Изобретение относится к области авиации, а именно к летательным аппаратам короткого взлета и посадки и свободным полетом. Для вертикального взлета и посадки летательного аппарата требуется вертикальная тяга на 10-20% превосходящую взлетную массу аппарата. (Энциклопедия «Авиация», ЦАГИ им. проф. Н.Е.Жуковского, изд. «Большая российская энциклопедия», Москва, 1994 г., с. 501). При вертикальном взлете силовая установка летательного аппарата обеспечивает вертикальную тягу и, лишь после набора необходимой высоты, обеспечивает горизонтальную составляющую тяги.
Для увеличения целевой нагрузки и запаса топлива летательные аппараты вертикального взлета и посадки могут иметь режим короткого взлета или же короткий разбег по вертикально-наклонной траектории. При этом силовая установка летательного аппарата создает как вертикальную, так и горизонтальную тягу. Но и в этом случае требуется высокая энерговооруженность летательного аппарата (Энциклопедия «Авиация», ЦАГИ им. проф. Н.Е.Жуковского, изд. «Большая российская энциклопедия», Москва, 1994 г., с. 502).
Известен способ создания вертикальной тяги а также управляющих сил и моментов, заключающийся в перемещении объемов воздуха с помощью вынесенных вентиляторов, располагаемых в фюзеляже и в крыле (Е.И. Ружицкий «Американские самолеты вертикального взлета», М., OOO «Издательство Астрель», ООО «Издательство АСТ», 2000). Изменяя направление потока воздуха, идущего от вентиляторов, можно получить требуемый управляющий момент в соответствующем канале управления. Известен летательный аппарат вертикального взлета и посадки с турбовентиляторной силовой установкой (XV-5A). Силовая установка летательного аппарата состоит из двух турбореактивных двигателей (ТРД) и трех вентиляторов, установленных в фюзеляже (один) и в крыльях (два). На вертикальных режимах полета газы ТРД приводят во вращение вентиляторы, а на горизонтальных режимах газы вытекают через реактивные сопла двигателей. Вентиляторы имеют отклоняемые выходные жалюзи. Поперечное и путевое управление самолетом на вертикальных режимах осуществляется путем дифференциального отклонения жалюзи крыльевых вентиляторов. Продольное управление обеспечивается вентилятором, установленным в фюзеляже. На горизонтальных режимах полета самолет управляется обычными рулевыми поверхностями. Створки вентиляторов, в открытом состоянии обеспечивающие доступ воздуха, в горизонтальном полете, закрываются. Недостатком такого способа и устройства, его реализующего, является большая длина газопроводов, связывающих ТРД с турбинами, приводящими во вращение вентиляторы и сложность технической системы поворота жалюзи и створок вентиляторов.
Кроме того, применение отклоняемых рулевых поверхностей повышает заметность таких летательных аппаратов.
Из патентной информации известны аналогичные примеры решения подобной задачи, например патент РФ 2531432 от 04.12.2012, В64С 29/00.
Летательный аппарат, реализующий способ создания системы сил летательного аппарата вертикального взлета и посадки (патент РФ 2531432 от 04.12.2012, В64С 29/00), содержит крыло аэродинамического сечения с верхней выпуклой поверхностью, в котором размещен нестационарный сверхзвуковой эжектор, образованный системой каналов, связывающих воздухозаборную щель постоянной площади, являющуюся маршевым впускным устройством, расположенную у передней кромки профиля, и воздухозаборную щель постоянной площади, являющуюся стартовым впускным устройством, расположенную в верхней точке аэродинамического профиля; воздушные потоки из впускных устройств соединяются в зоне коллектора горючего, а образующиеся в камере смешения продукты сгорания истекают через щелевое сопло, размещаемое на верхней поверхности крыла между стартовым впускным устройством и задней кромкой крыла.
Частично устраняя отрицательные качества рассмотренного аналога, такой летательный аппарат имеет свои недостатки, а именно:
- для поддержания саморегулирующегося рабочего цикла требуется тщательная резонансная настройка системы каналов, образующих нестационарный эжектор;
- высокая заметность летательного аппарата в инфракрасном и акустическом диапазонах, вследствие истечения через щелевое сопло нестационарной струи продуктов сгорания;
- на стадии взлета и посадки, так и при выполнении горизонтального полета имеется возможность управлять лишь по каналу тангажа.
Более удачно проблема создания управляющих сил и моментов для вертикально взлетающих летательных аппаратов, решается в различных мультикоптерах.
Наиболее близко к предлагаемому изобретению относится мультикоптер с линейным расположением винтомоторных групп (патент РФ №2577822 от 20.03.2016, В64С 27/08), выбранный в качестве прототипа.
Такой мультикоптер с линейным расположением винтомоторных групп, расположенных линиями, вытянутых вдоль направления полета, содержит платформу винтомоторных групп из продольных силовых балок - лонжеронов, расположенных вдоль полета, к которым крепятся поперечные силовые балки, на оконечностях которых устанавливаются электромоторы с несущими воздушными винтами, по одному на оконечностях каждой поперечной балки, снизу к платформе винтомоторных групп прикрепляется грузопассажирская кабина с пакетами аккумуляторов, при этом количество винтомоторных установок должно обеспечивать грузоподъемность мультикоптера в вариантах воздушного робота, воздушного мотоцикла, микроавтомобиля, грузотакси, автобуса, боевой машины пехоты и пр., но не менее 9 пар (18 винтомоторных групп) для надежности аварийной посадки при отказе до 4-х электродвигателей одновременно.
Управление полетом принципиально происходит так же, как при радиальном расположении винтомоторных групп (ВМГ). При увеличении оборотов задних ВМГ и уменьшении на передних мультикоптер движется вперед. При манипулировании левой и правой группами мультикоптер будет двигаться вправо или влево. Особое программное управление винтами позволяет разворачивать ЛА, менять курс, менять скорость и высоту. Бортовой навигационно-пилотажный комплекс позволяет данному летательному аппарату выполнять полет по программе, а так же управлять автопилотом вручную как с земли, так и с борта этого летательного аппарата.
Частично устраняя отрицательные качества рассмотренных аналогов, такой летательный аппарат имеет свои недостатки, а именно:
- в сравнении с крылатым летательным аппаратом при одинаковой скорости и полетном весе мощность двигателей должна быть в два раза больше;
- аварийная посадка в режиме авторотации, в отличие от вертолета, невозможна;
- большое количество ВМГ снижает надежность летательного аппарата.
Задачей изобретения является устранение указанных недостатков и создание летательного аппарата короткого взлета и посадки с газодинамическим управлением, обладающего высокой экономичностью и надежностью.
Поставленная цель достигается за счет того, что в летательном аппарате короткого взлета и посадки, с двигательными установками, размещенными внутри крыла аэродинамического сечения с верхней выпуклой поверхностью в каналах, связывающих воздухозаборники постоянной площади, являющиеся впускными устройствами, и щелевые сопла, размещенные на верхней поверхности крыла между впускными устройствами и задней кромкой профиля; причем впускные устройства постоянной площади могут быть расположены в произвольной области верхней выпуклой поверхности аэродинамического профиля между передней кромкой профиля и его верхней точкой, для создания управляющих сил и моментов двигательные установки, размещены в двух группах, расположенных поперечно направлению полета, с равномерной диспозицией относительно продольной оси летательного аппарата в составе каждой группы и возможностью независимо друг от друга изменять силу тяги. Расстояние двигательных установок от продольной оси летательного аппарата различно в разных группах. В качестве двигательных установок могут быть использованы турбореактивные двигатели, импеллеры с высокооборотными электродвигателями или импеллеры с приводом от поршневого ДВС. Толщина крыла по его размаху может быть переменной.
Совокупность упомянутых признаков решает задачу короткого взлета и посадки, позволяет упростить конструкцию летательного аппарата, повысить его экономичность и надежность, повысить эффективность управления летательным аппаратом.
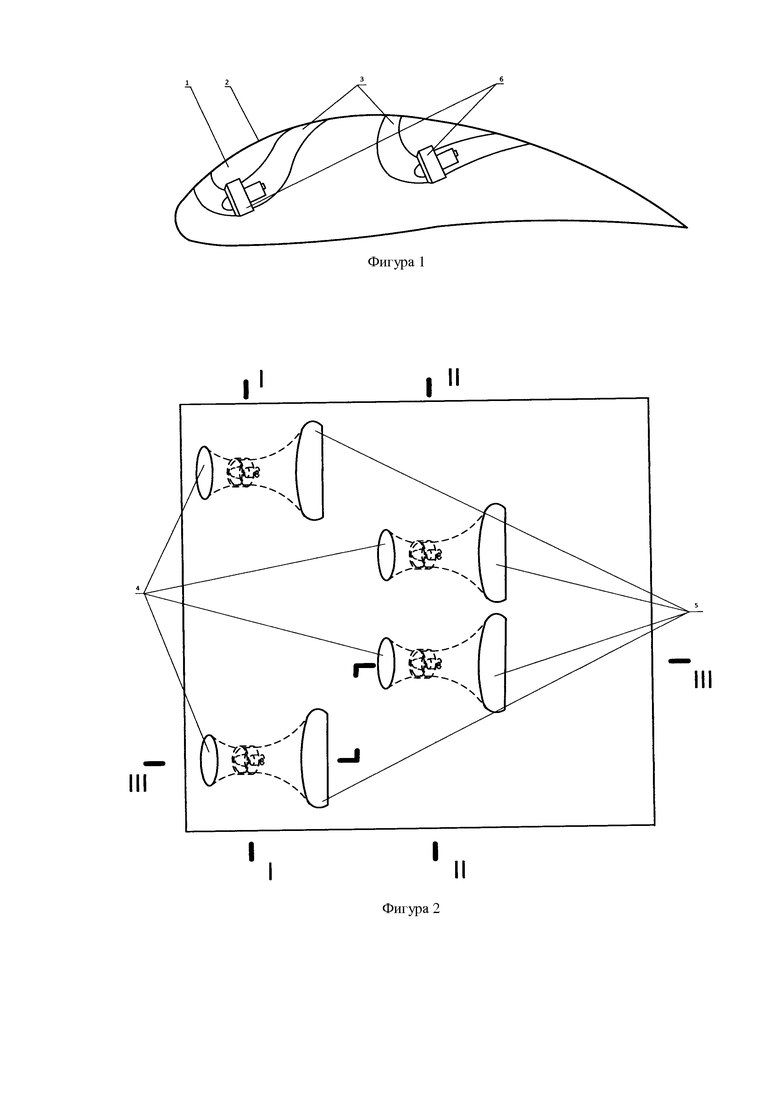
Изобретение иллюстрируется чертежами (фиг. 1), на котором изображен продольный разрез летательного аппарата по каналам двигательных установок (ДУ) (III-III) и (фиг. 2), на котором изображен вид сверху на летательный аппарат, а также схемой формирования управляющих сил и моментов (фиг. 3, 4 и 5). На чертежах представлен вариант с четырьмя двигательными установками в виде импеллеров с высокооборотными электродвигателями, установленными в двух группах.
Летательный аппарат по п. 1 содержит крыло аэродинамического сечения 1 с верхней выпуклой поверхностью 2, внутри которого имеются каналы 3, связывающие впускные устройства постоянной площади 4, размещенные на верхней поверхности аэродинамического профиля, со щелевыми соплами 5, а внутри каждого из каналов 3 размещена импеллерная двигательная установка с высокооборотным электродвигателем 6. Двигательные установки размещены в двух группах (I-I и II-II), расположенных поперечно направлению полета летательного аппарата.
Летательный аппарат работает следующим образом. Воздух из окружающей среды поступает, вследствие вынужденной конвекции, через впускные устройства 4 по каналам 3 к импеллерным двигательным установкам с высокооборотными электродвигателями 6, разгоняется импеллерами до скорости 60-80 м/с и истекает через щелевые сопла 5 на верхнюю выпуклую поверхность 2 крыла 1, прилипая к ней под действием эффекта Коанда. Стекающая с крыла струя создает эффект повышения циркуляции вокруг профиля вследствие вовлечения окружающего воздуха в движение. Вертикальная составляющая силы тяги Y превышает горизонтальную составляющую Р. Одновременное действие вертикальной и горизонтальной составляющих силы тяги приводит к короткому взлету аппарата с места. После того, как летательный аппарат наберет требуемую высоту, обороты импеллеров синхронно уменьшаются до момента уравновешивания подъемной силы и веса летательного аппарата, после чего он переходит от стадии взлета к стадии горизонтального полета.
При превышении оборотов импеллеров передней группы (I-I) над оборотами импеллеров задней группы (II-II), и, соответственно, при большем значении скорости истечения воздуха через щелевые сопла, давление на верхней поверхности крыла падает, а подъемная сила крыла в районе размещения импеллеров передней группы увеличивается («Аэродинамика и динамика полета маневренных самолетов», под ред. Проф. Н.М.Лысенко, Москва, Военное издательство, 1984, с. 50).
Продольное и поперечное распределение этих областей давления относительно центра масс обусловливают, таким образом, возможность непосредственного управления подъемной силой, а так же моментами рыскания и крена. В зависимости от аэродинамических характеристик крыла, конфигурации летательного аппарата и кинематических характеристик его движения, которые определяются при проектировании конкретного летательного аппарата, можно обеспечить управляющий момент по каналу тангажа.
Управляющие моменты по каналам крена и рыскания создаются одновременно за счет изменения оборотов импеллеров, независимо друг от друга. Это позволяет получить различную по величине горизонтальную составляющую силы тяги по размаху крыла, что одновременно приводит к появлению управляющего момента по каналу рыскания, и различную по величине подъемную силу по размаху крыла, что обеспечивает управляющий момент по каналу крена.
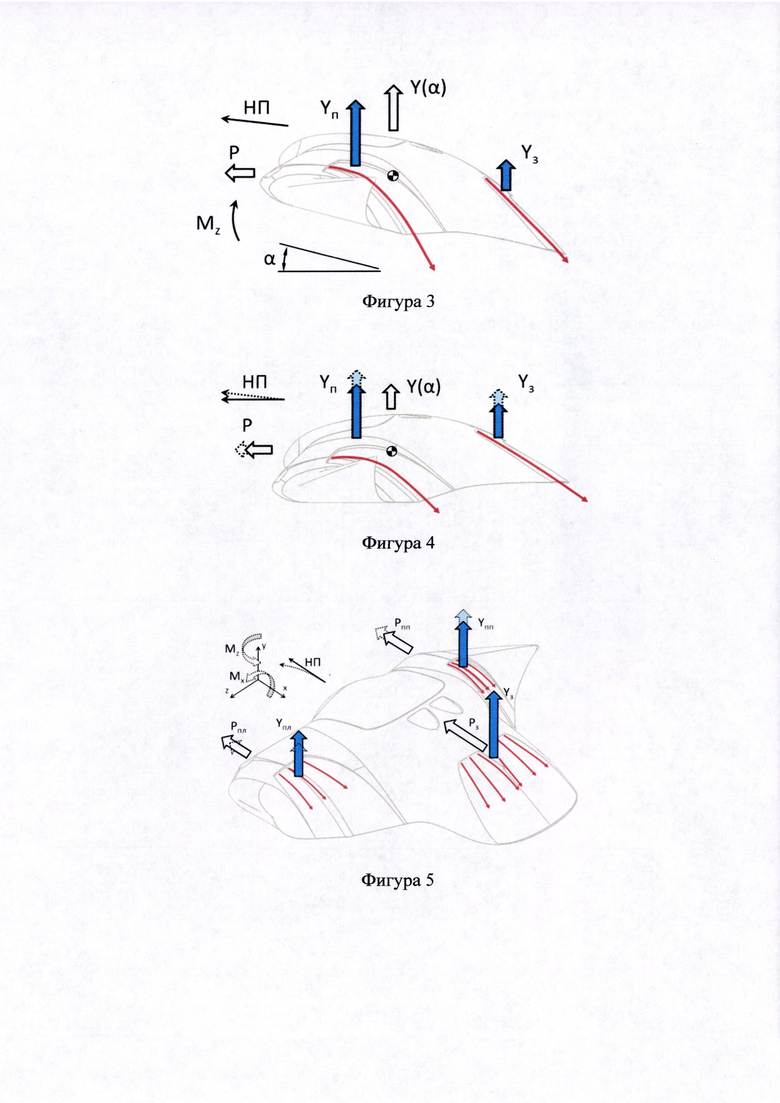
На схемах (фиг. 3, 4 и 5) показаны изменения управляющих сил и моментов для летательного аппарата с переменной толщиной по размаху крыла. Импеллеры передней группы располагаются на большем расстоянии от продольной оси летательного аппарата, чем импеллеры задней группы. Переменная толщина крыла по его размаху позволяет более удобно размещать двигательные установки в крыле.
На схеме (фиг. 3), в случае увеличения оборотов передней группы импеллеров, и, следовательно, уменьшения давления на верхней поверхности крыла, подъемная сила в этой зоне крыла  превышает подъемную силу крыла в области размещения задней группы импеллеров Yз. На схеме (фиг. 4) показано пропорциональное изменение оборотов импеллеров передней и задней групп, приводящее к уменьшению подъемной силы крыла
превышает подъемную силу крыла в области размещения задней группы импеллеров Yз. На схеме (фиг. 4) показано пропорциональное изменение оборотов импеллеров передней и задней групп, приводящее к уменьшению подъемной силы крыла  и увеличению подъемной силы Yз. Точка приложения подъемной силы Y и величина соответствующего момента зависит, прежде всего, от формы аэродинамического профиля крыла и скорости истечения через щелевые сопла. При увеличении скорости истечения точка приложения Y перемещается ближе к срезу щелевого сопла (Г.М. Цейтлин, М.И. Сольц, Е.В. Гладких «Аэродинамика и динамика полета реактивного самолета», Москва, Военное издательство МО СССР, 1964, с. 117).
и увеличению подъемной силы Yз. Точка приложения подъемной силы Y и величина соответствующего момента зависит, прежде всего, от формы аэродинамического профиля крыла и скорости истечения через щелевые сопла. При увеличении скорости истечения точка приложения Y перемещается ближе к срезу щелевого сопла (Г.М. Цейтлин, М.И. Сольц, Е.В. Гладких «Аэродинамика и динамика полета реактивного самолета», Москва, Военное издательство МО СССР, 1964, с. 117).
На схеме (фиг. 5) показано увеличение оборотов правого (по направлению полета) импеллера переднего ряда и уменьшение оборотов левого импеллера того же ряда. Это приводит к увеличению подъемной силы крыла на правой плоскости  и уменьшению подъемной силы
и уменьшению подъемной силы  на левой плоскости, что изменяет продольные составляющие сил
на левой плоскости, что изменяет продольные составляющие сил  (справа) и
(справа) и  (слева) и, аналогично тому, как это происходит на летательных аппаратах, имеющих совмещенные рули направления и высоты в составе V-образного оперения (самолеты Beechcraft Bonanza, Fouga СМ. 170 Magister, Lockheed F-117 Nighthawk), одновременно образует управляющие моменты по каналу рыскания - Мz и каналу крена Мх. в результате летательный аппарат совершает левый вираж. При выравнивании оборотов левого и правого импеллеров величина подъемной силы крыла на правой
(слева) и, аналогично тому, как это происходит на летательных аппаратах, имеющих совмещенные рули направления и высоты в составе V-образного оперения (самолеты Beechcraft Bonanza, Fouga СМ. 170 Magister, Lockheed F-117 Nighthawk), одновременно образует управляющие моменты по каналу рыскания - Мz и каналу крена Мх. в результате летательный аппарат совершает левый вираж. При выравнивании оборотов левого и правого импеллеров величина подъемной силы крыла на правой  и левой
и левой  плоскостях будут одинаковыми, продольные составляющие сил
плоскостях будут одинаковыми, продольные составляющие сил  и
и  также становятся одинаковыми и летательный аппарат будет совершать прямолинейный полет.
также становятся одинаковыми и летательный аппарат будет совершать прямолинейный полет.
Равномерное уменьшение оборотов всех импеллеров с уменьшением величины подъемной силы аппарата менее веса летательного аппарата переводит его в наклонную траекторию снижения.
Летательный аппарат, выполненный по самолетной схеме, без несущих винтов, обладает меньшей мощностью двигательной установки при одинаковых взлетной массе и скорости полета, или же, большей скоростью полета. Отсутствие рулевых поверхностей и поворотных ВМГ упрощает конструкцию летательного аппарата и его надежность. При выходе из строя двигательных установок летательный аппарат может планировать и совершать посадку. Взаимодействие верхней выпуклой поверхности крыла с холодными струями воздуха, истекающими через щелевые сопла (в случае применения в качестве двигательных установок импеллеров), позволяет выполнить их из легких материалов, что благоприятно скажется на экономичности летательного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Летательный аппарат короткого взлета и посадки с газодинамическим управлением | 2018 |
|
RU2711760C2 |
| СПОСОБ СОЗДАНИЯ СИСТЕМЫ СИЛ ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ И ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2531432C2 |
| ПУЛЬСИРУЮЩИЙ ВОЗДУШНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2005 |
|
RU2300004C2 |
| БЕСПИЛОТНЫЙ КОНВЕРТОПЛАН КРИШТОПА (БКК), СПОСОБ ФУНКЦИОНИРОВАНИЯ БКК И СПОСОБ ФУНКЦИОНИРОВАНИЯ УСТРОЙСТВА ВЕРТИКАЛЬНОГО ЗАПУСКА ПРИ ИСПОЛЬЗОВАНИИ С БКК | 2022 |
|
RU2809067C1 |
| СПОСОБ УВЕЛИЧЕНИЯ СИЛЫ ТЯГИ ПУЛЬСИРУЮЩЕГО ВОЗДУШНО-РЕАКТИВНОГО ДВИГАТЕЛЯ ВЕРТИКАЛЬНОГО ВЗЛЕТА (ВАРИАНТЫ) | 2006 |
|
RU2333378C2 |
| Летательный аппарат вертикального взлета и посадки с дополнительными грузовыми модулями и выдвигаемыми воздушными винтами | 2021 |
|
RU2759061C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С ВОЗДУШНЫМИ ВИНТАМИ НА ПОВОРОТНЫХ ЗАКРЫЛКАХ КРЫЛА | 2021 |
|
RU2757693C1 |
| ПУЛЬСИРУЮЩИЙ ВОЗДУШНО-РЕАКТИВНЫЙ ДЕТОНАЦИОННЫЙ ДВИГАТЕЛЬ | 2010 |
|
RU2443893C1 |
| Способ двухконтурной продувки пульсирующего воздушно-реактивного двигателя и двухконтурный пульсирующий воздушно-реактивный двигатель | 2015 |
|
RU2608427C1 |
| ПУЛЬСИРУЮЩИЙ ВОЗДУШНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ (ПуВРД) | 2011 |
|
RU2468235C1 |
Изобретение относится к области авиации, а именно к конструкциям летательных аппаратов короткого взлета и посадки. Летательный аппарат содержит крыло аэродинамического сечения с верхней выпуклой поверхностью. Двигательные установки размещены в каналах, связывающих воздухозаборники постоянной площади и щелевые сопла, размещаемые на верхней поверхности крыла между впускным устройством и задней кромкой профиля. Впускные устройства постоянной площади могут быть размещены в произвольной области верхней выпуклой поверхности аэродинамического профиля между передней кромкой профиля и его верхней точкой. Для создания управляющих сил и моментов двигательные установки размещены в двух группах, расположенных поперечно направлению полёта, с равномерной диспозицией относительно продольной оси летательного аппарата в составе каждой группы и возможностью независимо друг от друга изменять силу тяги. Достигается повышение экономичности летательного аппарата и его надёжности, эффективности управления, упрощение конструкции. 3 з.п. ф-лы, 5 ил.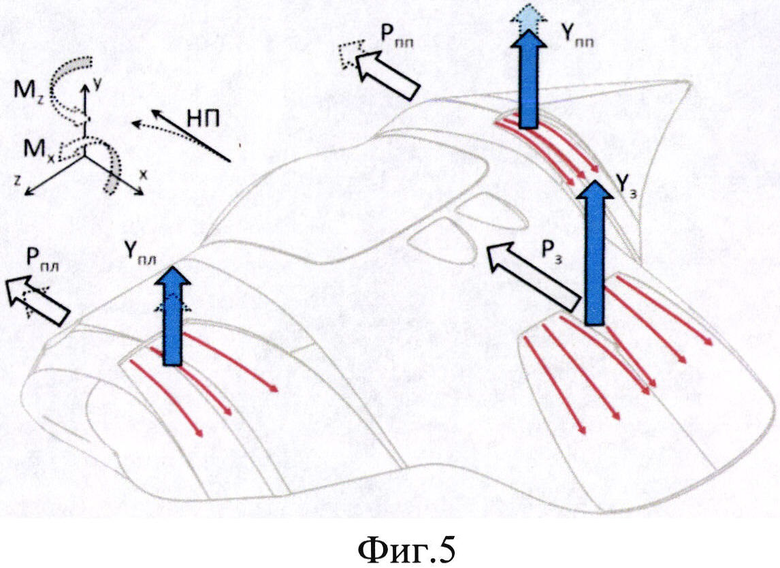
1. Летательный аппарат короткого взлета и посадки с газодинамическим управлением с продольным расположением двигательных установок, размещенных внутри крыла аэродинамического сечения с верхней выпуклой поверхностью в каналах, связывающих воздухозаборники постоянной площади, являющиеся впускными устройствами, и щелевые сопла, размещаемые на верхней поверхности крыла между впускными устройствами и задней кромкой профиля; причем впускные устройства постоянной площади могут быть размещены в произвольной области верхней выпуклой поверхности аэродинамического профиля между передней кромкой профиля и его верхней точкой, отличающийся тем, что двигательные установки размещены в двух группах, расположенных поперечно направлению полета, с равномерной диспозицией относительно продольной оси летательного аппарата в составе каждой группы и возможностью независимо друг от друга изменять силу тяги.
2. Летательный аппарат короткого взлета и посадки с газодинамическим управлением по п. 1, отличающийся тем, что расстояние двигательных установок от продольной оси летательного аппарата различно в разных группах.
3. Летательный аппарат короткого взлета и посадки с газодинамическим управлением по пп. 1, 2, отличающийся тем, что в качестве двигательных установок могут быть использованы турбореактивные двигатели, импеллеры с высокооборотными электродвигателями или импеллеры с приводом от поршневого ДВС.
4. Летательный аппарат короткого взлета и посадки с газодинамическим управлением по пп. 1, 2, 3, отличающийся тем, что толщина крыла по его размаху может быть переменной.
| СПОСОБ СОЗДАНИЯ СИСТЕМЫ СИЛ ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ И ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2531432C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ, СИСТЕМА УПРАВЛЕНИЯ ОТСОСОМ ПОГРАНИЧНОГО СЛОЯ, СИСТЕМА УПРАВЛЕНИЯ ВДУВОМ В ПОГРАНИЧНЫЙ СЛОЙ, УСТРОЙСТВО ФИКСАЦИИ ПОЛОЖЕНИЯ СХОДА ПОТОКА С ЗАДНЕЙ КРОМКИ ФЮЗЕЛЯЖА И ЕГО ВЗЛЕТНО-ПОСАДОЧНОЕ УСТРОЙСТВО НА ВОЗДУШНОЙ ПОДУШКЕ | 1992 |
|
RU2033945C1 |
| US 3361386 A1, 02.01.1968 | |||
| WO 2008029095 A1, 13.03.2008 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ ТОНКОПЛЕНОЧНЫХ РЕЗИСТОРОВ | 2014 |
|
RU2568812C1 |

