Изобретение относится к области систем автоматического регулирования объектов, расположенных на подвижном основании, а конкретно к системам стабилизации и наведения в двух плоскостях артиллерийского вооружения, например блока оружия боевой машины пехоты (БМП).
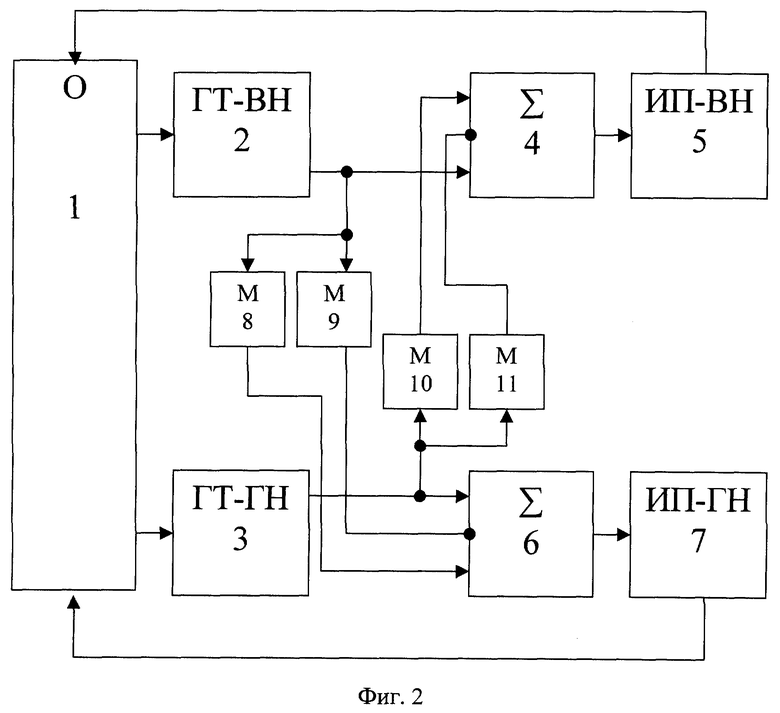
Известна система стабилизации и наведения блока оружия БМП-3 (изделие 2Э52) [1], блочная схема которой представлена на фиг. 1. Система состоит из установленных на объекте управления 1 (блоке оружия) в двух взаимоперпендикулярных плоскостях датчиков абсолютной угловой скорости 2 и 3. Датчик 2 измеряет абсолютную скорость объекта 1 в вертикальной плоскости, а датчик 3 - в горизонтальной. Выходы датчиков 2 и 3 соединены соответственно с входами исполнительных приводов 4 и 5, которые связаны с объектом 1 и осуществляют его стабилизацию в двух плоскостях.
К недостаткам описанной системы относится появление взаимовлияния приводов вследствие наличия погрешности в механической установке перпендикулярности измерительных плоскостей датчиков скорости. Из-за этого при движении объекта управления 1, например, в вертикальной плоскости появляется некоторый сигнал на выходе датчика скорости, установленного в горизонтальной плоскости. Этот сигнал вызывает несанкционированное перемещение объекта управления 1 в горизонтальной плоскости. Выставка (юстировка) перпендикулярности измерительных плоскостей датчиков скорости для устранения этого дефекта осуществляется механическим способом, путем подбора прокладок под места крепления датчиков скорости. Эта операция является трудоемкой и занимает значительное машинное время.
Предлагаемое изобретение направлено на упрощение операции юстировки перпендикулярности измерительных плоскостей датчиков скорости.
Сущность предлагаемого технического решения заключается в том, что в двухплоскостную систему стабилизации и наведения, содержащую установленные на объекте управления во взаимоперпендикулярных плоскостях первый и второй одноплоскостные датчики угловой скорости, а также первый и второй исполнительные приводы, связанные с объектом управления, введены первый и второй сумматоры, установленные между соответствующими датчиками угловой скорости и исполнительными приводами, а также четыре масштабных делителя, причем инвертирующий и неинвертирующий входы первого сумматора соединены через первый и второй масштабные делители с выходом второго одноплоскостного датчика угловой скорости, а аналогичные входы второго сумматора соединены через третий и четвертый масштабные делители с выходом первого одноплоскостного датчика угловой скорости.
На фиг. 1 представлена блочная схема системы стабилизации и наведения изделия 2Э52, принятой за прототип;
на фиг. 2 - блочная схема предлагаемой системы стабилизации и наведения.
Сведения, подтверждающие возможность осуществления предлагаемого технического решения с получением вышеуказанного технического результата, заключается в следующем.
Предлагаемая система стабилизации и наведения (фиг. 2) состоит из установленных на объекте управления 1 в двух взаимоперпендикулярных плоскостях датчиков абсолютной угловой скорости 2 и 3. Выход датчика 2 через последовательно соединенные сумматор 4 и исполнительный привод 5 связан с объектом управления 1. Аналогично выход датчика 3 через сумматор 6 и исполнительный привод 7 связан с объектом управления 1. Одновременно выход датчика 2 соединен через первый масштабный делитель 8 с неинвертирующим, а через второй масштабный делитель 9 - с инвертирующим входами сумматора 6.
Аналогично выход датчика 3 соединен через третий масштабный делитель 10 с неинвертирующим входом, а через четвертый масштабный делитель 11 - с инвертирующим входами сумматора 4.
Предлагаемая система работает следующим образом.
Управление объектом 1 осуществляется в двух взаимоперпендикулярных плоскостях по сигналам одноплоскостных датчиков абсолютной скорости 2 и 3, измерительные плоскости которых совпадают с этими плоскостями. Например, датчик 2 установлен в вертикальной плоскости, а датчик 3 - в горизонтальной. При движении объекта 1, например, в вертикальной плоскости вследствие того, что имеется погрешность в механической установке (неперпендикулярность) измерительных плоскостей датчиков 2 и 3, появляется несанкционированный сигнал в датчике 3, установленном в горизонтальной плоскости. Этот сигнал вызывает несанкционированное перемещение объекта 1 в горизонтальной плоскости, причем направление перемещения зависит от направления отклонения измерительной плоскости датчика 3 от нормали к вертикальной плоскости. Исключение этого несанкционированного перемещения осуществляется путем подачи компенсирующего сигнала с выхода датчика 2 через масштабные делители 8 и 9 на сумматор 6. Масштабные делители 8 и 9 настраиваются таким образом, чтобы на выходе сумматора 6 несанкционированный сигнал датчика 3 полностью компенсировался масштабированным сигналом датчика 2.
Аналогичным образом с помощью масштабных делителей 10 и 11 компенсируется влияние горизонтального канала управления на вертикальный канал.
Таким образом, осуществляется электрическая юстировка каналов управления. При этом отпадает необходимость в механической установке измерительных плоскостей одноплоскостных датчиков абсолютной скорости, что значительно упрощает и сокращает настроечные работы при отработке систем стабилизации и наведения объектов.
Предлагаемое техническое решение проверено электронным моделированием, а также экспериментальной проверкой макета системы стабилизации блока оружия БМП. Результаты проверок показали возможность полной компенсации взаимовлияния каналов управления, а также подтвердили удобство и оперативность проведения электрической юстировки данных каналов.
По результатам экспериментальной проверки предлагаемое техническое решение использовано в документации модернизированного стабилизатора блока оружия перспективной БМП.
Литература
1. Стабилизатор 2Э52. Техническое описание ПБ1 331 092ТО. Архив ВНИИ "Сигнал".
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СТАБИЛИЗАЦИИ И НАВЕДЕНИЯ | 1996 |
|
RU2095728C1 |
| СЛЕДЯЩАЯ СИСТЕМА | 2000 |
|
RU2190180C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ И НАВЕДЕНИЯ | 2002 |
|
RU2230279C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ И НАВЕДЕНИЯ | 2001 |
|
RU2207487C1 |
| БОЕВОЙ МОДУЛЬ СО СТАБИЛИЗАЦИЕЙ ЛИНИИ ПРИЦЕЛИВАНИЯ ВООРУЖЕНИЯ | 2023 |
|
RU2816100C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ И НАВЕДЕНИЯ | 2000 |
|
RU2204784C2 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| Система наведения и стабилизации | 2020 |
|
RU2735789C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2015 |
|
RU2593931C1 |
Изобретение относится к системам автоматического регулирования объектов, расположенных на подвижном основании, а конкретно к системам стабилизации и наведения в двух плоскостях артиллерийского вооружения, например блока оружия боевой машины пехоты (БМП). Технический результат - упрощение юстировки перпендикулярности измерительных плоскостей датчиков скорости. Сущность технического решения заключается в том, что в двухплоскостную систему стабилизации и наведения, содержащую установленные на объекте управления во взаимоперпендикулярных плоскостях первый и второй одноплоскостные датчики угловой скорости, а также первый и второй исполнительные приводы, связанные с объектом управления, введены первый и второй сумматоры. Сумматоры установлены между соответствующими датчиками угловой скорости и исполнительными приводами. Также введены четыре масштабных делителя, причем инвертирующий и неинвертирующий входы первого сумматора соединены через первый и второй масштабные делители с выходом второго одноплоскостного датчика угловой скорости, а аналогичные входы второго сумматора соединены через третий и четвертый масштабные делители с выходом первого одноплоскостного датчика угловой скорости. 2 ил.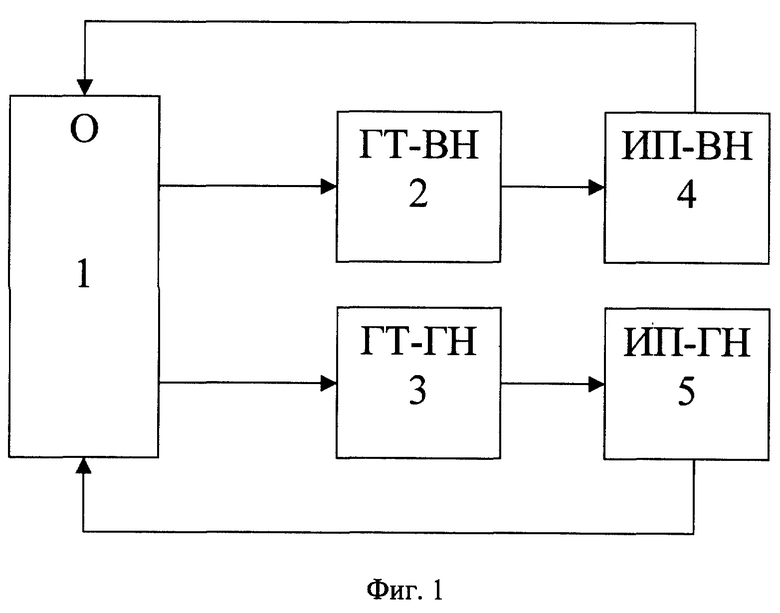
Двухплоскостная система стабилизации и наведения, содержащая установленные на объекте управления во взаимоперпендикулярных плоскостях первой и второй одноплоскостные датчики угловой скорости, а также первый и второй исполнительные приводы, связанные с объектом управления, отличающаяся тем, что в систему введены первый и второй сумматоры, установленные между соответствующими датчиками угловой скорости и исполнительными приводами, а также четыре масштабных делителя, причем инвертирующий и неинвертирующий входы первого сумматора соединены через первый и второй масштабные делители с выходом второго датчика угловой скорости, а аналогичные входы второго сумматора соединены через третий и четвертый масштабные делители с выходом первого датчика угловой скорости.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ И НАВЕДЕНИЯ | 1996 |
|
RU2095728C1 |
| УСТРОЙСТВО ДЛЯ БЛОКИРОВКИ КОКСОВЫХ МАШИН | 1992 |
|
RU2016043C1 |
| Сверло для трепанации костей черепа | 1957 |
|
SU111192A1 |
| СПОСОБ ПОЛУЧЕНИЯ АСБЕСТО-БИТУМНОЙ ЭМУЛЬСИИ | 2000 |
|
RU2158244C1 |

