Изобретение относится к приборостроению и предназначено для формирования информационного поля лазерных систем телеориентации и навигации, оптической связи и может использоваться при управлении, посадке и стыковке летательных аппаратов, проводке судов через узости или створы мостов, дистанционном управлении робототехническими устройствами в опасных для человека зонах и т.д.
Для формирования информационного поля (ИП) лазерной системы телеориентации (ЛСТ) широко используются устройства, основанные на пространственном кодировании светового поля модулирующим растром (Заявка 1395246, Великобритания, заявл. 17.10.72 г. опубл. 21.05.75 г. кл G 01 S 1/70). Однако такой аппаратуре присущи значительные световые потери на модулирующем растре, а применение телескопической оптической системы с переменным увеличением увеличивает вес и габариты системы. Кроме того, закон изменения программной дальности телескопа рассчитывается под заданный тип управляемого объекта, что ограничивает возможности применения.
Наиболее близким к заявляемому техническому решению является устройство формирования ИП ЛСТ (прототип), основанное на поэлементном сканировании лазерного пучка с "иглообразной" диаграммой направленности. (Заявка 2133652, Великобритания. Заявл. 14.11.83 г. N 8330302, опубл. 24.07.84 г. F 41 G 7/00, G 01 S/70), (В.П.Семенков, О.Т.Чижевский. Перспективы создания многоканальных лазерных систем телеориентации управляемых объектов. Научно-технический сборник "Боеприпасы и спецхимия", сер. "Боеприпасы", М. ЦНИИМТИК ПК, 1995, в. 5-6, с. 26-30). В таком устройстве лазерный пучок совершает возвратно-поступательное сканирование вначале по одной координате с дискретным переходом по ортогональной координате после завершения каждого возвратно-поступательного движения лазерного пучка, а затем, после заполнения лазерным излучением прямоугольного растра, направление сканирования меняется на ортогональное. Выделение координат управляемого объекта в ИП ЛСТ основано на измерении временного интервала между двумя принимаемыми лазерными сигналами во время возвратно-поступательного сканирования лазерного пучка.
Для регулирования размеров ИП в плоскости управляемого объекта осуществляется выбор угла сканирования таким образом, чтобы произведение угла сканирования на дальность соответствовало размерам ИП. Недостатком такой системы телеориентации являются ограничения по дальности работы. Для обеспечения заданной точности ΔK выделения координат в ИП ЛСТ строка ИП должна содержать N элементов разрешения: N=l/ ΔK где l линейный размер ИП.
Очевидно, что при условии сохранения заданной точности ЛСТ, наименьшая Lmin и наибольшая Lmax дальности работы системы связаны отношением: Lmax/Lmin= Nd/N, где Nd число элементов разрешения сканирующей системы (дефлектора) ЛСТ. Ограниченное число элементов разрешения дефлектора определяет диапазон рабочих дальностей ЛСТ.
Целью настоящего изобретения является повышение диапазона рабочих дальностей ЛСТ.
Поставленная цель достигается тем, что в известную лазерную систему телеориентации, включающую последовательно соединенные лазер и двухкоординатный анизотропный акустооптический дефлектор, а также оптический отражатель, телескоп и блок управления дефлекторами, выходы которого подключены к управляющим входам дефлектора, введены последовательно соединенные с дефлектором управляемый переключатель поляризации и поляризационная призма, а также последовательно соединенные блок формирования сигнала дальностей и блок управления переключателем поляризации, причем оптический отражатель и телескоп последовательно включены со вторым выходом поляризационной призмы, выход блока управления переключателем поляризации соединен с управляющим входом переключателя поляризации, а информационный вход блока переключения сигнала дальности подключен к внешнему источнику сигнала синхронизации.
На фиг. 1 представлена блок-схема лазерной системы телеориентации.
Она содержит лазер 1, включающий лазерный излучатель 2 и коллиматор 3, двухкоординатный акустооптический дефлектор (АОД) 4, включающий анизотропные акустооптические ячейки (АОЯ) 5 и 6, управляемый переключатель поляризации (УПП) 7, поляризационную призму 8, оптический отражатель 9, телескоп 10, блок управления дефлекторами (БУД) 11, блок управления переключателем поляризации (БУПП) 12 и блок формирования сигнала дальности (БФСД) 13.
Лазерный пучок излучателя 2 проходит коллиматор 3, двухкоординатный дефлектор 4, УПП 7 и поляризационную призму 8. Выходы БУД 11 подключены к пьезоэлектрическим преобразователям АОЯ 5 и 6 дефлектора 4. Выход БФСД 13 через БУПП 12 подключен к управляющему входу переключателя поляризации 7. Вход БФСД 13 предназначен для подключения к внешнему источнику сигнала синхронизации.
БУД 11 формирует перестраиваемые во времени высокочастотные сигналы fz и fy, подаваемые на АОЯ 5 и 6 дефлектора 4, под воздействием которых лазерный пучок, проходя дефлектор 4, отклоняется по двум координатам. Для осуществления дифракции в анизотропной среде поляризация  падающего на АОЯ 5 лазерного пучка должна быть перпендикулярна плоскости пьезообразователя АОЯ, т.е. она ориентирована в плоскости чертежа. После прохождения одной АОЯ поляризация дифрагированного лазерного пучка ортогональна поляризации падающего пучка, т.е. поляризация отклоненного в двух плоскостях лазерного пучка на выходе дефлектора 4 совпадает с поляризацией падающего на дефлектор пучка и представлена на чертеже стрелкой
падающего на АОЯ 5 лазерного пучка должна быть перпендикулярна плоскости пьезообразователя АОЯ, т.е. она ориентирована в плоскости чертежа. После прохождения одной АОЯ поляризация дифрагированного лазерного пучка ортогональна поляризации падающего пучка, т.е. поляризация отклоненного в двух плоскостях лазерного пучка на выходе дефлектора 4 совпадает с поляризацией падающего на дефлектор пучка и представлена на чертеже стрелкой 
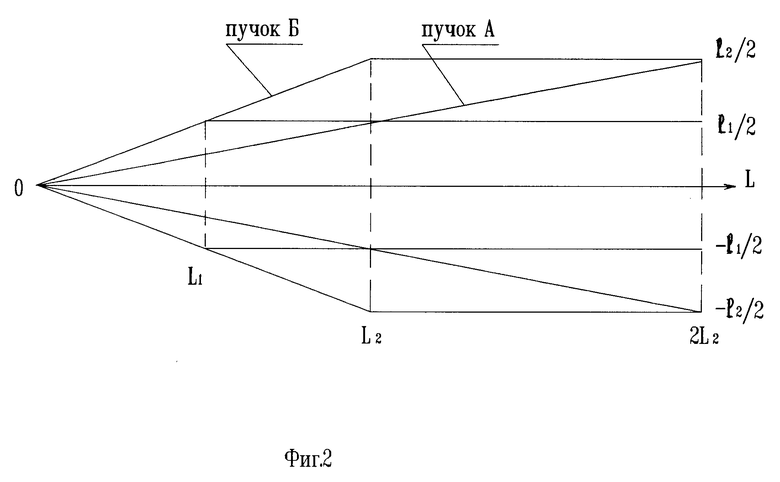
Блок формирования сигнала дальности 13 вырабатывает сигнал Uл, логическое состояние которого зависит от дальности управления. Если объект управления находится на дальностях L1 L2, БФСД 13 вырабатывает, например, сигнал Uл= 1. Если объект управления находится на дальностях L2 2L2, то БФСД 13 вырабатывает, например, сигнал Uл=0.
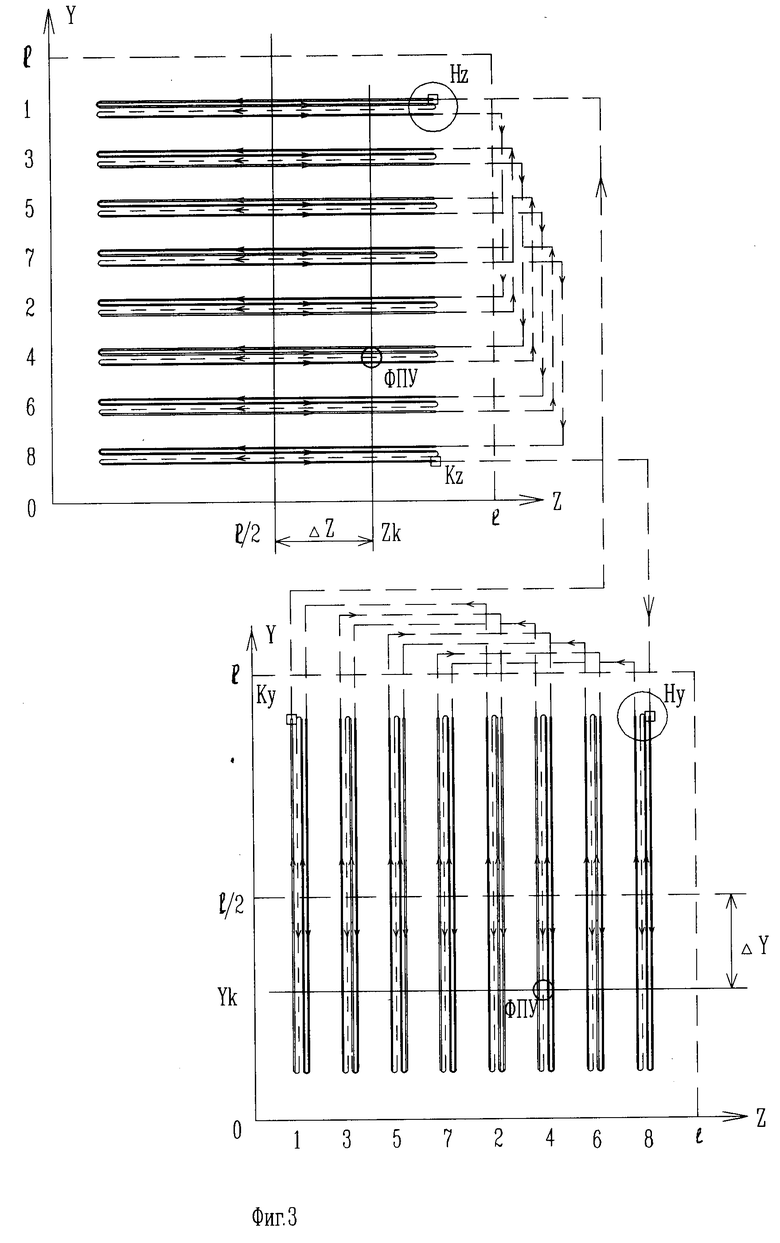
При формировании БФСД 13 сигнала Uл=1 включается БУПП 12 и формируется сигнал Uб управления переключателем поляризации 7. При этом БУПП 12 поворачивает плоскость поляризации лазерного пучка, проходящего через него и сканирующего в двух направлениях, на 90o и она занимает положение, обозначенное на фиг. 1 точкой (•) При этом лазерный пучок отражается внутренней гранью поляризационной призмы, отражается оптическим отражателем 9 и после прохождения телескопа 10 образует в пространстве растр ИП (фиг. 1, поз. Б). Вид растра определяется законом изменения частот управления fz и fy и может, например, иметь траекторию движения лазерного пучка, как и в прототипе, представленную на фиг. 3.
При формировании БФСД 13 сигнала Uл=0 включения БУПП 12 не происходит, сканирующий пучок проходит переключатель поляризации 7 без поворота плоскости поляризации и далее прямо проходит поляризационную призму 8, образуя в пространстве растр (фиг. 1, поз. А), угловые размеры Φa которого численно равны углу сканирования Φд дефлектора, т.е. Φa= Φд
Лазерный растр Б, образованный после прохождения лазерным пучком телескопа 10 будет иметь угловые размеры Φб= ГΦд где Г-кратность телескопа 10. При выборе, например, Г=2 дистанция управления предлагаемой системы телеориентации удваивается, так как на дистанциях L1 L2 и L2 2L2 линейные размеры информационного поля будут находится в одинаковом допуске от l1 до l2 (фиг. 2).
В качестве акустооптического дефлектора предложенного устройства может быть использован, например, дефлектор со светозвукопроводом из оптически активного анизотропного кристалла парателлурита (TeO2), обеспечивающего сканирование лазерных пучков видимого и ближнего ИК-спектров и имеющего световую апертуру до 10.15 мм.
В качестве управляемого переключателя поляризации целесообразно использовать акустооптический фильтр с анизотропной дифракцией, рассчитанной на длину волны используемого лазера. Для лазеров видимого и ближнего ИК-спектра в качестве светозвукопровода акустооптического фильтра можно использовать кристалл парателлурит. Акустооптический фильтр из парателлурита обеспечивает переключение поляризации падающего на него лазерного пучка при углах падения ±1,5o 2o, что соответствует предельным углам сканирования акустооптического дефлектора.
При использовании в качестве УПП 7 акустооптического фильтра, БУПП 12 представляет собой управляемый высокочастотный генератор, формирующий выходной высокочастотный сигнал Uб, например, при наличии сигнала управления (Uл= 1) и отключающийся при отсутствии (Uл=0) сигнала управления. Для лазера с длиной волны 1,06 мкм частота генератора 12, необходимая для управления акустооптического фильтра 7, может составить, например, 25,1 МГц.
В качестве БФСД 13 может использоваться, например, счетчик временных интервалов, который включается после начала управления объектом сигналом синхронизации Uс от внешнего устройства, например, кнопки. В ряде случаев известна скорость удаления объекта управления, поэтому счетчик временных интервалов формирует сигнал высокого уровня (Uл=1) от начала управления до момента времени T0, при котором объект управления достигает дальности L2. До времени T0 ЛСТ формирует лазерный растр Б с увеличенными размерами. После отсчета времени T0 счетчик формирует сигнал Uл=0 и ЛСТ формирует лазерный растр А.
Отметим, что если ЛСТ формирует ИП, размеры которого изменяются от l1 до l2 на дальностях от L1 до L2 и затем на дальностях от L2 до 2L2, то БУД 11, формирующий сигналы управления дефлектором 4, имеет структуру прототипа, которая определяется траекторией движения лазерного пучка. Начало работы БУД 11 при этом определяется, например, сигналом синхронизации Uс.
В общем случае, при регулировании ЛСТ размеров ИП в плоскости управляемого объекта, сигнал Uл от БФСД 13 может быть использован для переключения параметров БУД 11 при формировании ИП на дальностях от L2 до 2L2.
Использование новых электронных блоков и связей выгодно отличает предлагаемое устройство формирования информационного поля, так как диапазон рабочих дальностей увеличивается по крайней мере вдвое.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2000 |
|
RU2177208C1 |
| ТЕРМОКОМПЕНСИРОВАННАЯ ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2243626C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С КАНАЛОМ ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ (ВАРИАНТЫ) | 2009 |
|
RU2410722C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2267734C2 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С ПОВЫШЕННОЙ ПОМЕХОУСТОЙЧИВОСТЬЮ | 1996 |
|
RU2110808C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПОСТОЯННЫХ РАЗМЕРОВ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ В ПЛОСКОСТИ УПРАВЛЯЕМОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2093849C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2080615C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ ОБЪЕКТА | 2017 |
|
RU2664666C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2099730C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ ОБЪЕКТА | 2016 |
|
RU2619827C1 |
Изобретение относится к приборостроению и предназначено для формирования информационного поля лазерных систем телеориентации и навигации, оптической связи и может быть использовано при управлении, посадке и стыковке летательных аппаратов, проводке судов через узости или створы мостов, дистанционном управлении робототехническими устройствами в опасных для человека зонах и т.д. Лазерная система телеориентации выполнена двухканальной. Углы сканирования лазерных растров каждого канала различны. Переключение каналов осуществляется электронным способом за время не более 10 мкс. Введение второго канала обеспечило по крайней мере вдвое большую дистанцию управления. 1 з.п. ф-лы, 3 ил.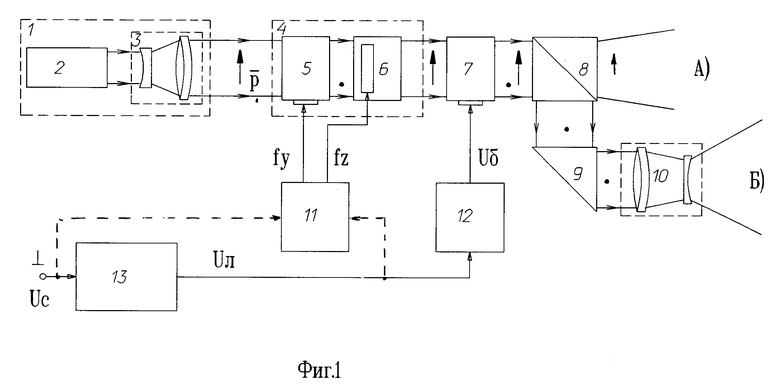
| GВ, патент, 2133652, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
