Изобретение относится к конвертируемым дальним дозвуковым самолетам с летающим крылом и стабилизатором обратной V-образности, соединяющим в центроплане крыла вырез ε-образной планформы, имеющий внутри более чем один поворотный кольцевой канал с поршневым или турбовинтовым или турбореактивным и электрическими двигателями, приводящими больший и меньшие воздушные винты, создающие общую и распределенную тягу для вертикального взлета-посадки и скрытного, огибая рельеф, полета соответственно для выполнения миссии при подлете к цели и ее атаке со сложенными лопастями большего винта при отключенном его двигателе.
Известен (см. https://cont.ws/@Drozd/1725375) беспилотный летательный аппарат (БПЛА) "Cormorant/CityHawk" компании "Tactical Robotics" (Израиль), выполненный по схеме несущего фюзеляжа с газотурбинной/водородно-электрической силовой установкой, приводящей передний и задний подъемные вентиляторы и в двух задних кольцевых каналах боковые маршевые винты, обеспечивающие при транспортировке людей и грузов соответствующие режимы полета, автоматически огибая рельеф.
Признаки, совпадающие - надрельефный БПЛА "Cormorant" выполнен в виде несущего фюзеляжа, имеющего вес пустого 771 кг, длину 6,8 м, ширину 3,5 м, высоту 2,3 м и турбовальный двигатель (ТВаД) Turbomeca Arriel 2С2 (мощностью 944 л.с), приводящий передний и задний подъемные вентиляторы (D=1,8 м), но и два боковых винта в кольцевых каналах, обеспечивающих при взлетном его весе 1406 кг скорость 120/185 км/ч соответственно при расходе топлива 132/163 кг/час и на высоте 3600 м дальность полета с четырьмя пассажирами 200 км. Корпус БПЛА изготовлен из композиционных материалов, в котором полезная нагрузка (635 кг), включая и топливо, размещается в двух внутренних его боковых отсеках объемом 0,77 м3 каждый.
Причины, препятствующие поставленной задаче: первая - это то, что двигатель размещен в корпусе между подъемными вентиляторами, имеющими Т-образную трансмиссию с длиной валов 7,4 м, но и верхние и нижние управляемые створки, отклоняющие их воздушный поток для осуществления изменения балансировки по тангажу, крену и курсу, что усложняет управляемость и безопасность полета в случае отказа одного ТВаД. Вторая - это то, что размещение боковых кабин, подъемных вентиляторов и ТВАД в его несущем корпусе предопределяет большую площадь миделя фюзеляжа, что создает дополнительное лобовое сопротивление. Третья - это то, что для выполнения взлета/посадки и горизонтального полета имеется двойная система создания вертикальной и маршевой тяги, при этом маршевые винты при вертикальном взлете/посадке, увеличивая паразитную массу, бесполезны, что ведет к утяжелению конструкции, а отсутствие крыльев предопределяет постоянную работу подъемных вентиляторов, что весьма уменьшает, увеличивая расход топлива, весовую отдачу.
Известен самолет вертикального взлета и посадки (СВВП) типа F-35B (США) с трапециевидным крылом и подкрыльными соплами, создающими вертикальную тягу и управление по крену, имеет (см. https://wikidea.ru/wiki/Pratt_%26_Whitney_F135) турбореактивный двухконтурный двигатель (ТРДД) с отклоняемым вектором тяги сопла и отбором мощности на привод подъемного вентилятора и V-образное оперение.
Признаки, совпадающие - силовая установка СВВП включает ТРДД типа F135-PW-600 взлетной мощности 42800 кВт, имеет модуль поворотного сопла для вертикального взлета-посадки, при котором мощность 21600 кВт и 4210 кВт от ТРДД соответственно передается продольным валом и через муфту сцепления на подъемный вентилятор и отбирается посредством подачи воздуха от его компрессора на подкрыльные сопла для подъемной тяги и управления самолетом по крену.
Причины, препятствующие поставленной задаче: первая - это то, что заднее расположение ТРДД с его поворотным соплом, изменяющим вектор реактивной тяги, имеет для отбора взлетной его мощности передний вывод вала посредством редуктора и муфты сцепления на подъемный вентилятор, установленный за кабиной пилота в фюзеляже с верхней и нижней раскрываемыми створками, отклоняющими его воздушный поток в продольном направлении, что усложняет конструкцию. Вторая - это то, что размещение за кабиной пилота подъемного вентилятора диаметром 1,27 м предопределяет большую площадь миделя фюзеляжа, что создает дополнительное лобовое сопротивление. Третья - это то, что для выполнения взлета имеется двойная система создания вертикальной горячей тяги от поворотного сопла ТРДД, предопределяющего термостойкое исполнение палубы корабля, но и холодной тяги от подъемного вентилятора и подкрыльных сопел, которые при горизонтальном его полете, увеличивая паразитную массу, бесполезны, что ведет к утяжелению конструкции и уменьшению весовой отдачи. Кроме того, использование форсажного режима работы ТРДД с его тягой 19050 кгс повышает удельный расход топлива на 52%, уменьшает вдвое дальность полета и ограничивает бесфорсажную скорость не более 950 км/ч.
Наиболее близким к предлагаемому изобретению является [см. http://rbase.new-factoria.ru/missile/wobb/ikara/ikara.shtml] беспилотный летательный аппарат (БПЛА) "Icara", имеющий крыло, хвостовое оперение, фюзеляж с пусковым устройством (ПУ) управляемой ракеты (УР), двигатель силовой установки (СУ) и бортовую систему управления (БСУ) для управления с командного пункта средства базирования.
Признаки, совпадающие - БПЛА с габаритами без корабельного ПУ: длина 3,42 м, размах крыльев 1,52 м, высота 1,57 м, несет противолодочную самонаводящуюся торпеду (СНТ) типа Mk.44, имеющую при ее массе 196 кг, длине 2,57 м и диаметре 324 мм, скорость 30 узлов и дальность хода 5 км. БПЛА с торпедой Mk.44 имеет максимальную/минимальная высоту полета 300/20 м и значительный вес, составляющий 1480 кг, что ограничивает дальность до 24 км и скорость полета до 140…240 м/с.
Причины, препятствующие поставленной задаче: первая - это то, что пуск дозвукового БПЛА осуществлялся в направлении, максимально приближающем к цели. Данные о местоположении цели поступали от гидроакустической системы надводного корабля-носителя, другого корабля или противолодочного вертолета. На основании этой информации происходит постоянное обновление данных об оптимальной зоне сброса торпеды в компьютере системы управления стрельбой, который затем в полете передавал их через БСУ на БПЛА. По прибытии БПЛА в район нахождения цели торпеда Mk.44, полуутопленная с подфюзеляжным ее расположением в корпусе БПЛА по радиокоманде отделялась, спускалась на парашюте, входила в воду и начинала поиск цели. После чего БПЛА продолжает полет с работающей СУ, уводя его от места приводнения противолодочной СНТ, чтобы не создавать помех системе ее самонаведения. Сам же одноразовый БПЛА уходил из района и самоликвидировался.
Предлагаемым изобретением решается задача в указанном выше известном БПЛА "Icara" повышения скорости, дальности полета и целевой нагрузки, обеспечения автоматических, огибая рельеф, и скрытного перемещения с вооружением или людей и грузов в зону боевых действий, и возврата на средство базирования, и выполнения вертикального и короткого взлета-посадки в полетной конфигурации гибридного самолета соответственно палубного, морского и аэродромного базирования.
Отличительными признаками предлагаемого изобретения от указанного выше известного БПЛА типа "Icara", наиболее близкого к нему, являются наличие того, что он выполнен с возможностью вертикального и короткого взлета-посадки (ВВП и КВП) с вертолетной площадки и взлетно-посадочной полосы соответственно, содержит летающее развитое крыло (ЛРК), имеющее более чем один поворотный кольцевой канал (ПКК), смонтированный с более чем одним его воздушным винтом (ВВ) внутри ЛРК и/или по бокам или в их комбинации или с внешними секциями прямой или обратной стреловидности (СПС или СОС) или в комбинации последних, при этом по оси симметрии размещена линия стыковки, например, спаренных ПКК, интегрированных с центропланом ЛРК, выполненным в виде плоского кольца, содержит по бокам центроплана его подкрыльные кили обратной стреловидности (КОС), которые имеют рули направления и на их законцовках удобообтекаемые обтекатели (УОО) с амортизационными стойками их самоориентирующихся небольших неубирающихся колес велосипедного типа, образующих четырехопорное шасси, при этом в кормовом вырезе центроплана ЛРК смонтированы две хвостовые балки с их стреловидным стабилизатором обратной V-образности (COV), имеющим рули высоты и отклоненные к плоскости симметрии его консоли обратного сужения, которые, конструктивно объединяя ε-образную планформу для двух ПКК, жестко соединяют ее закон-цовками, причем каждый ПКК содержит один или боле чем один с автозапуском роторно-поршневой или турбовинтовой или турбореактивный и электрический двигатели (РПД или ТВД или ТРД и ЭД) или в их комбинации, например, в гибридной СУ (ГСУ), приводящие в каждом ПКК один и четыре соответственно больший и меньшие ВВ (БВВ и МВВ) нерегулируемого шага, взлетная тяга которых, действуя вдоль и продольной оси ПКК, и каждого его Х-образного пилона (ХОП), регулируется изменением оборотов их двигателей при создании совместной или раздельной тяги соответственно на режимах ВВП или горизонтального скрытного, огибая рельеф, высокоскоростного/скоростного полета для выполнения им миссии при подлете к цели/ее атаке с высокой/низкой звуковой сигнатурой соответственно с зафиксировано сложенными лопастями МВВ/БВВ при отключенных соответствующих их двигателей, при этом каждый ПКК, выполняя роль винтокольцевого движителя, имеет обратное сужение с размещением его V-образных на виде сбоку или спереди передней и задней кромок к продольной оси ПКК с образованием трапециевидной его планформы при горизонтальном полете на виде сверху или сбоку соответственно, выполнен без механического или с механическим приводом его поворота в вертикальной плоскости, снабжен возможностью изменения вектора горизонтальной его тяги на вертикальную и обратно посредством большей тяги нижних МВВ и верхних МВВ или следящего механического привода, которые обеспечивают соответственно его поворот вверх и вниз при скорости поворота 4,5-6,0 град/сек на требуемый угол 90° и жесткой в конечном положении последующей фиксации каждого ПКК с его БВВ и МВВ, причем РПД или ТВД либо ТРД установлен в центральной мотогондоле (ЦМГ) с ее нерегулируемым лобовым воздухозаборником, смонтированной сзади каждого ПКК на профилированных ХОП, увеличивающих наравне с профилированным ПКК несущую способность ЛРК на переходных и самолетных режимах полета, имеет передний вывод вала для отбора взлетной мощности соответственно 100% либо 20…40% и ее передачу на прямую или трансмиссией с автоматической коробкой передач на привод БВВ, но и выполнен с обеспечением отвода выхлопных его газов через соответствующее прямоточное или реактивное прямоугольное сопло (РПС), создающее с V-образной в плане задней кромкой и термопоглощающим его покрытием подъемную или маршевую тягу, обеспечению последней способствуют двухбалочная схема и COV в ЛРК, при этом тянущие один БВВ и четыре МВВ смонтированы соответственно в центре и внутри каждого ПКК без перекрытия МВВ, равным  на их удобообтекаемых гондолах (УОГ), установленных на ХОП, имеют соотношение их диаметров равным: dм≤0,41×DБ, м (где: dм и DБ - диаметры МВВ и БВВ, причем ЭД-генераторы (ЭДГ) и их МВВ интегрированы с их УОГ, обеспечивают в ГСУ, например, с ее ТВД или ТРД для подзаряди аккумуляторной батареи способ генерации мощности от внешнего источника энергии посредством вращения четырех ЭДГ от авторотации их МВВ при косой их обдувке в каждом ПКК от набегающего воздушного потока при горизонтальном полете с маршевой тягой, создаваемой его БВВ или ТРД в турбовинтовом или реактивном ДДС соответственно, при этом выполнение ВВП, зависания и автоматической вертикальной посадки осуществляется четырьмя равновеликими МВВ, вращающимися в одном направлении и размещенными в ПКК за БВВ, который встречно вращается с МВВ и вынесен к передней кромке каждого из спаренных ПКК, образующих десятивинтовую несущую схему (ДВНС), которая, создавая противоположные крутящие моменты для управления, обеспечивает изменение высоты его полета совместно всеми БВВ и МВВ за счет уменьшения или увеличения оборотов соответствующих их двигателей в ДВНС-Х10, но и балансировку по тангажу и крену соответственно путем изменения частоты вращения двух пар передних с двумя парами задних МВВ и двух пар левых с двумя парами правых МВВ, а изменение балансировки по курсу осуществляется за счет увеличения оборотов четырех МВВ и уменьшения, сохраняя общую подъемную силу, четырех МВВ соответственно в левом и правом ПКК с их встречно вращающимися МВВ, причем для выполнения режима взлета-посадки с максимальным взлетным весом, например, ДДС КВП аэродромного базирования с его ГСУ, включающей, например, ЭДГ и ТРД, имеющей возможность создания наклонно-маршевой тяги при отклонении и жесткой фиксации спаренных ПКК с их ЦМГ под углом 40°…45° ее продольной оси к горизонтали, при этом в ГСУ, например, с ее ТВД и ЭДГ после остановки тормозами в каждом ПКК, например, четырехлопастных всех БВВ с его ТВД или всех МВВ с их ЭДГ и фиксированного размещения каждой их пары лопастей параллельно и перпендикулярно плоскости симметрии, осуществляется автоматическое назад по полету складывание лопастей вдоль соответствующих продольных боковых уступов на ЦМГ и УОГ, обеспечивается соответственно полетная его конфигурация, например, электрического или турбовинтового самолета и обратно, причем упомянутая БСУ головного ДДС, например, палубного базирования на противолодочных кораблях проекта 1155, имеет обтекатели двухчастотной бортовой радиолокационной станции (РЛС) с активной фазированной антенной решеткой (АФАР) и/или оптико-электронной станцией (ОЭС), установленные соответственно в носовой части переднего крыльевого обтекателя ЛРК, имеющего сверху топливную штангу системы дозаправки в воздухе, и/или снизу него с обеспечением геолокации малозаметной цели и управлением оружейными его нагрузками и по лазерному каналу связи более чем одним удаленно-ведомым ДДС (УВДДС) с наведением на цель их упомянутых УР.
на их удобообтекаемых гондолах (УОГ), установленных на ХОП, имеют соотношение их диаметров равным: dм≤0,41×DБ, м (где: dм и DБ - диаметры МВВ и БВВ, причем ЭД-генераторы (ЭДГ) и их МВВ интегрированы с их УОГ, обеспечивают в ГСУ, например, с ее ТВД или ТРД для подзаряди аккумуляторной батареи способ генерации мощности от внешнего источника энергии посредством вращения четырех ЭДГ от авторотации их МВВ при косой их обдувке в каждом ПКК от набегающего воздушного потока при горизонтальном полете с маршевой тягой, создаваемой его БВВ или ТРД в турбовинтовом или реактивном ДДС соответственно, при этом выполнение ВВП, зависания и автоматической вертикальной посадки осуществляется четырьмя равновеликими МВВ, вращающимися в одном направлении и размещенными в ПКК за БВВ, который встречно вращается с МВВ и вынесен к передней кромке каждого из спаренных ПКК, образующих десятивинтовую несущую схему (ДВНС), которая, создавая противоположные крутящие моменты для управления, обеспечивает изменение высоты его полета совместно всеми БВВ и МВВ за счет уменьшения или увеличения оборотов соответствующих их двигателей в ДВНС-Х10, но и балансировку по тангажу и крену соответственно путем изменения частоты вращения двух пар передних с двумя парами задних МВВ и двух пар левых с двумя парами правых МВВ, а изменение балансировки по курсу осуществляется за счет увеличения оборотов четырех МВВ и уменьшения, сохраняя общую подъемную силу, четырех МВВ соответственно в левом и правом ПКК с их встречно вращающимися МВВ, причем для выполнения режима взлета-посадки с максимальным взлетным весом, например, ДДС КВП аэродромного базирования с его ГСУ, включающей, например, ЭДГ и ТРД, имеющей возможность создания наклонно-маршевой тяги при отклонении и жесткой фиксации спаренных ПКК с их ЦМГ под углом 40°…45° ее продольной оси к горизонтали, при этом в ГСУ, например, с ее ТВД и ЭДГ после остановки тормозами в каждом ПКК, например, четырехлопастных всех БВВ с его ТВД или всех МВВ с их ЭДГ и фиксированного размещения каждой их пары лопастей параллельно и перпендикулярно плоскости симметрии, осуществляется автоматическое назад по полету складывание лопастей вдоль соответствующих продольных боковых уступов на ЦМГ и УОГ, обеспечивается соответственно полетная его конфигурация, например, электрического или турбовинтового самолета и обратно, причем упомянутая БСУ головного ДДС, например, палубного базирования на противолодочных кораблях проекта 1155, имеет обтекатели двухчастотной бортовой радиолокационной станции (РЛС) с активной фазированной антенной решеткой (АФАР) и/или оптико-электронной станцией (ОЭС), установленные соответственно в носовой части переднего крыльевого обтекателя ЛРК, имеющего сверху топливную штангу системы дозаправки в воздухе, и/или снизу него с обеспечением геолокации малозаметной цели и управлением оружейными его нагрузками и по лазерному каналу связи более чем одним удаленно-ведомым ДДС (УВДДС) с наведением на цель их упомянутых УР.
Кроме того, упомянутое ЛРК и его синхронно складные вниз или вверх правая СОС и левая СПС, имея асимметричную стреловидность, образуют пилообразные переднюю и заднюю его кромки, обеспечивают, уменьшая волновое сопротивление и потребную маршевую тяговооруженность, высокоскоростной или дозвуковой горизонтальный полет транспортного или ударного ДДС при синхронном отклонении вниз СОС и СПС с угла ϕ=-10° до ϕ=-25° или ϕ=-65° с упомянутой ГСУ и ее ЭДГ и ТВД или ТРД соответственно, причем ЛРК с разнонаправленной стреловидностью χ=-35° СОС и χ=+35° СПС, которые, расширяя его двустороннюю асимметричность, обеспечивают за счет продольного их смещения уменьшение волнового сопротивления, но и существенное до 40% увеличение топливной эффективности либо скорости и дальности полета соответственно транспортного либо ударного ДДС, содержащего, например, в упомянутой ГСУ с ее ЭДГ и РПД либо ТВД для скоростного либо высокоскоростного горизонтального полета, при этом оптимизация продольного смещения СОС и СПС в ЛРК достигается определением каждого минимума соотношения для несущей поверхности, например, коэффициента волнового сопротивления (Схавл)/минимального сопротивления (Cxamin), которое определяется в зависимости от расстояния продольного смещения СОС и СПС как процентное отношение от максимального расстояния их смещения, которое составляет Схавл/Cxamin ≈77,7% и которое соответствует реализации продольного смещения СОС и СПС при оценке результирующего коэффициента волнового сопротивления (Схавл), например, путем определения расстояния продольного смещения, при котором волновое сопротивление минимизировано для заданной конструкции ЛРК, причем планер ДДС имеет на концах упомянутых хвостовых балок магнитометр и квантовый гравиградиометр, которые обеспечивают при полете над поверхностью воды поиск подлодок, защищен от соленного морского воздуха, выполнен по малозаметной технологии с покрытием, поглощающим радиоволны разной длины, имеет цельную конструкцию жесткого корпуса с использованием алюминиево-литиевых сплавов и улучшенных по структурному старению композиционных материалов, усиленных лонжеронами и ребрами жесткости в единой его обшивке с упомянутым ЛРК и его ПКК и развитыми КОС, имеющими надувные поплавки и систему надувки, позволяющие, не снижая крейсерскую скорость, выполнять ВВП и КВП с поверхности воды, которые армированы углеродным волокном, способным защитить от мощных электромагнитных вспышек или воздействия лазерного излучения, выдерживать значительные количества тепла, особенно, его упомянутой БСУ, обеспечивающей управление упомянутого УВДДС с наземного командного пункта или пилотом рядом летящего упомянутого головного ДДС или автоматическое выполнение ими надрельефного полета или над поверхностью воды посредством системы цифровой корреляции с рельефом местности или волнения моря, которую с ее каналом позиционирования ГЛОНАСС и радиолокационным высотомером дополняет, установленная снизу упомянутого крыльевого обтекателя ЛРК цифровая тепловизионная камера, обеспечивающая корреляцию отображения объекта для фиксации местности перед ним, но и сравнивание информации с камеры и цифровых ее изображений, полученных с помощью спутников или воздушной разведки и хранящихся в памяти компьютера БСУ цифровых карт высот местности, над которой, огибая рельеф и препятствия, предстоит скрытно пролетать, при этом каждый упомянутый КОС имеет в передней его части проем, в котором устанавливается сменный модуль, как-то: более чем один подвесной топливный бак или контейнер для грузов или спаренных авиапулеметов ГУВ-8700, поражающих БПЛА или катера-камикадзе барражирующим или каботажным УВДДС, либо ярусный пилон с упомянутыми их УР либо автоматически удаляемый из КОС узкий фюзеляж с верхней выкидной парашютной спасательной системой, используемой при ВВП и отказе всех двигателей, либо катер-камикадзе или торпедный катер-катамаран, возвращаемый в КОС УВДДС морского базирования.
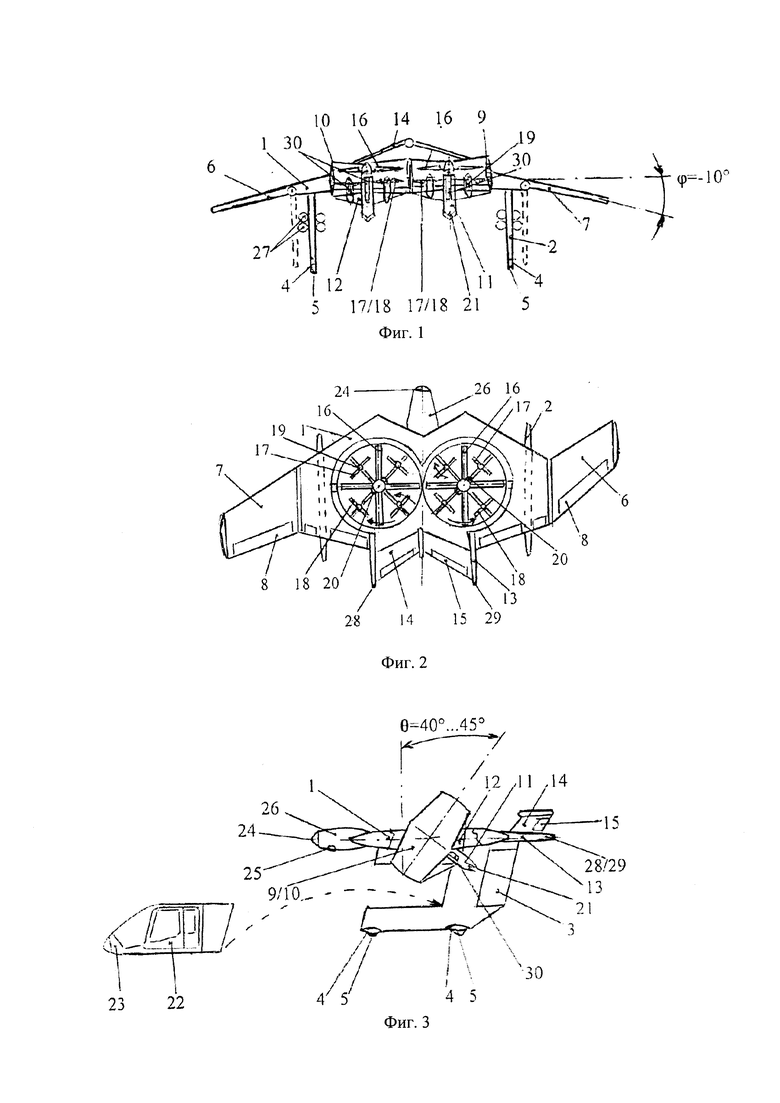
Предлагаемое изобретение конвертируемого ДДС с ЛРК, имеющим складные внешние СОС и СПС, два подкрыльных КОС, спаренные ПКК с их БВВ и МВВ, приводимыми ТРД в ЦМГ и ЭДГ в их УОГ, иллюстрируется на общих видах и фиг. 1/2-3:
фиг. 1/2 в конфигурации палубного ДДС ВВП с разложенными в ЛРК его СОС и СПС под их углом ϕ=-10° (сложенные показаны пунктиром), ДВНС-ХЮ, создающей вертикальную тягу в спаренных ПКК с их БВВ и МВВ, приводимыми ТРД и ЭДГ;
фиг. 3 в конфигурации наземного ДДС КВП с ЛРК, ТРД с БВВ, ЭДГ с МВВ, создающими наклонно-маршевую тягу при отклонении спаренных ПКК под углом 45°.
Транспортно-ударный ДДС представлен на фиг. 1/2-3, выполнен по концепции ДВНС-Х10 с ЛРК 1, содержащим подкрыльные два КОС 2, имеющие рули направления 3 и на их законцовках УОО 4 амортизационные стойки (на фиг. 1-3 не показано) их небольших неубирающихся колес 5 четырехопорного шасси, внешние правую СОС 6 и левую СПС 7 с их флаперонами 8, спаренные левый 9 и правый 10 ПКК, установленные внутри ЛРК 1 в вырезе ε-образной планформы с их ЦМГ 11, смонтированных сзади их на ХОП 12. На концах хвостовых балок 13 имеется COV 14 с рулями высоты 15, консоли которого жестко объединяют вырез £-образной планформы. Вынесенные к передней и задней кромкам каждого ПКК 9-10 соответственно один БВВ 16 и двух пар передних 17 и задних 18 МВВ установлены на выходных валах в ЦМГ 11 и УОГ 19. Каждая ЦМГ 11 с лобовым воздухозаборником 20 имеет ТРД с его РПС 21 и для отбора взлетной мощности передний вывод вала, вращательно связанный через муфту сцепления с главным редуктором, передающим крутящий момент на тянущий БВВ 16 встречно вращающийся с толкающими МВВ 17-18.
Управление головным ДДС обеспечивается пилотом из кабины 22 фюзеляжа 23, установленного в проеме одного КОС 2, а целеуказание - его радаром с АФАР 24 и ОЭС 25, смонтированным в носовой части крыльевого обтекателя 26 и снизу него (см. фиг. 3). Противолодочные УР-торпеды МТТ закреплены на их ярусных ПУ 27, установленных по бокам другого КОС 2. На концах хвостовых балок 13 имеется магнитометр 28 и квантовый гравиградиометр 29, обеспечивающие при полете над поверхностью воды поиск подлодок. При создании подъемной силы БВВ 16 и МВВ 17-18 и реактивной тяги ТРД или совместной наклонно-маршевой их тяги при разбеге обеспечиваются режимы ВВП и зависания или КВП (см. фиг. 3) при соответствующем положении спаренных ПКК 9-10, изменяющих угол их поворота за счет тяги передних и задних их МВВ 17-18. На режимах ВВП и зависания используется подъемная тяга, обеспечиваемая двумя ТРД совместно со всеми БВВ 16 и МВВ 17-18, которые, создавая противоположные крутящие моменты для управления, обеспечивают изменение высоты его полета за счет уменьшения или увеличения оборотов соответствующих двигателей БВВ 16 и МВВ 17-18, но и балансировку по тангажу и крену соответственно путем изменения частоты вращения двух пар передних 17 с двумя парами задних 18 МВВ 17 и пары левых 17-18 с парой правых 17-18 МВВ, а изменение балансировки по курсу осуществляется за счет увеличения оборотов четырех МВВ 17-18 и уменьшения, сохраняя общую подъемную силу, четырех МВВ 17-18 соответственно в левом 9 и правом 10 ПКК с их встречно вращающимися МВВ 17-18. Для перехода в конфигурацию реактивного ДДС после остановки тормозами в каждом ПКК 9-10 четырехлопастных БВВ 16 и МВВ 17-18 и фиксированного размещения каждой пары лопастей параллельно и перпендикулярно плоскости симметрии, обеспечивается автоматическое назад по полету складывание лопастей вдоль соответствующих продольных боковых уступов 30 на ЦМГ 11 и их УОГ 19. На режиме перехода ДДС подъемная сила и маршевая тяга создается ЛРК 1 с БВВ 16, МВВ 17-18 и совместно с двумя ТРД соответственно, при его полете как реактивного самолета со скоростью М=0,7…0,75 - ЛРК 1, реактивная тяга- двумя ТРД. При горизонтальном полете палубного ДДС управление тангажом и рысканьем осуществляется соответственно отклонением рулей высоты 15 на COV 14 и направления 3 на двух КОС 2, а по крену-дифференциальным отклонением флаперонов 8 на СОС 6 и СПС 7, которые для уменьшения габаритов ЛРК 1 на его стоянке или при выполнении ВВП отклоняются синхронно, например, вниз и фиксируются без выноса их за КОС 2 (см. фиг. 1).
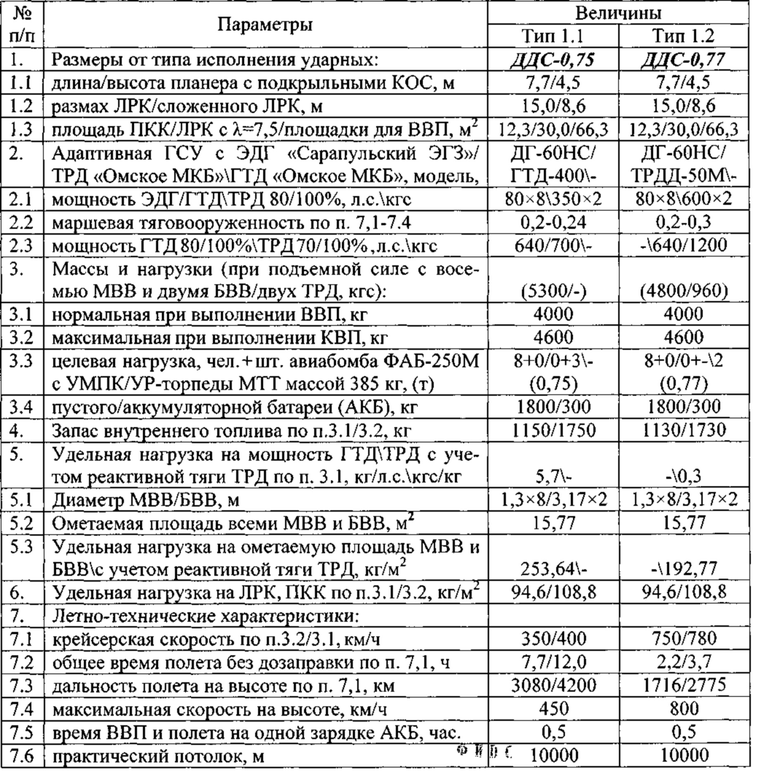
Таким образом, первоочередное освоение палубного ДДС-0,4, имеющего взлетный вес 2000 кг и два РПД-150Т «ЦИАМ» мощностью по 150 л.с.с их БВВ (D=2,24 м) и восемь ЭДГ ДГ-30НС с их МВВ (d=0,92 м), позволит отработать ВВП со спаренными ПКК, изменяющими угол их поворота за счет тяги передних и задних их МВВ, но и достичь время полета 9 часов барражирующему ДДС-0,4, вооруженному для поражения БПЛА спаренными пулеметами 12,7 и 7,62 калибра в двух ГУВ-8700 и охраны корабля пр. 1155, на котором взамен двух вертолетов Ка-27 базируется шесть ДДС-0,4. Освоение ударного ДДС-1,5 с удвоенной ДВНС-Х10 (см. табл. 1) и ее ТРДД-50М тягой 600×4,кгс и ЭДГ ДГ-60НС мощностью 60×16,кВт, приводящими БВВ (D=3,17×4) и МВВ (d=1,3×16) в их спаренных ПКК и внешних правом и левом ПКК, интегрированных с СОС и СПС, изменяющего полетную конфигурацию с самолета ВВП в реактивный самолет, имеет взлетный вес 8000 кг и площадку для ВВП 110 м2, позволит удлинить радиус действия с 60 км до 918 км шести авиабомб ФАБ-250М с УМПК.
Таблица 1
Предварительные технические требования к ударным ДДС с ДВНС-Х10 и ГСУ
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ УДАРНО-РАЗВЕДЫВАТЕЛЬНЫЙ АВИАНОСИТЕЛЬ | 2023 |
|
RU2829114C1 |
| АВИАКОМПЛЕКС БОЕВОЙ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2023 |
|
RU2816404C1 |
| КОНВЕРТИРУЕМЫЙ ДОЗВУКОВОЙ САМОЛЕТ | 2024 |
|
RU2839782C1 |
| УДАРНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2022 |
|
RU2810821C1 |
| БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2023 |
|
RU2823932C1 |
| БЕСПИЛОТНЫЙ САМОЛЕТ-ВЕРТОЛЕТ-РАКЕТОНОСЕЦ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2018 |
|
RU2699514C1 |
| АВИАЦИОННАЯ КОРАБЕЛЬНО-АРКТИЧЕСКАЯ СИСТЕМА | 2020 |
|
RU2753894C1 |
| АВИАКОМПЛЕКС БОЕВОЙ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2023 |
|
RU2827270C1 |
| МОДУЛЬНЫЕ САМОЛЕТЫ-ВЕРТОЛЕТЫ ДЛЯ КОРАБЕЛЬНЫХ АВИАЦИОННО-РАКЕТНЫХ СИСТЕМ | 2020 |
|
RU2750586C1 |
| СИСТЕМА КОРАБЕЛЬНО-АВИАЦИОННАЯ РАКЕТНО-ПОРАЖАЮЩАЯ | 2020 |
|
RU2753779C1 |
Изобретение относится к области авиации, в частности к конструкциям конвертируемых самолетов. Конвертируемый двухкилевой дозвуковой самолет (ДДС) имеет крыло, хвостовое оперение, фюзеляж с пусковым устройством управляемой ракеты, двигатель силовой установки (СУ) и бортовую систему управления. ДДС выполнен с возможностью вертикального и короткого взлета/посадки. ДДС содержит летающее развитое крыло (ЛРК), имеющее более чем один поворотный кольцевой канал (ПКК), смонтированный с более чем одним воздушным винтом (ВВ) внутри ЛРК. Каждый ПКК содержит один или более чем один с автозапуском роторно-поршневой, или турбовинтовой, или турбореактивный и электрический двигатели (РПД, или ТВД, или ТРД и ЭД) в гибридной СУ, приводящие в каждом ПКК один больший и четыре меньших ВВ нерегулируемого шага. Обеспечивается повышение скорости, дальности полета, увеличение целевой нагрузки, возможность вертикального взлета и посадки. 1 з.п. ф-лы, 3 ил., 1 табл.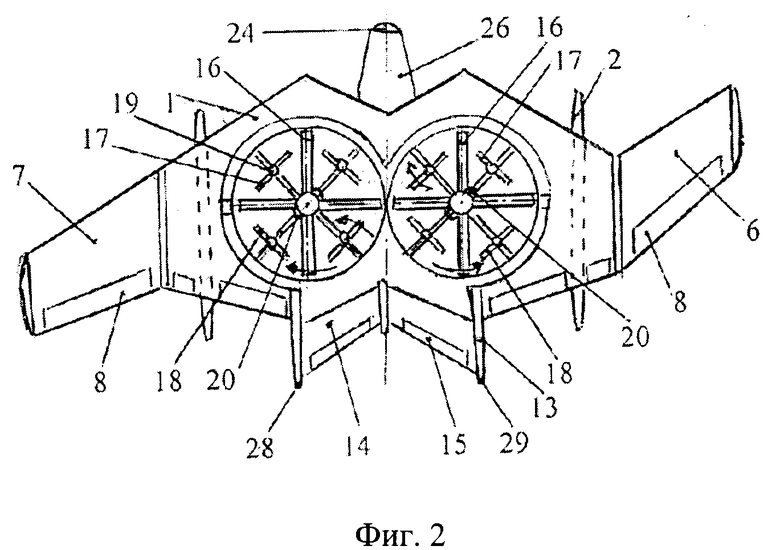
1. Конвертируемый двухкилевой дозвуковой самолет (ДДС), имеющий крыло, хвостовое оперение, фюзеляж с пусковым устройством (ПУ) управляемой ракеты (УР), двигатель силовой установки (СУ) и бортовую систему управления (БСУ), отличающийся тем, что он выполнен с возможностью вертикального и короткого взлета-посадки (ВВП и КВП) с вертолетной площадки и взлетно-посадочной полосы соответственно, содержит летающее развитое крыло (ЛРК), имеющее более чем один поворотный кольцевой канал (ПКК), смонтированный с более чем одним его воздушным винтом (ВВ) внутри ЛРК и/или по бокам или в их комбинации или с внешними секциями прямой или обратной стреловидности (СПС или СОС) или в комбинации последних, при этом по оси симметрии размещена линия стыковки, например, спаренных ПКК, интегрированных с центропланом ЛРК, выполненным в виде плоского кольца, содержит по бокам центроплана его подкрыльные кили обратной стреловидности (КОС), которые имеют рули направления и на их законцовках удобообтекаемые обтекатели (УОО) с амортизационными стойками их самоориентирующихся небольших неубирающихся колес велосипедного типа, образующих четырехопорное шасси, при этом в кормовом вырезе центроплана ЛРК смонтированы две хвостовые балки с их стреловидным стабилизатором обратной V-образности (COV), имеющим рули высоты и отклоненные к плоскости симметрии его консоли обратного сужения, которые, конструктивно объединяя ε-образную планформу для двух ПКК, жестко соединяют ее законцовками, причем каждый ПКК содержит один или более чем один с автозапуском роторно-поршневой, или турбовинтовой, или турбореактивный и электрический двигатели (РПД, или ТВД, или ТРД и ЭД) или в их комбинации, например, в гибридной СУ (ГСУ), приводящие в каждом ПКК один и четыре соответственно больший и меньшие ВВ (БВВ и МВВ) нерегулируемого шага, взлетная тяга которых, действуя вдоль и продольной оси ПКК, и каждого его Х-образного пилона (ХОП), регулируется изменением оборотов их двигателей при создании совместной или раздельной тяги соответственно на режимах ВВП или горизонтального скрытного, огибая рельеф, высокоскоростного/скоростного полета для выполнения им миссии при подлете к цели/ее атаке с высокой/низкой звуковой сигнатурой соответственно с зафиксированно сложенными лопастями МВВ/БВВ при отключенных соответствующих их двигателях, при этом каждый ПКК, выполняя роль винтокольцевого движителя, имеет обратное сужение с размещением его V-образных на виде сбоку или спереди передней и задней кромок к продольной оси ПКК с образованием трапециевидной его планформы при горизонтальном полете на виде сверху или сбоку соответственно, выполнен без механического или с механическим приводом его поворота в вертикальной плоскости, снабжен возможностью изменения вектора горизонтальной его тяги на вертикальную и обратно посредством большей тяги нижних МВВ и верхних МВВ или следящего механического привода, которые обеспечивают соответственно его поворот вверх и вниз при скорости поворота 4,5-6,0 град/с на требуемый угол 90° и жесткой в конечном положении последующей фиксации каждого ПКК с его БВВ и МВВ, причем РПД или ТВД либо ТРД установлен в центральной мотогондоле (ЦМГ) с ее нерегулируемым лобовым воздухозаборником, смонтированной сзади каждого ПКК на профилированных ХОП, увеличивающих наравне с профилированным ПКК несущую способность ЛРК на переходных и самолетных режимах полета, имеет передний вывод вала для отбора взлетной мощности соответственно 100% либо 20…40% и ее передачу на прямую или трансмиссией с автоматической коробкой передач на привод БВВ и выполнен с обеспечением отвода выхлопных его газов через соответствующее прямоточное или реактивное прямоугольное сопло (РПС), создающее с V-образной в плане задней кромкой и термопоглощающим его покрытием подъемную или маршевую тягу, обеспечению последней способствуют двухбалочная схема и COV в ЛРК, при этом тянущие один БВВ и четыре МВВ смонтированы соответственно в центре и внутри каждого ПКК без перекрытия МВВ, амвв=2,1…2,2, на их удобообтекаемых гондолах (УОГ), установленных на ХОП, имеют соотношение их диаметров, равное dм≤0,41DБ, где dм и DБ - диаметры МВВ и БВВ, причем ЭД-генераторы (ЭДГ) и их МВВ интегрированы с их УОГ, обеспечивают в ГСУ, например, с ее ТВД или ТРД для подзаряди аккумуляторной батареи способ генерации мощности от внешнего источника энергии посредством вращения четырех ЭДГ от авторотации их МВВ при косой их обдувке в каждом ПКК от набегающего воздушного потока при горизонтальном полете с маршевой тягой, создаваемой его БВВ или ТРД в турбовинтовом или реактивном ДДС соответственно, при этом выполнение ВВП, зависания и автоматической вертикальной посадки осуществляется четырьмя равновеликими МВВ, вращающимися в одном направлении и размещенными в ПКК за БВВ, который встречно вращается с МВВ и вынесен к передней кромке каждого из спаренных ПКК, образующих десятивинтовую несущую схему (ДВНС), которая, создавая противоположные крутящие моменты для управления, обеспечивает изменение высоты его полета совместно всеми БВВ и МВВ за счет уменьшения или увеличения оборотов соответствующих их двигателей в ДВНС-Х10, но и балансировку по тангажу и крену соответственно путем изменения частоты вращения двух пар передних с двумя парами задних МВВ и двух пар левых с двумя парами правых МВВ, а изменение балансировки по курсу осуществляется за счет увеличения оборотов четырех МВВ и уменьшения, сохраняя общую подъемную силу, четырех МВВ соответственно в левом и правом ПКК с их встречно вращающимися МВВ, причем для выполнения режима взлета-посадки с максимальным взлетным весом, например, ДДС КВП аэродромного базирования с его ГСУ, включающей, например, ЭДГ и ТРД, имеющей возможность создания наклонно-маршевой тяги при отклонении и жесткой фиксации спаренных ПКК с их ЦМГ под углом 40°…45° ее продольной оси к горизонтали, при этом в ГСУ, например, с ее ТВД и ЭДГ после остановки тормозами в каждом ПКК, например четырехлопастных всех БВВ с его ТВД или всех МВВ с их ЭДГ и фиксированного размещения каждой их пары лопастей параллельно и перпендикулярно плоскости симметрии, осуществляется автоматическое назад по полету складывание лопастей вдоль соответствующих продольных боковых уступов на ЦМГ и УОГ, обеспечивается соответственно полетная его конфигурация, например, электрического или турбовинтового самолета и обратно, причем упомянутая БСУ головного ДДС, например палубного базирования на противолодочных кораблях проекта 1155, имеет обтекатели двухчастотной бортовой радиолокационной станции (РЛС) с активной фазированной антенной решеткой (АФАР) и/или оптико-электронной станцией (ОЭС), установленные соответственно в носовой части переднего крыльевого обтекателя ЛРК, имеющего сверху топливную штангу системы дозаправки в воздухе, и/или снизу него с обеспечением геолокации малозаметной цели и управлением оружейными его нагрузками и по лазерному каналу связи более чем одним удаленно-ведомым ДДС (УВДДС) с наведением на цель их упомянутых УР.
2. Конвертируемый ДДС по п. 1, отличающийся тем, что упомянутое ЛРК и его синхронно складные вниз или вверх правая СОС и левая СПС, имея асимметричную стреловидность, образуют пилообразные переднюю и заднюю его кромки, обеспечивают, уменьшая волновое сопротивление и потребную маршевую тяговооруженность, высокоскоростной или дозвуковой горизонтальный полет транспортного или ударного ДДС при синхронном отклонении вниз СОС и СПС с угла ϕ=-10° до ϕ=-25° или ϕ=-65° с упомянутой ГСУ и ее ЭДГ и ТВД или ТРД соответственно, причем ЛРК с разнонаправленной стреловидностью χ=-35° СОС и χ=+35° СПС, которые, расширяя его двустороннюю асимметричность, обеспечивают за счет продольного их смещения уменьшение волнового сопротивления, но и существенное до 40% увеличение топливной эффективности либо скорости и дальности полета соответственно транспортного либо ударного ДДС, содержащего, например, в упомянутой ГСУ с ее ЭДГ и РПД либо ТВД для скоростного либо высокоскоростного горизонтального полета, при этом оптимизация продольного смещения СОС и СПС в ЛРК достигается определением каждого минимума соотношения для несущей поверхности, например, коэффициента волнового сопротивления (Схавл)/минимального сопротивления (Cxamin), которое определяется в зависимости от расстояния продольного смещения СОС и СПС как процентное отношение от максимального расстояния их смещения, которое составляет Схавл /Cxamin≈77,7% и которое соответствует реализации продольного смещения СОС и СПС при оценке результирующего коэффициента волнового сопротивления (Схавл), например, путем определения расстояния продольного смещения, при котором волновое сопротивление минимизировано для заданной конструкции ЛРК, причем планер ДДС имеет на концах упомянутых хвостовых балок магнитометр и квантовый гравиградиометр, которые обеспечивают при полете над поверхностью воды поиск подлодок, защищен от соленого морского воздуха, выполнен по малозаметной технологии с покрытием, поглощающим радиоволны, имеет цельную конструкцию жесткого корпуса с использованием алюминиево-литиевых сплавов и улучшенных по структурному старению композиционных материалов, усиленных лонжеронами и ребрами жесткости в единой его обшивке с упомянутым ЛРК и его ПКК и развитыми КОС, имеющими надувные поплавки и систему надувки, позволяющие, не снижая крейсерскую скорость, выполнять ВВП и КВП с поверхности воды, которые армированы углеродным волокном, способным защитить от мощных электромагнитных вспышек или воздействия лазерного излучения, выдерживать значительные количества тепла, особенно, его упомянутой БСУ, обеспечивающей управление упомянутого УВДДС с наземного командного пункта или пилотом рядом летящего упомянутого головного ДДС или автоматическое выполнение ими надрельефного полета или над поверхностью воды посредством системы цифровой корреляции с рельефом местности или волнения моря, которую с ее каналом позиционирования ГЛОНАСС и радиолокационным высотомером дополняет установленная снизу упомянутого крыльевого обтекателя ЛРК цифровая тепловизионная камера, обеспечивающая корреляцию отображения объекта для фиксации местности перед ним и сравнивание информации с камеры и цифровых ее изображений, полученных с помощью спутников или воздушной разведки и хранящихся в памяти компьютера БСУ цифровых карт высот местности, над которой, огибая рельеф и препятствия, предстоит скрытно пролетать, при этом каждый упомянутый КОС имеет в передней его части проем, в котором устанавливается сменный модуль, как-то: более чем один подвесной топливный бак или контейнер для грузов или спаренных авиапулеметов ГУВ-8700, поражающих БПЛА или катера-камикадзе барражирующим или каботажным УВДДС, либо ярусный пилон с упомянутыми их УР либо автоматически удаляемый из КОС узкий фюзеляж с верхней выкидной парашютной спасательной системой, используемой при ВВП и отказе всех двигателей, либо катер-камикадзе или торпедный катер-катамаран, возвращаемый в КОС УВДДС морского базирования.
| ПРОТИВОКОРАБЕЛЬНЫЙ АВИАЦИОННО-УДАРНЫЙ КОМПЛЕКС | 2020 |
|
RU2749162C1 |
| БЕСПИЛОТНЫЙ КОНВЕРТОПЛАН С КАНАЛЬНЫМИ ВИНТАМИ | 2016 |
|
RU2629473C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2639352C1 |
| US 20130026305 A1, 31.01.2013 | |||
| CN 109484634 A, 19.03.2019. | |||

