Изобретение относится к авиации и может быть использовано при управлении скоростью ведомого летательного аппарата (ЛА) с турбореактивными двигателями (ТРД).
Известен статический регулятор, используемый для автоматического регулирования скорости полета. В качестве чувствительных элементов в этих регуляторах обычно применяют аэрометрические измерители скорости полета, а сигналы ускорений получают с помощью акселерометров или дифференцирующих устройств [1]
Недостатком данного устройства является значительная погрешность определения воздушной скорости. Так, например, на скорости V 550 570 км/ч ошибка измерения составляет не менее 1,5% что неприемлемо при групповых полетах.
В настоящее время в авиации широко применяется регулятор частоты вращения ротора турбореактивного двигателя, состоящий из механических центробежных грузиков, пружины, маятника, прикрывающего сопло, жиклера постоянного сечения, поршня, дозирующего крана, кулачка, рычага и толкателя [2]
Недостатком данного устройства является сложность управления двигателем при выдерживании расстояния между ЛА при групповом полете и в режиме дозаправки в воздухе.
Задачей изобретения является повышение точности выдерживания расстояния между ЛА при групповом полете и в режиме дозаправки в воздухе.
Указанная задача решается тем, что в регуляторе частоты вращения ротора турбореактивного двигателя с корректором по скорости полета самолета, содержащем механические центробежные группки, пружину, маятник, прикрывающий сопло, поршень, дозирующий кран, профилированный кулачок, рычаг и толкатель, в канал прохождения сигнала от рычага управления двигателем к профилированному кулачку подключена рулевая машина, связанная с бортовым компьютером.
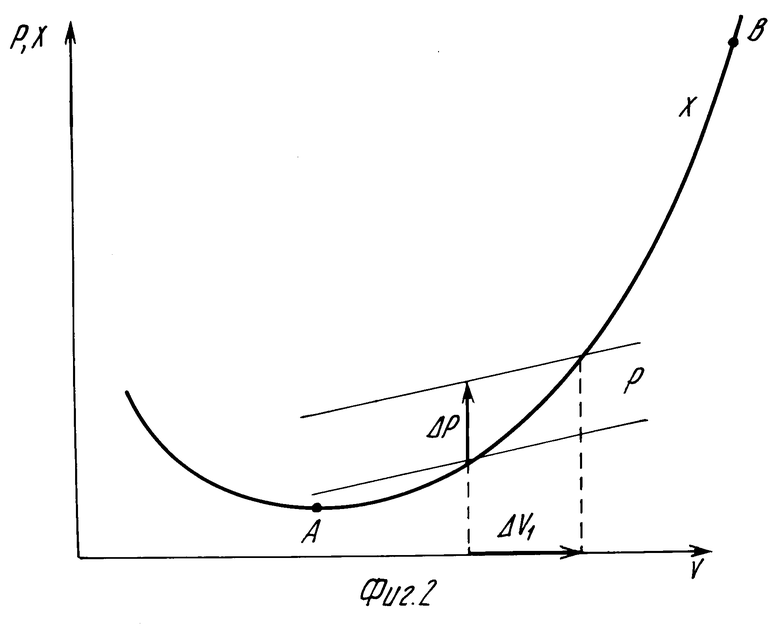
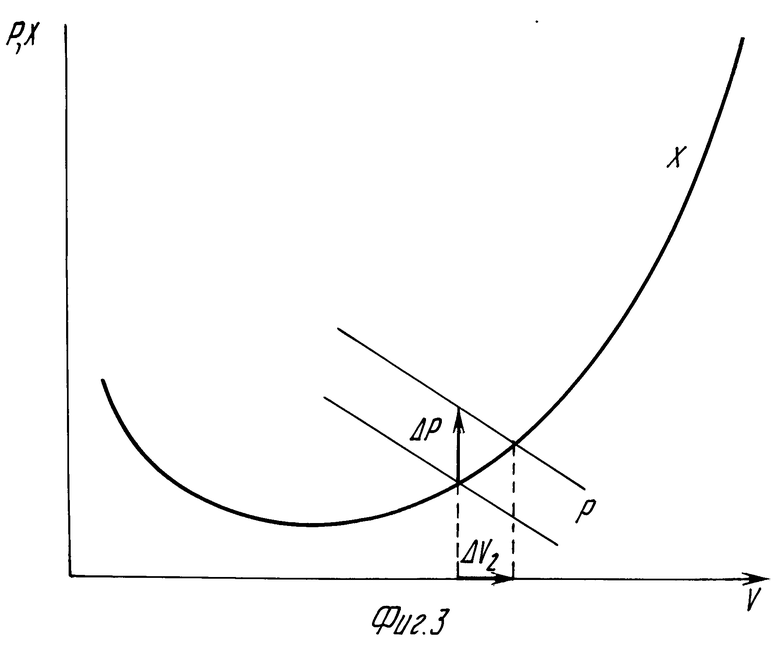
На фиг. 1 изображена конструктивная схема регулятора частоты вращения ротора турбореактивного двигателя; на фиг.2 кривые Жуковского для Л.А. с ТРД; на фиг.3 кривые Жуковского для ЛА с ТРД, в котором в процессе изменения скорости полета вводят коррекцию в настройку регулятора частоты вращения ротора при неизменном положении рычага управления двигателем (РУД); на фиг.4
характер изменения параметров движения ведомого ЛА при выдерживании заданной дистанции без коррекции и с коррекцией.
Из аэродинамики известно условие устойчивости самолета по отношению к скорости полета:
где
P тяга двигателей;
X сопротивление ЛА;
V скорость полета ЛА.
Поэтому полет осуществляется в диапазоне скоростей, соответствующих правой ветке АВ кривой Жуковского (фиг.2), как правило, ближе к точке А, где сопротивление ЛА минимально. Исправление ошибки по дистанции производят знакопеременными изменениями тяги ЛА с ТРД имеет: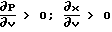
При этом на фиг. 2 видно, что при небольшом изменении тяги ΔP ТРД возникает значительное изменение по скорости ЛА Δv1 что приводит к значительному изменению дистанции.
Согласно схеме фиг.1 регулятор частоты вращения ротора турбореактивного двигателя с корректором по скорости полета самолета состоит из механических центробежных грузиков 1, пружины 2, маятника 3, прикрывающего сопло 4, жиклера постоянного сечения 5, канала подвода топлива 6, поршня 7, дозирующего крана 8, профилированного кулачка 9, рычага 10, толкателя 11, бортового компьютера 12, рулевой машины 13, указателя положения РУД 14, акселерометра 15, концевых выключателей 16 и 17.
Устройство работает следующим образом.
В бортовой компьютер 12 от указателя положения РУД 14, который преобразует положение РУД в электрический сигнал, поступает информация о начальном (предшествующем перемещению) положении РУД. Компьютер, имея данные об условиях полета положении РУД, вычисляет заданную скорость V0. Рассогласование Δv между V0 и текущим значением скорости полета ЛА V получают с помощью акселерометров, измеряющих линейное ускорение в продольном канале путем интегрирования. От компьютера идет сигнал управляющего воздействия на рулевую машину 13, который помимо РУД определяет положение профилированного кулачка 9. Концевые выключатели 16 и 17 ограничивают перемещение рулевой машины 13 ниже режима малого газа и выше максимального режима.
При отклонении скорости полета от заданной от бортового компьютера 12 на рулевую машину 13 поступает сигнал на коррекцию заданного значения частоты вращения ротора. При Δv > 0 обеспечивается поворот профилированного кулачка 9 на больший радиус. Рычаг 10, контактирующий с кулачком 9, поворачиваясь против часовой стрелки относительно опоры при помощи толкателя 11 увеличит затяжку пружины 2. Равновесие на маятнике 3 нарушится. Под действием усилия со стороны пружины 2 маятник 3, перемещаясь по часовой стрелке, уменьшает слив топлива через сопло 4. В результате этого топливо через жиклер 5 начинает поступать в полость над поршнем 7, который поворачивает дозирующий кран 8 на увеличение подачи топлива. По мере увеличения частоты вращения ротора увеличивается центробежная сила грузиков 1, под действием которой маятник 3, преодолевая усилие пружины 2, повернется против часовой стрелки, открывая слив из сопла 4. Перепад давлений на поршне 7 исчезнет, дозирующий кран 8 займет положение, соответствующее заданной частоте вращения ротора.
Заданное значение частоты вращения ротора при этом равно
n3= n30+KΔv
где
n30 заданное значение частоты вращения ротора, определяемое РУД;
k коэффициент.
При увеличении скорости полета больше заданной Δv <0, настройка регулятора частоты ротора n3 снижается, а следовательно, уменьшается тяга двигателей при неизменном положении РУД. За счет этого изменяется угол наклона зависимости тяги по скорости полета, ∂P/∂v становится меньше нуля.
Поэтому при том же приросте тяги ΔP в процессе изменения положения РУД прирост скорости полета уменьшается, т.е. Δv2< Δv1 (фиг.3), что повышает точность выдерживания расстояния между ЛА при групповом полете и в режиме дозаправки в воздухе и облегчает пилотирование ведомым ЛА.
Для оценки параметров движения ведомого самолета при выдерживании заданной дистанции создана математическая модель системы летательный аппарат - силовая установка летчик.
В ней движение ЛА описывают уравнениями движения материальной точки. Расчет высотно-скоростных и дроссельных характеристик осуществляет поэлементная нелинейная модель двигателя, а управляющее воздействие летчика на двигатель определяет статистическая модель.
Были приняты следующие допущения:
1. Ведущий самолет движется прямолинейно с постоянной скоростью.
2. Отклонение ведомого самолета по курсу и высоте отсутствует.
Результаты расчета параметров движения самолета с прототипом (линия 1, фиг. 4) и с регулятором частоты вращения ротора турбореактивного двигателя с корректором по скорости полета (линия 2, фиг.4) при заданной дистанции 50 м свидетельствуют о повышении точности выдерживания расстояния между ЛА при групповом полете в режиме дозаправки в воздухе на 11% и уменьшении числа вмешательств летчика на 22%
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РАСПРЕДЕЛЕНИЯ ВОЗДУХА ЧЕРЕЗ СОСТАВНЫЕ ЧАСТИ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 1991 |
|
RU2041374C1 |
| КИНЕСТЕТИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ДВИГАТЕЛЯМИ САМОЛЕТА | 1997 |
|
RU2114029C1 |
| ВРАЩАЮЩАЯСЯ КРЫЛАТАЯ РАКЕТА | 2014 |
|
RU2544446C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ АВИАЦИОННОГО ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2017 |
|
RU2639409C1 |
| Летательный аппарат короткого взлета и посадки с газодинамическим управлением | 2018 |
|
RU2711633C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2007 |
|
RU2378156C2 |
| СПОСОБ РАСПОЗНАВАНИЯ ТИПА ОДИНОЧНОЙ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ" | 2023 |
|
RU2807510C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ТИПА САМОЛЁТА С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2020 |
|
RU2731878C1 |
| КОНВЕРТИРУЕМЫЙ ДВУХКИЛЕВОЙ ДОЗВУКОВОЙ САМОЛЕТ ТРЕХВАРИАНТНОГО БАЗИРОВАНИЯ | 2024 |
|
RU2833909C1 |
| ТУРБОРЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2011 |
|
RU2459099C1 |
Использование: изобретение относится к авиации и может быть использовано при управлении скоростью ведомого летательного аппарата с турбореактивными двигателями (ТРД). Сущность: регулятор частоты вращения ротора ТРД с корректором по скорости полета самолета содержит механические центробежные грузики, пружину, маятник, прикрывающий сопло, поршень, дозирующий кран профилированный кулачок, рычаг и толкатель. В канал прохождения сигнала от рычага управления двигателем к профилированному кулачку подключена рулевая машина, связанная с бортовым компьютером. 4 ил.
Регулятор частоты вращения ротора турбореактивного двигателя с корректором по скорости полета самолета, содержащий механические центробежные грузики, пружину, маятник, прикрывающий сопло, поршень, дозирующий кран, профилированный кулачок, рычаг и толкатель, отличающийся тем, что в канал прохождения сигнала от рычага управления двигателем к профилированному кулачку подключена рулевая машина, связанная с бортовым компьютером.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Боднер В.А | |||
| Системы управления летательными аппаратами | |||
| - М.: Машиностроение, 1973, с.154 - 158 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Штода А.В., Морозов Ф.Н., Шиуков А.Г | |||
| Системы управления и регулирования авиационными двигателями | |||
| - М.: ВВИА им.проф.Н.Е.Жуковского, 1977, с.151 - 153. | |||
