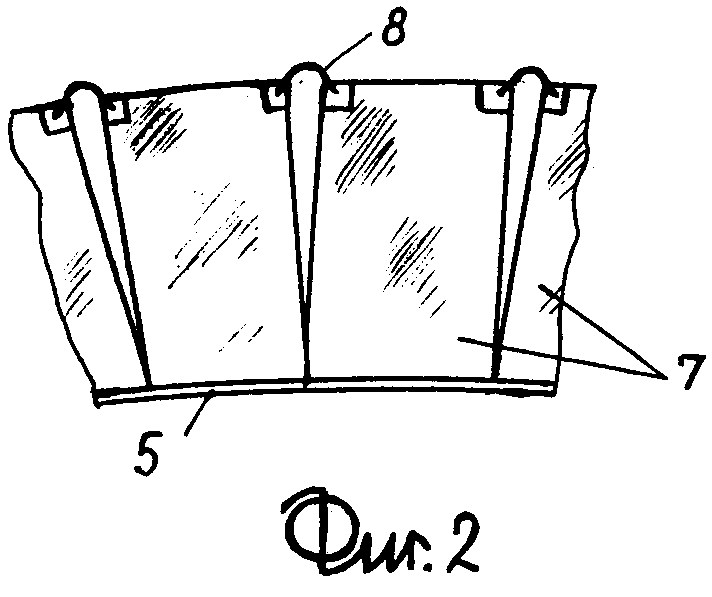
Показанная на фиг. 1 ГП 6 может быть выполнена в виде секций 7, соединенных с каркасом 5, а друг с другом - при помощи гибких связей 8 - например, отрезков провода, если секции 7 (или их части) являются электропроводящими (фиг. 2).
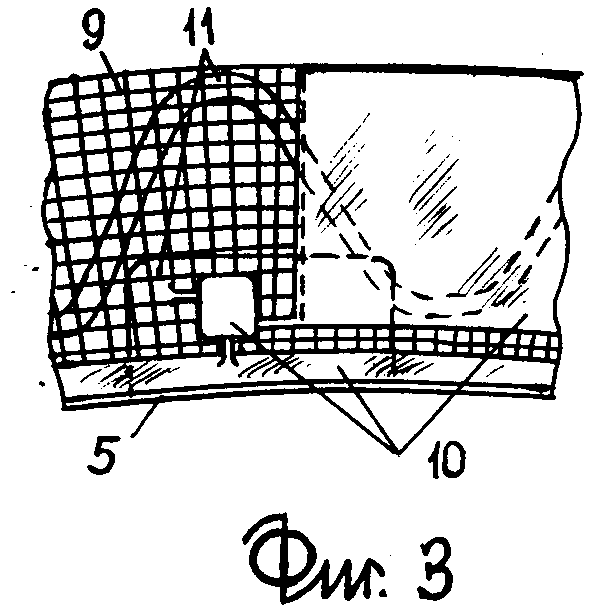
На фиг. 3 представлена сетчатая (диэлектрическая) ГП 9, на одной стороне которой установлены элементы 10, а на противоположной - элементы 11 ЭПС.
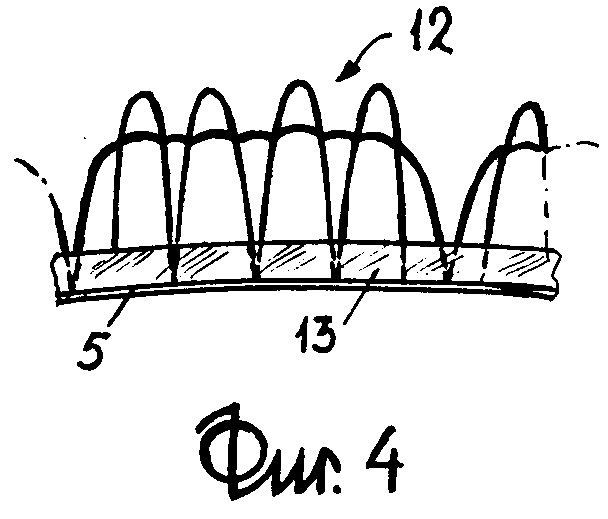
ГП может быть образована (хотя бы частично) кабельно-тросовым набором 12 (фиг. 4). Электропроводящие элементы набора 12 могут служить моделями антенн различной конфигурации и частотных диапазонов. К каркасу 5 примыкает электропроводящая полоска 13, являющаяся элементом ПКД каркаса и/или средств коммутации участков ЭПС (в том числе кабелей набора 12).
Во всех вариантах исполнения ГП следует обеспечить "свободное" закрепление ГП на каркасе 5 так, чтобы в ГП не возникали заметные напряжения вдоль контура ТС 4 (это условие вполне соблюдается при секционировании ГП, согласно фиг. 2). С этой целью упругая растяжимость каркаса 5 должна быть гораздо меньшей, чем таковая для ГП 6. При таком условии будет обеспечено надежное развертывание ГП в плоско-кольцевую конфигурацию под действием центробежных сил, возникающих вследствие контурного движения ТС 4 со скоростью V (фиг.1).
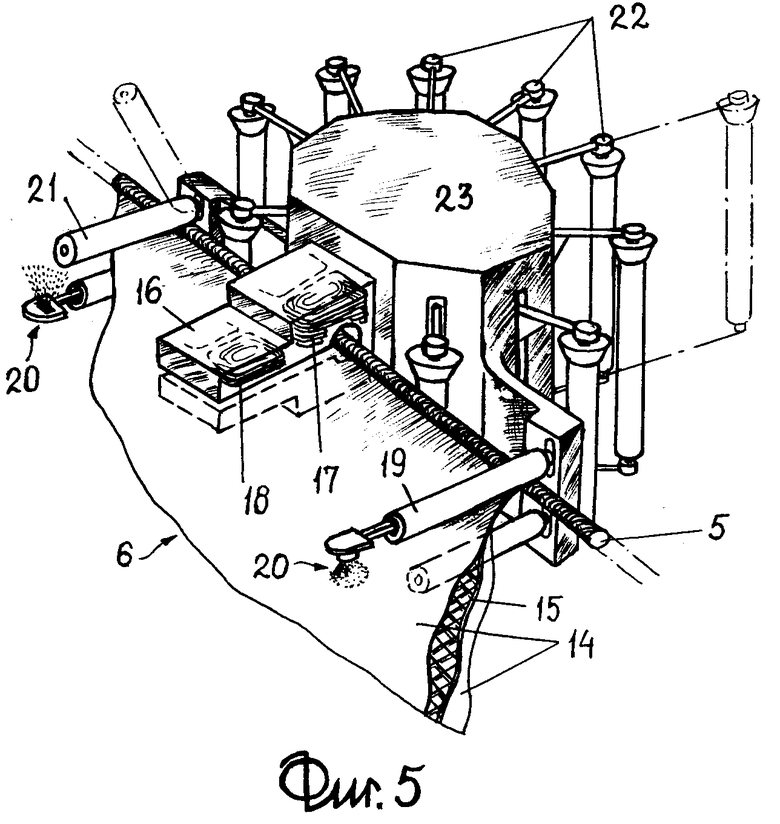
На фиг. 5 представлен вариант исполнения служебного модуля 3. ПКД каркаса 5 выполнен в виде линейного индукционного электродвигателя, подвижная часть (ротор) которого представлена электропроводной (алюминиевой) или ферромагнитной оболочкой (оплеткой) гибкого звена каркаса 5 и электропроводящими участками 14 (типа полосок 13 на фиг. 4) с обеих сторон изолирующей ГП 15. Неподвижная часть (статор) ПКД представляет собой один или несколько блоков 16 с индукторными 17 и левитационными 18 обмотками. Обмотки 17 создают бегущее вдоль контура 5 магнитное поле (возможно воздействие этого поля на участки 14). Обмотки 18 обеспечивают бесконтактное движение ротора относительно статора ПКД за счет магнитно-индукционного взаимодействия поля этих обмоток с наводимыми в участках 14 вихревыми токами (в более сложной модификации участки 14 могут выполняться в виде "плоских катушек" - элементов ЭПС, соответственно коммутируемых). Принципиально ротор ПКД может и не включать в себя гибкое звено каркаса 5, а выполняться только на участках 14 (более или менее простой структуры "плоских элементов"). Обмотки 17 и 18 подключены к управляющим средствам известного типа, расположенным в служебном модуле 3.
Линейные индукционные (асинхронные) электродвигатели хорошо известны в технике: см., например, Г.С.Тамоян. Линейные индукционные электрические машины //Изд. МЭИ, М. ,1994, 50 с.; патент США N 4857781; кл. H 02 K 41/02, 1989 г. и др. Многие из таких двигателей снабжены системами левитации.
ПКД может быть снабжен механическими ограничителями перемещений каркаса 5 с ГП 6, входящими с ними в контакт лишь в случае, когда действие левитационной системы оказывается недостаточным. Такие "предельные" ограничители выполнены здесь в виде свободных валков 19, 21, преимущественно откидных (фиг. 5). На жестких осях некоторых валков (21) могут располагаться контактные элементы 20: в виде механических (ролики, щетки и т.п.) или газожидкостных, а также холодно-плазменных электрозамыкателей.
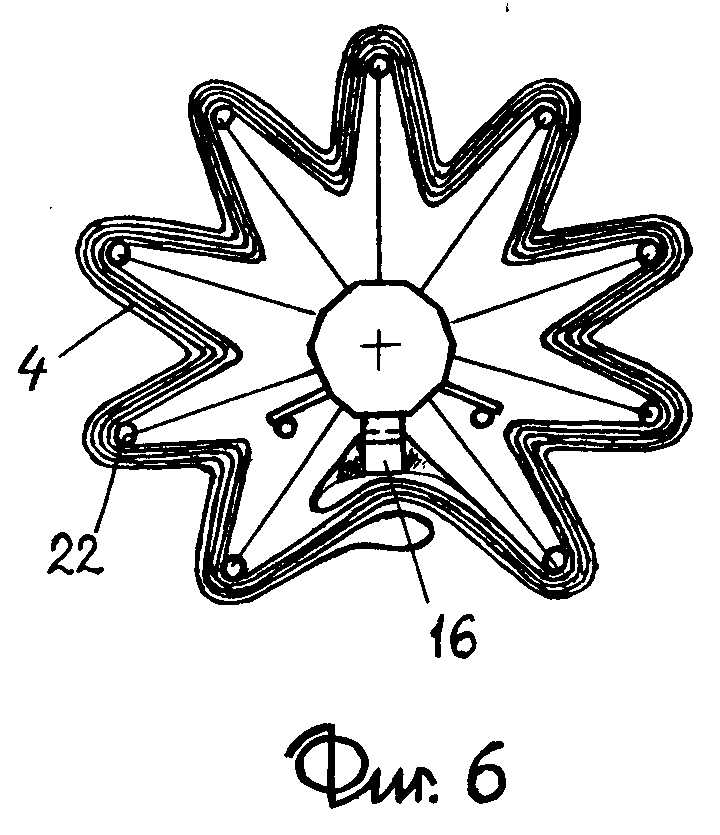
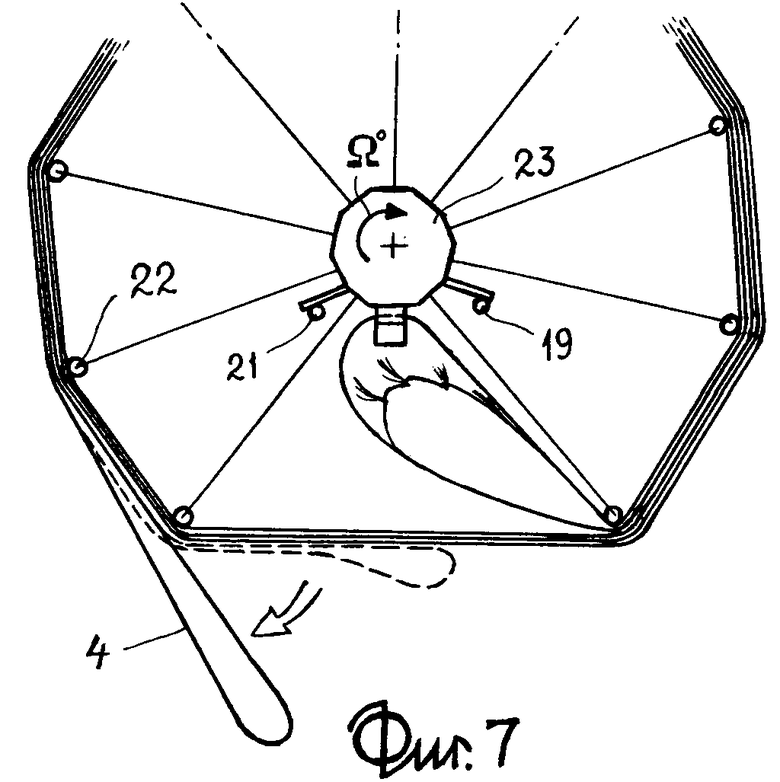
Служебный модуль 3 снабжен системой выдвижных опор 22, из которых ближайшие к ПКД (одна или более пар) служат ограничителями перемещений каркаса 5 в плоскости развернутого контура ТС 4. Опоры 22 выполнены в виде свободно вращающихся валков и образуют "барабан" для укладки ТС 4 в транспортном положении (фиг. 6) - при частичном выдвижении валков 22 из корпуса 23 модуля - и для формирования исходной призматической конфигурации ГП (отогнутой на 90o по длине каркаса 5) перед ее развертыванием в рабочее положение (фиг. 7). При этом опоры 22 выдвинуты на полную длину.
В корпусе 23 размещены средства управления работой ПКД, выдвижения опор 22, привод закрутки корпуса (или его частей) и стационарные элементы средств коммутации ЭПС.
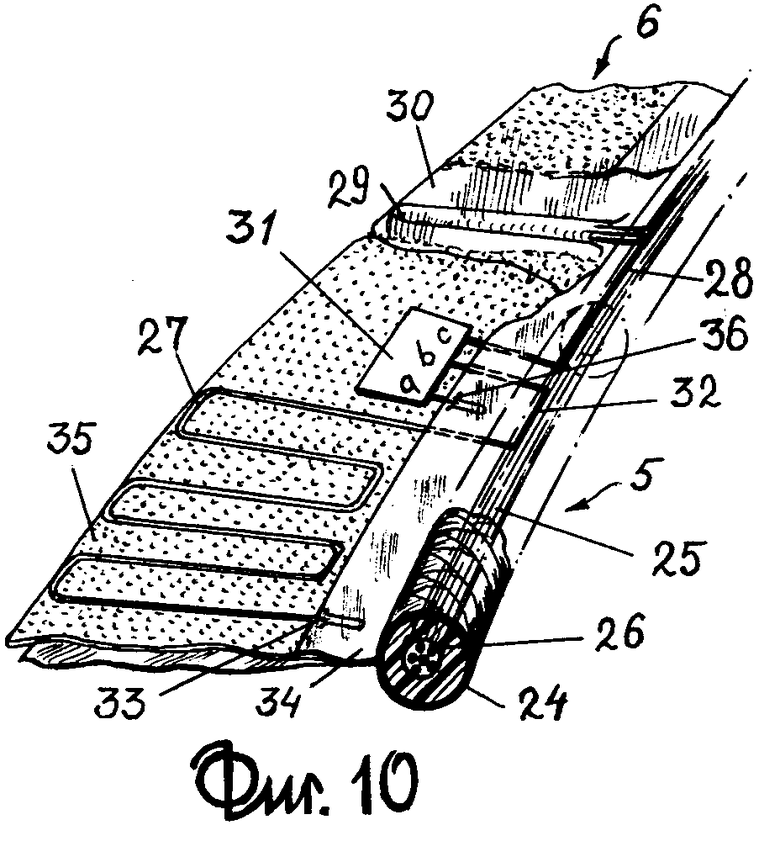
Каркас 5 может быть выполнен в виде электропроводной или ферромагнитной оболочки 24 и системы (жгута) 25 проводников, заключенных в изоляцию 26, которая может выполнять функцию связующе-силовой структуры каркаса 5. Цепь некоторой нагрузки 27 (например, антенны, расположенной вдоль части, или - полной дуги контура ТС) сформирована проводником 28, включенным в токоввод 29 коллектора 30 (электропроводящего слоя на "нижней" поверхности ГП 6) и подключенным к выводу "с" электронной схемы 31, проводником 32, подключенным к выводу "b" схемы 31 и к нагрузке 27, а также токовводом 33 этой нагрузки в коллектор 34 (электропроводящий слой на "верхней" поверхности ГП 6). Коллекторы 30 и 34 разделены изолирующим слоем 35 ГП 6. Схема 31 (например, интегральная микросхема) своим выводом "a" включена в токоввод 36 коллектора 34 (фиг. 10).
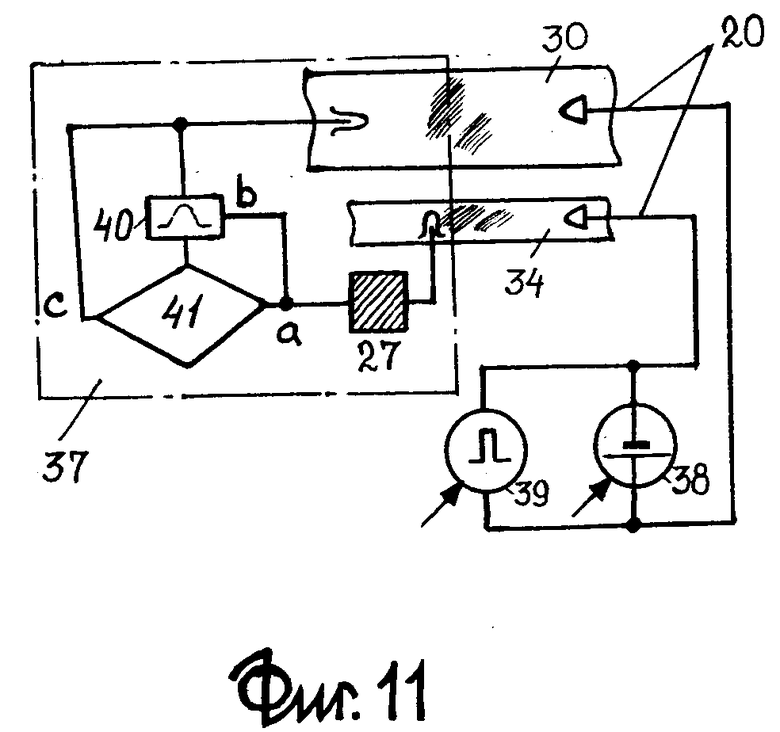
Нагрузка 27 вместе со своей вышеописанной цепью 37 (фиг. 11) относится к подвижной части ТС 4 (к ЭПС на ГП 6) и подключена к стационарным средствам коммутации (в корпусе 23 служебного модуля) посредством контактных элементов 20. Данные средства коммутации в описываемом примере включают в себя источник 38 напряжения (с очень большим внутренним сопротивлением) и генератор 39 импульсного напряжения изменяемой частицы. Источник 38 и генератор 39 - настраиваются и регулируются соответствующей системой управления (условно отмечено стрелками), размещенной в корпусе 23 служебного модуля 3 или в самом КА-носителе 1 (тогда необходимая связь осуществляется через штангу 2 - см. фиг. 1). Источник 38 обеспечивает поддержание коллектора 30 (большой площади) под отрицательным, а коллектора 34 (малой площади) под положительным - потенциалами относительно окружающей космической плазмы. В схеме могут быть предусмотрены необходимые датчики и стабилизаторы напряжения.
Электронная микросхема 31 (фиг. 10) может включать в себя частотно-полосовой фильтр 40 напряжения (фиг. 11), настроенный на заданную узкую полосу частот (для фиксированной нагрузки 27), не совпадающих, преимущественно, с рабочими частотами данной нагрузки.
Замыкание цепи нагрузки 27 осуществляется устройством 41: электронным ключом или триггером (например, на основе МОП-транзисторов), управляемым импульсами напряжения, проходящими через фильтр 40. В открытом состоянии 41 ток проходит от коллектора 34 - через нагрузку 27 - к коллектору 30 (фиг. 11). Соответствующие схемы можно найти, например, в книге: Ю.И.Горбунов, И. Я. Козырь. Полупроводниковые приборы и интегральные микросхемы //М.,"Высшая школа", 1989, с.43-55; 109-118 и др. Фильтр 40 может быть выполнен по одной из известных LC-схем. Дополнительно, возможно использование электронных усилителей, инверторов и прочных (например, более сложных логических) микроэлементов на ГП и в составе самой нагрузки 27.
Динамическая ТС согласно изобретению работает следующим образом.
КА-носитель 1 выводится на околоземную орбиту (высотой 300...1000 км), стабилизируется и выставляет служебный модуль 3, посредством выносной штанги 2, в требуемое исходное положение, преимущественно - осью закрутки модуля перпендикулярно продольной оси КА 1 (фиг.1). ТС 4 уложена на частично выдвинутых валках 22 (фиг.6) в компактной звездообразной конфигурации. При этом ГП 6 отогнута на 90o вдоль каркаса 5 и намотана слой за слоем на барабан, образованный валками 22; ширина ГП 6 типично должна составлять 1...3 м - такова же будет примерно и высота барабана. Положение ТС 4 на валках 22 таково, что при полной размотке системы она единожды охватывает все валки 22 (фиг. 7, 8). Поэтому на барабан намотана фактически "двухслойная петля" ТС, причем базовый участок контура ТС 4 с неполностью отогнутой ГП 6 зафиксирован в блоке (блоках) 16 ПКД. Транспортная укладка ТС на служебном модуле 3 может быть защищена удаляемым кожухом (не показан), и кроме того, возможно применение дополнительных фиксаторов отдельных участков каркаса и ГП: хомутиков, бандажей и т.п. (не показаны). Ограничители 19, 21 в транспортном положении и при раскрутке, преимущественно, отведены (фиг. 6, 7).
После максимального раздвижения валков 22 (фиг.7), приводящего к распрямлению, с легким подтягом, участков ТС на "гранях" барабана, последний раскручивается с достаточно большой начальной угловой скоростью Ω° (до нескольких оборотов в сек). Вследствие этого, при освобождении конца "петли" ТС 4, начинается размотка системы с барабана (фиг. 7).
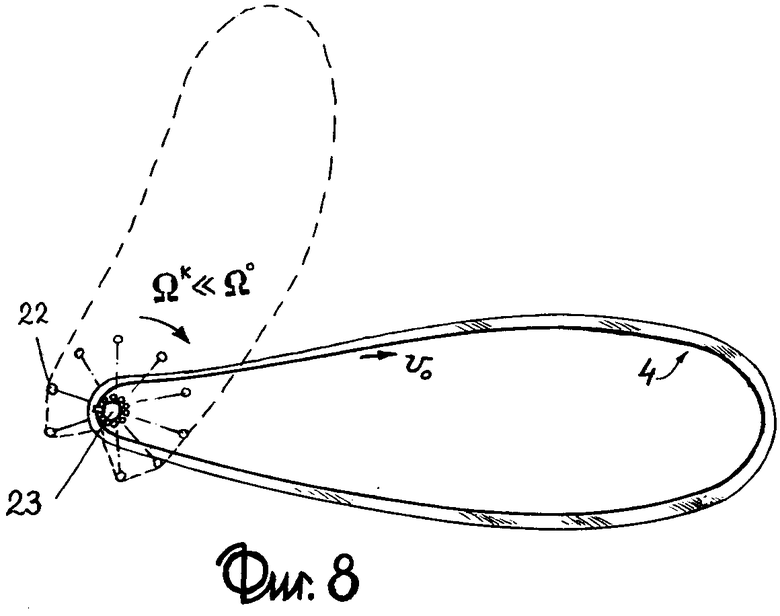
По мере размотки увеличивается длина свободной "петли" 4, а угловая скорость вращения системы, вместе с валками 22, быстро падает (что отслеживается регулируемым приводом вращения служебного модуля 3). При полной разметке остаточная угловая скорость Ωк гораздо меньше начальной (порядка 0,1.. . 0,01 об/с). В заключительной фазе размотки валки 22 плавно втягиваются в корпус 23 служебного модуля, ограничителя 19,21 - переводится в рабочее положение (как на фиг. 5), а ПКД начинает медленную протяжку каркаса 5 с ГП 6, придавая им контурную скорость V0<V. Вследствие относительной узости ГП 6 (≈1. . .3 м) - при характерных диаметрах контура ТС 4 ≈200...1000 м - эта ГП достаточно регулярно распрямится в плоскость контура под действием центробежных сил (хотя еще с некоторыми небольшими искажениями поверхности).
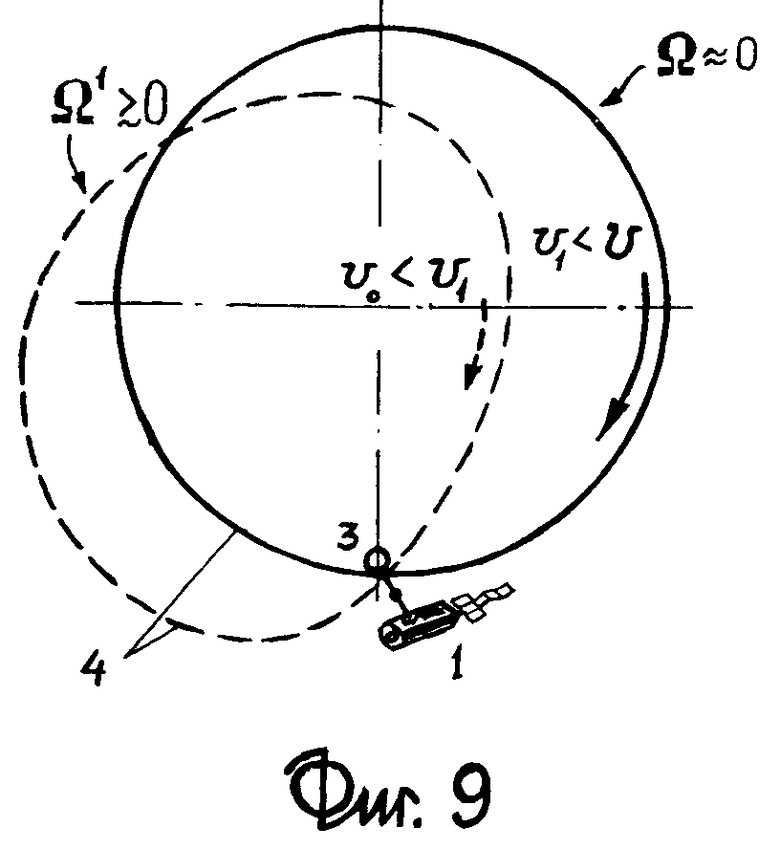
При постепенном нарастании контурной скорости: V0<V1<V - "петля" ТС 4 все более приобретает круговую форму (фиг. 9), а угловая скорость Ω "обработка" модуля 3 (наподобие вращения хулахуба) убывает, и при некотором значении контурной скорости (V) становится нулевой - ТС 4 переходит в чисто контурное движение. Из условия сохранения кинетического момента контура можно приближенно оценить связь V с остаточной угловой скоростью Ωк (фиг.8): V≈ 3rΩк , где r - радиус кругового контура в рабочем состоянии ТС (фиг. 1, 9). Например, Тс с радиусом контура в 150 м при Ωк = 0,01 с -1 в рабочем состоянии должна иметь контурную скорость около 4,5 м/с.
В развернутом состоянии ТС 4 может использоваться для разнообразных экспериментов в среде космической плазмы и геомагнитного поля. При этом кольцевая форма ГП 6 с каркасом 5 обладает повышенной устойчивостью, благодаря ощутимой изгибной "жесткости" контура, даваемой радиально вытянутой ГП, а также увеличенной диссипативности структуры ТС по отношению к колебательно-волновым деформациям контура.
Одним из важных аспектов исследований является проблема энергопитания ТС, что связано процессами зарядообмена между ТC и плазмой и возбуждением электрического тока в элементах ЭПС.
Возможность "естественного включения" ТС в плазму обусловлена большими поверхностями коллектором 30 и 34 ЭПС (фиг. 10). Как известно, на высотах 300...500 км тепловой электронный ток достигает величин  , а набегающий на КА 1 ток ионов составляет
, а набегающий на КА 1 ток ионов составляет  (см. Итоги науки и техники. Ракетостроение и космич. техника, том 12 //М., ВИНИТИ, 1991, сю65). Условие баланса токов через поверхности 30 и 34 (Ai и Ae):
(см. Итоги науки и техники. Ракетостроение и космич. техника, том 12 //М., ВИНИТИ, 1991, сю65). Условие баланса токов через поверхности 30 и 34 (Ai и Ae):
AiJi=Aeje,
соответствует небольшому положительному потенциалу поверхности Ae коллектора 34 (je=1-10 μ A/м2) и значительному отрицательному потенциалу поверхности Ai коллектора 30 (ji=0,1-1 μ A/м2).
С точки зрения электронного тока, поверхность 30 является эмиттером, а поверхность 34 - собственно коллектором. С точки зрения тока ионов, роли поверхности 30 и 34 меняются. Очевидно, поверхность 30 (Ai) должна иметь гораздо большую площадь, чем поверхность 34 (Ae). Например, при ширине ГП 6=2 м и диаметре контура 4=330 м: Ai ≅ 2000м2, и можно ожидать токов ≈0,2...2 A; причем Ae ≅ 200м2, т.е. ширина ленты 34 (фиг. 10) составит всего ≈ 20 см.
Таким образом, в предлагаемой ТС осуществимо эффективное пассивное включение в плазму (степень эффективности как раз и должна быть изучена - для различных напряжений, подаваемых с источника 38 (фиг. 11), разных ориентаций контура 4 в плазме и т.д.).
Между коллекторами 30, 34 включаются разнообразные потребители (нагрузки): антенны, датчики, управляющие кабели и др. По меньшей мере один управляющий кабель может быть протянут вдоль всего контура 4 (на ГП 6 или каркасе 5 - последний тогда должен быть неэкранирован электрически) и подключен к коллекторам 30, 34 аналогично вышеописанной нагрузке 27; при запитке такого кабеля током происходит лоренцово взаимодействие ТС 4 с геомагнитным полем B⊕ (фиг. 1) и переориентация витка 4 в некоторое заданное положение.
Управление подключением /отключением нагрузок 27 к/ от токовой цепи "30-. . .-34" может обеспечиваться с помощью электронных (микро)схем 31: при подаче импульса напряжения заданной частоты с генератора 9 (фиг. 11) через контакты 20 на коллекторы 30, 34 - этот импульс (в более сложном варианте, некоторый импульсный код), пройдя через фильтр 40, переведет элемент 41 (ключ или триггер) в открытое состояние, так что через нагрузку 27 потечет ток. Регулированием (модуляцией) напряжения (38), а также, возможно, собственного сопротивления нагрузки 27 (с помощью встроенного в 27 микропроцессора и т.п.) - можно обеспечить тот или иной режим работы нагрузи 27, например - антенны. Повторной подачей импульса с генератора 39 элемент 41 будет переведен в закрытое состояние, и нагрузка 27 отключается от токовой цепи. Различные нагрузки (или их группы) должны быть снабжены индивидуально настроенными фильтрами 40 так, чтобы их подключения и отключения происходили только при выработке генератором 39 строго определенных импульсов (кодов), заданных именно для этих нагрузок.
На ГП 6 и/или в каркасе 5 могут быть размещены разнообразные активные элементы для воздействия на окружающую ионосферную среду - в пространственных масштабах от нескольких см до сотен м. Эти элементы могут генерировать электромагнитные (а также тепловые, химические, корпускулярные и др.) воздействия в широком частотном диапазоне ( в широком спектре циклограмм). ТС 4 может нести на себе (на ГП 6) также множество датчиков: лэнгмюровского типа, метеоритных, полевых и т.д. Информация с датчиков может передаваться, например, в импульсных кодах напряжения нагрузки-датчика 27 через коллектор 34 и/или 30 (фиг. 11), через контакты 20 - в бортовую цепь служебного модуля 3, где в этом случает следует предусмотреть соответствующие декодеры, преобразующие и запоминающие устройства.
При необходимости (для исключения взаимных наводок), для обеспечения работы ЭПС в напряженном режиме может быть предусмотрено несколько независимых коллекторов 34 и/или 30 и соответствующее число контактов 20. Различные нагрузки, таким образом, будут иметь независимые электрические цепи 37 (фиг.11).
Часть экспериментального оборудования может располагаться на КА 1 (фиг. 1), который - посредством штанги 2 и бортовой системы управления движением - способен занимать различные положения относительно контура ТС 4 и получать ввиду этого данные о параметрах среды в различных зонах вблизи ТС.
Предлагаемая динамическая ТС позволяет с помощью доступных технических средств обеспечить информативное изучение ионосферных феноменов и рабочих характеристик, связанных с функционированием новых типов космических крупногабаритных энергоинформационных систем.
Использование: крупногабаритные космические системы, формируемые полем центробежных сил и предназначаемые для выполнения разнообразных задач в околопланетной среде, в частности - для исследований электромагнитных и плазмодинамических процессов в ионосфере и магнитосфере Земли, связанных с работой энергетического и антенного оборудования орбитальных тросовых систем (ТС). Сущность изобретения: ТС 4, развертываемая с борта космического аппарата (КА) 1 посредством служебного модуля 3 на выносной штанге 2, содержит гибкий каркас 5 и прикрепленную к нему гибкую поверхность (ПГ) 6, на которой выполнены электропроводящие элементы: коллекторы ионов и электронов, антенны, кабельно-коммутационные средства и т.д. Кольцевая форма ТС 4 создается приданием каркасу 5 контурного движения со скоростью V - с помощью, например, линейного индукционного электродвигателя модуля 3. Электрическая связь элементов на ГП 6 с бортовыми источниками напряжения и управляющими схемами обеспечивается контакторами механического или плазменного типа, взаимодействующими с электропроводящими зонами (кольцами) ГП. Пространственная ориентация контура ТС 4 может изменяться с геомагнитным полем B⊕ . Положение КА 1 относительно ТС 4 может целесообразно изменяться в процессе функционирования системы. 11 з.п. ф-лы, 11 ил.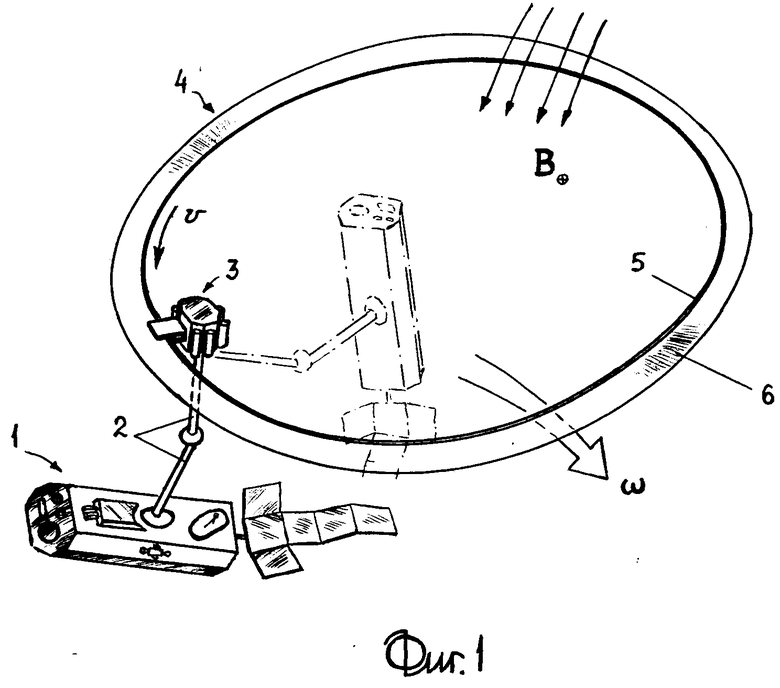
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Зайцев С.Ю., Кошелев В.А | |||
| и др | |||
| Свет из космоса | |||
| - М.: Наука в России, 1994, N 2 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Куркин В., Андреев А | |||
| Динамические тросовые системы в фундаментальных исследованиях по космической физике /Междун.н.-т.конф | |||
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Сб.докладов, т.8, Секц | |||
| "Механика и биомеханика"//МГТУ, 1991, с.32-33. | |||
