Изобретение относится к системам автоматического регулирования, а конкретно к системам стабилизации и наведения в двух плоскостях объектов, расположенных на подвижном основании, например, оружия боевых машин пехоты (БМП) и других подвижных объектов, где требуется обвод опасных зон.
Известны системы стабилизации и наведения БМП-2 (стабилизатор 2Э36), БМП-3 (стабилизатор 2Э52), работающие в условиях наличия опасных зон наведения. Одной из возможных причин появления опасной зоны является подъем воздухозаборной трубы из корпуса БМП вверх при преодолении водных преград на плаву. В этом случае воздухозаборная труба является преградой для наведения оружия при определенном сочетании углов наведения в вертикальной и горизонтальной плоскостях. В стабилизаторе 2Э36 при подходе к опасной зоне приводы отключаются, и, таким образом, режим обвода опасной зоны не реализован. Похожее решение применено в следящей системе, где при заходе выходного вала системы в запретную зону выключается управление двигателем. Для обеспечения более высокой эффективности БМП с стабилизаторе 2Э52 был реализован автоматический обвод опасной зоны.
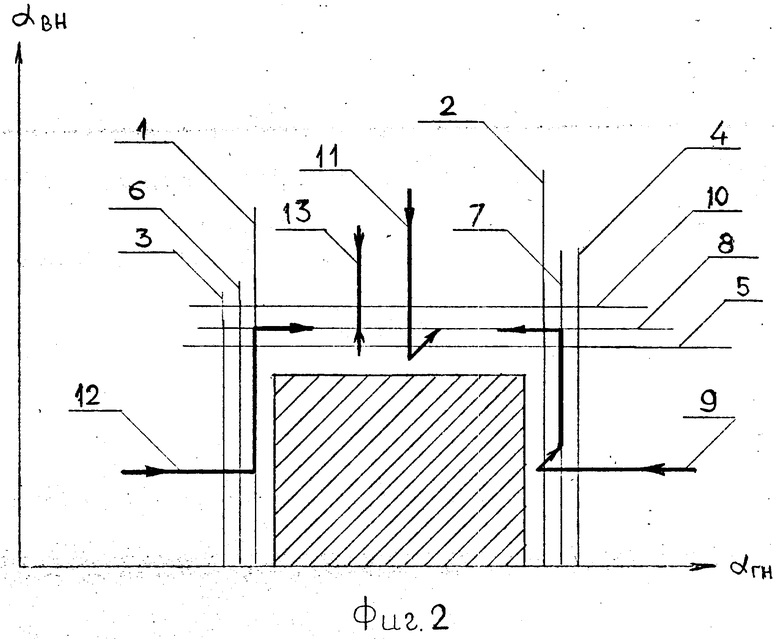
На фиг. 1 представлена упрощенная блочная схема прототипа, стабилизатора 2Э52; на фиг. 2 схема обвода опасной зоны в прототипе и в предлагаемой системе стабилизации; на фиг. 3 блочная схема предлагаемой системы стабилизации; на фиг. 4 использованная в макете схема устройства выборки и хранения, инвертора и сумматора.
Упрощенная блочная схема стабилизатора 2Э52, представленная на фиг. 1, состоит из привода вертикального наведения (ВН) 1, привода горизонтального наведения (ГН) 2 и формирователя 3, обеспечивающего выдачу команды опасной зоны. Привод ВН 1 состоит из последовательно соединенных усилителя 4, исполнительного привода 5 и механически связанных с его выходным валом датчика абсолютного положения 6 и датчика относительного положения 7. Датчик абсолютного положения 6 соединен через ключ 8 с первым входом усилителя 4. Второй вход усилителя 4 подключен к выходу датчика относительного положения 7 через последовательно соединенные сумматор 9 и ключ 10, причем второй вход сумматора 9 соединен с выходом блока эталонного напряжения 11. Первый выход формирователя 3 соединен с управляющим входом ключа 8 и через инвертор 12 с управляющим входом ключа 10.
В свою очередь привод ГН 2 состоит из последовательно соединенных усилителя 13, исполнительного привода 14 и механически связанных с его выходным валом датчика абсолютного положения 15 и датчика относительного положения 16. Датчик абсолютного положения 15 соединен через ключ 17 с первым входом усилителя 13. Второй вход усилителя 13 подключен к выходу датчика относительного положения 16 через последовательно соединенные сумматор 18 и ключ 19, причем второй вход сумматора 18 соединен с выходом блока эталонного напряжения 20. Второй выход формирователя 3 соединен с управляющим входом ключа 17 и через инвертор 21 с управляющим входом ключа 19. Первый, второй и третий входы формирователя 3 соединены соответственно с выходами датчиков относительного положения 7 и 16 и выходом датчика абсолютного положения 6.
Стабилизатор 2Э52 в режиме стабилизации работает по сигналам датчиков абсолютного положения 6 и 15, при этом ключи 8 и 17 открыты, а ключи 10 и 19 закрыты. Формирователь 3 по сигналам датчиков относительного положения 7 и 16 формирует команды переключения, позволяющее исключить вход объекта стабилизации в опасную зону и обеспечить ее обвод.
Работа стабилизатора при обводе опасной зоны иллюстрируется фиг. 2 в системе координат, где:
αгн угол поворота ГН,
αвн угол поворота ВН,
заштрихованная область соответствует опасной зоне.
Линии 1 и 2 соответствуют углам формирования сигналов переключения при подходе к опасной зоне, соответственно, слева и справа. Для уменьшения вероятности появления автоколебаний на краю опасной зоны устройство формирования сигнала опасной зоны имеет гистерезис (например, компаратор с положительной обратной связью), и поэтому линии 3 и 4 соответствуют углам отключения сигнала опасной зоны при выходе из опасной зоны. Линия 5 соответствует углу формирования сигнала переключения при наведении стабилизатора сверху в сторону опасной зоны. Сигнал переключения формируется при нахождении объекта стабилизации в зоне, ограниченной линиями 1, 2, 5, и при этом закрываются ключи 8 и 17 (фиг. 1), а открываются ключи 10 и 19, и приводы переключаются на управление от датчиков относительного положения 7 и 16 со смещениями, заданными блоками эталонного напряжения 11 и 20, позволяющими перевести привод ГН на углы, соответствующие линиям 6 или 7 (фиг. 2), в зависимости от того, с какой стороны к опасной зоне подходит привод ГН, а привод ВН переводится на линию 8. Схема на фиг. 1 для упрощения содержит цепи формирования сигнала смещения только с одной стороны опасной зоны. При движении влево по траектории 9 (фиг. 2) после входа в зону, ограниченную линиями 2 и 5, и переключения приводов на управление от датчиков относительного положения направление движения меняется, и начинается движение вверх и вправо до согласования привода ГН с углом, соответствующим линии 7, и затем движение вверх до согласования привода ВН с углом, соответствующим линии 8. После выхода из зоны, ограниченной линиями 1, 2 и 5, команда на втором выходе формирователя 3 (фиг. 1) выключается, привод ГН 2 переключается на датчик абсолютного положения 15 и продолжается движение влево.
С целью исключения при этом автоколебаний на верхней границе опасной зоны формирователь 3 при выходе из опасной зоны обеспечивает переключение команды на своем первом выходе только тогда, когда выходной сигнал датчика абсолютного положения 6 будет соответствовать угловому положению выше линии 10 (фиг. 2).
При движении сверху к опасной зоне по траектории 11 после входа опасную зону, ограниченную линиями 1, 2 и 5, и переключения приводов ВН 1 и ГН 2 (фиг. 1) на управление от датчиков относительного положения начинается движение вверх и влево (или вправо) до линии 8. При достижении линии 8 команда на втором выходе формирователя 3 переключается и движение прекращается, но возможно наведение влево или вправо. После достижения выходным сигналом датчика 6 величины, соответствующей линии 10, происходит переключение команды на первом выходе формирователя 3 и разрешается наведение вверх.
Недостаток описанной системы стабилизации заключается в том, что при выходе из опасной зоны привод ГН совершает резкие скачки при переключении на датчики относительного положения. Эти скачки отрицательно влияют на условия работы оператора, сиденье которого находится на конструкции, жестко связанной с выходным валом привода ГН. Неприятные ощущения при скачках привода ГН затрудняют работу оператора по управлению системой стабилизации и другими системами, имеющимися в подвижном объекте. Неизбежные скачки привода ВН не оказывают существенного влияния на условия работы оператора т.к. выходной вал привода ВН не связан механически с конструкциями, на которых находится кресло оператора.
Снижение неприятных ощущений при скачках привода ГН возможно за счет демпфирования переходных процессов с помощью включения в структуру привода ГН обратных связей по скорости относительных перемещений, но эти возможности ограничены, т.к. скачки все равно остаются.
Исключение скачков привода ГН при обводе опасной зоны в существующей схеме стабилизатора 2Э52 невозможно потому, что при вхождении в опасную зону привод ГН переключается на работу от датчиков относительного положения с заранее установленным смещением, соответствующим линиям 6 или 7 на фиг. 2. Причем при подходе к опасной зоне сбоку по траектории 9 теоретически возможно совмещение линий 2 и 7, что способствовало бы исключению скачка привода ГН, но практически всегда имеется между двумя линиями какая-то разница, обусловленная неидальностью элементов стабилизатора. При подходе к опасной зоне сверху по траектории 11 скачок привода ГН тем более неизбежен.
Предлагаемое изобретение направлено на повышение точности обвода опасной зоны и повышение комфортности работы оператора при обводе за счет исключения скачков привода ГН.
Исключение скачков привода ГН при обводе опасной зоны достигается за счет изменения структуры системы стабилизации, позволяющей ГН при входе в опасную зону с тем значением угла, при котором собственно происходит вход в опасную зону.
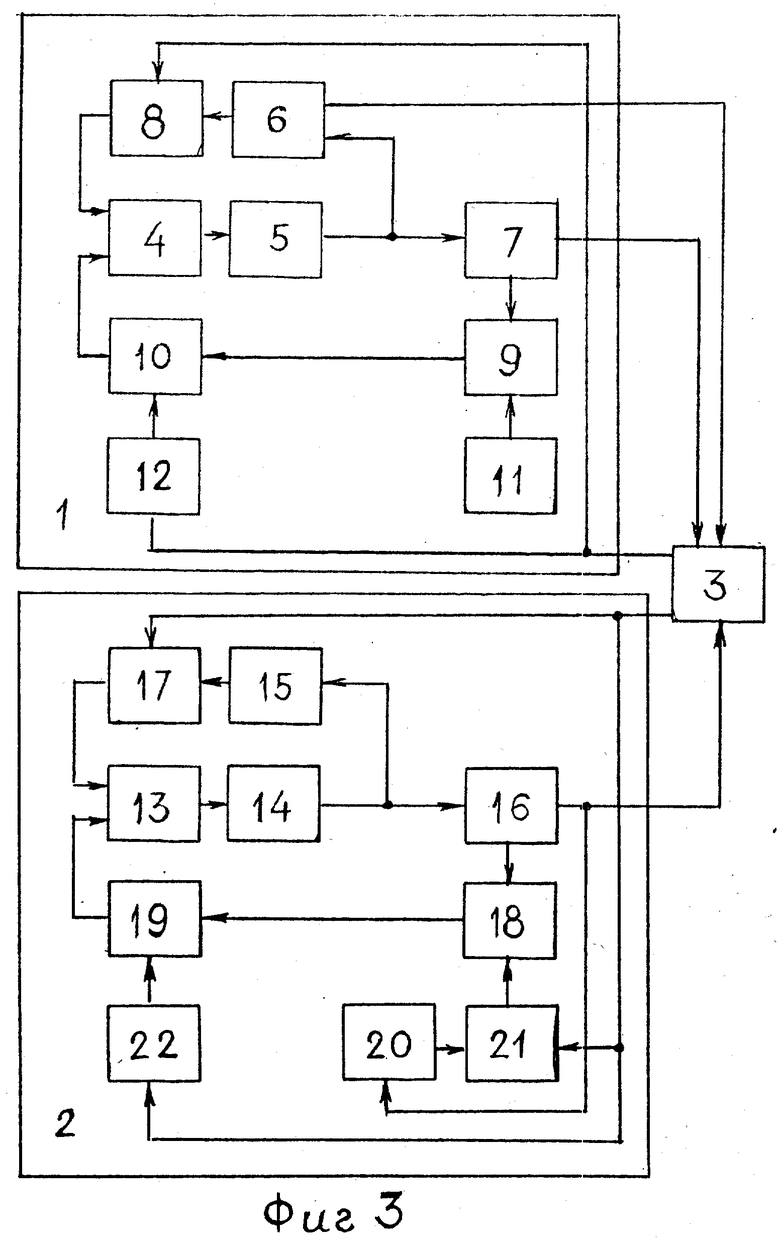
Сущность предлагаемого решения поясняется фиг. 3.
Аналогично прототипу предлагаемая система стабилизации, представленная на фиг. 3, состоит из привода ВН1, привода ГН2 и формирователя 3. Также привод ВН1 состоит из последовательно соединенных усилителя 4, исполнительного привода 5 и механически связанных с его выходным валом датчика абсолютного положения 6 и датчика относительного положения 7. Датчик абсолютного положения 6 соединен с первым входом усилителя 4 через ключ 8, управляющий вход которого, являющийся первым входом привода ВН1, соединен с первым выходом формирователя 3.
Второй вход усилителя 4 подключен к выходу датчика относительного положения 7 через последовательно соединенные сумматор 9 и ключ 10, причем второй вход сумматора 9 соединен с выходом блока эталонного напряжения 11, а управляющий вход ключа 10 соединен с первым выходом формирователя 3 через инвертор 12. Первый вход формирователя 3 соединен с выходом датчика относительного положения 7, являющегося первым выходом привода ВН1, а второй вход формирователя 3 соединен с выходом датчика абсолютного положения 6, являющегося вторым выходом привода ВН1.
В свою очередь привод ГН2 состоит из последовательно соединенных усилителя 13, исполнительного привода 14 и механически связанных с его выходным валом датчика абсолютного положения 15 и датчика относительного положения 16. Выход датчика абсолютного положения 15 соединен через первый ключ 17 с первый входом усилителя 13. Выход датчика относительного положения 16 соединен со вторым входом усилителя 13 через последовательно соединенные сумматор 18 и второй ключ 19. Второй вход сумматора 18 соединен с выходом датчика относительного положения 16 через последовательно соединенные инвертор 20 и устройство выборки и хранения 21, второй вход которого соединен с выходом формирователя 3. Второй выход формирователя 3 соединен с управляющим входом ключа 17 и через инвертор 22- с управляющим входом ключа 19, третий вход формирователя 3 соединен с выходом датчика относительного положения 16.
Предлагаемое изобретение, представленное на фиг. 3, отличается от прототипа тем, что вместо второго блока эталонного напряжения в систему стабилизации включено устройство выборки и хранения 21, информационный вход которого соединен через инвертор 20 с выходом датчика относительного положения 16, а управляющий вход устройства выборки и хранения 21 соединен с выходом формирователя 3.
Принцип действия устройства выборки и хранения (УВХ) заключается в том, что его выходной сигнал в режиме выборки быстро достигает значения входного сигнала и затем отслеживает его до тех пор, пока не поступит команда на хранение. При поступлении команды на хранение УВХ будет хранить значение выходного сигнала, которое было в момент поступления команды на хранение.
В предлагаемой системе стабилизации УВХ 21 в основном режиме работает в режиме выборки. При этом на его выходе повторяется инвертированный сигнал датчика относительного положения 16. В результате на выходе сумматора 18 направление постоянно равно нулю, поскольку на два входа сумматора 18 поступает неинвертированный и инвертированный сигналы датчика относительного положения 16. Сложение двух противоположных пор знаку и одинаковых по амплитуде сигналов дает на выходе сумматора напряжение, равное нулю. Переключение УВХ 21 в режим хранения происходит по команде формирователя 3 при выходе системы стабилизации в опасную зону. При этом УВХ 21 запоминает значение сигнала датчика относительного положения 16, соответствующее моменту поступления команды на переключение от формирователя 3, и с выхода УВХ 21 поступает на вход сумматора 18 постоянный сигнал. Благодаря сложению текущего значения сигнал датчика относительного положения 16 и инвертированного сигнала датчика относительного положения 16, соответствующего моменту входа привода ГН2 в опасную зону, на выходе сумматора формируется сигнал, пропорциональный отклонению привода ГН2 от угла подхода ГН2 к опасной зоне.
Одновременно с этими действиями выключение ключа 17 и включение ключа 19 по команде формирователя 3 обеспечивает остановку привода ГН2 на границе опасной зоны без скачка. При этом привод ВН1 выводится из опасной зоны так же, как это было в прототипе.
На фиг. 2 линиями 12 и 13 показаны траектории обвода опасной зоны предлагаемой системой стабилизации при подходе к опасной зоне соответственно слева и сверху. При подходе слева привод ГН 2 останавливается на линии 1 (при подходе справа на линии 2), а привод ВН поднимается на угол, соответствующий линии 8, после чего продолжается наведение привода ГН2 по траектории 12. При подходе к опасной зоне сверху по траектории 13 привод ГН 2 останавливается без скачки при достижении приводом ВН1 угла, соответствующего линии 5. При этом привод ВН1 переключается на управление от датчика относительного положения 7 и поднимается на фиксированный угол, соответствующий линии 8. Оба привода останавливаются до поступления одной из команд: наведение влево или право.
После этого привод ГН по команде со второго выхода формирователя 3 переключается на управление от датчика абсолютного положения (ключ 17 отрывается, а ключ 19 закрывается), и разрешается наведение влево или вправо. Переключение команды на первом выходе формирователя 3 происходит, когда сигнал на выходе датчика абсолютного положения 6 будет соответствовать угловому положению выше уровня линии 10 (фиг. 2). При этом привод ВН1 переключается на управление от датчика абсолютного положения, и разрешается наведение вверх.
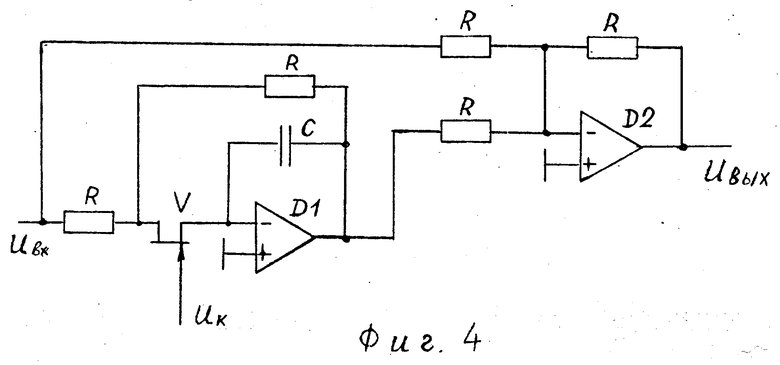
Простейшая возможная схема, выполняющая роль устройства выборки и хранения, инвертора и сумматора, представлена на фиг. 4. Операционный усилитель Д2 выполняет роль сумматора, на инвертирующий вход которого поступает входной сигнал как непосредственно, так и через устройство выборки и хранения, собранное на операционном усилителе Д1 и выполняющее одновременно роль инвертора. При наличии на затворе полевого транзистора V открывающего напряжения Uк устройство выборки и хранения работает в режиме выборки. При равенстве всех резисторов, показанных на схеме, коэффициент передачи схемы равен нулю. Конденсатор C и номинал R резистора выбираются небольшими, чтобы постоянная апериодического звена, определяемая их величиной, практически не влияла на динамические характеристики силы.
При поступлении на затвор транзистора V закрывающего напряжения Uк устройство выборки и хранения переводится в режим запоминания (Д1 в режиме интегратора). При этом на выходе операционного усилителя Д1 хранится значение Uвх, соответствующее моменту поступления команды на закрытие полевого транзистора V. С целью исключения недопустимого дрейфа выходного напряжения устройства выборки и хранения ее схема была собрана на операционных усилителях типа 544УД2, в которых для повышения их стабильности применены схемы на полевых транзисторах.
Предлагаемое техническое решение проверено в составе опытного образца стабилизатора 2Э52-1. Стендовые испытания и испытания в составе объекта 501 показали, что при его внедрении обеспечивается повышение комфортности условий работы оператора при обводе опасной зоны за счет исключения скачков привода ГН, которые до внедрения предложенного устройства достигали 3o и существенно снижали работоспособность оператора.
По результатам экспериментальных исследований предлагаемое техническое решение внедрено в документацию изделия 2Э52-1.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2018 |
|
RU2789421C1 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2018 |
|
RU2682086C1 |
| ДВУХПЛОСКОСТНАЯ СИСТЕМА СТАБИЛИЗАЦИИ И НАВЕДЕНИЯ | 1999 |
|
RU2150072C1 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2014 |
|
RU2553712C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2016 |
|
RU2628038C2 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2014 |
|
RU2550407C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ПАКЕТА НАПРАВЛЯЮЩИХ БОЕВОЙ МАШИНЫ РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ | 2009 |
|
RU2387943C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2013 |
|
RU2525148C1 |
| СЛЕДЯЩАЯ СИСТЕМА | 2000 |
|
RU2190180C2 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2010 |
|
RU2430326C1 |
Использование: военная техника, в частности, системы стабилизации и наведения в двух плоскостях объектов, расположенных на подвижном основании, например, оружия боевых машин пехоты (БМП) и других подвижных объектов, где требуется обвод опасных зон. Сущность изобретения, позволяющего существенно повысить точность обвода опасной зоны и комфортность работы оператора, заключается в том, что в систему стабилизации, содержащую привод вертикального наведения (ВН), привод горизонтального наведения (ГН) и формирователь команды переключения, работающую в режиме стабилизации по сигналам датчиков абсолютного положения, а в режиме обвода опасной зоны - по сигналам датчиков относительного положения, вместо блока эталонного напряжения, определяющего положение, на которое переключается привод ГН при подходе к опасной зоне, в привод ГН введено устройство выборки и хранения, вход которого соединен с выходом датчика относительного положения через инвертор. Переключение устройства выборки и хранения в режим запоминания (хранения) по команде формирователя команды переключения позволяет получить на его выходе напряжение, точно соответствующее углу входа привода ГН в опасную зону, и исключить при этом скачки привода ГН. 4 ил.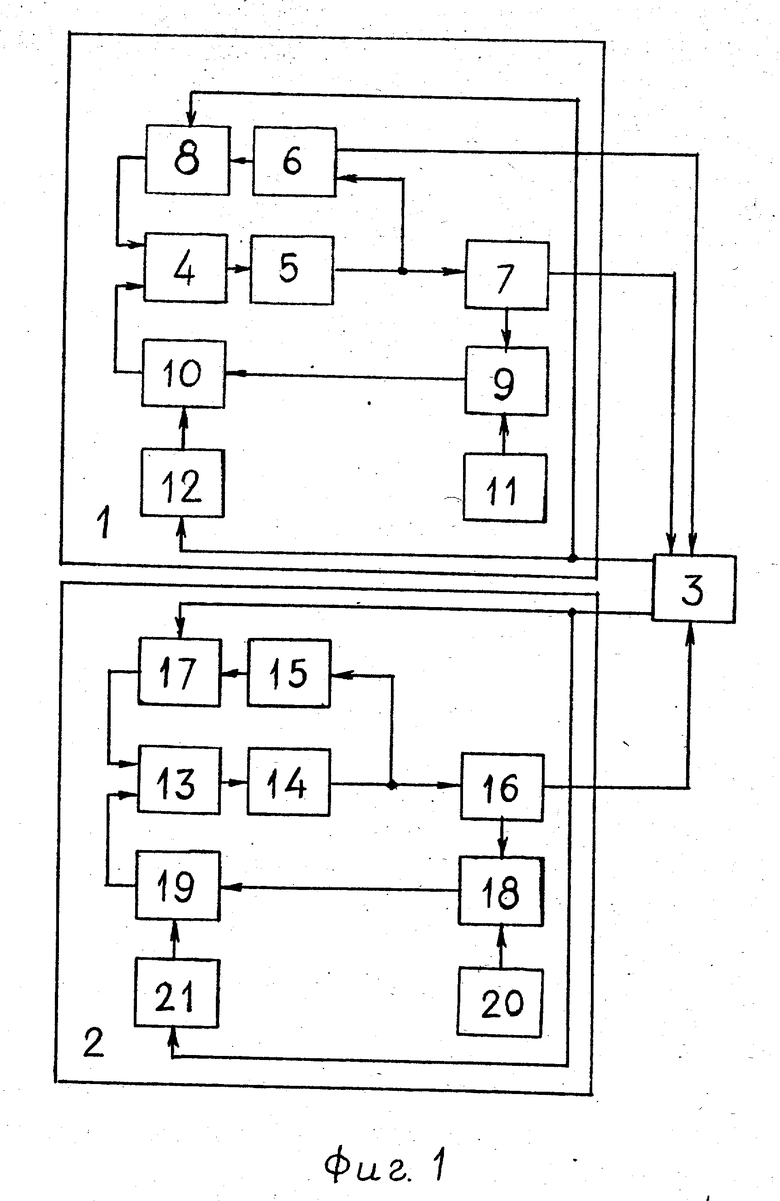
Система стабилизации и наведения объекта, расположенного на подвижном основании, например, оружия боевой машины пехоты, содержащая приводы вертикального и горизонтального наведения и формирователь, причем привод горизонтального наведения состоит из последовательно соединенных усилителя и исполнительного привода и механически связанных с его выходным валом датчика абсолютного положения, выход которого через первый ключ соединен с первым входом усилителя, и датчика относительного положения, выход которого через последовательно соединенные сумматор и второй ключ соединен с вторым входом усилителя, а входы формирователя соединены с первым и вторым выходами привода вертикального наведения и выходом датчика относительного положения привода горизонтального наведения, первый и второй выходы формирователя соединены соответственно с входом привода вертикального наведения и с управляющим входом первого ключа и через инвертор с управляющим входом второго ключа привода горизонтального наведения, отличающаяся тем, что в привод горизонтального наведения введены инвертор и устройство выборки и хранения, вход которого соединен с выходом датчика относительного положения через инвертор, а выход
с вторым входом сумматора, причем управляющий вход устройства выборки и хранения соединен с вторым выходом формирователя.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
