Изобретение относится к области радиолокации и может быть использовано для распознавания в импульсно-доплеровской радиолокационной станции (РЛС) типа самолета с турбореактивным двигателем (ТРД).
Известен способ функционирования импульсно-доплеровской РЛС, заключающийся в формировании высокочастотной последовательности зондирующих импульсов, их усилении по мощности, излучении в пространство, приеме, усилении, преобразовании отраженных сигналов на промежуточные частоты, их селекции по дальности и доплеровской частоте, преобразовании сигналов в цифровую форму с последующем их спектральным анализом [1].
Недостатком данного способа функционирования импульсно-доплеровской РЛС являются его ограниченные функциональные возможности, не позволяющие распознать тип самолета с ТРД.
Известен способ распознавания типа самолета с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции, заключающийся в том, что радиолокационный (РЛ) сигнал, отраженный от самолета с турбореактивным двигателем, подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье (БПФ) и преобразуется в амплитудно-частотный спектр (АЧС), спектральные составляющие которого обусловлены отражениями сигнала от планера самолета с турбореактивным двигателем и вращающихся лопаток рабочего колеса компрессора низкого давления (КНД) его силовой установки, путем пороговой обработки амплитудно-частотного спектра сигнала формируют только те отсчеты доплеровских частот Fi с соответствующими амплитудами спектральных составляющих, которые превысили установленный порог, где  N - общее количество отсчетов доплеровских частот, на частотных позициях которых амплитуды спектральных составляющих превысили установленный порог, за время Т каждого обзора пространства измеряют два значения дальности Д1 и Д2 до самолета с турбореактивным двигателем, по измеренным значениям дальности Д1 и Д2 предварительно вычисляют частотную позицию доплеровской частоты
N - общее количество отсчетов доплеровских частот, на частотных позициях которых амплитуды спектральных составляющих превысили установленный порог, за время Т каждого обзора пространства измеряют два значения дальности Д1 и Д2 до самолета с турбореактивным двигателем, по измеренным значениям дальности Д1 и Д2 предварительно вычисляют частотную позицию доплеровской частоты  обусловленную скоростью сближения носителя импульсно-доплеровской радиолокационной станции с планером самолета с турбореактивным двигателем, как
обусловленную скоростью сближения носителя импульсно-доплеровской радиолокационной станции с планером самолета с турбореактивным двигателем, как  где λ - рабочая длина волны импульсно-доплеровской радиолокационной станции, в амплитудно-частотном спектре сигнала определяют ближайшее к предварительно вычисленной частотной позиции доплеровской частоты
где λ - рабочая длина волны импульсно-доплеровской радиолокационной станции, в амплитудно-частотном спектре сигнала определяют ближайшее к предварительно вычисленной частотной позиции доплеровской частоты  значение доплеровской частоты
значение доплеровской частоты  с соответствующей амплитудой
с соответствующей амплитудой  спектральной составляющей, превысившей установленный порог, которое окончательно определяет доплеровскую частоту сигнала Fп в его амплитудно-частотном спектре, обусловленную скоростью сближения носителя импульсно-доплеровской радиолокационной станции с планером самолета с турбореактивным двигателем, определяют в амплитудно-частотном спектре сигнала позицию доплеровской частоты
спектральной составляющей, превысившей установленный порог, которое окончательно определяет доплеровскую частоту сигнала Fп в его амплитудно-частотном спектре, обусловленную скоростью сближения носителя импульсно-доплеровской радиолокационной станции с планером самолета с турбореактивным двигателем, определяют в амплитудно-частотном спектре сигнала позицию доплеровской частоты  где j = 1,…, (i - 1), (i + 1),…, N, на которой находится спектральная составляющая, превысившая установленный порог и имеющая максимальную амплитуду Aj, j = 1,…,(i - 1), (i + 1),…, N, которая соответствует значению доплеровской частоты Fк, обусловленной скоростью сближения носителя импульсно-доплеровской радиолокационной станции с вращающимися лопатками первой ступени компрессора низкого давления силовой установки самолета с турбореактивным двигателем, вычисляют разность доплеровских частот
где j = 1,…, (i - 1), (i + 1),…, N, на которой находится спектральная составляющая, превысившая установленный порог и имеющая максимальную амплитуду Aj, j = 1,…,(i - 1), (i + 1),…, N, которая соответствует значению доплеровской частоты Fк, обусловленной скоростью сближения носителя импульсно-доплеровской радиолокационной станции с вращающимися лопатками первой ступени компрессора низкого давления силовой установки самолета с турбореактивным двигателем, вычисляют разность доплеровских частот  за время Т каждого обзора пространства измеряют значения бортовых пеленгов
за время Т каждого обзора пространства измеряют значения бортовых пеленгов  азимута и
азимута и  угла места, по измеренным значениям бортовых пеленгов
угла места, по измеренным значениям бортовых пеленгов  и средней дальности Д, определяемой, как Д = (Д1 + Д2) / 2, вычисляют высоту полета самолета с турбореактивным двигателем в соответствии с выражением
и средней дальности Д, определяемой, как Д = (Д1 + Д2) / 2, вычисляют высоту полета самолета с турбореактивным двигателем в соответствии с выражением

где  - высота полета самолета-носителя радиолокационной станции;
- высота полета самолета-носителя радиолокационной станции;  - поправка высоты, учитывающая рефракцию радиоволн; RЭ - эквивалентный радиус Земли (при нормальной рефракции радиоволн RЭ = 8500 км);
- поправка высоты, учитывающая рефракцию радиоволн; RЭ - эквивалентный радиус Земли (при нормальной рефракции радиоволн RЭ = 8500 км);  - высота полета самолета с турбореактивным двигателем относительно высоты полета самолета-носителя радиолокационной станции, для каждой высоты Н полета самолета с турбореактивным двигателем, где
- высота полета самолета с турбореактивным двигателем относительно высоты полета самолета-носителя радиолокационной станции, для каждой высоты Н полета самолета с турбореактивным двигателем, где 
 - минимальная и максимальная высоты полета самолета с турбореактивным двигателем, диапазон разностей
- минимальная и максимальная высоты полета самолета с турбореактивным двигателем, диапазон разностей  априорно разбивают на Q неперекрывающихся поддиапазонов, нижняя
априорно разбивают на Q неперекрывающихся поддиапазонов, нижняя  и верхняя
и верхняя  границы каждого q-го поддиапазона,
границы каждого q-го поддиапазона,  соответствующего q-му типу цели и высоте Н полета самолета с турбореактивным двигателем, определяются выражениями
соответствующего q-му типу цели и высоте Н полета самолета с турбореактивным двигателем, определяются выражениями

где FP - максимальная частота вращения ротора компрессора низкого давления силовой установки q-го типа самолета с турбореактивным двигателем; n1 и n2 - соответственно минимальное и максимальное значение величины относительных оборотов вращения ротора силовой установки, соответствующие высоте Н полета, одинаковые для всех типов самолетов с турбореактивным двигателем; Z - количество лопаток рабочего колеса первой ступени компрессора низкого давления силовой установки самолета с турбореактивным двигателем q-го типа, при попадании разности доплеровских частот  в q-й поддиапазон принимают решение о q-м типе самолета с турбореактивным двигателем [2].
в q-й поддиапазон принимают решение о q-м типе самолета с турбореактивным двигателем [2].
Недостатком данного способа является низкая достоверность распознавания типа самолета с ТРД в импульсно-доплеровской РЛС. Это обусловлено тем, что данный способ распознавания справедлив лишь при выполнении условия, что значение величины относительных оборотов вращения ротора КНД силовой установки самолета с ТРД, тип которого подлежит распознаванию, зависящее от высоты полета Н, а следовательно и значение  вычисленной разности доплеровских частот находится в пределах нижней FH и верхней FB границ априорного диапазона разностей
вычисленной разности доплеровских частот находится в пределах нижней FH и верхней FB границ априорного диапазона разностей  В противном случае (при несоответствии значения
В противном случае (при несоответствии значения  вычисленной разности доплеровских частот его априорному диапазону разностей ΔFпк) тип самолета с ТРД не будет правильно распознан.
вычисленной разности доплеровских частот его априорному диапазону разностей ΔFпк) тип самолета с ТРД не будет правильно распознан.
Действительно, на основе анализа результатов экспериментальных исследований по регистрации с линейного выхода приемника импульсно-доплеровской РЛС воздушного базирования РЛ сигналов в сантиметровом диапазоне волн, отраженных от различных типов самолетов с ТРД, и их обработке с целью получения АЧС зарегистрированных реальных РЛ сигналов путем применения узкополосной доплеровской фильтрации на основе процедуры БПФ, установлено, что значения разности доплеровских частот  полученные в результате обработки зарегистрированных РЛ сигналов, отраженных от одного и того же типа самолета с ТРД, выполняющего полет на разных высотах с разными скоростями, при прочих равных условиях различны. При этом установлена следующая зависимость: значения разности доплеровских частот
полученные в результате обработки зарегистрированных РЛ сигналов, отраженных от одного и того же типа самолета с ТРД, выполняющего полет на разных высотах с разными скоростями, при прочих равных условиях различны. При этом установлена следующая зависимость: значения разности доплеровских частот  увеличиваются с ростом высоты и скорости полета (таблица 1), т.е. на основании выражений (2) и (3) следует вывод об увеличении величины относительных оборотов вращения ротора КНД силовой установки с ростом не только высоты, но и скорости полета на конкретной высоте [3, 4].
увеличиваются с ростом высоты и скорости полета (таблица 1), т.е. на основании выражений (2) и (3) следует вывод об увеличении величины относительных оборотов вращения ротора КНД силовой установки с ростом не только высоты, но и скорости полета на конкретной высоте [3, 4].
Цель изобретения - повышение достоверности распознавания типа самолета с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции при его полете на различных высотах и скоростях.
С этой целью, в способ распознавания типа самолета с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции, заключающимся в том, что радиолокационный сигнал, отраженный от самолета с турбореактивным двигателем, подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье и преобразуется в амплитудно-частотный спектр, спектральные составляющие которого обусловлены отражениями сигнала от планера самолета с турбореактивным двигателем и вращающихся лопаток рабочего колеса компрессора низкого давления его силовой установки, путем пороговой обработки амплитудно-частотного спектра сигнала формируют только те отсчеты доплеровских частот Fi с соответствующими амплитудами спектральных составляющих, которые превысили установленный порог, где  N - общее количество отсчетов доплеровских частот, на частотных позициях которых амплитуды спектральных составляющих превысили установленный порог, за время Т каждого обзора пространства измеряют два значения дальности Д1 и Д2 до самолета с турбореактивным двигателем, по измеренным значениям дальности Д1 и Д2 предварительно вычисляют частотную позицию доплеровской частоты
N - общее количество отсчетов доплеровских частот, на частотных позициях которых амплитуды спектральных составляющих превысили установленный порог, за время Т каждого обзора пространства измеряют два значения дальности Д1 и Д2 до самолета с турбореактивным двигателем, по измеренным значениям дальности Д1 и Д2 предварительно вычисляют частотную позицию доплеровской частоты  обусловленную скоростью сближения носителя импульсно-доплеровской радиолокационной станции с планером самолета с турбореактивным двигателем, как
обусловленную скоростью сближения носителя импульсно-доплеровской радиолокационной станции с планером самолета с турбореактивным двигателем, как  где λ - рабочая длина волны импульсно-доплеровской радиолокационной станции, в амплитудно-частотном спектре сигнала определяют ближайшее к предварительно вычисленной частотной позиции доплеровской частоты
где λ - рабочая длина волны импульсно-доплеровской радиолокационной станции, в амплитудно-частотном спектре сигнала определяют ближайшее к предварительно вычисленной частотной позиции доплеровской частоты  значение доплеровской частоты
значение доплеровской частоты  с соответствующей амплитудой
с соответствующей амплитудой  спектральной составляющей, превысившей установленный порог, которое окончательно определяет доплеровскую частоту сигнала Fп в его амплитудно-частотном спектре, обусловленную скоростью сближения носителя импульсно-доплеровской радиолокационной станции с планером самолета с турбореактивным двигателем, определяют в амплитудно-частотном спектре сигнала позицию доплеровской частоты
спектральной составляющей, превысившей установленный порог, которое окончательно определяет доплеровскую частоту сигнала Fп в его амплитудно-частотном спектре, обусловленную скоростью сближения носителя импульсно-доплеровской радиолокационной станции с планером самолета с турбореактивным двигателем, определяют в амплитудно-частотном спектре сигнала позицию доплеровской частоты  где j = 1,…, (i - 1), (i+1),…, N, на которой находится спектральная составляющая, превысившая установленный порог и имеющая максимальную амплитуду Aj, j = 1,…, (i - 1), (i+1),…, N, которая соответствует значению доплеровской частоты Fk, обусловленной скоростью сближения носителя импульсно-доплеровской радиолокационной станции с вращающимися лопатками первой ступени компрессора низкого давления силовой установки самолета с турбореактивным двигателем, вычисляют разность доплеровских частот
где j = 1,…, (i - 1), (i+1),…, N, на которой находится спектральная составляющая, превысившая установленный порог и имеющая максимальную амплитуду Aj, j = 1,…, (i - 1), (i+1),…, N, которая соответствует значению доплеровской частоты Fk, обусловленной скоростью сближения носителя импульсно-доплеровской радиолокационной станции с вращающимися лопатками первой ступени компрессора низкого давления силовой установки самолета с турбореактивным двигателем, вычисляют разность доплеровских частот  за время Т каждого обзора пространства измеряют значения бортовых пеленгов
за время Т каждого обзора пространства измеряют значения бортовых пеленгов  азимута и
азимута и  угла места, по измеренным значениям бортовых пеленгов
угла места, по измеренным значениям бортовых пеленгов  и средней дальности Д, определяемой, как Д = (Д1 + Д2) / 2, вычисляют высоту полета самолета с турбореактивным двигателем в соответствии с выражением
и средней дальности Д, определяемой, как Д = (Д1 + Д2) / 2, вычисляют высоту полета самолета с турбореактивным двигателем в соответствии с выражением

где  - высота полета самолета-носителя радиолокационной станции;
- высота полета самолета-носителя радиолокационной станции;  - поправка высоты, учитывающая рефракцию радиоволн; RЭ - эквивалентный радиус Земли (при нормальной рефракции радиоволн RЭ = 8500 км);
- поправка высоты, учитывающая рефракцию радиоволн; RЭ - эквивалентный радиус Земли (при нормальной рефракции радиоволн RЭ = 8500 км);  - высота полета самолета с турбореактивным двигателем относительно высоты полета самолета-носителя радиолокационной станции, дополнительно вычисляют скорость полета самолета с турбореактивным двигателем в соответствии с выражением
- высота полета самолета с турбореактивным двигателем относительно высоты полета самолета-носителя радиолокационной станции, дополнительно вычисляют скорость полета самолета с турбореактивным двигателем в соответствии с выражением
где α определяется в соответствии с выражением
 где Vc - скорость самолета-носителя БРЛС,
где Vc - скорость самолета-носителя БРЛС,  ϕг = 0,5(ϕг1 + ϕг2).
ϕг = 0,5(ϕг1 + ϕг2).
Для каждой высоты Н и скорости V полета самолета с турбореактивным двигателем, где 
 - минимальная и максимальная высоты полета самолета с турбореактивным двигателем,
- минимальная и максимальная высоты полета самолета с турбореактивным двигателем, 
 - минимальная и максимальная скорость полета самолета с турбореактивным двигателем, диапазон разностей
- минимальная и максимальная скорость полета самолета с турбореактивным двигателем, диапазон разностей  априорно разбивают на Q неперекрывающихся поддиапазонов, нижняя
априорно разбивают на Q неперекрывающихся поддиапазонов, нижняя  и верхняя
и верхняя  границы каждого q-го поддиапазона,
границы каждого q-го поддиапазона,  соответствующего q-му типу цели, высоте Н и скорости V полета самолета с турбореактивным двигателем, определяются выражениями (2), (3), где n1 = n⋅0.98 и n2 = n⋅1.02 -соответственно минимальное и максимальное значение величины относительных оборотов вращения ротора силовой установки, n - значение величины относительных оборотов вращения ротора силовой установки, соответствующее высоте Н и скорости V полета самолета с турбореактивным двигателем, одинаковые для всех их типов, при попадании разности доплеровских частот
соответствующего q-му типу цели, высоте Н и скорости V полета самолета с турбореактивным двигателем, определяются выражениями (2), (3), где n1 = n⋅0.98 и n2 = n⋅1.02 -соответственно минимальное и максимальное значение величины относительных оборотов вращения ротора силовой установки, n - значение величины относительных оборотов вращения ротора силовой установки, соответствующее высоте Н и скорости V полета самолета с турбореактивным двигателем, одинаковые для всех их типов, при попадании разности доплеровских частот  в q-ый поддиапазон принимают решение о q-м типе самолета с турбореактивным двигателем.
в q-ый поддиапазон принимают решение о q-м типе самолета с турбореактивным двигателем.
Новыми признаками, обладающими существенными отличиями, являются.
1. Вычисление высоты и скорости полета самолета с ТРД за время каждого обзора пространства в соответствии с выражениями (4) и (5).
2. Разбиение для каждых априорно фиксированных высоты Н и скорости V полета самолета с ТРД диапазона разностей  на Q неперекрывающихся поддиапазонов, при этом, нижняя
на Q неперекрывающихся поддиапазонов, при этом, нижняя  и верхняя
и верхняя  границы каждого q-го поддиапазона на высоте Н и скорости V полета определяются выражениями (2) и (3).
границы каждого q-го поддиапазона на высоте Н и скорости V полета определяются выражениями (2) и (3).
3. Принятие решения о q-м типе самолета с ТРД, летящем на высоте Н со скоростью V, при попадании разности доплеровских частот  в q-ый априорный поддиапазон.
в q-ый априорный поддиапазон.
Данные признаки обладают существенными отличиями, так как в известных способах не обнаружены.
Применение новых признаков в совокупности с известными позволит повысить достоверность распознавания типа самолета с ТРД в импульсно-доплеровской РЛС при его полете на различных высотах с различными скоростями.
На фигуре 1 приведена блок-схема, поясняющая предлагаемый способ распознавания типа самолета с ТРД в импульсно-доплеровской РЛС, на фигуре 2 (а, б, в), 3 и 4 - эпюры, поясняющие предлагаемый способ распознавания q-го типа самолета с ТРД, летящем на различных высотах.
Предлагаемый способ распознавания типа самолета с ТРД в импульсно-доплеровской РЛС осуществляется следующим образом.
Радиолокационный сигнал S(t), отраженный от самолета с ТРД, с выхода приемника РЛС на промежуточной частоте поступает (фиг.1) на вход блока 1 БПФ, где подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в АЧС S(f) (фиг.2а - отсчеты доплеровских частот F1, F2, F3, F4, F5, F6, F7 с соответствующими амплитудами A1, А2, A3, А4, А5, А6, А7), спектральные составляющие которого обусловлены лены отражениями сигнала от планера самолета с ТРД и вращающихся лопаток рабочего колеса КНД его силовой установки. Данные спектральные составляющие (фиг.1) с соответствующими частотами и амплитудами поступают на формирователь 2 отсчетов, в котором путем пороговой обработки формируются (фиг.2б) только те отсчеты доплеровских частот (F1, F3, F4, F5, F7) с соответствующими амплитудами (A1, A3, А4, А5, А7) спектральных составляющих, которые превысили установленный порог (амплитуды А2 и А6 спектральных составляющих на частотных позициях соответственно F2 и F6 не превысили установленный порог).
За время Т каждого обзора пространства измеренные значения дальности Д1 и Д2 между носителем РЛС и самолетом с ТРД поступают (фиг.1) на вход вычислителя 3, в котором предварительно вычисляется частотная позиция доплеровской частоты  обусловленная скоростью сближения носителя импульсно-доплеровской РЛС с планером самолета с ТРД в соответствии с выражением (1). Это значение доплеровской частоты
обусловленная скоростью сближения носителя импульсно-доплеровской РЛС с планером самолета с ТРД в соответствии с выражением (1). Это значение доплеровской частоты  поступает в формирователь 4 отсчета доплеровской частоты планерной составляющей спектра сигнала (фиг.2б), на другой вход которого с выхода (фиг.1) формирователя 2 отсчетов поступают значения доплеровских отсчетов частот F1, F3, F4, F5, F7 с соответствующими амплитудами A1, A3, А4, А5, А7. В формирователе 4 определяется (фиг.2в) ближайшее к предварительно вычисленной в вычислителе 3 частотной позиции доплеровской частоты F*п значение доплеровской частоты Fi* (фиг.2б, частотная позиция F4) с соответствующей амплитудой Ai* (фиг.2б - амплитуда А4) спектральной составляющей, превысившей установленный порог, которое окончательно и определяет доплеровскую частоту сигнала Fп в его АЧС, обусловленную скоростью сближения носителя импульсно-доплеровской РЛС с планером самолета с ТРД.
поступает в формирователь 4 отсчета доплеровской частоты планерной составляющей спектра сигнала (фиг.2б), на другой вход которого с выхода (фиг.1) формирователя 2 отсчетов поступают значения доплеровских отсчетов частот F1, F3, F4, F5, F7 с соответствующими амплитудами A1, A3, А4, А5, А7. В формирователе 4 определяется (фиг.2в) ближайшее к предварительно вычисленной в вычислителе 3 частотной позиции доплеровской частоты F*п значение доплеровской частоты Fi* (фиг.2б, частотная позиция F4) с соответствующей амплитудой Ai* (фиг.2б - амплитуда А4) спектральной составляющей, превысившей установленный порог, которое окончательно и определяет доплеровскую частоту сигнала Fп в его АЧС, обусловленную скоростью сближения носителя импульсно-доплеровской РЛС с планером самолета с ТРД.
В формирователе 5 (фиг.1), на входы которого также поступают значения частот F1, F3, F4, F5, F7 с соответствующими амплитудами A1, A3, А4, А5, А7 с выхода формирователя 2 отсчетов и значение частотной позиции i=4, соответствующей доплеровской частоте, обусловленной скоростью сближения носителя РЛС с самолетом с ТРД, определяется (без учета 4-й позиции) позиция доплеровской частоты  (j = 1, 3, 5, 7), на которой находится спектральная составляющая, превысившая установленный порог и имеющая максимальную амплитуду Aj (фиг.2б - амплитуда A1 на частотной позиции F1), которая соответствует значению доплеровской частоты Fк (фиг.2в), обусловленной скоростью сближения носителя импульсно-доплеровской РЛС с вращающимися лопатками первой ступени КНД силовой установки самолета с ТРД.
(j = 1, 3, 5, 7), на которой находится спектральная составляющая, превысившая установленный порог и имеющая максимальную амплитуду Aj (фиг.2б - амплитуда A1 на частотной позиции F1), которая соответствует значению доплеровской частоты Fк (фиг.2в), обусловленной скоростью сближения носителя импульсно-доплеровской РЛС с вращающимися лопатками первой ступени КНД силовой установки самолета с ТРД.
В блоке 6 вычитания (фиг.1) вычисляется разность доплеровских частот  (фиг.2в), которая поступает (фиг.1) на вход решающего блока 7.
(фиг.2в), которая поступает (фиг.1) на вход решающего блока 7.
За время Т каждого обзора пространства измеренные значения дальностей Д1 и Д2, азимута ϕг, угла места ϕв, высоты полета НРЛС самолета-носителя РЛС, доплеровской частоты сигнала Fп, а также константа, определяющая значение эквивалентного радиуса Земли RЭ, поступают (фиг.1) на соответствующие входы вычислителя 8, в котором в соответствии с формулой (4) вычисляется высота Н и формулой (5) скорость V полета самолета с ТРД. Это значение высоты Н и скорости V поступает в формирователь 9, где хранятся априорно разбитые на Q неперекрывающихся поддиапазонов разности  для каждой высоты Н и скорости V полета самолета с ТРД (фиг.3). При этом, нижняя и верхняя границы каждого q-го поддиапазона, соответствующего q-му типу цели при его полете на высоте Н со скоростью V, определяются выражениями (2) и (3).
для каждой высоты Н и скорости V полета самолета с ТРД (фиг.3). При этом, нижняя и верхняя границы каждого q-го поддиапазона, соответствующего q-му типу цели при его полете на высоте Н со скоростью V, определяются выражениями (2) и (3).
В формирователе 9 из всей совокупности априорно разбитых на Q неперекрывающихся поддиапазонов разности ΔFпк для различных высот и скоростей полета самолета с ТРД выбирается только один, соответствующий вычисленным в вычислителе 8 значениям высоты Н и скорости V полета самолета с ТРД. Значения границ выбранных поддиапазонов и поступают на вход решающего блока 7 (фиг.1).
В решающем блоке 7 на основе анализа (фиг.4) попадания вычисленной разности доплеровских частот  в q-ый поддиапазон принимается решение о q-м типе самолета с ТРД.
в q-ый поддиапазон принимается решение о q-м типе самолета с ТРД.
Для оценки работоспособности предлагаемого способа было проведено его имитационное моделирование. На вход блока 1 БПФ подавался на промежуточной частоте зарегистрированный в сантиметровом диапазоне волн с линейного выхода приемника импульсно-доплеровской РЛС воздушного базирования РЛ сигнал, отраженный от отечественного самолета с ТРД, выполняющего полет на различных высотах и скоростях. Процедура БПФ осуществлялась при эквивалентной полосе пропускания одного бина алгоритма БПФ, равного порядка 10 Гц. Всего было проанализировано более 1000 АЧС.
В результате имитационного моделирования предлагаемого способа установлено, что с доверительной вероятностью 0,95 оценка математического ожидания вероятности правильного (ложного) распознавания данного типа самолета находится в пределах 0,89-0,93 (10-3-10-4) при различных высотах и скоростях его полета.
Кроме того, установлено, что увеличение ошибки определения высоты и скорости полета самолета с ТРД приводит к уменьшению оценки математического ожидания вероятности правильного распознавания до нуля и росту оценки математического ожидания вероятности ложного распознавания.
Таким образом, применение предлагаемого изобретения позволит повысить достоверность распознавания типа самолета с ТРД в импульсно-доплеровской РЛС при его полете на различных высотах и скоростях.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Авиационные радиолокационные комплексы и системы: учебник для слушателей и курсантов ВУЗов ВВС / П.И. Дудник, Г.С. Кондратенков, Б.Г. Татарский, А.Р. Ильчук, А.А. Герасимов. Под ред. П.И. Дудника. - М.: изд. ВВИА им. проф. Н.Е. Жуковского, 2006, страницы 639-641, рисунок 12.39 (аналог).
2. Способ распознавания типа самолета с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции. Патент на изобретение №2731878, 2020 (прототип).
3. Автоматика управления авиационными двигателями: учебно-методическое пособие в 3 частях. Часть 2. Автоматические ограничители параметров двигателей, автоматизация процессов запуска и приемистости двигателя / сост.: А.И. Сидунов, Н.И. Пучко. - Минск: МГВАК, 2012. - 83 с, страницы 16, 36.
4. Двигатель Д-30КП-2. Инструкция по технической эксплуатации. - М.: ОАО «НПО «Сатурн», 2001, Приложение 1, страница 7, Дополнение (к приложению 1), страница 27.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПОЗНАВАНИЯ ТИПА САМОЛЁТА С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2020 |
|
RU2731878C1 |
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции | 2019 |
|
RU2705070C1 |
| Способ распознавания типа воздушной цели из класса "Самолет с турбореактивным двигателем" на основе нейронной сети | 2023 |
|
RU2826233C1 |
| Способ распознавания типового состава групповой воздушной цели различных классов при различных условиях ее полета на основе калмановской фильтрации и нейронной сети | 2022 |
|
RU2802653C1 |
| Способ многопризнакого распознавания в многофункциональной радиолокационной станции класса летательного аппарата по принципу "самолет с турбореактивным двигателем - самолет с турбовинтовым двигателем - вертолет - ракета - беспилотный летательный аппарат" на основе совместного применения калмановской фильтрации и нейронной сети | 2024 |
|
RU2832712C1 |
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции при воздействии имитирующих помех | 2020 |
|
RU2735314C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЁТ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ" ПРИ ВОЗДЕЙСТВИИ УВОДЯЩЕЙ ПО СКОРОСТИ ПОМЕХИ | 2015 |
|
RU2579353C1 |
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции при воздействии уводящей по скорости помехи | 2019 |
|
RU2732281C1 |
| Способ всеракурсного распознавания типового состава групповой воздушной цели из класса "самолеты с турбореактивными двигателями" на основе калмановской фильтрации и нейронных сетей | 2024 |
|
RU2835772C1 |
| Способ сопровождения в радиолокационной станции групповой воздушной цели из класса "самолёты с турбореактивными двигателями" при воздействии уводящих по скорости помех | 2016 |
|
RU2617110C1 |
Изобретение относится к области радиолокации и может быть использовано для распознавания в импульсно-доплеровской радиолокационной станции (РЛС) типа самолета с турбореактивным двигателем (ТРД). Технический результат заключается в повышении достоверности распознавания типа самолета с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции при его полете на различных высотах и скоростях. В заявленном способе радиолокационный сигнал, отраженный от самолета с ТРД, подвергается узкополосной доплеровской фильтрации и преобразуется в амплитудно-частотный спектр (АЧС), спектральные составляющие которого обусловлены отражениями сигнала от планера самолета с ТРД и вращающихся лопаток рабочего колеса компрессора низкого давления (КНД) его силовой установки. Путем пороговой обработки АЧС сигнала формируют только те отсчеты доплеровских частот Fi с соответствующими амплитудами спектральных составляющих, которые превысили установленный порог. Одновременно за время Т каждого обзора пространства измеряют два значения дальности Д1 и Д2 до самолета с ТРД и вычисляют частотную позицию доплеровской частоты Fп, зависящую от скорости сближения носителя импульсно-доплеровской РЛС с планером самолета с ТРД. Определяют в АЧС позицию сигнала доплеровской частоты с максимальной амплитудой спектральной составляющей, превысившей установленный порог, которая соответствует значению доплеровской частоты Fк, обусловленной скоростью сближения носителя импульсно-доплеровской РЛС с вращающимися лопатками первой ступени КНД силовой установки самолета с ТРД. Вычисляют разность доплеровских частот  За время Т каждого обзора пространства измеряют значения бортовых пеленгов азимута и угла места, по которым, а также по средней дальности Д вычисляют высоту и дополнительно скорость полета самолета с ТРД. Для каждой высоты Н и скорости V полета самолета с ТРД априорный диапазон разностей
За время Т каждого обзора пространства измеряют значения бортовых пеленгов азимута и угла места, по которым, а также по средней дальности Д вычисляют высоту и дополнительно скорость полета самолета с ТРД. Для каждой высоты Н и скорости V полета самолета с ТРД априорный диапазон разностей  разбивают на Q неперекрывающихся поддиапазонов. При попадании разности доплеровских частот
разбивают на Q неперекрывающихся поддиапазонов. При попадании разности доплеровских частот  в q-ый поддиапазон принимают решение о q-м типе самолета с ТРД, летящем на высоте Н со скоростью V. 4 ил., 1 табл.
в q-ый поддиапазон принимают решение о q-м типе самолета с ТРД, летящем на высоте Н со скоростью V. 4 ил., 1 табл.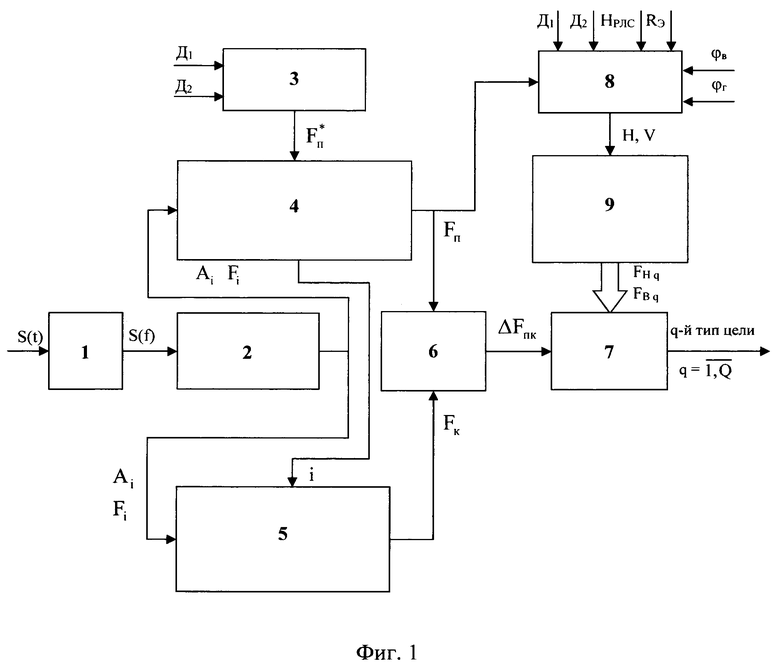
Способ распознавания типа самолета с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции, заключающийся в том, что радиолокационный сигнал, отраженный от самолета с турбореактивным двигателем, подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье и преобразуется в амплитудно-частотный спектр, спектральные составляющие которого обусловлены отражениями сигнала от планера самолета с турбореактивным двигателем и вращающихся лопаток рабочего колеса компрессора низкого давления его силовой установки, путем пороговой обработки амплитудно-частотного спектра сигнала формируют только те отсчеты доплеровских частот  с соответствующими амплитудами спектральных составляющих, которые превысили установленный порог, где
с соответствующими амплитудами спектральных составляющих, которые превысили установленный порог, где  N - общее количество отсчетов доплеровских частот, за время Т каждого обзора пространства измеряются два значения дальности Д1 и Д2 до самолета с турбореактивным двигателем, по измеренным значениям дальности Д1 и Д2 предварительно вычисляют частотную позицию доплеровской частоты
N - общее количество отсчетов доплеровских частот, за время Т каждого обзора пространства измеряются два значения дальности Д1 и Д2 до самолета с турбореактивным двигателем, по измеренным значениям дальности Д1 и Д2 предварительно вычисляют частотную позицию доплеровской частоты  обусловленную скоростью сближения носителя импульсно-доплеровской радиолокационной станции с планером самолета с турбореактивным двигателем, как
обусловленную скоростью сближения носителя импульсно-доплеровской радиолокационной станции с планером самолета с турбореактивным двигателем, как  где λ – рабочая длина волны импульсно-доплеровской радиолокационной станции, в амплитудно-частотном спектре сигнала определяют ближайшее к предварительно вычисленной частотной позиции доплеровской частоты
где λ – рабочая длина волны импульсно-доплеровской радиолокационной станции, в амплитудно-частотном спектре сигнала определяют ближайшее к предварительно вычисленной частотной позиции доплеровской частоты  значение доплеровской частоты
значение доплеровской частоты  с соответствующей амплитудой
с соответствующей амплитудой  спектральной составляющей, превысившей установленный порог, которое окончательно определяет доплеровскую частоту сигнала
спектральной составляющей, превысившей установленный порог, которое окончательно определяет доплеровскую частоту сигнала  в его амплитудно-частотном спектре, обусловленную скоростью сближения носителя импульсно-доплеровской радиолокационной станции с планером самолета с турбореактивным двигателем, определяют в амплитудно-частотном спектре сигнала позицию доплеровской частоты
в его амплитудно-частотном спектре, обусловленную скоростью сближения носителя импульсно-доплеровской радиолокационной станции с планером самолета с турбореактивным двигателем, определяют в амплитудно-частотном спектре сигнала позицию доплеровской частоты  где j = 1, …, (i - 1), (i + 1),…, N, на которой находится спектральная составляющая, превысившая установленный порог и имеющая максимальную амплитуду Aj, j = 1,…, (i - 1), (i + 1),…, N, которая соответствует значению доплеровской частоты FK, обусловленной скоростью сближения носителя импульсно-доплеровской радиолокационной станции с вращающимися лопатками первой ступени компрессора низкого давления силовой установки самолета с турбореактивным двигателем, вычисляют разность доплеровских частот ΔFпк = (Fп - Fк), за время Т каждого обзора пространства измеряют значения бортовых пеленгов ϕг азимута и ϕв угла места, по измеренным значениям бортовых пеленгов ϕг и ϕв и средней дальности Д, определяемой, как Д = (Д1 +Д2) / 2, вычисляют высоту полета самолета с турбореактивным двигателем в соответствии с выражением
где j = 1, …, (i - 1), (i + 1),…, N, на которой находится спектральная составляющая, превысившая установленный порог и имеющая максимальную амплитуду Aj, j = 1,…, (i - 1), (i + 1),…, N, которая соответствует значению доплеровской частоты FK, обусловленной скоростью сближения носителя импульсно-доплеровской радиолокационной станции с вращающимися лопатками первой ступени компрессора низкого давления силовой установки самолета с турбореактивным двигателем, вычисляют разность доплеровских частот ΔFпк = (Fп - Fк), за время Т каждого обзора пространства измеряют значения бортовых пеленгов ϕг азимута и ϕв угла места, по измеренным значениям бортовых пеленгов ϕг и ϕв и средней дальности Д, определяемой, как Д = (Д1 +Д2) / 2, вычисляют высоту полета самолета с турбореактивным двигателем в соответствии с выражением
 ,
,
где  – высота полета самолета-носителя радиолокационной станции;
– высота полета самолета-носителя радиолокационной станции;
 – поправка высоты, учитывающая рефракцию радиоволн;
– поправка высоты, учитывающая рефракцию радиоволн;
 – эквивалентный радиус Земли (при нормальной рефракции радиоволн RЭ = 8500 км);
– эквивалентный радиус Земли (при нормальной рефракции радиоволн RЭ = 8500 км);  – высота полета самолета с турбореактивным двигателем относительно высоты полета самолета-носителя радиолокационной станции, отличающийся тем, что дополнительно вычисляется скорость полета самолета с турбореактивным двигателем в соответствии с выражением
– высота полета самолета с турбореактивным двигателем относительно высоты полета самолета-носителя радиолокационной станции, отличающийся тем, что дополнительно вычисляется скорость полета самолета с турбореактивным двигателем в соответствии с выражением
 ,
,
где α определяется в соответствии с выражением

где Vc – скорость самолета-носителя БРЛС, ϕв = 0,5(ϕв1 + ϕв2);
ϕг=0,5(ϕг1+ϕг2), для каждой высоты Н и скорости V полета самолета с турбореактивным двигателем, где 
 – минимальная и максимальная высоты полета самолета с турбореактивным двигателем,
– минимальная и максимальная высоты полета самолета с турбореактивным двигателем, 
 – минимальная и максимальная скорость полета самолета с турбореактивным двигателем, диапазон разностей
– минимальная и максимальная скорость полета самолета с турбореактивным двигателем, диапазон разностей  априорно разбивают на Q неперекрывающихся поддиапазонов, нижняя
априорно разбивают на Q неперекрывающихся поддиапазонов, нижняя  и верхняя
и верхняя  границы каждого q-го поддиапазона,
границы каждого q-го поддиапазона,  соответствующего q-му типу цели, высоте Н и скорости V полета самолета с турбореактивным двигателем, определяются выражениями
соответствующего q-му типу цели, высоте Н и скорости V полета самолета с турбореактивным двигателем, определяются выражениями


где n1 = n⋅0,98 и n2 = n⋅1,02 – соответственно минимальное и максимальное значение величины относительных оборотов вращения ротора силовой установки, n – значение величины относительных оборотов вращения ротора силовой установки, соответствующее высоте Н и скорости V полета самолета с турбореактивным двигателем, одинаковые для всех их типов, FP – максимальная частота вращения ротора компрессора низкого давления силовой установки q-го типа самолета с турбореактивным двигателем, Z – количество лопаток рабочего колеса первой ступени компрессора низкого давления силовой установки самолета с турбореактивным двигателем q-го типа, при попадании разности доплеровских частот ΔFпк в q-ый поддиапазон принимают решение о q-м типе самолета с турбореактивным двигателем.
| СПОСОБ РАСПОЗНАВАНИЯ ТИПА САМОЛЁТА С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2020 |
|
RU2731878C1 |
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции при воздействии уводящей по скорости помехи | 2019 |
|
RU2732281C1 |
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции | 2019 |
|
RU2705070C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ГРУППОВОЙ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТЫ С ТУРБОРЕАКТИВНЫМИ ДВИГАТЕЛЯМИ" | 2011 |
|
RU2456633C1 |
| AU 2021105650 A4, 14.10.2021 | |||
| EP 0533220 A1, 24.03.1993 | |||
| KR 101594918 B1, 17.02.2016 | |||
| US 2007285303 A1, 13.12.2007. | |||

