Изобретение относится к приборостроению и предназначено для формирования информационного поля лазерных систем телеориентации и навигации, оптической связи и может быть использовано при управлении, посадке и стыковке летательных аппаратов, проводке судов через узости или своды мостов, дистанционном управлении робототехническими устройствами в опасных для человека зонах и т. п.
Известно устройство для формирования информационного поля (ИП) лазерной системы телеориентации (JICT), основанное на поэлементном сканировании лазерного пучка "иглообразной" диаграммой направленности (В.П. Семенков, О.Т. Чижевский. Перспективы создания многоканальных лазерных систем телеориентации управляемых объектов. Научно-технический сборник "Боеприпасы и спецхимия", сер. "Боеприпасы", М.: ЦНИИНТИКПК, 1995, в. 5-6, с. 26- 30). В таком устройстве лазерный пучок совершает возвратно-поступательное сканирование вначале по одной координате с дискретным переходом по ортогональной координате после завершения каждого возвратно-поступательного движения лазерного пучка, а затем, после заполнения лазерным излучением прямоугольного растра, направление сканирования меняется на ортогональное. Выделение координат управляемого объекта в ИП ЛСТ основано на измерении временного интервала между двумя принимаемыми лазерными сигналами во время возвратно-поступательного сканирования лазерного пучка.
Наиболее близкой к заявляемому техническому решению является лазерная система телеориентации с увеличенным диапазоном рабочих дальностей (патент RU N 2093848, МПК 6 G 01 S 1/70, 17/87, приоритет 28.11.95) (прототип), включающая последовательно соединенные лазер и двухкоординатный анизотропный акустооптический дефлектор, оптический отражатель, телескоп, блок управления дефлекторами, выходы которого подключены к управляющим входам дефлектора, а также последовательно соединенные с дефлектором управляемый переключатель поляризации, поляризационную призму и последовательно соединенные блок формирования сигнала дальности и блок управления переключением поляризации, причем оптический отражатель и телескоп последовательно включены со вторым выходом поляризационной призмы, выход блока управления переключателем поляризации соединен с управляющим входом переключателя поляризации, а информационный вход блока формирования сигнала дальности подключен к внешнему источнику сигнала синхронизации.
Такая лазерная система телеориентации имеет два оптических канала, углы сканирования лазерного излучения в каждом канале различны, вследствие чего в пространстве формируются лазерные информационные растры "ближней" и "дальней" зон управления.
К недостаткам известных лазерных систем телеориентации следует отнести влияние температуры на взаимное угловое положение лазерных реестров "ближней" и "дальней" зон управления, что уменьшает точность системы, а при больших изменениях температуры относительного номинального значения может привести к потере работоспособности системы, а также наличие паразитной засветки в лазерном растре "ближней" зоны от лазерного растра "дальней" зоны, плотность светового потока которого может превышать плотность полезного светового потока. Если оптический переключатель поляризации, выполненный в виде акустооптического фильтра, отклоняет с поворотом плоскости поляризации τ% падающего светового потока, а кратность телескопа равна Г, то отношение К полезного потока Б в "ближней" зоне управления к паразитному потоку Апар, прошедшего прямо поляризационную призму, равно K = Б/Aпар.= τ/Г2(1-τ). Так, при τ = 0,95 и Г=5 получим К - 0,76, то есть в центральной части "ближней" зоны управления помеховый световой поток от незакрытого полностью канала А превышает полезный световой поток канала Б, что может приводить к сбоям в работе системы и потере управляемого объекта.
Угловое смещение лазерных растров "ближней" и "дальней" зон управления в диапазоне температур связано с изменением показателей преломления и скорости акустических волн кристаллов, используемых при создании акустооптических устройств - дефлекторов и фильтра. Так как геометрия акустооптического взаимодействия в ячейках дефлекторов и фильтра различается, то законы изменения углов падения и дифракции от температуры для ячеек дефлектора и фильтра существенно отличаются и осуществить одинаковую температурную компенсацию углов дифракции этих устройств, практически невозможно.
Целью изобретения является повышение помехоустойчивости лазерной системы телеориентации путем устранения паразитных лазерных засветок между оптическими каналами и снижение температурного влияния на точность системы.
Поставленная цель достигается тем, что в лазерную систему телеориентации, включающую лазер, двухкоординатный акустоонтический дефлектор, содержащий две скрещенные анизотропные акустооптические ячейки, поляризационную призму, телескоп, оптический отражатель, блок управления дефлекторами, первый выход которого подсоединен к первой акустооптической ячейке дефлектора, и блок формирования сигнала дальности, информационный вход которого подключен к внешнему источнику сигнала синхронизации, введены третья акустооптическая ячейка дефлектора, установленная аналогично второй акустооптической ячейке и расположенная между первым выходом поляризационной призмы и телескопом, и двухканальный коммутатор высокочастотного сигнала, выходы которого соединены со второй и третьей акустооптическими ячейками, высокочастотный вход соединен со вторым выходом блока управления дефлекторами, а вход управления соединен с выходом блока формирования сигнала дальности, при этом оптический отражатель подключен ко второму выходу поляризационной призмы.
Введение третьей акустооптической ячейки дефлектора, установленной аналогично второй акустооптической ячейке и расположенной между первым выходом поляризационной призмы и телескопом, и двухканального коммутатора высокочастотного сигнала, выходы которого соединены со второй и третьей акустооптическими ячейками, высокочастотный вход соединен со вторым выходом блока управления дефлекторами, а вход управления соединен с выходом блока формирования сигнала дальности, и подключение оптического отражателя ко второму выходу поляризационной призмы позволило повысить помехоустойчивости системы путем устранения паразитных лазерных засветок между каналами и снизить температурное влияние на точность системы.
Заявителю не известны лазерные системы телеориентации, в которых бы поставленная цель достигалась подобным образом.
На фиг. 1 представлена блок-схема лазерной системы телеориентации.
На фиг. 2 представлена геометрия лазерных пучков первого и второго оптических каналов.
Лазерная система телеориентации (фиг. 1) содержит лазер 1, включающий лазерный излучатель 2 и коллиматор 3, двухкоординатный акустооптический дефлектор (АОД) 4, включающий анизотропные акустооптические ячейки (АОЯ) 5 и 6, анизотропную акустооптическую ячейку дефлектора (АОЯ) 7, поляризационную призму 8, оптический отражатель 9, телескоп 10, блок управления дефлекторами (БУД) 11, двухканальный коммутатор высокочастотного сигнала (ДКВЧС) 12 и блок формирования сигнала дальности (БФСД) 13.
Две анизотропные акустооптические ячейки 5 и 6 развернуты друг относительно друга на 90o и размещены между лазером 1 поляризационной призмой 8. Вход управления АОЯ 5 соединен с первым выходом БУД 11. Анизотропная акустооптическая ячейка 7 установлена аналогично второй акусооптической ячейке 6 и расположена между первым выходом поляризационной призмы 8 и телескопом 10. Выходы двухканального коммутатора высокочастотного сигнала (ДКВЧС) 12 соединены с АОЯ 6 и АОЯ 7. Высокочастотный вход ДКВЧС 12 соединен со вторым выходом блока управления дефлекторами (БУД) 11, а вход управления соединен с выходом блока формирования сигнала дальности (БФСД) 13. Оптический отражатель 9 подключен ко второму выходу поляризационной призмы 8.
Лазерная система телеориентации работает следующим образом.
Лазерный пучок излучателя 2 проходит коллиматор 3 и подается на АОЯ 5 дефлектора 4. Для осуществления дифракции в анизотропной среде поляризация Р падающего на АОЯ 5 лазерного пучка должна быть в плоскости пьезоэлектрического преобразователя АОЯ 5, то есть она ориентирована перпендикулярно плоскости чертежа (•) (фиг. 1). После прохождения АОЯ 5 поляризация дифрагированного лазерного пучка ортогональна (↑) (фиг. 1) поляризации падающего пучка, то есть поляризация отклоненного в двух плоскостях лазерного пучка на выходе АОЯ 6 дефлектора 4 совпадает с поляризацией падающего на АОЯ 5 дефлектора 4 лазерного пучка и представлена на фиг. 1 точкой (•).
БУД 11 формирует перестраиваемые во времени высокочастотные сигнал fy, подаваемый на АОЯ 5 дефлектора 4, и сигнал fz0, подаваемый на высокочастотный вход ДКВЧС 12. В зависимости от величины сигнала на входе управления ДКВЧС 12 высокочастотный сигнал fz подается либо на выход, соединенный с АОЯ 6, либо на выход, соединенный с АОЯ 7. Под воздействием этих сигналов лазерный пучок, пройдя АОЯ 5 и 6 или АОЯ 5 и 7, отклоняется по двум координатам.
Блок формирования сигнала дальности 13 вырабатывает сигнал управления Uл, логическое состояние которого зависит от дальности управления. Если объект управления находится на дальностях L1 - L2, БФСД 13 вырабатывает, например, сигнал Uл = 1. Если объект управления находится на дальностях L2 - L3, БФСД 13 вырабатывает, например, сигнал Uл = 0.
При формировании БФСД 13 сигнала Uл = 0, соответствующего работе системы на дальностях L2 - L3, ДКВЧС 12 переключает высокочастотный сигнал fz блока управления дефлектором 11 на выход f'z, подавая высокочастотное напряжение на АОЯ 6. При этом включены АОЯ 5 и АОЯ 6, поляризация дифрагированного лазерного излучения совпадает с поляризацией падающего на АОЯ 5 лазерного излучения, обозначенных на фиг. 1 точкой (•). Продифрагировавший на АОЯ 5 и АОЯ 6 лазерный пучок отражается внутренней гранью поляризационной призмы 8, отражается оптическим отражателем 9, выполненным, например, на призме АР - 90, и образует в пространстве лазерный растр "дальней" зоны (пучок А) для управления объектом на дальностях L2 - L3 (фиг. 2).
При формировании БФСД 13 сигнала Uл = 1 ДКВЧС 12 переключает высокочастотный сигнал fz БУД 11 на выход f''z, подавая высокочастотный сигнал на АОЯ 7, при этом включены АОЯ 5 и АОЯ 7.
Лазерный пучок, дифрагируя на АОЯ 5, изменяет поляризацию на ортогональную, представленную на фиг. 1 стрелкой (↑) , и далее проходит не включенную АОЯ 6, поляризационную призму 8 и дифрагирует на включенной АОЯ 7 (•) (фиг. 1). Продифрагировавший на АОЯ 5 и АОЯ 7 лазерный пучок проходит телескоп 10, образуя в пространстве лазерный растр "ближней" (пучок Б) зоны для управления объектом на дальностях L1 - L2 (фиг. 2).
Лазерный растр Б, образованный после прохождения лазерным пучком телескопа 10, будет иметь угловые размеры ϕб= Г•ϕд, где Г - кратность телескопа 10, а ϕд - угол сканирования дефлектора.
При выборе, например, Г = 2 дистанция управления предлагаемой системы телеориентации удваивается, так как на дистанциях L1... L2 и L2 ... 2L2 линейные размеры информационного поля будут находиться в одинаковом допуске и иметь размеры от l1 до l2 (фиг. 2).
В заявленной системе управления в каждом оптическом канале отсутствуют паразитные лазерные засветки, так как вторая и третья АОЯ (то есть АОЯ 6 и АОЯ 7), от которых могли бы появиться паразитные засветки, включаются поочередно.
В качестве акустооптических ячеек АОЯ 5, 6 и 7 в предложенном устройстве могут быть использованы, например, ячейки со светозвукопроводом из оптически активного анизотропного кристалла - парателлурита (TeO2), обеспечивающие сканирование лазерных пучков видимого и ближнего ИК-спектров и имеющие световую апертуру до 10...15 мм.
Так как конструкция всех трех используемых АОЯ одинаковая, то зависимость угла дифракции от температуры окружающей среды одинаковая для трех ячеек. Используя известный способ коррекции текущего значения частоты управляющих высокочастотных сигналов от величины отклонения текущего значения температуры относительно номинального значения, можно скомпенсировать угловое смещение лазерных растров при изменении температуры с требуемой точностью (V. Balakshy, et al. "Compensation of thermal effects in acousto - optic deflector", SPIE, Vol. 2713, 164-171).
В качестве БФСД 13 может использоваться, например, счетчик временных интервалов, который включается после начала управления объектом сигналом синхронизации Uс от внешнего устройства, например кнопки. В ряде случаев известна скорость удаления объекта управления, поэтому счетчик временных интервалов формирует сигнал высокого уровня (Uл = 1) от начала управления до момента времени, при котором объект управления достигает дальности L2. До этого времени ЛСТ формирует лазерный растр Б с увеличенными размерами. После чего счетчик формирует сигнал Uл = 0 и ЛСТ формирует лазерный растр А, при котором объект управления достигает дальности L3 = 2L2.
Начало работы БУД 11 определяется сигналом синхронизации Uс.
Таким образом, выполнение лазерной системы телеориентации с тремя одинаковыми акустооптическими ячейками, установление третьей ячейки аналогично второй, расположение ее между первым выходом поляризационной призмы и телескопом и введение двухканального коммутатора высокочастотного сигнала, позволяющего осуществлять попеременное подключение одинаковых акустооптических ячеек, расположенных до и после поляризационной призмы, к одному из выходов блока управления дефлекторами, позволило независимо формировать лазерные растры в каждом оптическом канале и тем самым повысить помехоустойчивость системы путем устранения паразитных лазерных засветок между каналами и снизить влияние температуры окружающей среды на точность системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С УВЕЛИЧЕННЫМ ДИАПАЗОНОМ РАБОЧИХ ДАЛЬНОСТЕЙ | 1995 |
|
RU2093848C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С КАНАЛОМ ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ (ВАРИАНТЫ) | 2009 |
|
RU2410722C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2267734C2 |
| ТЕРМОКОМПЕНСИРОВАННАЯ ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2243626C1 |
| КОМБИНИРОВАННЫЙ ОПТИКО-ЭЛЕКТРОННЫЙ ПРИБОР | 2011 |
|
RU2497062C2 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С ПОВЫШЕННОЙ ПОМЕХОУСТОЙЧИВОСТЬЮ | 1996 |
|
RU2110808C1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2528109C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЛАЗЕРНОГО РАСТРА | 2013 |
|
RU2532504C1 |
| СИСТЕМА ТЕЛЕОРИЕНТАЦИИ ОБЪЕКТА | 2011 |
|
RU2475966C1 |
| АКУСТООПТИЧЕСКИЙ АНИЗОТРОПНЫЙ ДЕФЛЕКТОР | 2011 |
|
RU2462739C1 |

Изобретение относится к приборостроению, предназначено для формирования информационного поля лазерных систем телеориентации и навигации, оптической связи. Технический результат - повышение помехоустойчивости ориентации. Устройство включает лазер, двухкоординатный акустооптический дефлектор, две скрещенные анизотропные акустооптические ячейки, поляризационную призму, телескоп, оптический отражатель, блок управления дефлекторами, первую акустооптическую ячейку дефлектора, блок формирования сигнала дальности, внешний источник сигнала синхронизации, третью акустооптическую ячейку дефлектора, установленную аналогично второй акустооптической ячейке и расположенную между первым выходом поляризационной призмы и телескопом, и двухканальный коммутатор высокочастотного сигнала. 2 ил.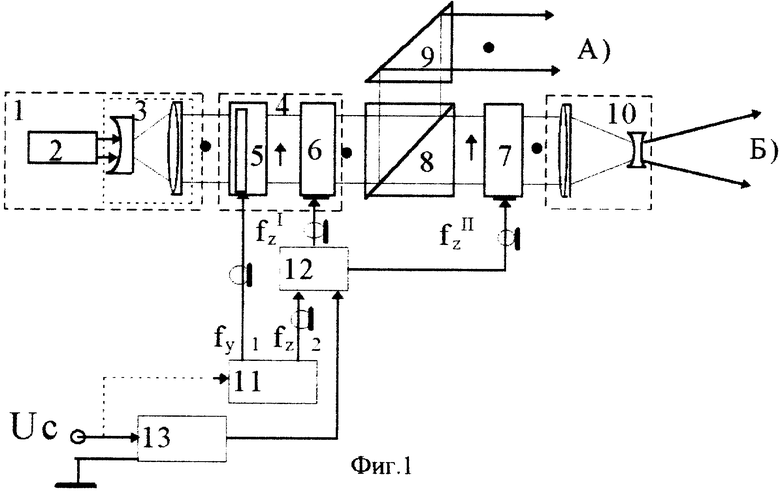
Лазерная система телеориентации, включающая последовательно установленные лазер, двухкоординатный акустооптический дефлектор, содержащий две анизотропные акустооптические ячейки, развернутые друг относительно друга на 90o, поляризационную призму и телескоп, а также оптический отражатель, блок управления дефлекторами, первый выход которого подсоединен к первой акустооптической ячейке дефлектора, и блок формирования сигнала дальности, вырабатывающий управляющий сигнал с логическим состоянием, обеспечивающим необходимую дальность управления, информационный вход которого подключен к внешнему источнику сигнала синхронизации, отличающаяся тем, что в нее введены третья акустооптическая ячейка дефлектора, установленная аналогично второй акустооптической ячейке и расположенная между первым выходом поляризационной призмы и телескопом, и двухканальный коммутатор высокочастотного сигнала, выходы которого соединены со второй и третьей акустооптическими ячейками, высокочастотный вход соединен со вторым выходом блока управления дефлекторами, а вход управления соединен с выходом блока формирования сигнала дальности, при этом оптический отражатель подключен ко второму выходу поляризационной призмы.
| СЕМЕНКОВ В.П | |||
| и др | |||
| Перспективы создания многоканальных лазерных систем телеориентации управляемых объектов | |||
| -М | |||
| : ЦНИИНТИКПК, 1995, НТС "Боеприпасы и спецхимия", с | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С УВЕЛИЧЕННЫМ ДИАПАЗОНОМ РАБОЧИХ ДАЛЬНОСТЕЙ | 1995 |
|
RU2093848C1 |
| РАСПРЕДЕЛЕННАЯ КОММУТАЦИОННАЯ СИСТЕМА СВЯЗИ | 1994 |
|
RU2138134C1 |
| Экономайзер | 0 |
|
SU94A1 |

