Изобретение относится к приборостроению и предназначено для формирования информационного поля лазерных систем телеориентации и навигации, оптической связи и может использоваться при управлении, посадке и стыковке летательных аппаратов, проводке судов через узости или створы мостов, дистанционном управлении робототехническими устройствами в опасных для человека зонах и т. д.
Для формирования информационного поля (ИП) лазерной системы телеориентации (ЛСТ) широко используется способ, основанный на пространственном кодировании светового поля модулирующим растром (Великобритания, заявка N 1395246, заявл. 17.10.72, опубл. 21.05.75, G 01 S 1/70). Однако такому способу и аппаратуре его реализующей присущи значительные световые потери на модулирующем растре, закон кодирования информационного поля определяется типом модулирующего растра, а размеры информационного поля в плоскости управляемого объекта определяются фокусным расстоянием выходной оптической системы с электромеханическим изменением фокусного расстояния.
Перестройка фокусного расстояния выходной оптической системы за счет электромеханических подвижек оптических элементов обеспечивает работу лишь с объектом, для управления которым спроектирована ЛСТ, так как она рассчитана на заданную динамику движения управляемого объекта. Так же велико время обратного хода такой оптической системы, что ограничивает быстродействие ЛСТ.
Для формирования информационного поля лазерной системы телеориентации перспективен способ, основанный на сканировании в двух ортогональных направлениях лазерного пучка с "иглообразной" диаграммой направленности. (Великобритания, заявка N 2133652, заявл. 14.11.83, N 8330302, опубл. 24.07.84, F 41 G 7/00, G 01 S 1/70). (Великобритания, заявка N 2113939, заявл. 15.11.82, N 8232554 опубл. 10.08.83, G 01 S 1/70). В таком способе и аппаратуре его реализующей для увеличения диапазона дальности работы системы с помощью оптического расщепителя полупрозрачного зеркала разделяют сканируемый лазерный пучок на два растра. Каждый из растров, проходя через выходные оптические системы с разным увеличением, имеет разные углы сканирования и, следовательно, разные угловые размеры. Однако при таком построении ЛСТ невозможно управлять размерами растра в плоскости управляемого объекта, что снижает точность наведения управляемого объекта, который измеряет линейное отклонение своего положения от центра растра, а совмещение двух растров (кадров) разных размеров на оси визирования вызывают пояснение дополнительных импульсов, ухудшающих работу бортовой аппаратуры управляемого объекта.
Целью настоящего изобретения является повышение информативности и быстродействия системы телеориентации при формировании заданных размеров информационного растра в плоскости управляемого объекта и упрощения конструкции.
Поставленная цель достигается тем, что в известном способе формирования информационного поля лазерной системы телеориентации, основанном на поочередном формировании двух прямоугольных растров, размерами lxl на дальности L, образованных за счет сканирования лазерного пучка в каждом растре по N строкам и развернутых друг относительно друга на 90 градусов, угол сканирования лазерного пучка αi при формировании растра дискретно изменяют по закону αi= l/[(1+Δ)i Lmin] где Δ [(lmax/l)-1] неравномерность растра, задаваемая в интервале значений 0,01.2, Lmin наименьшая дальность управления, i-текущий номер интервала дискретизации дальности, задаваемый в интервале 1.1024 и выбираемый из условия Lmin×(1+Δ)i-1< Lт≅ Lmin×(1+Δ)i где Lт - текущая дальность до управляемого объекта, причем сканирование по строкам в растре осуществляют дискретно с числом дискретов Ki для i-го интервала дальностей, удовлетворяющем условию Ki=32.1028, а длительность формирования строки Ti в i-м интервале дальностей удовлетворяет условию Ti= Tc± ΔT где Tc расчетное время сканирования строки, а ΔT (0.0,1) Tc.
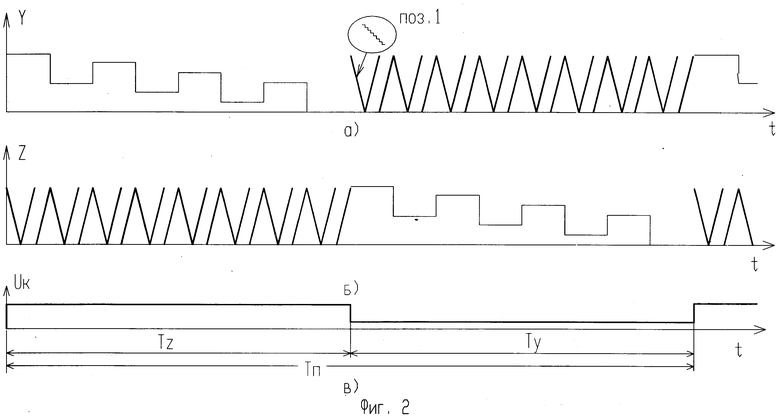
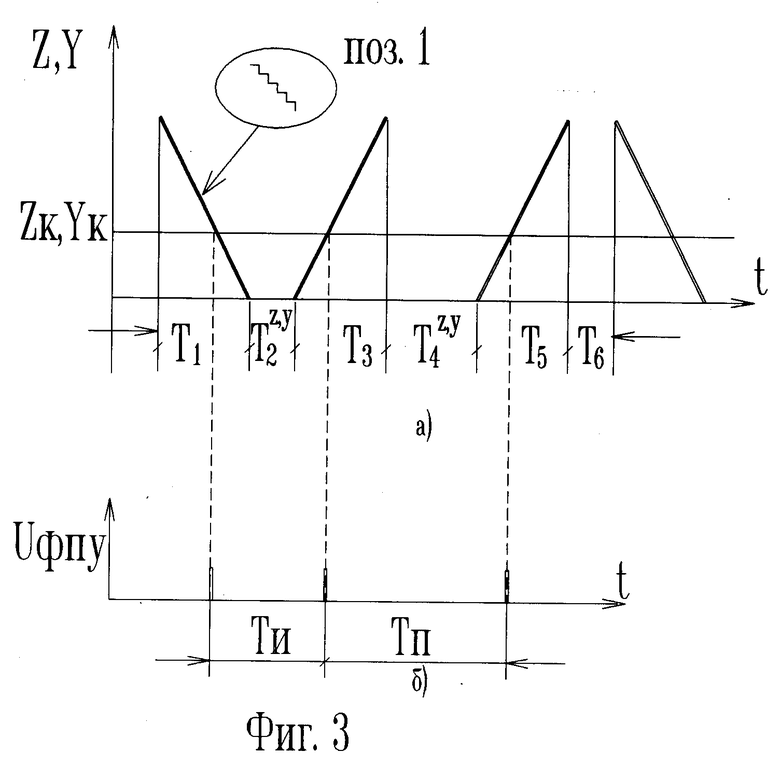
Траектория движения лазерного пучка при формировании двух кадров информационного поля (ИП) для случая строк и трех тактов строки представлена на фиг. 1. Временные эпюры положения лазерного пучка и распределения временных интервалов между первым и вторым кадрами представлены на фиг. 2. Временные эпюры сканирования лазерного пучка по строкам и импульсы фотоприемного устройства (ФПУ) управляемого объекта представлены соответственно на фиг. 3а, б. Лазерный пучок дискретно сканирует по горизонтальным строкам ИП согласно фиг. 1 до заполнения кадра, а затем по вертикальным строкам. По каждой строке лазерный пучок сканирует три раза согласно фиг. 3а, причем время задержки T4 является переменным и дискретным. Величина задержки определяет признак координаты (Z или Y). Временные интервалы сканирования тактов строк равны T1=T3=T5=Tc. Временной интервал T2 для растров с горизонтальными и вертикальными строками является постоянным, т.е. T
ФПУ, находящееся в точке (Zk, Yk), при сканировании по нему лазерным пучком формирует три импульса (фиг. 3б). Временной интервал Tи между первым и вторым импульсами определяет координату ФПУ (величину отклонения ФПУ относительно центра ИП). Временной интервал Tп определяет признак координаты (Z, Y). Лазерный пучок сканирует по каждой строке дискретно (поз. 1, фиг. 3а), причем число дискретов K при формировании строки определяет потенциальную точность выделения координат ЛСТ.
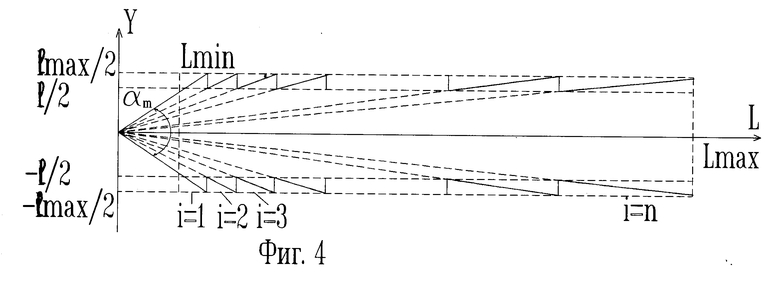
В предлагаемом способе для обеспечения постоянных размеров ИП в плоскости управляемого объекта независимо от его дальности L осуществляют изменение угла сканирования αi лазерного пучка так, чтобы выполнялось условие: l = αi×L где l линейный размер ИП, αi текущее значение угла сканирования осуществляют дискретно, при этом дистанция управления разбивается на n участков. На фиг. 4 показан принцип формирования постоянных размеров ИП в плоскости управляемого объекта.
Наибольшая Lmax и наименьшая Lmin дальности управления связаны соотношением:
Lmax= (1+Δ)n×Lmin,
где n число интервалов дискретизации дальности,
Δ [(lmax-l)/1] задаваемая неравномерность размеров ИП,
lmax и l соответственно наибольший и наименьший размеры ИП.
Наименьшая дальность при заданных размерах ИП определяется максимально возможным углом aм сканирования лазерного пучка и равна
Lmin= l/αм.
Величина дистанции ΔLi на которой формируется ИП за счет углового сканирования αi равна:
ΔLi= Lmin×[(1+Δ)i-(1+Δ)i-1],
где i номер текущего интервала дискретизации дальности.
При формировании ИП ЛСТ по каждой строке осуществляется три такта сканирования, причем каждый такт сканирования по строке осуществляется дискретно, с числом дискретов К. Для разных интервалов дальности число дискретов Кi может быть различным, что связано с техническими возможностями реализации предлагаемого способа формирования ИП, но время формирования каждого дискрета строки Δτi связано с расчетным временем формирования строки Tс соотношением: KiΔτi= Tc± ΔT Величина ΔT определяет точность ЛСТ и для ряда технических применений может быть величиной не более 0,1 Тс. Число дискретов Ki для большинства технических применений может находиться в интервале 32.1024, что при технически потребных размерах ИП l=10.300 м обеспечит ошибку выделения координат от единиц до десятка сантиметров.
Технически удобно на дистанции управления Lmax/Lmin=2 использовать восемь дискретизаций дальности, при этом величина каждого интервала ΔLi равна:
а угол сканирования αi необходимо уменьшать от максимального αм по закону:
αi= αм/(1,0905)i.
После завершения управления объектов на последнем, восьмом дискрете дальности угол сканирования необходимо уменьшить ровно в два раза.
Поэтому удобно дистанцию управления разбить на участки, начало и конец каждого участка связаны соотношением Lmax,s/Lmin,s=2, где s - текущий номер участка, а вся дистанция управления Lmax-Lmin может быть определена как
Lmax/Lmin=Lmin•2s.
Угол сканирования лазерного пучка при этом изменяется по закону:
αi,s= αм/[(1,0905)i×2s-1].
Таким образом для всех дистанций управления необходимо лишь восемь точных угловых положений лазерного пучка, а дополнительные углы образуются из этих углов путем их уменьшения равно 2, 4, 8 и т.д. раз, что удобно технически. Неравномерность размеров ИП при описанном способе формирования ИП составляет величину Δ 0,09, т.е. около 9% что пригодно для всех практических применений.
В качестве примера рассмотрим ЛСТ для работы на дальностях Lmin=100, Lmax=800 м при размерах ИП равных l=10 м.
При этом aм l/Lmin=0,1 рад.
Определим число участков Lmax/Lmin=8, т.е. 2s=8, следовательно S=3. Три участка дистанции имеют следующие величины: 100.200 м, 200.400 м, 400.800 м. Каждый из участков разбит на восемь интервалов. Для первого участка величины интервалов равны: 100.109,05 м; 109,5.119,9 м и т.д.
Так же нетрудно подсчитать требуемые углы сканирования для каждого интервала заданного участка.
Таким образом, в сравнении с прототипом, предлагаемый способ формирования управляемого объекта с заданной неравномерностью размеров в ИП.
Реализация заявленного способа и поставленной цели достигается тем, что в устройство формирования ИП лазерной системы телеориентации, включающее последовательно установленные лазерный излучатель и двухкоординатный акустооптический дефлектор, а также генератор тактовой частоты, формирователь кодов строк, формирователь кодов номеров строк, первый и второй преобразователь код-частота, выходы которых соединены соответственно с первым и вторым управляющими входами дефлектора, введены управляемый делитель частоты, преобразователь кодов, формирователь временных интервалов, управляемый инвертор, формирователь структуры строк, два мультиплексора и два умножителя кодов, информационные выходы формирователя кодов строк через управляемый инвертор соединены с первой входной шиной первого мультиплексора и второй входной шиной второго мультиплексора, выходы которых через умножители кодов соединены со входами преобразователей код-частота, выход признака конца такта строки формирователя кодов строк соединен с первым установочным входом формирователя временного интервала и через формирователь структуры строк соединен с управляющим входом управляемого инвертора, вторым установочным входом формирователя временных интервалов и счетным входом формирователя кодов номеров строк, информационные выходы которого соединены со второй входной шиной первого мультиплексора и первой входной шиной второго мультиплексора, а выход признака длительности кадра соединен с управляющими входами мультиплексора и третьим установочным входом формирователя временных интервалов, выход которого соединен со входом выбора режима формирователя кодов строк, при этом выход генератора тактовой частоты соединен со счетным входом формирователя временных интервалов и через делитель частоты со счетным входом формирователя кодов строк, выходы преобразователя кодов соединены со входами начальной установки формирователя кодов строк и формирователя кодов номеров строк, входная шина управления делителя частоты, предназначенная для подключения внешнего источника кода Md дробного масштабирования, соединена параллельно со входной шиной преобразователя кодов, а вторые входные шины умножителей кодов, соединенные параллельно, предназначены для подключения внешнего источника Mк кратного масштабирования.
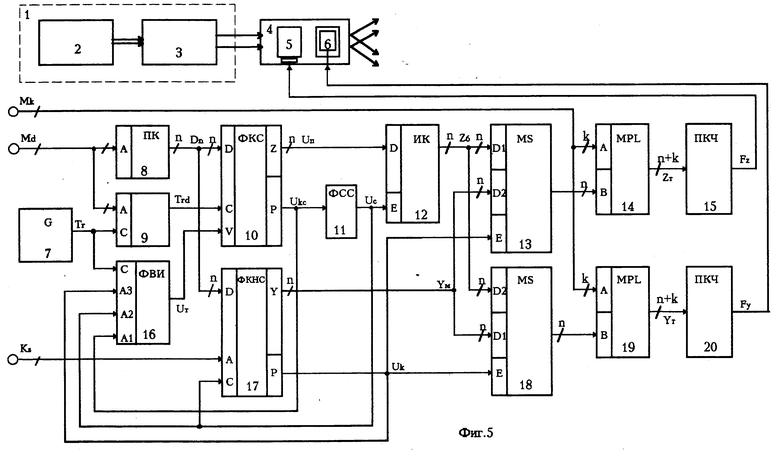
На фиг. 5 представлена блок-схема устройства формирования ИП ЛСТ.
Оно содержит лазерный излучатель 1, включающий лазер 2 и телескопическую систему 3, двухкоординатный акустооптический дефлектор 4, включающий две акустооптические ячейки 5 и 6, генератор тактовой частоты 7, преобразователь кодов 8, делитель частоты 9, формирователь кодов строк 10, формирователь структуры строк 11, управляемый инвертор 12, мультиплексоры 13 и 18, умножители кодов 14 и 19, преобразователи кодов частоты 15 и 20, формирователь временных интервалов 16 и формирователь кодов номеров строк 17.
Выходной пучок лазера 2 проходит телескоп 3 и двухкоординатный акустооптический дефлектор (АОД) 4. Тактовые импульсы генератора 7 подаются на счетный вход С формирователя временных интервалов (ФВИ) 16 и через делитель частоты 9 на счетный вход формирователя кодов строк (ФКС) 10. Выходы преобразователя кодов 8 соединены с шинами данных D ФКС 10 и формирователя кодов номеров строки (ФКНС) 17. Информационные выходы ФКС 10 через управляемый инвертор 12 соединены с первой входной шиной D 1 мультиплексора 13 и второй входной шиной D 2 мультиплексора 18. Выходные шины мультиплексоров 13 и 18 через умножители кодов 14 и 19 соединены с преобразователями код-частота 15 и 20, выходы которых подключены к управляющим входам акустооптических ячеек 5 и 6 дефлектора 4. Выход признака такта строки ФКС 10 соединен с установочным входом А 1 ФВИ 16 через формирователь структуры строк (ФСС) 11 соединен с управляющим входом E инвертора 12, установочным входом А 2 ФВИ 16 и счетным входом ФКНС 17. Информационные выходы ФКНС 17 соединены со второй входной шиной D 2 мультиплексора 13 и первой входной шиной D 1 мультиплексора 18. Выход признака длительности кадра ФКНС 17 соединен с управляющими входами E мультиплексоров 13 и 18 и с установочным входом А 3 ФВИ 16. Выход ФВИ 16 соединен со входом V выбора режима ФКС 10. Входы A преобразователя кодов 8 и входов управления делителя частоты 9 соединены параллельно и предназначены для подключения к внешнему источнику кодов Md дробного масштабирования. Управляющие входы A умножителей кодов 14 и 19 включены параллельно и предназначены для подключения к внешнему источнику кодов Mк кратного масштабирования.
Электронные схемы 7-14, 16-19 формируют два цифровых кода Zт и Yт, закон изменения которых осуществляется в соответствии с временными диаграммами, представленными ан фиг. 2, а амплитуда их изменений задается внешними кодами Md и Mk, т.е.
Zт Zт.max/(Mк•Md)
Yт Yт.max/(Mк•Md),
где Zт.max и Yт•max- максимальная амплитуда изменения сигналов Zт и Yт, Mк 1, 2, 4, 8, и т.д.  .
.
Цифровые коды управляют работой преобразователей код-частота 15 и 20 таким образом, что высокочастотные выходные сигналы преобразователей 15 и 20 имеют частоты fz и fy, удовлетворяющие условиям:
fz K1 + K2 • Zт;
fy K1 + K2 • Yт,
где K1 и K2 коэффициенты пропорциональности.
Высокочастотные сигналы преобразователей 15 и 20 подаются на пьезоэлектрические преобразователи акустооптических ячеек (АОЯ) дефлектора 4, возбуждая в них акустические волны. Лазерный пучок 2 уширяется коллиматором 3 для получения требуемой световой апертуры и угловой расходимости и, проходя АОЯ дефлектора 4, отклоняется в двух направлениях, пропорционально частотам fz и fy. Так как частоты переменные, то лазерный пучок при сканировании образует прямоугольный растр (фиг.1), являющийся информационным полем для управления. Величина амплитуды углового отклонения определяется диапазоном изменения частот fz и fy и уменьшается при увеличении коэффициентов управления Mк и Md, обеспечивая тем самым постоянные размеры ИП при увеличении дальности (фиг. 4).
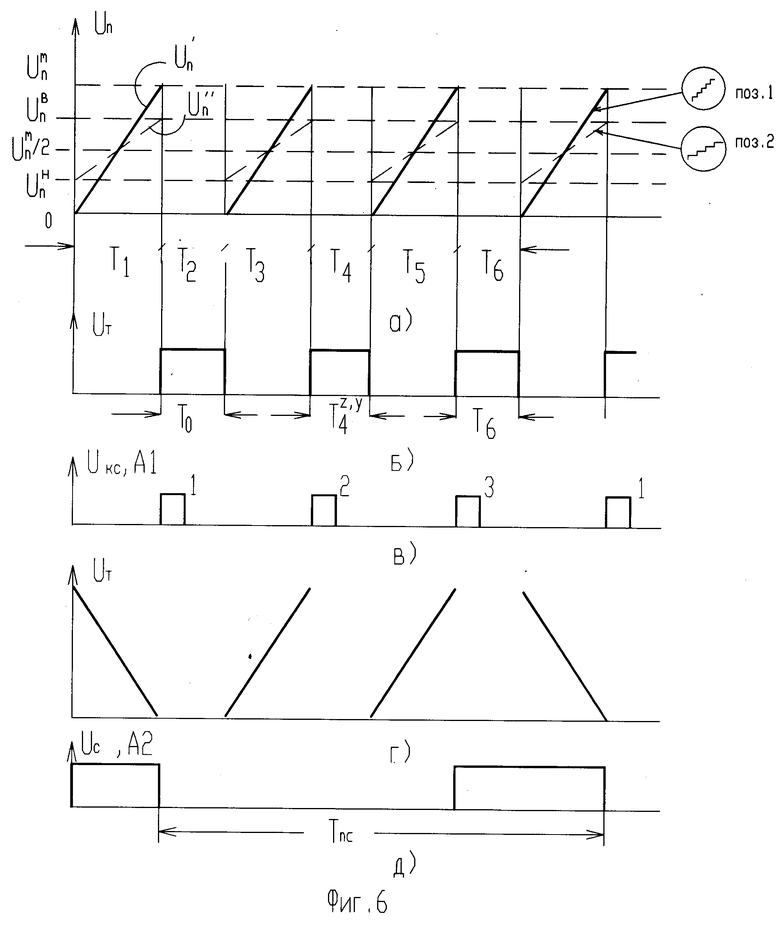
Работа электронных схем формирования цифровых кодов Zт и Yт происходит согласно временным диаграммам, представленным на фиг. 6. ФКС 6, представляющий собой, например, синхронный счетчик со входом начальной установки D, при поступлении на его счетный вход импульсов с выхода делителя частоты 9, формирует двоичные коды, величина которых U периодически изменяется от минимального U
Коэффициент Md может принимать восемь значений: 0, 1, 2.7 в десятеричном коде. При Md=0 на выходе ПК устанавливается максимальное значение Dn и ФКС формирует коды от 0 до максимального значения U
Для предельного значения Md=7 амплитуда изменения выходного кода ФКС 10 в 27/8 1,8 раза меньше максимального значения (фиг. 6а, поз. 2). После окончания каждого периода счета такта ФКС 10 на его выходе признака конца такта строки появляется импульс Uкс (фиг.ю 6в), поступающий на вход A 1 ФВИ 16 и на счетный вход ФСС 11.
1,8 раза меньше максимального значения (фиг. 6а, поз. 2). После окончания каждого периода счета такта ФКС 10 на его выходе признака конца такта строки появляется импульс Uкс (фиг.ю 6в), поступающий на вход A 1 ФВИ 16 и на счетный вход ФСС 11.
ФСС 11, представляющий собой, например, делитель частоты на 3 на основе сдвигающих регистров, формирует сигнал Uc (фиг. 6д) управления инвертором 12. Период повторения сигнала Uc равен времени Tпc формирования строки, содержащей три такта, включая задержки между тактами.
Управляемый инвертор 12, представляющий собой, пример, логическую схему Исключающее ИЛИ, осуществляют либо прямую передачу кодов ФКС 10 (Uc=0), либо инверсию кодов (Uc=1) ФКС 10, при этом величина кодов изменяется от максимального до максимального, что обеспечивает обратное сканирование лазерного пучка в строке (фиг. 6г).
ФКНС 17, на счетный вход которого поступает выходной сигнал Uc ФСС 11, осуществляется за счет числа строк в кадре ИП, причем диапазон счета, как и в ФКС 10, задается кодом Dn, устанавливаемым преобразователем кодов 8. ФКНС 17, в диапазоне кодов U
Умножители кодов 14 и 19 управляются внешним кодом Mк кратного масштабирования. Они обеспечивают уменьшение величины входных кодов, подаваемых на их входы с мультиплексоров 13 и 18 в 2p раз, где p 0, 1, 2.8, при этом размеры астра ИП либо остаются постоянными (Мк=1, p=0), либо уменьшаются в два (Мк, p=1), четыре (Мк=3, p=2) и т.д. раз.
Формирователь временных интервалов 16 под воздействием входных сигналов на установочных входах А1-А3 формирует строб Uт (фиг. 6б), используемый для записи данных Dn в ФКС 10. Во время подачи строба на вход V запись/чтение ФКС 10 счет входных импульсов Tгd в ФКС прекращается, чем и формируются временные задержки T2, T4 и T6. Длительность строба Uт зависит от состояния сигналов на его установочных входах А1-А3, определяющих признак, т.е. длительность задержек T0 T
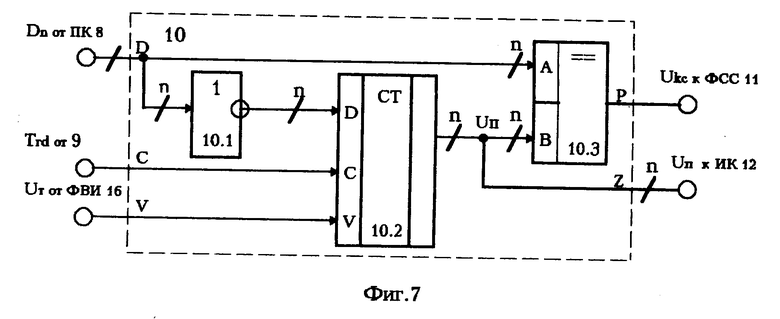
Вариант блок-схемы ФКС 10 приведены на фиг. 7, а временные диаграммы его сигналов на фиг. 9. ФКС 10 состоит из n-разрядных элементов: инвертора 10.1, синхронного счетчика 10.2 и схемы сравнения 10.3. На вход ФКС поступает n-разрядный код Dn данных начала и конца такта строки, инверсное значение которого при сигнале Uт=1 от ФВИ 16 записывается в счетчик 10.2 под управлением импульсов Тгд генератора 7. При Uт=0 счетчик 10.2 переключается в режим счета и его выходной код Un изменяется в диапазоне от Dn до Dn. При достижении выходным кодом счетчика 10.2 значения Un=Dn схема сравнения 10.3 формирует импульс высокого уровня Uкc (фиг. 9.2) длительностью не более периода тактовой частоты Tгд, имеющий признак конца такта строки, который используется для синхронизации работы ФВИ 16 и ФСС 11.
Выходной код счетчика 10.2 соответствует текущему коду строк Un ФКС 10.
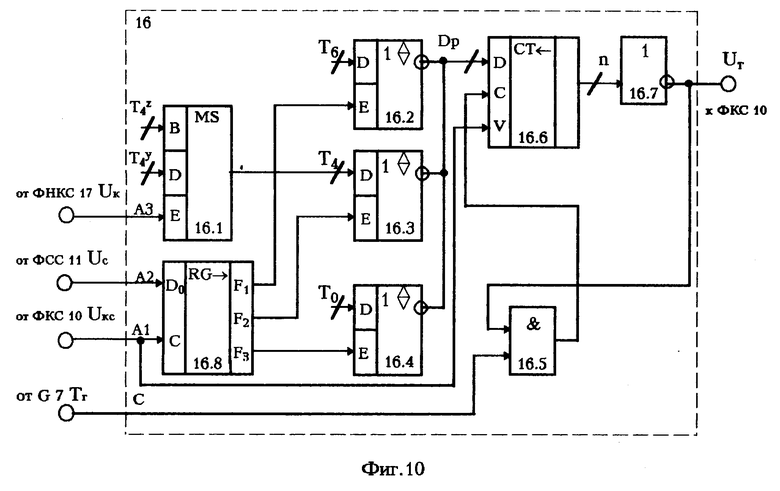
Вариант блок-схемы ФВИ 16 представлен на фиг. 10, а эпюры его сигналов - на фиг. 9. ФВИ 16 содержит мультиплексор 16.1, передатчики 16.2, 16.3 и 16.4, логическую схему 2И 16.5, реверсивный счетчик 16.6, n-разрядную логическую схему ИЛИ 16.7, сдвиговый регистр 16.8. Передатчики 16.2-16.4 имеют инверсные выходы, отключаемые в третье (высокоимпендансное) состояние. На информационных входах B и D мультиплексора 16.1 устанавливаются коды T
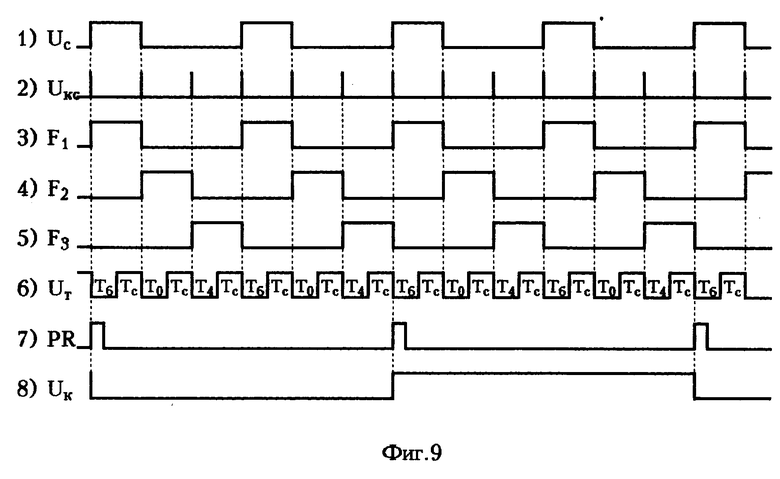
При поступлении на счетный вход С сдвигового регистра 16.8 импульсов Uкс от ФКС 10 (фиг. 9.2) и сигналов Uc от ФСС 11 на информационный вход Do (фиг. 9.1) сдвиговый регистр осуществляет последовательный сдвиг информации, формируя на своих выходах F1, F2 и F3 стробы (фиг. 9.3.-9.5), используемые для установки кода Ti начальных данных счетчика 16.6.
Первый импульс Uкс формирует на выходе F1 сдвигового регистра 16.8 сигнал F1= 1, т.к. на информационном входе D регистра 16.8 в это время сигнал Uc=1 (фиг. 9.1, 9.2). Сигнал F1=1 включает передатчик 16.2, на входе которого установлен код Т6 и под действием первого импульса Uкс код Т6 записывается в счетчик 16.6, установленный в режим вычитания. На выходе счетчика 16.6 появляется код, отличный от нуля, и на выходе n-разрядной схемы ИЛИ 16.7 устанавливается сигнал высокого уровня, разрешая прохождение через схему 2И 16.5 импульсов от делителя частоты 9 на счетный вход счетчика 16.6. Счетчик 16.6 начинает отсчет. Через время Т6 выходной код счетчика 16.6 устанавливается в нулевое состояние, запрещая тем самым прохождение через схему 16.5 на вход С счетчика 16.6 импульсов делителя частоты 9.
При появлении второго импульса Uкс происходит установка высокоуровнего сигнала на выходе F2, при этом в счетчике 16.6 записывается код Т0 и формируется интервал Т0 (фиг. 9.6). По третьему импульсу Uкс происходит установка высокоуровнего сигнала на выходе F3, при этом в счетчик 16.6 записываются коды T
Выходной сигнал n-разрядной схемы ИЛИ 16.7 является выходным сигналом Uт ФВИ 16 (фиг. 9.6).
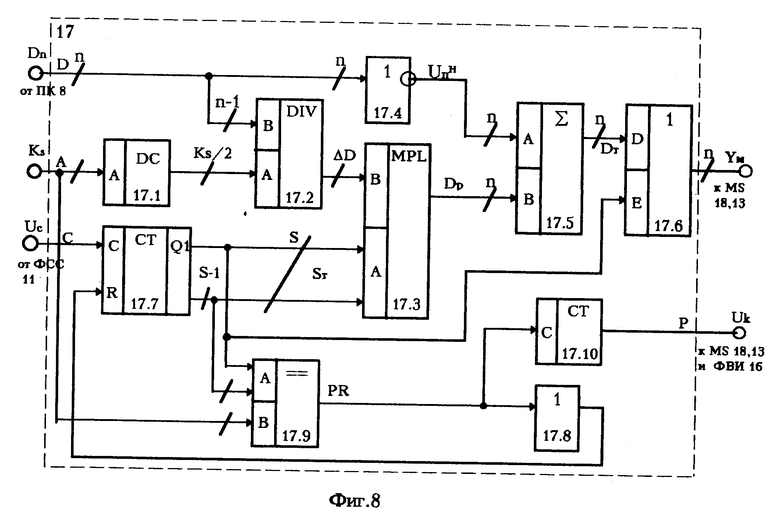
Блок-схема ФКНС 17 представлена на фиг. 8, а эпюры его сигналов на фиг. 9. ФКНС содержит дешифратор 17.1, делитель 17.2, умножитель 17.3, инвертор 17.4, сумматор 17.5, управляемый инвертор 17.6, счетчики 17.7 и 17.10, схему сравнения 17.9 и элементы задержки 17.8. Дешифратор 17.1 преобразует входные данные Ks числа строк в код Ks/2, т.е. уменьшенный в два раза, подаваемый на входную шину А делителя 17.2. На входную шину B делителя 17.2 поступает (n-1)-разрядный код данных Dn преобразователя кодов 8, величина которого численно соответствует половине кода Nd (см. таблицу), задаваемого внешним кодом Md дробного масштабирования. Делитель 17.2 вычисляет код ΔD интервалов между строками, равный Nd/Ks, величина которого численно равна интервалу между строками растра (кадра) ИП. Счетчик 17.7, переключаемый сигналами Uc (фиг. 9.1), поступающими от ФСС 11, осуществляет счет текущего номера строки, код Sт которого изменяется в диапазоне значений 0.2s. На входные шины A и B умножителя 17.3 поступают соответственно код текущего номера строки Sт счетчика 17.7 и код ΔD интервалов между строками от делителя 17.2. Умножитель 17.3 формирует код Dp ΔD • Sт, который подается на входную шину B сумматора 17.5. На вторую входную шину A сумматора 17.5 подаются инвертированные схемой 17.4 данные Dn от ПК 8, которые после инверсии равны значению U
При совпадении выходных кодов счетчика 17.7 и входных данных Ks схема сравнения 17.9 формирует сигнал высокого уровня PR (фиг. 9.7), который переключает счетчик 17.10 и через элемент задержки 17.8 устанавливает в нулевое состояние выходы счетчика 17.7. При сбросе данных счетчика 17.7 сигнал PR переключается в состояние низкого уровня. Длительность импульса PR определяется задержкой, вносимой элементами 17.8, 17.7 и 17.9. Выходной сигнал счетчика 17.20 является выходным сигналом Uк ФКНС 17 (фиг. 9.8).
В качестве акустооптического дефлектора описываемого устройства может быть использован дефлектор со светозвукопроводами из парателлурита (TeO2), обеспечивающий сканирование лазерных пучков видимого и ближнего ИК-спектров.
В качестве генератора 7 целесообразно использовать кварцевые генераторы для обеспечения стабильных временных характеристик.
В качестве умножителей кодов 14 и 15 могут быть использованы k-передатчиков, имеющие (n+k) разрядов, и выходы отключаемые в третье состояние. Выходы передатчиков соединены параллельно. На входы передатчиков подают от мультиплексоров n-разрядный код. Входы передатчиков соединены между собой параллельно со смещением на один разряд в сторону младших разрядов для каждого последующего передатчика, а незадействованные k входов передатчиков установлены, например, в состояние низкого уровня. Включение соответствующего передатчика сигналом управления можно обеспечить выходной код, уменьшенный от 1 до 2k раз относительно входного кода.
В качестве преобразователей код -частоты 15 и 20 целесообразно использовать синтезаторы частоты. Диапазон генерирующих частот синтезаторами при использовании дефлекторов из парателлурита может быть равным 60.90 МГц.
В качестве делителя частоты 9, могут быть использованы программируемые делители частоты, коэффициент деления которых и коды управления выбраны, например, в соответствии с вышеприведенной таблицей.
В качестве преобразователей кодов 8, могут быть использованы управляемые дешифраторы, выходные данные которых Dn=Kd/2 и коды управления выбраны, например, в соответствии с таблицей.
Использование новых электронных узлов и связей выгодно отличает предлагаемое устройство от прототипа, так как оно обеспечивает постоянные размеры ИП в плоскости объекта управления на всех рабочих дальностях с неравномерностью размеров ИП, не превышающей 10%
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2099730C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2080615C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С УВЕЛИЧЕННЫМ ДИАПАЗОНОМ РАБОЧИХ ДАЛЬНОСТЕЙ | 1995 |
|
RU2093848C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2267734C2 |
| ТЕРМОКОМПЕНСИРОВАННАЯ ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2243626C1 |
| СПОСОБ ЛАЗЕРНОЙ ТЕЛЕОРИЕНТАЦИИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2504906C1 |
| СПОСОБ ТЕЛЕОРИЕНТАЦИИ | 1997 |
|
RU2117311C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С КАНАЛОМ ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ (ВАРИАНТЫ) | 2009 |
|
RU2410722C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С ПОВЫШЕННОЙ ПОМЕХОУСТОЙЧИВОСТЬЮ | 1996 |
|
RU2110808C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ | 2008 |
|
RU2383896C1 |

Изобретение относится к приборостроению и предназначено для формирования информационного поля лазерных систем телеориентации и навигации, оптической связи и может быть использовано при управлении, посадке и стыковке летательных аппаратов, проводке судов через узости или створы мостов, дистанционном управлении робототехническими устройствами в опасных для человека зонах и т. д. Способ и устройство его реализующее основаны на сканировании акустооптическими дефлекторами излучения лазера с "иглообразной" диаграммой направленности по заданной траектории, причем угол сканирования дефлектора изменяется при удалении объекта управления так, чтобы линейный размер информационного поля в плоскости объекта управления оставался постоянным и не превышал заданную ошибку. 2 з.п. ф-лы, 1 табл., 10 ил.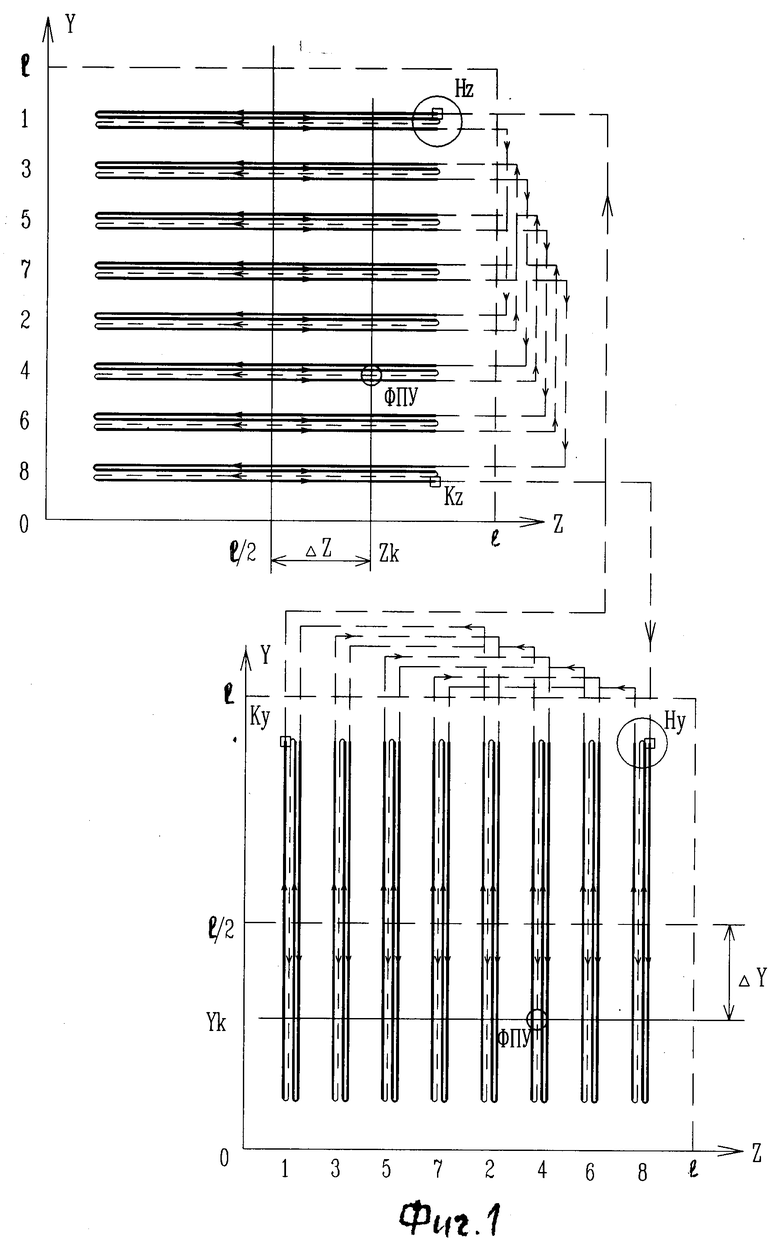
αi= l/[(1+Δ)iLmin],
где Δ = [(lmax/l)-1] - неравномерность размеров растра, задаваемая в интервале 0,01 2,0;
lm a x наибольший размер растра;
Lm i n наименьшая дальность управления;
i номер текущего интервала дискретизации дальности, задаваемый в интервале 1 1024 и выбираемый из условия
Lmin(1+Δ)i-1< Lт< Lmin(1+Δ)i,
где Lт текущая дальность до управляемого объекта,
причем сканирование по строкам в растре осуществляют дискретно с числом дискретов Ki для i-го интервала дальности, удовлетворяющим условию Ki 32 1024, а длительность формирования строки Ti в i-м интервале дальности удовлетворяет условию Ti= Tc± ΔT, где Tc расчетное время сканирования строки, а ΔT = (0-0,1)Tc.
2. Способ по п.1, отличающийся тем, что  при этом отношение R наибольшей Lm a x и наименьшей Lm i n дальностей работы системы равно R Lm i n • 2S, где S целое положительное число.
при этом отношение R наибольшей Lm a x и наименьшей Lm i n дальностей работы системы равно R Lm i n • 2S, где S целое положительное число.
| GB, патент, 1395246, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| GB, патент, 2133652, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| GB, патент, 2113939, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
