Изобретение относится к области систем автоматического регулирования, а именно к системам стабилизации пакета направляющих с реактивными снарядами (PC), размещенного на боевой машине реактивной системы залпового огня (БМ РСЗО).
Известна система наведения пакета направляющих 9 В621 ПБ 1.331.017 ТО БМ РСЗО "Ураган". Наведение пакета направляющих с PC в заданное направление стрельбы осуществляется с пульта наведения: в вертикальной плоскости - приводом вертикального наведения (ВН), а в горизонтальной - приводом горизонтального наведения (ГН). Каждый из приводов ВН и ГН в вышеуказанной БМ РСЗО представляет собой последовательно соединенные между собой пульт наведения (задающее устройство), суммирующий усилитель, электромашинный усилитель, исполнительный электродвигатель.
Пуск PC из пакета направляющих в данных БМ РСЗО осуществляется только после стопорения приводов ВН и ГН, при этом колебания корпуса машины определяют рассеивание PC.
Известна также система наведения пакета направляющих 6П616 ПБ1.342.053 ТО БМ РСЗО "Смерч", которая по сравнению с БМ РСЗО "Ураган" обеспечивает повышенную дальность стрельбы за счет применения PC большего калибра. Система наведения пакета направляющих состоит из двух приводов. ВН и, ГН, при этом перемещение пакета направляющих в горизонтальной плоскости осуществляется посредством электропривода, а в вертикальной плоскости с помощью гидропривода. Данная система является наиболее близкой к заявленному изобретению по совокупности признаков и принята за прототип.
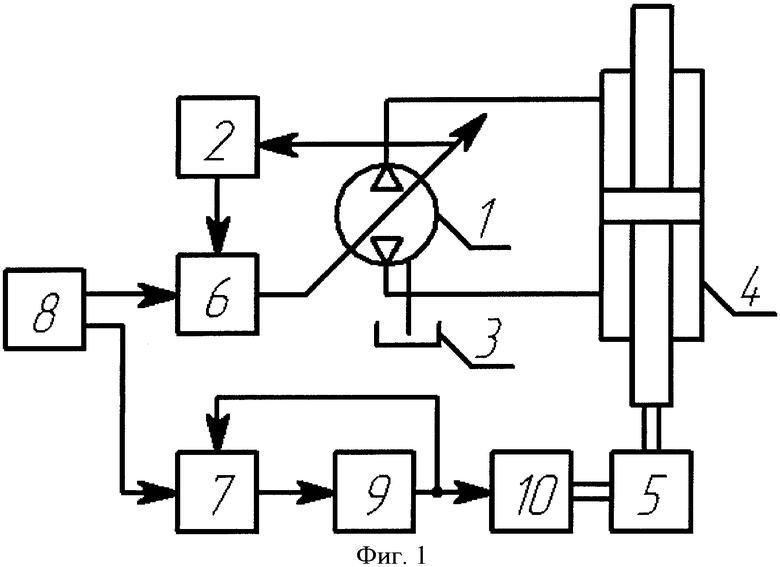
Прототип содержит (Фиг.1) соединенные между собой регулируемый насос 1 с датчиком положения 2 его люльки, гидробак 3, гидродвигатель 4, кинематически связанный с пакетом направляющих 5, первый 6 и второй 7 суммирующие усилители, пульт наведения 8, электромашинный усилитель 9, исполнительный электродвигатель 10.
Основной режим работы системы обеспечивает перемещение пакета направляющих 5 на заданные углы наведения с помощью приводов ВН и ГН по сигналу управления, сформированному в пульте наведения 8. Наведение пакета направляющих 5 в вертикальной плоскости осуществляется гидроприводом ВН, посредством отклонения рукоятки пульта наведения 8 в вертикальной плоскости. Выходной сигнал с пульта наведения 8 через первый суммирующий усилитель 6 поступает на управляющий вход регулируемого насоса 1, изменяя его производительность пропорционально углу отклонения рукоятки пульта наведения 8. Напорные магистрали регулируемого насоса 1 гидролинией соединены с гидродвигателем 4, который и обеспечивает перемещение пакета направляющих 5 в вертикальной плоскости. Необходимый диапазон регулирования скоростей наведения пакета направляющих 5 обеспечивается позиционированием углов отклонения люльки регулируемого насоса 1, для чего в структуре регулируемого насоса 1 реализована обратная связь по положению люльки.
Перемещение пакета направляющих 5 в горизонтальной плоскости осуществляется электроприводом ГН, также от пульта наведения 8, но отклонением рукоятки в горизонтальной плоскости. Выходной сигнал с пульта наведения 8 через второй суммирующий усилитель 7 поступает на обмотки управления электромашинного усилителя 9. Выходной сигнал с электромашинного усилителя 9 подается на исполнительный электродвигатель 10, который обеспечивает перемещение пакета направляющий 5 в горизонтальной плоскости. Для обеспечения необходимого диапазона регулирования скоростей перемещения пакета направляющих 5, в структуре электропривода реализована отрицательная обратная связь по выходному напряжению электромашинного усилителя 9.
Пуск PC из пакета направляющих в данной БМ РСЗО осуществляется также только после стопорения приводов ВН и ГН.
Общими недостатками рассмотренных систем наведения пакета направляющих БМ РСЗО является значительное рассеивание PC, вследствие возникающих колебаний корпуса машины, вызванных появлением возмущающих моментов во время пуска PC, действующих на пакет направляющих и БМ РСЗО в целом. Кроме того, происходит сбивка наведения пакета направляющих БМ на заданные координаты цели вследствие невозвратных деформаций грунта под опорами БМ, а также за счет люфто-гистерезистных явлений в гидравлических и механических передачах.
Для устранения влияния данных явлений расчет БМ РСЗО должен производить корректировку наводки пакета направляющих на заданные координаты цели, что снижает скорострельность стрельбы (увеличивается время между пусками PC), либо, в случае проведения залпа без дополнительной корректировки наведения в заданное направление, ухудшаются результаты поражения целей из-за значительного рассеивания PC.
В прототипе эти недостатки выражены более ярко, поскольку возмущающие моменты, возникающие при пусках PC на БМ РСЗО "Смерч" имеют большее значение, чем в аналогах, вследствие большего калибра PC.
Целью заявленного технического решения является сокращение времени полного залпа PC с БМ РСЗО за счет введения режима стабилизации пакета направляющих с PC и, как следствие, отработка приводами отклонений пакета направляющих, возникающих при пуске PC от заданного направления стрельбы.
Указанная цель достигается тем, что в систему стабилизации пакета направляющих, содержащую регулируемый насос с датчиком положения его люльки, гидробак, гидродвигатель, кинематически связанный с пакетом направляющих, первый и второй суммирующие усилители, введены формирователь ошибки, задающее устройство, третий суммирующий усилитель, датчик давления, установленный в напорной гидролинии регулируемого насоса, первый и второй дросселирующие гидрораспределители с электромагнитным управлением, первый и второй гидроцилиндры, кинематически связанные с пакетом направляющих, датчики абсолютного положения и абсолютной скорости, установленные на пакете направляющих, при этом выход задающего устройства соединен с первым входом третьего суммирующего усилителя, второй инвертирующий вход третьего суммирующего усилителя соединен с выходом датчика положения люльки регулируемого насоса, третий инвертирующий вход третьего суммирующего усилителя соединен с выходом датчика давления, выход третьего суммирующего усилителя соединен с управляющим входом регулируемого насоса, вход регулируемого насоса соединен с гидробаком, первый инвертирующий вход формирователя ошибки соединен с первым выходом датчика абсолютного положения (канал вертикальной стабилизации - ВС), второй инвертирующий вход формирователя ошибки соединен со вторьм выходом датчика абсолютного положения (канал горизонтальной стабилизации-ГС), первый инвертирующий вход первого суммирующего усилителя соединен с первым выходом датчика абсолютной скорости (канал ВС), первый инвертирующий вход второго суммирующего усилителя соединен со вторым выходом датчика абсолютной скорости (канал ГС), первый выход формирователя ошибки соединен со вторым входом первого суммирующего усилителя, второй выход формирователя ошибки соединен со вторым входом второго суммирующего усилителя, первый и второй выходы первого суммирующего усилителя соединены с первым и вторым управляющими входами первого дросселирующего гидрораспределителя с электромагнитным управлением, первый и второй выходы второго суммирующего усилителя соединены с первым и вторым управляющими входами второго дросселирующего гидрораспределителя с электромагнитным управлением, входы первого и второго дросселирующих гидрораспределителей с электромагнитным управлением гидролиниями соединены с выходом регулируемого насоса, а их сливные гидролинии соединены с гидробаком, выходы первого дросселирующего гидрораспределителя с электромагнитным управлением соединены с входами гидродвигателя, первый выход второго дросселирующего гидрораспределителя с электромагнитным управлением соединен с штоковой полостью первого гидроцилиндра и с поршневой полостью второго гидроцилиндра, второй выход второго дросселирующего гидрораспределителя с электромагнитным управлением соединен с поршневой полостью первого гидроцилиндра и с штоковой полостью второго гидроцилиндра.
В соответствии с возможным вариантом практической реализации заявляемого технического решения вышеупомянутый формирователь ошибки содержит первый и второй сумматоры, при этом их инвертирующие входы являются соответственно первым и вторым входами формирователя ошибки, а выходы каждого из сумматоров являются соответственно первым и вторым выходами формирователя ошибки.
Материалы заявки поясняются графическими материалами, где:
- на Фиг.1 представлена структурная схема прототипа;
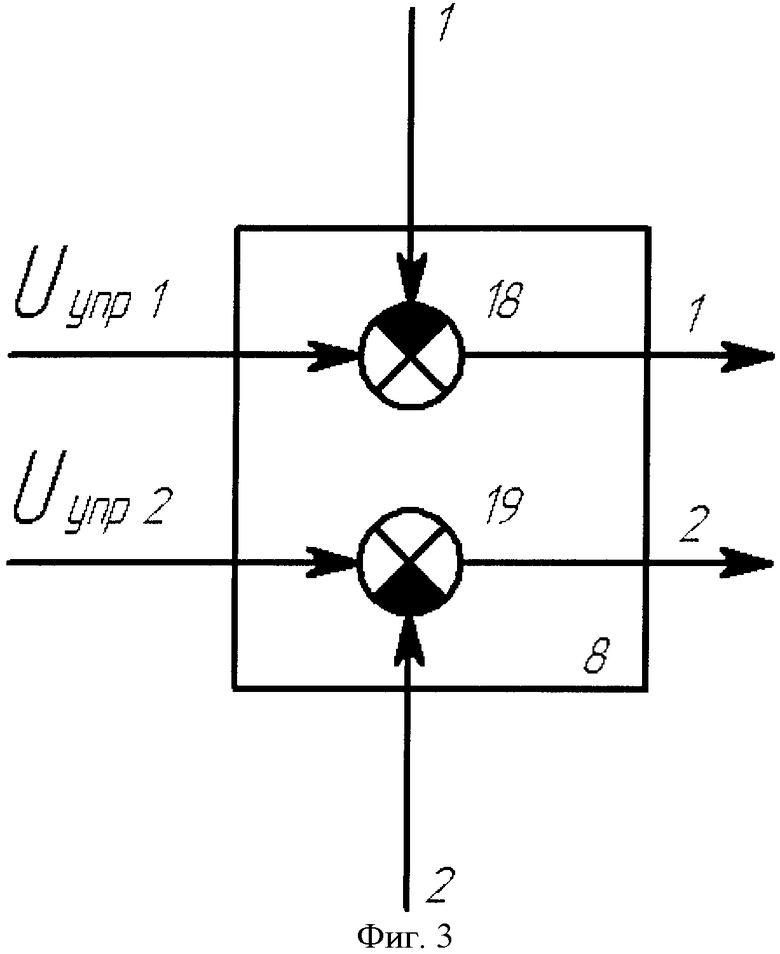
- на Фиг.2 представлена структурная схема заявляемого устройства;
- на Фиг.3 представлен вариант исполнения формирователя ошибки.
Система стабилизации пакета направляющих боевой машины реактивной системы залпового огня (Фиг.2) содержит регулируемый насос 1 с датчиком положения 2 его люльки, гидробак 3, гидродвигатель 4, кинематически связанный с пакетом направляющих 5, первый 6 и второй 7 суммирующие усилители, формирователь ошибки 8, задающее устройство 9, третий суммирующий усилитель 10, датчик давления 11. установленный в напорной гидролинии регулируемого насоса 1, первый 12 и второй 13 дросселирующие гидрораспределители с электромагнитным управлением, первый 14 и второй 15 гидроцилиндры, кинематически связанные с пакетом направляющих 5, датчики абсолютного положения 16 и абсолютной скорости 17, установленные на пакете направляющих 5, при этом выход задающего устройства 9 соединен с первым неинвертирующим входом третьего суммирующего усилителя 10, второй инвертирующий вход третьего суммирующего усилителя 10 соединен с выходом датчика положения 2 люльки регулируемого насоса 1, третий инвертирующий вход третьего суммирующего усилителя 10 соединен с выходом датчика давления 11, выход третьего суммирующего усилителя 10 соединен с управляющим входом регулируемого насоса 1, вход регулируемого насоса 1 соединен с гидробаком 3, первый инвертирующий вход формирователя ошибки 8 соединен с первым выходом датчика абсолютного положения 16 (канал ВС), второй инвертирующий вход формирователя ошибки 8 соединен со вторьм выходом датчика абсолютного положения 16 (канал ГС), первый инвертирующий вход первого суммирующего усилителя 6 соединен с первым выходом датчика абсолютной скорости 17 (канал ВС), первый инвертирующий вход второго суммирующего усилителя 7 соединен со вторьм выходом датчика абсолютной скорости 17 (канал ГС), первый выход формирователя ошибки 8 соединен со вторым неинвертирующим входом первого суммирующего усилителя 6, второй выход формирователя ошибки 8 соединен со вторым неинвертирующим входом второго суммирующего усилителя 7, первый и второй выходы первого суммирующего усилителя 6 соединены с первым и вторым управляющими входами первого дросселирующего гидрораспределителя 12 с электромагнитным управлением, первый и второй выходы второго суммирующего усилителя 7 соединены с первым и вторым управляющими входами второго дросселирующего гидрораспределителя 13 с электромагнитным управлением, входы первого 12 и второго 13 дросселирующих гидрораспределителей с электромагнитным управлением гидролиниями соединены с выходом регулируемого насоса 1, а их сливные гидролинии соединены с гидробаком 3, выходы первого дросселирующего гидрораспределителя 12 с электромагнитным управлением соединены с входами гидродвигателя 4, первый выход второго дросселирующего гидрораспределителя 13 с электромагнитным управлением соединен с штоковой полостью первого гидроцилиндра 14 и с поршневой полостью второго гидроцилиндра 15, второй выход второго дросселирующего гидрораспределителя 13 с электромагнитным управлением соединен с поршневой полостью первого гидроцилиндра 14 и с штоковой полостью второго гидроцилиндра 15.
Система стабилизации пакета направляющих БМ РСЗО работает следующим образом.
При сходе PC из пакета направляющих 5 возникают моментные возмущения, приводящие к изменению положения пакета направляющих 5 в абсолютных координатах, вследствие нежесткости конструкции и деформаций грунта под опорами БМ РСЗО. Датчик абсолютного положения 16, установленный на пакете направляющих 5, формирует корректирующие сигналы, пропорциональные изменению положения пакета направляющих 5, а датчик абсолютной скорости 17, установленный также на пакете направляющих 5, формирует корректирующие сигналы, пропорциональные изменению скорости положения пакета направляющих 5. Сигналы с первого и второго выходов датчика абсолютного положения 16 поступают на соответствующие первый и второй инвертирующие входы формирователя ошибки 8. Пакет направляющих 5 с PC перемещается в заданное направление стрельбы, относительно которого в дальнейшем будет осуществляться его стабилизация, посредством подачи управляющих сигналов Uупр1 и Uупр2 на неинвертирующие входы первого 18 и второго 19 сумматоров из состава формирователя ошибки 8, выходы которых являются выходами формирователя ошибки 8. В формирователе ошибки 8 сигналы обратных связей по абсолютным координатам суммируются с управляющими сигналами Uупр1 и Uупр2, задающими направление пакета направляющих 5 на цель. Сигналы с первого и второго выходов формирователя ошибки 8 поступают на вторые неинвертирующие входы первого 6 и второго 7 суммирующих усилителей (каналы ВС и ГС), а сигналы с первого и второго выходов датчика абсолютной скорости 17 поступают на первые инвертирующие входы первого 6 и второго 7 суммирующих усилителей (каналы ВС и ГС), выходные сигналы с первого и второго выходов первого 6 и второго 7 суммирующих усилителей поступают на первые и вторые управляющие входы первого 12 и второго 13 дросселирующих гидрораспределителей с электромагнитным управлением соответственно, вызывая изменение положения их золотников. В соответствии с положением золотников первого 12 и второго 13 дросселирующих гидрораспределителей изменяется расход рабочей жидкости, поступающей в гидродвигатель 4 (канал ВС) и первый 14 и второй 15 гидроцилиндры (канал ГС), в результате чего пакет направляющих 5 перемещается в направлении уменьшения ошибки первоначально заданного положения, до тех пор, пока на первом и втором выходах формирователя ошибки 8 не сформируются сигналы уровней логического "нуля".
Для поддержания постоянного давления в гидросистеме задающее устройство 9, выполненное, например, в виде делителя напряжения, формирует на своем выходе постоянный сигнал, который поступает на первый неинвертирующий вход третьего суммирующего усилителя 10, на второй и третий инвертирующие входы которого подаются сигналы с выходов датчиков положения 2 и давления 11 соответственно. Сформированный и усиленный таким образом выходной сигнал с выхода третьего суммирующего усилителя 10 поступает на управляющий вход регулируемого насоса 1, что позволяет управлять его производительностью. Таким образом, в заявляемой системе формируется отрицательная связь по давлению, которая позволяет стабилизировать давление в системе при изменении расхода рабочей жидкости, проходящей через первый 12 и второй 13 дросселирующие гидрораспределители с электромагнитным управлением.
На Фиг.3 представлен вариант исполнения формирователя ошибки 8.
Формирователь ошибки 8 содержит первый 18 и второй 19 сумматоры (фиг.3). Сигнал с первого выхода датчика абсолютного положения 16 (фиг.2) поступает на первый вход формирователя ошибки 8 - инвертирующий вход первого 18 сумматора, где сравнивается с текущим значением Uупр1. При появлении на выходе первого сумматора 18 (фиг.3) корректирующего сигнала, поступающего на второй неинвертирующий вход первого суммирующего усилителя 6 (фиг.2) из состава канала горизонтальной стабилизации пакета направляющих 5, происходит перемещение пакета направляющих 5 в сторону уменьшения ошибки его положения, посредством изменения расхода рабочей жидкости, подводимой через первый дросселирующий гидрораспределитель 12 на гидродвигатель 4. Аналогичным образом работает и второй 19 сумматор, входящий в состав формирователя ошибки 8.
Сигналы с первого и второго выходов формирователя ошибки 8, подаваемые на первые неинвертирующие входы первого 6 и второго 7 суммирующих усилителей, являются сигналами главных обратных связей в системе стабилизации по положению пакета направляющих 5 с PC.
В качестве датчика абсолютного положения и датчика абсолютной скорости в данной системе использована система самоориентирующаяся гироскопическая курсокреноуказания ССГККУ АЮИЖ.462515.017-01.
Внедрение системы стабилизации пакета направляющих БМ РСЗО позволило повысить точность поражения заданных целей и сократить время залпа за счет исключения необходимости корректировки наведения пакета направляющих с PC боевым расчетом БМ РСЗО.
Математическое моделирование структуры системы стабилизации, а также пуски PC с опытного образца БМ РСЗО с использованием режима стабилизации пакета направляющих показали уменьшение углов колебаний пакета направляющих с PC по сравнению с вариантом пусков PC с застопоренных приводов ВН и ГН.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СТАБИЛИЗАЦИИ ПАКЕТА НАПРАВЛЯЮЩИХ БОЕВОЙ МАШИНЫ РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ | 2011 |
|
RU2503908C2 |
| Система наведения и стабилизации пакета направляющих боевой машины реактивной системы залпового огня | 2017 |
|
RU2681913C1 |
| Система наведения и стабилизации пакета направляющих боевой машины реактивной системы залпового огня | 2017 |
|
RU2669903C1 |
| Электрогидравлическая система | 2021 |
|
RU2797330C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ РАМЫ ТЕХНОЛОГИЧЕСКОГО АГРЕГАТА | 2011 |
|
RU2499928C2 |
| Электрогидравлическая система управления | 2016 |
|
RU2641192C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2004 |
|
RU2272181C1 |
| Электрогидравлическая система управления | 2018 |
|
RU2708004C1 |
| Электрогидравлическая система управления | 2018 |
|
RU2708477C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТНЫМ КОЛЬЦОМ СТАРТОВОГО РАКЕТНОГО КОМПЛЕКСА | 2017 |
|
RU2748156C1 |
Изобретение относится к области систем автоматического регулирования, а именно к системам автоматического наведения и стабилизации пакета направляющих с реактивными снарядами (PC), размещенного на боевой машине реактивной системы залпового огня (БМ РСЗО), Технический результат - повышение точности наведения пакета направляющих с PC на заданные координаты и скорострельности вооружения БМ РСЗО за счет введения режима стабилизации пакета направляющих с PC и, как следствие, отработкой приводами наведения отклонений пакета направляющих, возникающих при пуске PC. Система содержит регулируемый насос с датчиком положения его люльки, гидробак, гидродвигатель, кинематически связанный с пакетом направляющих, первый и второй суммирующие усилители. Система снабжена формирователем ошибки, задающим устройством, третьим суммирующим усилителем, датчиком давления, установленным в напорной гидролинии регулируемого насоса, первым и вторым дросселирующими гидрораспределителями с электромагнитным управлением. Система также содержит первый и второй гидроцилиндры, кинематически связанные с пакетом направляющих, датчики абсолютного положения и абсолютной скорости, установленные на пакете направляющих. 1 з.п. ф-лы, 3 ил.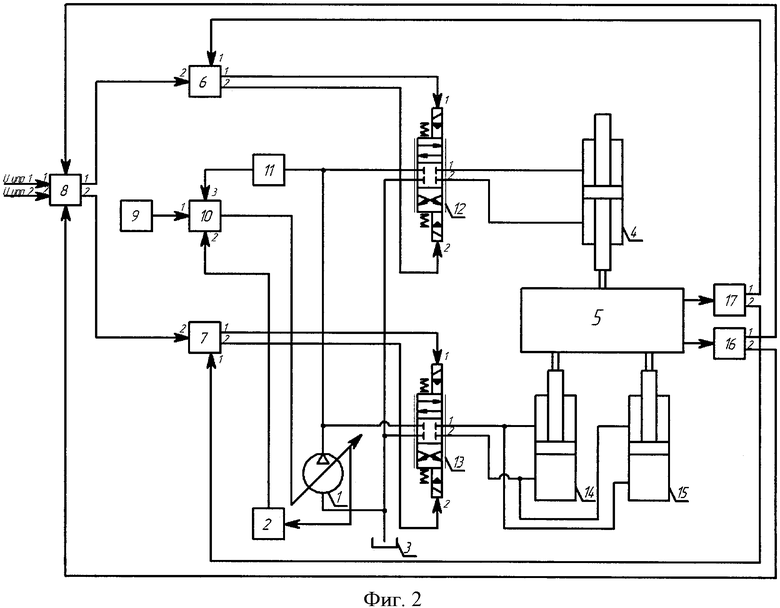
1. Система стабилизации пакета направляющих боевой машины реактивной системы залпового огня, содержащая регулируемый насос с датчиком положения его люльки, гидробак, гидродвигатель, кинематически связанный с пакетом направляющих с реактивными снарядами, первый и второй суммирующие усилители, отличающаяся тем, что она снабжена формирователем ошибки, задающим устройством, третьим суммирующим усилителем, датчиком давления, установленным в напорной гидролинии регулируемого насоса, первым и вторым дросселирующими гидрораспределителями с электромагнитным управлением, первым и вторым гидроцилиндрами, кинематически связанными с пакетом направляющих, датчиками абсолютного положения и абсолютной скорости, установленными на пакете направляющих, при этом выход задающего устройства соединен с первым неинвертирующим входом третьего суммирующего усилителя, второй инвертирующий вход которого соединен с выходом датчика положения люльки регулируемого насоса, третий инвертирующий вход третьего суммирующего усилителя соединен с выходом датчика давления, а выход третьего суммирующего усилителя соединен с управляющим входом регулируемого насоса, вход регулируемого насоса соединен с гидробаком, первый инвертирующий вход формирователя ошибки соединен с первым выходом датчика абсолютного положения, второй инвертирующий вход формирователя ошибки соединен со вторым выходом датчика абсолютного положения, первый инвертирующий вход первого суммирующего усилителя соединен с первым выходом датчика абсолютной скорости, первый инвертирующий вход второго суммирующего усилителя соединен со вторым выходом датчика абсолютной скорости, первый выход формирователя ошибки соединен со вторым неинвертирующим входом первого суммирующего усилителя, второй выход формирователя ошибки соединен со вторым неинвертирующим входом второго суммирующего усилителя, первый и второй выходы первого суммирующего усилителя соединены с первым и вторым управляющими входами первого дросселирующего гидрораспределителя с электромагнитным управлением, первый и второй выходы второго суммирующего усилителя соединены с первым и вторым управляющими входами второго дросселирующего гидрораспределителя с электромагнитным управлением, входы первого и второго дросселирующих гидрораспределителей с электромагнитным управлением гидролиниями соединены с выходом регулируемого насоса, а их сливные гидролинии соединены с гидробаком, выходы первого дросселирующего гидрораспределителя с электромагнитным управлением соединены с входами гидродвигателя, первый выход второго дросселирующего гидрораспределителя с электромагнитным управлением соединен с штоковой полостью первого гидроцилиндра и с поршневой полостью второго гидроцилиндра, второй выход второго дросселирующего гидрораспределителя с электромагнитным управлением соединен с поршневой полостью первого гидроцилиндра и с штоковой полостью второго гидроцилиндра.
2. Система по п.1, отличающаяся тем, что формирователь ошибки содержит два сумматора, инвертирующие входы которых являются соответственно первым и вторым входами формирователя ошибки, а выходы каждого из сумматоров являются соответственно первым и вторым выходами формирователя ошибки.
| УСТРОЙСТВО ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ПАКЕТА НАПРАВЛЯЮЩИХ РСЗО ОТ ЗАДАННОГО ПОЛОЖЕНИЯ | 2005 |
|
RU2296936C2 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ИЗМЕРЕНИЯ КОЛЕБАНИЙ ПАКЕТА НАПРАВЛЯЮЩИХ И УПРАВЛЕНИЯ ОГНЕМ РСЗО | 2005 |
|
RU2291370C1 |
| Установка для отверждения изделий из полимерных материалов | 1987 |
|
SU1578021A1 |
| US 3748954 A, 31.07.1973. | |||

