Изобретение относится к приборостроению, предназначено для формирования информационного поля лазерных систем телеориентации и навигации, оптической связи и может быть использовано для управления движущимися объектами, например управляемыми ракетами, при управлении, посадке и стыковке летательных аппаратов, проводке судов через узости или своды мостов и т.п.
Известны лазерные системы телеориентации (ЛСТ), в которых формирование лазерного растра (ЛР) управления - информационного поля (ИП) осуществляется за счет сканирования лазерного пучка акустооптическим дефлектором (патенты RU №2093849, приоритет 13.12.95 и №2093848, приоритет 28.11.95, МПК G01S 1/70). Дефлекторы в таких ЛСТ содержат две скрещенных акустооптических ячейки и управляются за счет подачи на них перестраиваемых по частоте высокочастотных сигналов. Угол отклонения лазерного пучка на выходе каждой ячейки пропорционален частоте подаваемого на ячейку высокочастотного сигнала. Формирование высокочастотных сигналов управления осуществляется в блоке управления дефлекторами, содержащем последовательно соединенные блок формирования синхросигналов и параметров растра, формирователь кодов растра и двухканальный преобразователь код-частота (двухканальный синтезатор частот).
Формирователь кодов растра вырабатывает двоичные коды, которые, после преобразования их в высокочастотные сигналы двухканальным синтезатором частот, определяют положение лазерного пучка в пространстве. Закон изменения этих кодов определяет траекторию сканирования лазерного пучка в пространстве - горизонтальные или вертикальные строки растра и тип растра - командный или информационный. По сигналам управления он также устанавливает число строк и угловые размеры растра в пространстве.
Сигналы управления формирователю кодов растра выдает блок формирования синхросигналов и параметров растра, управляемый внешними командами. Так, например, в ЛСТ управляемых изделий (патент RU №2183808, приоритет 21.12.99, МПК F41G 7/26) после подачи внешней команды "Пуск" включается лазер, а после подачи внешней команды "Сход" включается блок формирования синхросигналов и параметров растра, который вырабатывает через требуемый интервал времени Δti коды угловых размеров растра Мк, а также сигнал дальности для переключения «ближней» и «дальней» зон управления для ЛСТ, имеющих два выходных оптических канала. Интервалы времени Δti смены кодов угловых параметров растра рассчитываются таким образом, чтобы для следующего растра его линейные размеры соответствовали требуемым размерам зоны управления для текущей дальности управляемого изделия.
Поскольку управляемое изделие управляется к центру информационного растра, то центр информационного растра должен совпадать с линией визирования цели. В процессе эксплуатации дополнительно к начальной разъюстировке, обусловленной технологическими возможностями сборки ЛСТ, происходит разъюстировка центров информационных полей относительно линии визирования цели из-за механических деформаций и температурного влияния.
Так как ЛСТ, как правило, установлена в оптическом прицеле системы наведения управляемого изделия и открытого доступа для механической юстировки канала наведения и визирного канала нет, то, очевидно, для проведения поверки оптического прицела необходима установка приводов управления, например, оптическими клиньями, что увеличивает вес и габариты системы управления.
В лазерной системе телеориентации (патент RU 2177208, МПК H04B 10/10, приоритет 06.04.2000) приняты меры по уменьшению влияния температуры на взаимное угловое положение лазерных растров "ближней" и "дальней" зон управления - в каналах "ближней" и "дальней" зон управления использованы одинаковые акустооптические ячейки, имеющие одинаковую температурную зависимость угла отклонения от температуры окружающей среды.
Однако достаточно большое влияние температуры на параметры акустооптических ячеек (уход угла сканирования, в зависимости от конструкции ячейки, составляет несколько угловых секунд на градус изменения температуры), а также разное оптическое увеличение в каналах "ближней" и "дальней" зон управления, приводит при работе ЛСТ в диапазоне температур к значительным разъюстировкам каналов "ближней" и "дальней" зон и взаимной угловой разъюстировке ЛСТ и визирного канала оптического прицела системы наведения, что ухудшает точность наведения, а при больших изменениях температуры относительно номинального значения может привести к потере работоспособности системы.
Наиболее близкой к заявляемому техническому решению является лазерная система телеориентации (патент RU 2243626, МПК H04B 10/10, приоритет 14.04.2003 - прототип). В ней имеется возможность внешнего управления юстировкой и обеспечивается угловая стабильность центров лазерных растров в каналах "ближней" и "дальней" зон управления относительно линии визирования цели в диапазоне рабочих температур за счет измерения температуры акустооптических ячеек и введения в сигналы управления дефлекторами компенсационных составляющих.
Однако, помимо температуры акустооптических ячеек, на угловую стабильность центров лазерных растров влияют, хотя и в значительно меньшей степени, градиенты температуры внутри кристаллов АОЯ. Поэтому при поочередном пуске нескольких ракет ошибка наведения будет различной. Отличие может составить десяток сантиметров.
В процессе эксплуатации системы возникают вопросы проверки ее работоспособности и оценки ее параметров, например, размеров поля на разных участках. Все существующие ЛСТ требуют дополнительной съемной внешней оптической системы, устанавливаемой на прицеле, с помощью которой строится изображение формируемого лазерного растра, и контрольно поверочной аппаратуры, включающей фотоприемное устройство и дешифратор сигналов. Такая проверка весьма трудоемка и в полевых условиях не всегда может быть выполнена.
Техническим результатом изобретения является повышение точности наведения ЛСТ за счет автоматической юстировки центров лазерных растров во время пуска управляемого изделия и обеспечение контроля параметров лазерных растров в режиме технического обслуживания.
Вариант 1
Для достижения указанного технического результата в известную лазерную систему телеориентации, включающую последовательно установленные лазер, двухкоординатный акустооптический дефлектор, включающий две скрещенные анизотропные акустооптические ячейки, поляризационный блок светоделителей, образованный поляризационной призмой и оптическим отражателем, третью акустооптическую ячейку, установленную аналогично второй акустооптической ячейке, и первый телескоп, и второй телескоп, установленный на втором выходе поляризационного блока светоделителей, а также последовательно соединенные блок формирования синхросигналов и параметров растра, формирователь кодов растра, сумматор и двухканальный синтезатор частот, и двухканальный коммутатор высокочастотного сигнала, первый выход двухканального синтезатора частот соединен с первой акустооптической ячейкой, второй выход соединен с высокочастотным входом двухканального коммутатора высокочастотного сигнала, выходы которого соединены со второй и третьей акустооптическими ячейками, а вход управления соединен с выходом коммутации дальности блока формирования синхросигналов и параметров растра, введены последовательно соединенные телеобъектив, фотоприемное устройство, дешифратор сигналов и вычислитель угловых ошибок, а также призменный блок светоделителей, два входа которого соединены, соответственно, с выходом третьей акустооптической ячейки и вторым выходом поляризационного блока светоделителей, первый и второй выходы соединены, соответственно, с входами первого и второго телескопов, а третий выход соединен со входом телеобъектива, причем выходы вычислителя угловых ошибок соединены со вторыми входами сумматора, а выходы синхросигналов блока формирования синхросигналов и параметров растра и формирователя кодов растра соединены с двумя входами синхронизации вычислителя угловых ошибок.
Введение дополнительного измерительного канала, содержащего последовательно соединенные телеобъектив, фотоприемное устройство, дешифратор сигналов и вычислитель угловых ошибок, а также призменного блока светоделителя с вышеуказанными связями, позволило за счет формирования дополнительных сигналов угловой компенсации ошибок расширить температурный диапазон работы системы, уменьшить влияние числа пусков на точность наведения и за счет прямого измерения параметров растров обеспечить возможность контроля параметров лазерных растров в режиме технического обслуживания.
Вариант 2
Для достижения технического результата в известную лазерную систему телеориентации, включающую последовательно установленные лазер, двухкоординатный акустооптический дефлектор, включающий две скрещенные анизотропные акустооптические ячейки, третью акустооптическую ячейку, установленную аналогично второй акустооптической ячейке, и первый телескоп, и второй телескоп, а также последовательно соединенные блок формирования синхросигналов и параметров растра, формирователь кодов растра, сумматор и двухканальный синтезатор частот, и двухканальный коммутатор высокочастотного сигнала, первый выход двухканального синтезатора частот соединен с первой акустооптической ячейкой, второй выход соединен с высокочастотным входом двухканального коммутатора высокочастотного сигнала, выходы которого соединены со второй и третьей акустооптическими ячейками, а вход управления соединен с выходом коммутации дальности блока формирования синхросигналов и параметров растра, введены последовательно соединенные телеобъектив, фотоприемное устройство, дешифратор сигналов и вычислитель угловых ошибок, и поляризационно-призменный блок светоделителей, вход которого соединен с выходом дефлектора, первый выход соединен с входом третьей акустооптической ячейки, второй выход соединен с входом второго телескопа, а третий выход соединен с входом телеобъектива, причем выходы вычислителя угловых ошибок соединены со вторыми входами сумматора, а выходы синхросигналов блока формирования синхросигналов и параметров растра и формирователя кодов растра соединены с двумя входами синхронизации вычислителя угловых ошибок.
Введение последовательно соединенных телеобъектива, фотоприемного устройства, дешифратора сигналов и вычислителя угловых ошибок, а также поляризационно-призменного блока светоделителей с вышеуказанными связями позволило за счет формирования дополнительных сигналов угловой компенсации ошибок расширить температурный диапазон работы системы, уменьшить влияние числа пусков на точность наведения и за счет прямого измерения параметров растров обеспечить возможность контроля параметров лазерных растров в режиме технического обслуживания. Заявителю неизвестны лазерные системы телеориентации, в которых бы технический результат достигался подобным образом.
Сущность изобретения поясняется чертежами.
На Фиг.1 представлена блок-схема ЛСТ варианта 1.
На Фиг.2 представлены циклограммы для ЛСТ варианта 1:
- дискретного изменения угловых размеров текущих участков лазерного растра от времени при формировании постоянных размеров лазерного растра (а),
- изменения угловых размеров лазерного растра от времени в заявленной ЛСТ (б),
- появления команд «Пуск» (в), «Сход» (г) и сигнала переключения «ближней» и «дальней» зон управления (д).
На Фиг.3 представлены временные диаграммы выходных импульсов ФПУ при приеме горизонтальной координаты (а) и вертикальной координаты (б) положения ФПУ в лазерном растре.
На Фиг.4 представлена структурная схема дешифратора сигналов.
На Фиг.5 представлена блок-схема ЛСТ варианта 2.
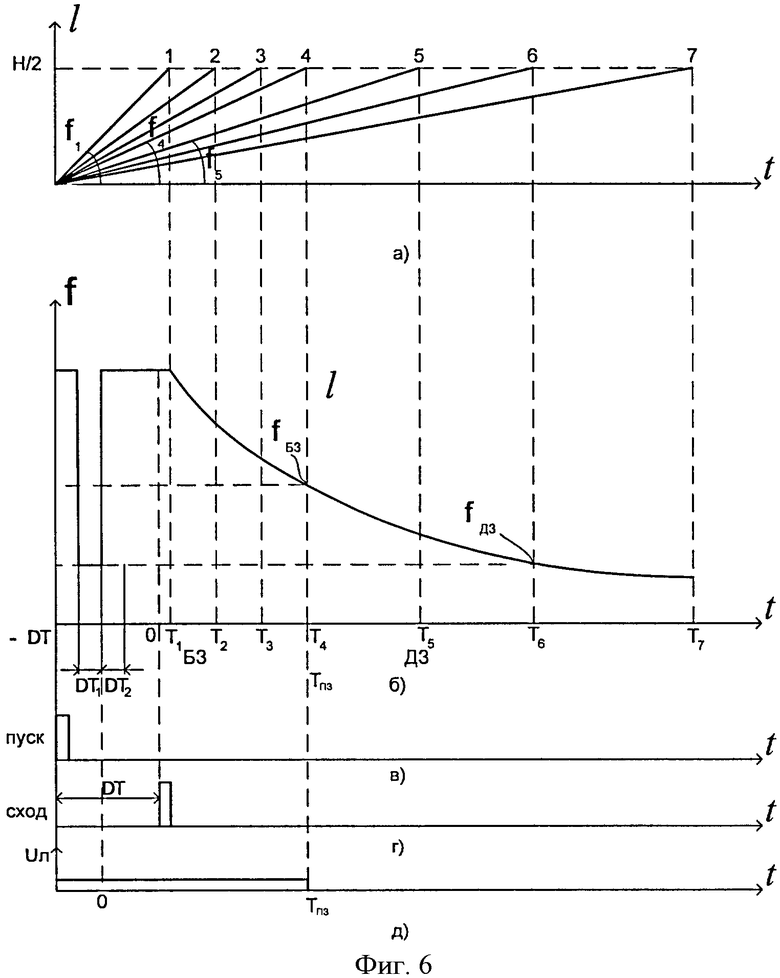
На Фиг.6 представлены циклограммы для ЛСТ варианта 2:
- дискретного изменения угловых размеров текущих участков лазерного растра от времени при формировании постоянных размеров лазерного растра (а),
- изменения угловых размеров лазерного растра от времени в заявленной ЛСТ (б),
- появления команд «Пуск» (в), «Сход» (г) и сигнала переключения «ближней» и «дальней» зон управления (д).
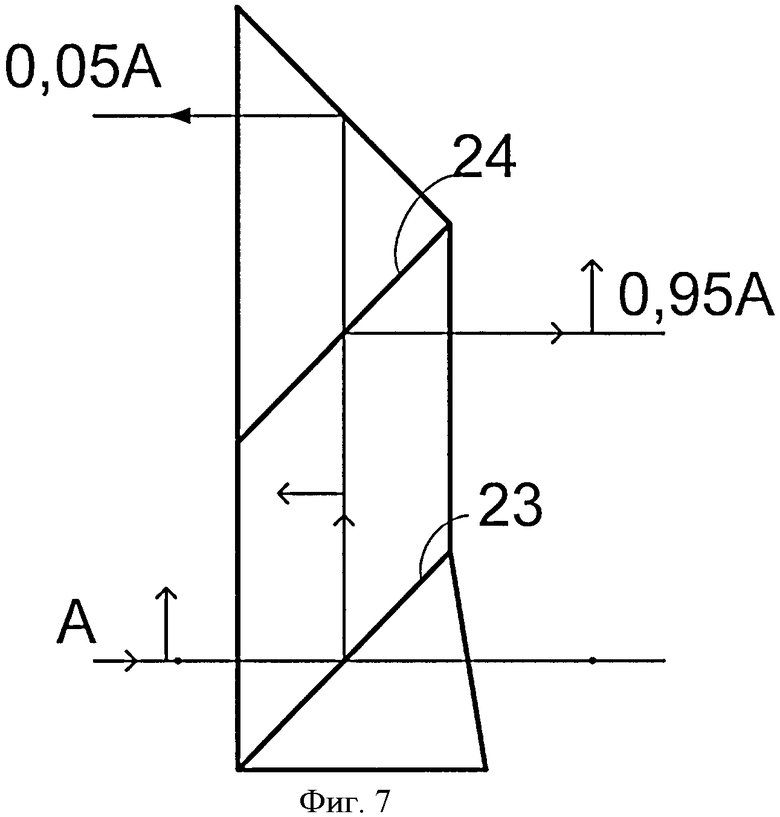
На Фиг.7 представлена упрощенная оптическая схема поляризациионно-призменного блока светоделителей.
Лазерная система телеориентации по варианту 1 содержит лазер 1 (Фиг.1), включающий лазерный излучатель 2 и коллиматор 3, двухкоординатный акустооптический дефлектор (АОД) 4, включающий две скрещенные анизотропные акустооптические ячейки (АОЯ) 5 и 6, поляризационный блок светоделителей 7, третью АОЯ 8, призменный блок светоделителей 9, первый телескоп 10 канала "ближней" зоны управления, второй телескоп 11 канала "дальней" зоны управления, телеобъектив 12, фотоприемное устройство 14, дешифратор сигналов 15, блок формирования синхросигналов и параметров растра 16, формирователь кодов растра 17, сумматор 18, двухканальный коммутатор высокочастотного сигнала 19, двухканальный синтезатор частот 20, вычислитель угловых ошибок 21. В частном случае, перед фотоприемником фотоприемного устройства 14 может быть установлена диафрагма 13.
Две анизотропные акустооптические ячейки 5 и 6 развернуты друг относительно друга на 90° и размещены между лазером 1 и поляризационным блоком светоделителей 7. Вход управления АОЯ 5 соединен с первым выходом синтезатора частот 20. Второй выход синтезатора частот 20 соединен с высокочастотным входом двухканального коммутатора высокочастотного сигнала 19. Входы управления АОЯ 6 и 8 соединены, соответственно, с первым и вторым выходами двухканального коммутатора высокочастотного сигнала 19.
Входы управления синтезатора частот 20 соединены с выходами сумматора 18. Входы сумматора 18 соединены с выходами формирователя кодов растра (ФКР) 17 и с выходами вычислителя угловых ошибок (ВУО) 21. Входы данных ВУО 21 соединены с выходной шиной дешифратора сигналов 15. Выходы синхросигналов Ет блока формирования синхросигналов и параметров растра 16 и выходы синхросигналов Ек формирователя кодов растра 17 соединены, соответственно, с двумя входами синхронизации вычислителя угловых ошибок 21. Вход дешифратора сигналов 15 соединен с выходом фотоприемного устройства (ФПУ) 14, размещенного в фокальной плоскости телеобъектива 12. На фотоприемнике ФПУ 14 с помощью телеобъектива 12 строится изображение текущего лазерного растра из сканируемого акустооптическими дефлекторами лазерного пучка, отведенного третьим выходом второго призменного блока светоделителей 9. Диафрагма 13 может использоваться для сопряжения размеров чувствительной площадки фотоприемника и лазерного пучка. Выходная шина управления БФС и ПР 16 соединена со входом ФКР 17. Выходы синхронизации БФС и ПР 16 соединены с входом управления двухканального коммутатора высокочастотного сигнала (ДКВС) 19 и соответствующими входами синхронизации ФКР 17 и ВУО 21. Входы управления БФС и ПР 16 соединены с внешней шиной управления, по которой подаются боевые команды «Пуск», «Сход», «Дальность» и технологические команды, например, «ТО» (Техническое обслуживание), «N» (Номер участка) и т.д.
Лазерный пучок излучателя 2 проходит коллиматор 3, двухкоординатный дефлектор 4 и направляется поляризационным блоком светоделителей 7 либо на АОЯ 8, либо на свой второй выход. Лазерный пучок, прошедший АОЯ 8, проходит далее призменный блок светоделителей 9 и направляется на первый телескоп 10 канала "ближней" зоны управления. Небольшая часть пучка ответвляется в призменном блоке светоделителей 9 и направляется на его третий выход и далее через телеобъектив 12 на фотоприемное устройство 14.
Лазерный пучок, прошедший на второй выход поляризационного блока светоделителей 7, проходит далее призменный блок светоделителей 9 и направляется на второй телескоп 11 канала "дальней" зоны управления. Небольшая часть этого пучка ответвляется в призменном блоке светоделителей 9 и направляется на его третий выход и далее через телеобъектив 12 на фотоприемное устройство 14.
Последовательно соединенные блок формирования синхросигналов параметров растра 16 и формирователь кодов растра 17 вырабатывают двоичные коды ZT и УТ, которые, если не учитывать влияния вновь введенных блоков, преобразуются двухканальным синтезатором частот 20 в перестраиваемые во времени высокочастотные сигналы fz и fy. Высокочастотный сигнал fz всегда подается на АОЯ 5. Высокочастотный сигнал fy подается на вход двухканального коммутатора высокочастотного сигнала 19 и далее, в зависимости от сигнала управления, он подается либо на АОЯ 6, либо на АОЯ 8.
Лазерный пучок, проходя две включенные АОЯ, отклоняется по двум координатам и далее, пройдя соответствующие оптические элементы, образует в пространстве растр, линейные размеры которого в плоскости управляемого изделия соответствуют расчетным значениям.
Лазерная система телеориентации по варианту 1 работает следующим образом.
Перед стрельбой осуществляется выверка ЛСТ в составе прицела оптическими средствами прицела (патент RU 2243626, МПК H04B 10/10, приоритет 14.04.2003). После завершения выверки центр лазерного растра «дальней» зоны совмещен с оптической осью прицела, а фотоприемник ФПУ 14 измерительного канала, в общем случае, смещен относительно центров лазерных растров, сфокусированных телеобъективом 12. При этом две пары координат положения ФПУ 14 в лазерных растрах «ближней» и «дальней» зон управления равны, соответственно, ZФПУ,БЗ В, YФПУ,БЗ В и ZФПУ,ДЗ В, YФПУ,ДЗ В. Величины этих начальных координат выверки записаны в энергонезависимой памяти ВУО 21.
При подаче на БФС и ПР 16 внешней команды - кода дальности устанавливаются начальные параметры всех блоков, в частности, время работы системы. При подаче внешней команды «Пуск» (Фиг.2в) включается лазер 1 и БФС и ПР 16 устанавливает для ФКР 17 коды управления, при которых формируется первый участок ближней зоны управления, характеризующийся наибольшими угловыми размерами φ1 (Фиг.2а).
Лазерный пучок излучателя 2, имеющий линейную поляризацию, проходит коллиматор 3, отклоняется АОЯ 5 двухкоординатного дефлектора 4 с изменением направления поляризации на ортогональное и направляется поляризационным блоком светоделителей 7 на АОЯ 8. Лазерный пучок, прошедший АОЯ 8 и отклоненный в ортогональном направлении, проходит далее призменный блок светоделителей 9 и направляется на первый телескоп 10 канала "ближней" зоны управления. Небольшая часть пучка ответвляется в призменном блоке светоделителей 9 и направляется на его третий выход и далее телеобъективом 12 фокусируется на фотоприемное устройство 14, образуя в плоскости фотоприемного устройства 14 лазерный растр. Так как размеры приемной площадки фотоприемника (или диафрагмы 13) значительно (в десятки раз) меньше размеров лазерного растра, образованного в плоскости фотоприемника, то на выходе фотоприемного устройства формируются импульсы, временная расстановка которых определяет положение приемной площадки фотоприемника (или диафрагмы 13) относительно центра растра. Это полный аналог выделения координат управляемым изделием в пространственном лазерном растре (патент RU 2099730, МПК G01S 1/70, G01F 1/11, приоритет 01.03.1996).
Дискретное изменение угловых размеров лазерного растра в пространстве, обеспечивающее постоянные размеры лазерного растра в плоскости управляемого объекта, равные Н (Фиг.2а), начинается после подачи на БФС и ПР 16 внешней команды «Сход» (Фиг.2г). На дальностях управления, полетное время на которых меньше или равно Тпз, на выходе коммутации дальности БФС и ПР 16 вырабатывает сигнал Uл=1 (Фиг.2д), управляющий двухканальным коммутатором высокочастотного сигнала 19, при этом высокочастотные сигналы fz и fy11 подаются на АОЯ 5 и 8. Лазерный пучок проходит через телескоп 10. Формируется лазерный растр "ближней" зоны. Далее, до конца работы системы, на выходе коммутации дальности БФС и ПР 16 вырабатывает сигнал Uл=0, при этом высокочастотные сигналы fz и fy1 подаются на АОЯ 5 и 6. Лазерный пучок, прошедший АОЯ 5 и 6, образует прямоугольный растр, который отражается в первом призменном блоке светоделителей на его второй выход, проходит далее второй призменный блок светоделителей 9 и направляется на второй телескоп 11 канала "дальней" зоны управления. Небольшая часть лазерного растра в обоих случаях ответвляется во втором призменном блоке светоделителей 9 и направляется на его третий выход и далее через телеобъектив 12 на фотоприемное устройство 14.
Обычно, интервал времени ΔT между подачей команд «Пуск» и «Сход» составляет около одной секунды. В предлагаемой ЛСТ, через короткий интервал времени после прохождения команды «Пуск», равный, например, 0,1-0,3 с, БФС и ПР 16 на время, равное, например, 0,2 с, вырабатывает коды управления ФКР 17, при которых формируется последний участок «ближней зоны» (на Фиг.2а - это участок 4), а затем примерно на такое же время формируется один из участков «дальней» зоны (на Фиг.2а - это участок 6). Ответвленная во втором призменном блоке светоделителей 9 на его третий выход часть лазерного растра этих двух участков телеобъективом 12 фокусируется на фотоприемное устройство 14, которое преобразует их в электрические импульсы. Выходные импульсы фотоприемного устройства 14 поступают на вход дешифратора сигналов 15 и преобразуются в цифровой код, величина и знак которого пропорциональны величине смещения центров лазерных растров относительно чувствительной площадки фотоприемного устройства (или установленной диафрагмы). За время формирования каждого из участков, равное, например, 0,2 с, при частоте обновления информации о координатах, равной, например, 50 Гц, произойдет 10 измерений каждой координаты на каждом участке, что достаточно для получения достоверной информации о координатах. Таким образом, на выходе дешифратора 15 вычисляются две пары координат ZФПУ,БЗ, УФПУ,БЗ и ZФПУ,ДЗ, ZФПУ,ДЗ, соответственно, при формировании последнего участка «ближней зоны» и одного из участков «дальней» зоны.
Далее коды измеренных координат поступают в вычислитель угловых ошибок 21, где вычитаются с ранее записанными кодами выверок ZФПУ,БЗ В, УФПУ,БЗ В и ZФПУ,ДЗ В, ZФПУ,ДЗ В и с учетом весовых коэффициентов КБЗ и КДЗ, определяемых номерами выбранных участков ФКР 17, преобразуются в коды угловых ошибок «ближней» ZБЗ, УБЗ и «дальней» ZДЗ, УДЗ зон управления. Эти коды угловых ошибок сохраняются в памяти ВУО 21 на время формирования данного цикла управления и суммируются сумматором 18 с текущими кодами ZТ и УТ ФКР 17 при формировании всех участков после прихода команды «Сход». Синхросигналы Ет БФС и ПР 16 и синхросигналы Ек ФКР 17, поступающие на входы синхронизации вычислителя угловых ошибок 21, обеспечивают результаты вычислений с учетом текущего номера участка.
После завершения этих двух установок БФС и ПР 16 устанавливает на своих выходах коды управления для ФКР 17, при которых формируется первый участок ближней зоны управления. После прихода команды «Сход» начинается изменение угловых размеров лазерного растра в пространстве (Фиг.2а), обеспечивающее заданные размеры лазерного растра в плоскости управляемого объекта. Условно, расчетное изменение половинного угла сканирования лазерного пучка во времени на выходе предлагаемой ЛСТ представлено на Фиг.2б.
При появлении угловых ошибок «ближней» ZБЗ, УБЗ и «дальней» ZДЗ, УДЗ зон управления измерительного канала, связанных с недостаточной точностью термокомпенсации в диапазоне рабочих температур, неучтенными градиентами температуры в АОЯ при повторных пусках и т.д., эти ошибки суммируются с соответствующим знаком с текущими кодами ZT и УТ ФКР 17, устраняя тем самым их влияние на точность наведения управляемых изделий.
Таким образом, при совместной работе ФКР 17 и ВУО 21 на выходных шинах сумматора 18 формируется группа сигналов
Zc=Zт+КБЗ,ДЗ×(ZФПУ,Б3,ДЗ В - zФПУ,Б3,ДЗ)=Zт+ZБЗ,ДЗ;
Ус=Ут+КБЗ,ДЗ×(УФПУ,БЗ,ДЗ В - УФПУ,БЗ,ДЗ)=Ут+УБЗ,ДЗ.
Возможность контроля параметров лазерных растров в режиме технического обслуживания в предлагаемой ЛСТ по варианту 2 обеспечивается следующим образом. При подаче по внешней шине управления технологических команд «ТО» (Техническое обслуживание), «N» (Номер участка) на БФС и ПР 16 и команды «Смещение» включается лазер, а БФС и ПР 16 устанавливает для ФКР 17 коды управления, при которых формируется N-й участок зоны управления, смещенный, например, по вертикали на четверть размера лазерного растра. При этом лазерный растр этого участка, сфокусированный телеобъективом 12 на фотоприемное устройство 14, будет также смещен на четверть размера по вертикали и вычислитель угловых ошибок 21 вычислит координату по вертикали, равную В. Далее вычислитель угловых ошибок 21 сравнивает данные измерений с ожидаемыми результатами, и если B=H/4±ΔH, где H - размер лазерного растра, а ΔH - погрешность измерений, то принимается решение о работоспособности ЛСТ. Если данные измерений не совпадают с ожидаемыми результатами, то принимается решение о неработоспособности системы. Такое тестирование может быть проведено для одного участка «ближней» зоны управления и для одного участка «дальней» зоны управления, что достаточно для принятия решения о работоспособности ЛСТ.
Формирование лазерного растра может быть основанным на совершении возвратно-поступательного сканирования, с числом тактов сканирования по строке, равным трем. Вначале по одной координате с дискретным переходом по ортогональной координате после завершения каждого возвратно-поступательного движения лазерного пучка, а затем после заполнения лазерным излучением прямоугольного растра направление сканирования меняется на ортогональное (патент RU 2099730, МПК G01S 1/70, G01F 1/11, приоритет 01.03.1996). При облучении ФПУ управляемого объекта, а также ФПУ 14 предлагаемой ЛСТ на выходе ФПУ формируются три импульса (Фиг.3). Временной интервал Ти между первыми двумя импульсами определяет величину координаты ФПУ в лазерном растре, а временной интервал Tпz и Тпу между вторым и третьим импульсами определяет признак координаты - горизонтальной или вертикальной. Местоположение ФПУ относительно центра лазерного растра может быть вычислено по формуле:
Zк, Yк=0,5H(Ти/Тс-То/Тс-1),
где H - линейный размер лазерного растра,
Тс - время сканирования по строке,
То - время задержки между первым и вторым тактами строки при формировании лазерного растра. Эти величины могут принимать значения, например, Тс=100 мкс, То=20 мкс.
Эта формула является основой для создания дешифратора 15.
Структурная схема дешифратора 15 приведена на Фиг.4. Он состоит из цифрового фильтра (ЦФ) 15.1, определителя длительности интервалов (ОДИ) 15.2, определителя признака координаты (ОПК) 15.3, вычислителя горизонтальной координаты (ВГК) 15.4 и вертикальной координаты (ВВК) 15.5. На вход дешифратора поступают тройки импульсов с выхода ФПУ 14. Во входном цифровом фильтре 15.1 отсекаются импульсы, длительность которых меньше заданной величины, например, 1 мкс. В ОДИ 15.2 происходит измерение и анализ длительности временного интервала между передними фронтами первого и второго импульсов входной последовательности. Если этот интервал находится в заданных пределах (для вышеуказанных величин он равен 20-220 мкс), то происходит запись значения длительности Тд (8…0) в регистр памяти ОДИ 15.2 и ОПК начинает измерение и анализ длительности временного интервала между передними фронтами второго и третьего импульсов. Если этот интервал находится в заданных пределах, например, 120±5 мкс и 140±5 мкс, то принимается решение о приеме, соответственно, горизонтальной или вертикальной координаты и данные Тд (9…0) из регистра памяти ОДИ 15.2 переписываются в память ВГК 15.4 или ВВК 15.5. Таким образом, величины координат ФПУ в лазерном растре заданы, например, девятизначным двоичным кодом и могут принимать значения от -256 до +256.
В качестве ФПУ 14 может быть использовано фотоприемное устройство, реализованное по патенту RU №2296303, приоритет от 07.11.2005.
В качестве телеобъектива 12 целесообразно использовать телеобъектив с фокусным расстоянием 1000-1500 мм.
Поляризационй блок светоделителей 7 состоит, как в прототипе, из поляризационной призмы и оптического отражателя, выполненного, например, в виде призмы АР-90. Поляризационную призму и призму АР-90 целесообразно выполнить в виде единого блока.
Призменный блок светоделителей 9, оптическая схема которого ясна из Фиг.1, содержит два внутренних отражающих покрытия с коэффициентом отражения 1-2%.
ВУО 21 является, по сути дела, умножителем кодов координат ZФПУ,БЗ, УФПУ,БЗ или ZФПУ,ДЗ, ZФПУ,ДЗ, вычисленных дешифратором 15, соответственно, при формировании последнего участка «ближней зоны» и одного из участков «дальней» зоны и весовых коэффициентов КБЗ и КДЗ, определяемых номерами выбранных участков. Весовые коэффициенты КБЗ и КДЗ могут быть определены из выражений:
KБЗ=(N φБЗ)/(256 ГБЗφД),
КДЗ=(N φДЗ)/(256 ГДЗφД),
где N - число кодов управления АОД;
φБЗ - угловой полуразмер последнего участка ближней зоны (Фиг.2б);
φДЗ - угловой полуразмер выбранного участка дальней зоны (Фиг.2б);
φД - максимальный угол сканирования АОД;
ГБЗ и ГДЗ - соответственно увеличение телескопов 10 и 11.
В качестве АОЯ дефлектора предложенного устройства может быть использован, например, АОЯ со светозвукопроводом из оптически активного анизотропного кристалла - парателлурита (TeO2), обеспечивающего сканирование лазерных пучков видимого и ближнего ИК-спектров и имеющего световую апертуру до 10…15 мм. Такие дефлекторы могут иметь полный угол сканирования, равный 3 градусам, при полосе частот управления, равной 32 МГц. Если синтезатор частот имеет 12-разрядный код управления в каждом канале, т.е. 4096 дискрета управления, то, очевидно, вес отсчета частоты на один дискрет управления равен Δf=32000/4096=7,80 кГц.
Блок формирования синхросигналов и параметров растра 16, формирователь кодов растра 17, сумматор 18 и вычислитель угловых ошибок 21 могут быть реализованы на основе ряда микроконтроллеров, например, Т89С51АС2 фирмы ATMEL, содержащих энергонезависимую память, порты управления и временные таймеры.
Таким образом, введение в известную ЛСТ по варианту 1 дополнительного измерительного канала, содержащего последовательно соединенные телеобъектив, фотоприемное устройство, дешифратор сигналов и вычислитель угловых ошибок, а также призменного блока светоделителей с вышеуказанными связями, позволило за счет формирования дополнительных сигналов угловой компенсации ошибок расширить температурный диапазон работы системы, уменьшить влияние числа пусков на точность наведения и за счет прямого измерения параметров растров обеспечить возможность контроля параметров лазерных растров в режиме технического обслуживания.
Лазерная система телеориентации по варианту 2 содержит лазер 1 (Фиг.5), включающий лазерный излучатель 2 и коллиматор 3, двухкоординатный акустооптический дефлектор (АОД) 4, включающий две скрещенные анизотропные акустооптические ячейки (АОЯ) 5 и 6, третью АОЯ 8, поляризационно-призменный блок светоделителей 22, первый телескоп 10 канала "ближней" зоны управления, второй телескоп 11 канала "дальней" зоны, телеобъектив 12, фотоприемное устройство 14, дешифратор сигналов 15, блок формирования синхросигналов и параметров растра 16, формирователь кодов растра 17, сумматор 18, двухканальный синтезатор частот 20, двухканальный коммутатор высокочастотного сигнала 19 и вычислитель угловых ошибок 21.
Две анизотропные акустооптические ячейки 5 и 6 развернуты друг относительно друга на 90° и размещены между лазером 1 и призменным блоком светоделителей 7. Вход управления АОЯ 5 соединен с первым выходом синтезатора частот 20. Второй выход синтезатора частот 20 соединен с высокочастотным входом двухканального коммутатора высокочастотного сигнала 19. Входы управления АОЯ 6 и 8 соединены, соответственно, с первым и вторым выходами двухканального коммутатора высокочастотного сигнала 19.
Входы управления синтезатора частот 20 соединены с выходами сумматора 18. Входы сумматора 18 соединены с выходами формирователя кодов растра (ФКР) 17 и с выходами вычислителя угловых ошибок (ВУО) 21. Входы данных ВУО 21 соединены с выходной шиной дешифратора сигналов 15. Выходы синхросигналов Ет блока формирования синхросигналов и параметров растра 16 и выходы синхросигналов Ек формирователя кодов растра 17 соединены, соответственно, с двумя входами синхронизации вычислителя угловых ошибок 21.
Вход дешифратора сигналов 15 соединен с выходом фотоприемного устройства (ФПУ) 14, размещенного в фокальной плоскости телеобъектива 12. На фотоприемнике ФПУ 14 с помощью телеобъектива 12 строится изображение текущего лазерного растра из сканируемого акустооптическими дефлекторами лазерного пучка, отведенного третьим выходом поляризационно-призменного блока светоделителей 22. Диафрагма 13 может использоваться для сопряжения размеров чувствительной площадки фотоприемника и лазерного пучка. Выходная шина управления БФС и ПР 16 соединена со входом ФКР 17. Выходы синхронизации БФС и ПР 16 соединены с входом управления двухканального коммутатора высокочастотного сигнала (ДКВС) 19 и соответствующими входами синхронизации ФКР 17 и ВУО 21. Входы управления БФС и ПР 16 соединены с внешней шиной управления, по которой подаются боевые команды «Пуск», «Сход», «Дальность» и технологические команды, например, «ТО» (Техническое обслуживание), «N» (Номер участка) и т.д.
Лазерный пучок излучателя 2 проходит коллиматор 3, двухкоординатный дефлектор 4 и направляется поляризационно-призменным блоком светоделителей 22 либо на АОЯ 8 и далее на первый телескоп 10 канала "ближней" зоны управления, либо на второй телескоп 11 канала "дальней" зоны, причем малая часть лазерного пучка направляется поляризационно-призменным блоком светоделителей 22 через телеобъектив 12 на фотоприемное устройство 14.
Последовательно соединенные блок формирования синхросигналов параметров растра 16 и формирователь кодов растра 17 вырабатывают двоичные коды ZТ и УТ, которые, если не учитывать влияния вновь введенных блоков, преобразуются двухканальным синтезатором частот 20 в перестраиваемые во времени высокочастотные сигналы fz и fy, подаваемые на АОЯ 5 и 6. Лазерный пучок, проходя АОЯ, отклоняется по двум координатам, образуя в пространстве растр, линейные размеры которого в плоскости управляемого снаряда соответствуют расчетным значениям.
Лазерная система телеориентации по варианту 2 работает следующим образом.
Перед стрельбой осуществляется выверка ЛСТ в составе прицела оптическими средствами прицела (патент RU 2243626, МПК H04B 10/10, приоритет 14.04.2003). После завершения выверки центр лазерного растра «дальней» зоны совмещен с оптической осью прицела, а фотоприемник ФПУ 14 измерительного канала, в общем случае, смещен относительно центров лазерных растров, сфокусированных телеобъективом 12. При этом пара координат положения ФПУ 14 в лазерном растре и «дальней» зоне управления равна ZФПУ,ДЗ B и УФПУ,ДЗ В. Величины этих начальных координат выверки записаны в энергонезависимой памяти ВУО 21.
При подаче на БФС и ПР 16 внешней команды - кода дальности устанавливаются начальные параметры всех блоков, в частности, время работы системы. При подаче внешней команды «Пуск» (Фиг.6в) включается лазер 1 и БФС и ПР 16 устанавливает для ФКР 17 коды управления, при которых формируется первый участок ближней зоны управления, характеризующийся наибольшими угловыми размерами φ1 (Фиг.6а).
Лазерный пучок излучателя 2, имеющий линейную поляризацию, проходит коллиматор 3, отклоняется АОЯ 4 двухкоординатного дефлектора 4 с изменением направления поляризации на ортогональное и направляется поляризационно-призменным блоком светоделителей 22 на АОЯ 8. Лазерный пучок, прошедший АОЯ 8 и отклоненный в ортогональном направлении, направляется на первый телескоп 10 канала "ближней" зоны управления.
Дискретное изменение угловых размеров лазерного растра в пространстве, обеспечивающее постоянные размеры лазерного растра в плоскости управляемого объекта, равные H (Фиг.6а), начинается после подачи на БФС и ПР 16 внешней команды «Сход» (Фиг.6г). На дальностях управления, полетное время на которых меньше или равно Тпз, на выходе коммутации дальности БФС и ПР 16 вырабатывает сигнал Uл=1 (Фиг.6д), управляющий двухканальным коммутатором высокочастотного сигнала 19, при этом высокочастотные сигналы fz и fy11 подаются на АОЯ 5 и 8. Лазерный пучок проходит через телескоп 10. Формируется лазерный растр "ближней" зоны. Далее, до конца работы системы, на выходе коммутации дальности БФС и ПР 16 вырабатывает сигнал Uл=0, при этом высокочастотные сигналы fz и fy1 подаются на АОЯ 5 и 6. Лазерный пучок, прошедший АОЯ 5 и 6, образует прямоугольный растр, который отражается в поляризационно-призменном блоке светоделителей 22 на его второй выход и направляется на второй телескоп 11 канала "дальней" зоны управления. Небольшая часть лазерного растра поляризационно-призменным блоком светоделителей 22 направляется на его третий выход и далее через телеобъектив 12 на фотоприемное устройство 14.
Обычно интервал времени ΔT между подачей команд «Пуск» и «Сход» составляет около одной секунды. В предлагаемой ЛСТ через короткий интервал времени после прохождения команды «Пуск», равный, например, 0,1-0,3 с, БФС и ПР 16 на время ΔT1, равное, например, 0,2 с, вырабатывает коды управления ФКР 17, при которых формируется один из участков «дальней» зоны (на Фиг.6а - это участок 6). Ответвленная в поляризационно-призменном блоке светоделителей 22 на его третий выход часть лазерного растра участка «дальней» зоны телеобъективом 12 фокусируется на фотоприемное устройство 14, которое преобразует их в электрические импульсы. Выходные импульсы фотоприемного устройства 14 поступают на вход дешифратора сигналов 15 и преобразуются в цифровой код, величина и знак которого пропорциональны величине смещения центра лазерного растра «дальней» зоны относительно чувствительной площадки фотоприемного устройства (или установленной диафрагмы). За время формирования участка «дальней» зоны, равное, например, 0,2 с, при частоте обновления информации о координатах, равной, например, 50 Гц, произойдет 10 измерений каждой координаты на каждом участке, что достаточно для получения достоверной информации о координатах. Таким образом, на выходе дешифратора 15 вычисляется пара координат ZФПУ,ДЗ и УФПУ,ДЗ, при формировании одного из участков «дальней» зоны.
Далее коды измеренных координат поступают в вычислитель угловых ошибок 21, где вычитаются с ранее записанными кодами выверок ZФПУ,ДЗ В, УФПУ,ДЗ В и с учетом весового коэффициента КДЗ, определяемого номером выбранного участка ФКР 17, преобразуются в коды угловых ошибок ZДЗ и УДЗ «дальней» зоны управления. Эти коды угловых ошибок сохраняются в памяти ВУО 21 на время формирования данного цикла управления и суммируются сумматором 18 с текущими кодами ZT и УТ ФКР 17 при формировании участков «дальней» зоны управления.
После завершения этой установки БФС и ПР 16 устанавливает на своих выходах коды управления для ФКР 17, при которых формируется первый участок ближней зоны управления. После прихода команды «Сход» начинается изменение угловых размеров лазерного растра в пространстве (Фиг.6а), обеспечивающее заданные размеры лазерного растра в плоскости управляемого объекта. Условно, расчетное изменение половинного угла сканирования лазерного пучка во времени на выходе предлагаемой ЛСТ представлено на Фиг.6б.
При появлении угловых ошибок ZДЗ и УДЗ «дальней» зоны управления измерительного канала, связанных с недостаточной точностью термокомпенсации в диапазоне рабочих температур, неучтенными градиентами температуры в АОЯ при повторных пусках и т.д., эти ошибки суммируются с соответствующим знаком с текущими кодами ZТ и УТ ФКР 16, устраняя тем самым их влияние на точность наведения управляемых изделий.
Таким образом, при совместной работе ФКР 17 и ВУО 21 на выходных шинах сумматора 18 формируется группа сигналов
Zc=Zт+КДЗ×(ZФПУ,ДЗ В - zФПУ,ДЗ)=Zт+ZДЗ,
Ус=Ут+КДЗ×(УФПУ.ДЗ В-УФПУ.ДЗ)=Ут+УДЗ.
Синхросигналы Ет БФС и ПР 16 и синхросигналы Ек ФКР 17, поступающие на входы синхронизации вычислителя угловых ошибок 21, обеспечивают результаты вычислений с учетом текущего номера участка.
Возможность контроля параметров лазерных растров в режиме технического обслуживания в предлагаемой ЛСТ по варианту 2 обеспечивается следующим образом. При подаче по внешней шине управления технологических команд «ТО» (Техническое обслуживание), «N» (Номер участка) на БФС и ПР 16 и команды «Смещение» включается лазер, а БФС и ПР 16 устанавливает для ФКР 17 коды управления, при которых формируется N-й участок «дальней» зоны управления, смещенный, например, по вертикали на четверть размера лазерного растра. При этом лазерный растр этого участка, сфокусированный телеобъективом 12 на фотоприемное устройство 14, будет также смещен на четверть размера по вертикали и вычислитель угловых ошибок 21 вычислит координату по вертикали, равную B. Далее вычислитель сравнивает данные измерений с ожидаемыми результатами, и если B=H/4±ΔH, где H - размер лазерного растра, а ΔН - погрешность измерений, то принимается решение о работоспособности ЛСТ. Если данные измерений не совпадают с ожидаемыми результатами, то принимается решение о неработоспособности системы. Такое тестирование может быть проведено для одного участка «дальней» зоны управления, что достаточно для принятия решения о работоспособности ЛСТ.
Формирование лазерного растра может быть основанным на совершении возвратно-поступательного сканирования, с числом тактов сканирования по строке, равным трем. При этом вначале по одной координате с дискретным переходом по ортогональной координате после завершения каждого возвратно-поступательного движения лазерного пучка, а затем после заполнения лазерным излучением прямоугольного растра направление сканирования меняется на ортогональное (Патент RU 2099730, приоритет 01.03.1996, МПК G01S 1/70, G01F 1/11). При облучении ФПУ управляемого объекта, а также ФПУ 14 предлагаемой ЛСТ варианта 2, на выходе ФПУ формируются три импульса (Фиг.3). Временной интервал Ти между первыми двумя импульсами определяет величину координаты ФПУ в лазерном растре, а временной интервал Tпz и Тпу между вторым и третьим импульсами определяет признак координаты - горизонтальной или вертикальной. Местоположение ФПУ относительно центра лазерного растра может быть вычислено по формуле:
Zк,Yк=0,5H(Ти/Тс-То/Тс-1),
где H - линейный размер лазерного растра,
Тс - время сканирования по строке,
То - время задержки между первым и вторым тактами строки при формирования лазерного растра. Эти величины могут принимать значения, например, Тс=100 мкс, То=20 мкс.
Эта формула является основой для создания дешифратора 15.
Структурная схема дешифратора 15 приведена на Фиг.4. Он состоит из цифрового фильтра (ЦФ) 15.1, определителя длительности интервалов (ОДИ) 15.2, определителя признака координаты (ОПК) 15.3, вычислителя горизонтальной координаты (ВГК) 15.4 и вертикальной координаты (ВВК) 15.5. На вход дешифратора поступают тройки импульсов с выхода ФПУ 14. Во входном цифровом фильтре 15.1 отсекаются импульсы, длительность которых меньше заданной величины, например, 1 мкс. В ОДИ 15.2 происходит измерение и анализ длительности временного интервала между передними фронтами первого и второго импульсов входной последовательности. Если этот интервал находится в заданных пределах (для вышеуказанных величин он равен 20-220 мкс), то происходит запись значения длительности Тд (8…0) в регистр памяти ОДИ 15.2 и ОПК 15.3 начинает измерение и анализ длительности временного интервала между передними фронтами второго и третьего импульсов. Если этот интервал находится в заданных пределах, например, 120±5 мкс и 140±5 мкс, то принимается решение о приеме, соответственно, горизонтальной или вертикальной координаты и данные Тд (9…0) из регистра памяти ОДИ 15.2 переписываются в память ВГК 15.4 или ВВК 15.5. Таким образом, величины координат ФПУ в лазерном растре заданы, например, девятизначным двоичным кодом и могут принимать значения от -256 до +256.
В качестве ФПУ 14 может быть использовано фотоприемное устройство, реализованное но патенту RU №2296303, приоритет от 07.11.2005.
В качестве телеобъектива 12 целесообразно использовать телеобъектив с фокусным расстоянием 1000-1500 мм.
Поляризационно-призменный блок светоделителей 22, оптическая схема которого условно представлена на Фиг.7, содержит поляризационное покрытие 23, пропускающее лазерное излучение с одной линейной поляризацией и отражающее лазерное излучение с ортогональной линейной поляризацией, и внутреннее отражающее покрытие 24 с коэффициентом отражения 1-2%.
ВУО 21 является, по сути дела, умножителем кодов координат ZФПУ,ДЗ, УФПУ,ДЗ, вычисленных дешифратором 15 при формировании одного из участков «дальней» зоны и весового коэффициента КДЗ, определяемого номером выбранного участка. Весовой коэффициент Кдз может быть определен из выражения: Кдз=(N φдз)/(256 Гдз φД), где N - число кодов управления АОД; φдз - угловой полуразмер выбранного участка дальней зоны (Фиг.6б); φД - максимальный угол сканирования АОД; ГДЗ - увеличение телескопа 10.
В качестве АОЯ дефлектора предложенного устройства может быть использован, например, АОЯ со светозвукопроводом из оптически активного анизотропного кристалла - парателлурита (TeO2), обеспечивающего сканирование лазерных пучков видимого и ближнего ИК-спектров и имеющего световую апертуру до 10……15 мм. Такие дефлекторы могут иметь полный угол сканирования, равный 3 градусам при полосе частот управления, равной 32 МГц. Если синтезатор частот имеет 12-разрядный код управления в каждом канале, т.е. 4096 дискрета управления, то, очевидно, вес отсчета частоты на один дискрет управления равен Δf=32000/4096=7,80 кГц.
Блок формирования синхросигналов и параметров растра 16, формирователь кодов растра 17, сумматор 18 и вычислитель угловых ошибок 21 могут быть реализованы на основе ряда микроконтроллеров, например, Т89С51АС2 фирмы ATMEL, содержащих энергонезависимую память, порты управления и временные таймеры.
Таким образом, введение в известную ЛСТ по варианту 2 дополнительного измерительного канала, содержащего последовательно соединенные телеобъектив, фотоприемное устройство, дешифратор сигналов и вычислитель угловых ошибок, а также призменного блока светоделителя с вышеуказанными связями, позволило за счет формирования дополнительных сигналов угловой компенсации ошибок расширить температурный диапазон работы системы, уменьшить влияние числа пусков на точность наведения и за счет прямого измерения параметров растров обеспечить возможность контроля параметров лазерных растров в режиме технического обслуживания.
ЛСТ по варианту 2 предпочтительно использовать при создании систем телеориентации с уменьшенными габаритно-весовыми характеристиками.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2267734C2 |
| ТЕРМОКОМПЕНСИРОВАННАЯ ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2243626C1 |
| СПОСОБ ЛАЗЕРНОЙ ТЕЛЕОРИЕНТАЦИИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2504906C1 |
| КОМБИНИРОВАННЫЙ ОПТИКО-ЭЛЕКТРОННЫЙ ПРИБОР | 2011 |
|
RU2497062C2 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2080615C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С ПОВЫШЕННОЙ ПОМЕХОУСТОЙЧИВОСТЬЮ | 1996 |
|
RU2110808C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2000 |
|
RU2177208C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С УВЕЛИЧЕННЫМ ДИАПАЗОНОМ РАБОЧИХ ДАЛЬНОСТЕЙ | 1995 |
|
RU2093848C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ И НАВЕДЕНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ | 2009 |
|
RU2413159C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2099730C1 |

Изобретение относится к приборостроению, предназначено для формирования информационного поля лазерных систем телеориентации. Заявленное изобретение обеспечивает повышение точности наведения лазерной системы телеориентации. Указанное обеспечивается за счета наличия в заявленном устройстве обратной оптической связи, состоящей из телеобъектива, фотоприемного устройства, дешифратора сигнала и вычислителя угловых ошибок. Сигнал, полученный от вычислителя угловых ошибок, используется для автоматической юстировки центров лазерных растров во время пуска управляемого изделия и обеспечения контроля параметров лазерных растров в режиме технического обслуживания. 2 н. и 2 з.п. ф-лы, 7 ил.
1. Лазерная система телеориентации с каналом оптической обратной связи, включающая последовательно установленные лазер, двухкоординатный акустооптический дефлектор, включающий две скрещенные анизотропные акустооптические ячейки, первый призменный блок светоделителей, образованный поляризационной призмой и оптическим отражателем, третью акустооптическую ячейку, установленную аналогично второй акустооптической ячейке, и первый телескоп, и второй телескоп, установленный на втором выходе первого призменного блока светоделителей, а также последовательно соединенные блок формирования синхросигналов и параметров растра, формирователь кодов растра, сумматор и двухканальный синтезатор частот и двухканальный коммутатор высокочастотного сигнала, первый выход двухканального синтезатора частот соединен с первой акустооптической ячейкой, второй выход соединен с высокочастотным входом двухканального коммутатора высокочастотного сигнала, выходы которого соединены со второй и третьей акустооптическими ячейками, а вход управления соединен с выходом коммутации дальности блока формирования синхросигналов и параметров растра, отличающаяся тем, что в нее введены последовательно соединенные телеобъектив, фотоприемное устройство, дешифратор сигналов и вычислитель угловых ошибок, а также второй призменный блок светоделителей, два входа которого соединены соответственно с выходом третьей акустооптической ячейки и вторым выходом первого призменного блока светоделителей, первый и второй выходы соединены соответственно с входами первого и второго телескопов, а третий выход соединен со входом телеобъектива, причем выходы вычислителя угловых ошибок соединены со вторыми входами сумматора, а выходы синхросигналов блока формирования синхросигналов и параметров растра и формирователя кодов растра соединены с двумя входами синхронизации вычислителя угловых ошибок.
2. Лазерная система телеориентации по п.1, отличающаяся тем, что дополнительно содержит диафрагму, установленную между фотоприемником и телеобъективом.
3. Лазерная система телеориентации с каналом оптической обратной связи, включающая последовательно установленные лазер, двухкоординатный акустооптический дефлектор, включающий две скрещенные анизотропные акустооптические ячейки, третью акустооптическую ячейку, установленную аналогично второй акустооптической ячейке, и первый телескоп, и второй телескоп, а также последовательно соединенные блок формирования синхросигналов и параметров растра, формирователь кодов растра, сумматор и двухканальный синтезатор частот и двухканальный коммутатор высокочастотного сигнала, первый выход двухканального синтезатора частот соединен с первой акустооптической ячейкой, второй выход соединен с высокочастотным входом двухканального коммутатора высокочастотного сигнала, выходы которого соединены со второй и третьей акустооптическими ячейками, а вход управления соединен с выходом коммутации дальности блока формирования синхросигналов и параметров растра, отличающаяся тем, что в нее введены последовательно соединенные телеобъектив, фотоприемное устройство, дешифратор сигналов и вычислитель угловых ошибок, и поляризационно-призменный блок светоделителей, вход которого соединен с выходом дефлектора, первый выход соединен со входом третьей акустооптической ячейки, второй выход соединен со входом второго телескопа, а третий выход соединен со входом телеобъектива, причем выходы вычислителя угловых ошибок соединены со вторыми входами сумматора, а выходы синхросигналов блока формирования синхросигналов и параметров растра и формирователя кодов растра соединены с двумя входами синхронизации вычислителя угловых ошибок.
4. Лазерная система телеориентации по п.3, отличающаяся тем, что дополнительно содержит диафрагму, установленную между фотоприемником и телеобъективом.
| ТЕРМОКОМПЕНСИРОВАННАЯ ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2243626C1 |
| СПОСОБ ТЕЛЕОРИЕНТАЦИИ | 1997 |
|
RU2117311C1 |
| US 5574479 A, 12.11.1996 | |||
| Уборочная машина | 1986 |
|
SU1449050A1 |

