Изобретение относится к военной технике, а именно к системам автоматического управления и регулирования, в частности к системе дистанционного управления вооружением (далее по тексту - СДУВ), тип (или типы) устанавливаемого вооружения на которую, определяются требованием заказчика.
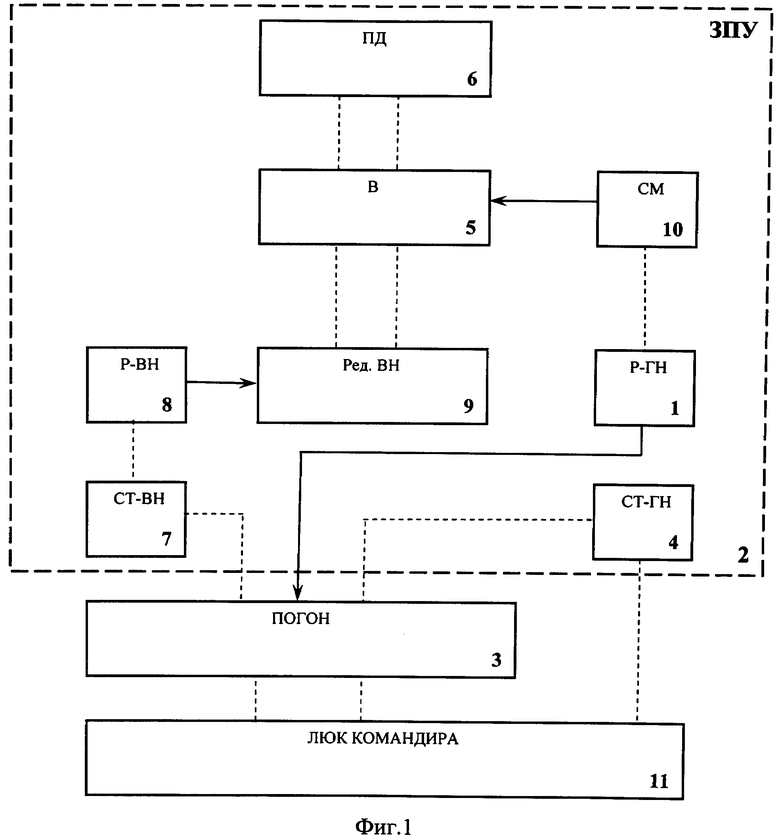
Известна зенитно-пулеметная установка (ЗПУ) танка Т-72, объект 184, приводы горизонтального (далее по тексту - ГН) и вертикального (далее по тексту - ВН) наведения которой, выполнены по структурной схеме, изображенной на Фиг.1. Данная система наведения принята за прототип.
(См.) 1) С. Устьянцев Д. Колмаков «Боевые машины «Уралвагонзавода». Танк Т-72» Нижний Тагил, 2004 г.; С.70.
2) Суворов С.В. Танк Т-72. Вчера, сегодня, завтра // Танкомастер. Специальный выпуск. М., 2001. СП; Он же. Т-64. Первенец танков второго поколения // Танкомастер. Специальный выпуск. М., 2001. С.21.
3) Тевет Ш. Танки Таммуза // Арабо-израильские войны, 1956; 1967. М., 2003.
4) Карцев Л.Н. Моя судьба - Нижний Тагил. М., 1991. С137.
5) Колмаков Д.Г. Время, люди, танки. Нижний Тагил, 2001; С.45.
Приводы ГН и ВН системы, принятой за прототип, представляют собой автономные механические приводы, обеспечивающие режим ручного (нестабилизированного) наведения пулемета (вооружения) на цель посредством рукоятки управления по ГН (Р-ГН) 1 и рукоятки маховика (Р-ВН) 8 редуктора по ВН (Ред.ВН) 9.
Согласно схеме, при отклонении рукоятки по ГН (Р-ГН) 1 механическое управляющее воздействие передается на (ЗПУ) 2, установленную на среднем погоне (ПОГОН) 3 люка командира 11 при ручном переведении механического стопора по ГН (СТ-ГН) 4 в положение «расстопорено», при этом возможно ручное наведение пулемета (вооружения) (В) 5, установленного в люльке и механически связанного с ним прицела диоптрического (ПД) 6, на выбранную цель в плоскости ГН.
Привод ВН работает следующим образом. При нажатии клавиши механического тормоза (стопора) (СТ-ВН) 7, расположенного на рукоятке маховика (Р-ВН) 8, оператор поворачивает рукоятку маховика редуктора (Ред.ВН) 9 и тем самым обеспечивает ручное наведение пулемета (вооружения) (В) 5, установленного в люльке, и механически связанного с ним прицела диоптрического (ПД) 6, на выбранную цель в плоскости ВН.
Для производства выстрела из пулемета (вооружения) (В) 5 необходимо нажать на спусковой механизм (СМ) 10, расположенный на рукоятке (Р-ГН) 1, который связан механически с пулеметом (вооружением) (В) 5 через гибкий трос. Взвод пулемета (вооружения) (В) 5 производится вручную рукояткой взвода.
Недостатками вышеуказанной системы-прототипа являются:
- малая эффективность ведения прицельного огня из пулемета при движении танка, (командиру танка требуется открывать люк и по пояс вылезать из танка и крутить ЗПУ, весом более 300 кг, за счет своей физической силы, что возможно только при отсутствии внешнего огневого воздействия на стреляющего);
- отсутствие функции зоны разрешения выстрела, позволяющей значительно сократить количество выпущенных боеприпасов, летящих мимо цели;
- отсутствие функции баллистического вычислителя, позволяющего вести стрельбу из пулемета с учетом факторов (балпоправок), влияющих на точность попадания в цель с первого выстрела;
- отсутствие функции блокировок по цепям стрельбы пулемета, необходимых для обеспечения безопасности от поражения собственным вооружением других членов экипажа и элементов конструкции танка, в том числе и его основного вооружения;
- неудобство в управлении ручными приводами ЗПУ командиром при движении танка (вес ЗПУ превышает 300 кг, что совместно с моментом трения в среднем погоне вращающейся башенки командира приводит к возникновению значительных моментов на рукоятках управления, которые должны компенсироваться за счет физической силы командира, что не всегда возможно в боевых условиях);
- неудобство в управлении ручными приводами ЗПУ командиром, вызванное их разнесенным расположением друг от друга, что не позволяет в полной мере осуществлять одновременное наведение на цель установленного пулемета в плоскости ВН и ГН, усложняя тем самым, возможность сопровождения цели с последующим ее поражением;
- зависимость наведения ЗПУ по ГН на выбранную цель от режимов работы наводчика танка, обеспечивающего наведение (башни) основного вооружения танка в плоскости ГН на цель, отличную от цели, выбранной командиром танка;
- отсутствие возможности дистанционного наведения пулемета;
- отсутствие возможности дистанционного перезаряжания пулемета командиром танка без выхода из люка, что повышает вероятность его поражения в боевой обстановке;
- отсутствие автоматического приведения вооружения и его стопорения на углах, определяемых удобством расположения пулемета при его загрузке новым боекомплектом или установкой его в походное положение при выключении ЗПУ;
- отсутствие информационных каналов обмена с другими устройствами, что не позволяет значительно повысить эксплуатационные характеристики ЗПУ, в том числе возможности ее диагностики.
Техническими задачами заявляемого изобретения являются:
- повышение эффективности ведения прицельного огня из установленного на СДУВ вооружения, особенно при движении объекта военного назначения (ОВН);
- повышение эффективности использования боеприпасов;
- уменьшение времени подготовки первого выстрела и повышение вероятности попадания его в цель;
- повышение безопасности экипажа и элементов конструкции ОВН от поражения собственным вооружением;
- повышение удобства управления установленным вооружением;
- обеспечение возможности дистанционного перезаряжания (взвода) оператором установленного вооружения;
- повышение эффективности одновременного наведения по ГН и ВН установленного вооружения на цель;
- обеспечение автоматического приведения и стопорения установленного вооружения на заданных конструкцией ОВН углах при его загрузке новым боекомплектом или установки в походное положение (при выключении СДУВ);
- исключение механической связи вращающейся платформы и люльки с установленным вооружением с датчиками положения стабилизированного инерциального объекта по ГН и ВН задающего устройства стабилизации, что дает возможность размещать вооружение на расстоянии от задающего устройства стабилизации и, как следствие, и оператора управляющего им;
- обеспечение независимой (автономной) стабилизации (функционирования) СДУВ от основного вооружения ОВН;
- обеспечение режима автономной стабилизации по собственным датчикам СДУВ в случае перехода в данный режим при выходе из строя используемого внешнего задающего устройства стабилизации;
- повышение эксплуатационных характеристик СДУВ и возможности ее диагностики.
Для достижения обеспечиваемого изобретением технического результата в систему дистанционного управления вооружением, содержащую вращающуюся платформу с механическим погоном, редуктор ВН, установленное вооружение (пулемет), механически соединенное с вращающейся платформой, редуктором ВН и прицелом диоптрическим, согласно изобретению дополнительно введены:
- пульт управления оператора (ПУО), включающий:
- датчик положения рукоятки по ГН (ДПР-ГН);
- датчик положения рукоятки по ВН (ДПР-ВН);
- задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГНиВН (ЗУС);
- устройство отображения видеоинформации (УОВ);
- информационно-управляющая система вооружения (ИУСВ);
- блок управления (БУ), включающий:
- первый формирователь сигналов последовательной шины (ФСПШ 1);
- второй формирователь сигналов последовательной шины (ФСПШ 2);
- третий формирователь сигналов последовательной шины (ФСПШ 3);
- контроллер вычисления сигналов управления (КВСУ);
- блок силовых ключей (БСК);
- усилитель мощности ГН (УМГН), включающий:
- формирователь сигналов последовательной шины усилителя ГН (ФСПШ УГН);
- контроллер широтно-импульсного модулятора усилителя ГН (КШИМ УГН);
- широтно-импульсный модулятор ГН (ШИМ ГН);
- усилитель ГН (У-ГН);
- датчик тока усилителя ГН (ДТ ГН);
- датчик скорости вала электродвигателя ГН (СК ГН);
- усилитель мощности ВН (УМВН), включающий:
- формирователь сигналов последовательной шины усилителя ВН (ФСПШ УВН);
- контроллер широтно-импульсного модулятора усилителя ВН (КШИМ УВН);
- широтно-импульсный модулятор ВН (ШИМ ВН);
- усилитель ВН (У-ВН);
- датчик тока усилителя ВН;
- датчик скорости вала электродвигателя ВН;
- электродвигатель ГН (ЭД-ГН);
- электродвигатель ВН (ЭД-ВН);
- редуктор ГН (Ред. ГН);
- датчик положения вращающейся платформы (ДПВП), включающий:
- датчик положения (ДП);
- формирователь сигналов последовательной шины (ФСПШ ДП);
- датчик положения вооружения (ДПВ), включающий:
- датчик положения (ДП);
- формирователь сигналов последовательной шины (ФСПШ ДП);
- датчик абсолютной угловой скорости по ГН (ДУС-ГН),
включающий:
- датчик абсолютной угловой скорости (ДУС);
- формирователь сигналов последовательной шины (ФСПШ ДУС);
-датчик абсолютной угловой скорости по ВН (ДУС-ВН),
включающий:
- датчик абсолютной угловой скорости (ДУС);
- формирователь сигналов последовательной шины (ФСПШ ДУС);
- электромеханический стопор ГН (СТ ГН);
- электромеханический стопор ВН (СТ ВН);
- блок пиропатронный (БП);
- электроспуск установленного вооружения (ЭСВ);
- первая последовательная шина (ПШ1);
- вторая последовательная шина (ПШ2);
- третья последовательная шина (ПШ3);
причем задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН (ЗУС) электрически связано с устройством отображения видеоинформации (УОВ),
а пульт управления оператора (ПУО), содержащий датчики положения рукояток по ГН и ВН, задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН (ЗУС), устройство отображения видеоинформации (УОВ) и информационно-управляющая система вооружения (ИУСВ) электрически связаны с первой последовательной шиной (ПШ1), которая в свою очередь электрически связана с первым формирователем сигналов последовательной шины (ФСПШ 1) блока управления (БУ),
при этом первый формирователь сигналов последовательной шины (ФСПШ 1) электрически связан с контроллером вычисления сигналов управления (КВСУ) блока управления (БУ), который в свою очередь связан со вторым и третьим формирователями сигналов последовательной шины блока управления (БУ) и блоком силовых ключей (БСК) блока управления (БУ)
причем, второй формирователь сигналов последовательной шины (ФСПШ 2) блока управления (БУ) через вторую последовательную шину (ПШ2) электрически связан с формирователями сигналов последовательной шины усилителя ГН и усилителя ВН, соответственно усилителя мощности ГН (УМГН) и усилителя мощности ВН (УМВН),
а третий формирователь сигналов последовательной шины (ФСПШ 3) блока управления (БУ) через третью последовательную шину (ПТТТ 3) электрически связан с формирователями сигналов последовательной шины датчиков положения (ФСПШ ДП) датчика положения вращающейся платформы (ДГТВП) и датчика положения вооружения (ДПВ), а также с формирователями сигналов последовательной шины датчиков абсолютной угловой скорости (ФСПШ ДУС) датчиков абсолютной угловой скорости ГН (ДУС-ГН) и ВН (ДУС-ВН),
при этом датчик положения вращающейся платформы (ДГТВП) кинематически связан с погоном вращающейся платформы (П), датчик положения установленного вооружения (ДПВ) кинематически связан с осью вращения установленного вооружения (В),
а датчики абсолютной угловой скорости ГН (ДУС-ГН) и ВН (ДУС-ВН) механически связаны с установленным вооружением (В),
при этом формирователи сигналов последовательной шины датчиков положения (ФСПШ ДП) датчика положения вращающейся платформы (ДГТВП) и датчика положения вооружения (ДПВ) электрически связаны с датчиками положения (ДП) соответственно датчика положения вращающейся платформы (ДГТВП) и датчика положения вооружения (ДПВ),
а формирователи сигналов последовательной шины датчиков абсолютной угловой скорости (ФСПШ ДУС) датчиков абсолютной угловой скорости ГН (ДУС-ГН) и ВН (ДУС-ВН) электрически связаны с датчиками абсолютной угловой скорости (ДУС) соответственно датчиков абсолютной угловой скорости ГН (ДУС-ГН) и ВН (ДУС-ВН),
при этом с одной стороны формирователь сигналов последовательной шины усилителя ГН (ФСПШ УГН) усилителя мощности ГН (УМГН) электрически связан с контроллером широтно-импульсного модулятора усилителя ГН (КШИМ УГН), связанного с широтно-импульсным модулятором ГН (ШИМ ГН), который в свою очередь связан с входом усилителя ГН (У-ГН) усилителя мощности ГН (УМГН), первый выход которого электрически связан с электродвигателем ГН (ЭД-ГН), а второй и третий выходы соответственно электрически связаны с датчиком тока усилителя ГН (ДТ ГН) и датчиком скорости вала электродвигателя ГН (СК ГН), выходы которых соответственно электрически соединены со входами контроллера широтно-импульсного модулятора усилителя ГН (КШИМ УГН), причем усилитель ГН (У-ГН) усилителя мощности ГН (УМГН) электрически соединен с бортовой сетью ОВН и вращает вал электродвигателя ГН (ЭД-ГН), который через редуктор ГН (Ред.ГН), механически связанный с погоном вращающейся платформы (П), поворачивает вращающуюся платформу (П), а с ней и установленное вооружение (В) в заданном направлении при наличии разрешающего сигнала от блока силовых ключей (БСК), первый выход которого электрически связан с электромеханическим стопором ГН (СТ ГН), обеспечивающим через собственную кинематическую связь с вращающейся платформой (П) ее дистанционное механическое расстопоривание,
с другой стороны формирователь сигналов последовательной шины усилителя ВН (ФСПШ УВН) усилителя мощности ВН (УМВН) электрически связан с контроллером широтно-импульсного модулятора усилителя ВН (КШИМ УВН), связанного с широтно-импульсным модулятором ВН (ШИМ ВН), который в свою очередь связан с входом усилителя ВН (У-ВН) усилителя мощности ВН (УМВН), первый выход которого электрически связан с электродвигателем ВН (ЭД-ВН), а второй и третий выходы соответственно электрически связаны с датчиком тока усилителя ВН (ДТ ВН) и датчиком скорости вала электродвигателя ВН (СК ВН), выходы которых соответственно электрически соединены со входами контроллера широтно-импульсного модулятора усилителя ВН (КШИМ УВН), причем усилитель ВН (У-ВН) усилителя мощности ВН (УМВН) электрически соединен с бортовой сетью ОВН и вращает вал электродвигателя ВН (ЭД-ВН), который через редуктор ВН (Ред.ВН), механически связанный с установленным вооружением (В) и вращающейся платформой (П), поворачивает установленное вооружение (В) в заданном направлении при наличии разрешающего сигнала от блока силовых ключей (БСК), второй выход которого электрически связан с электромеханическим стопором ВН (СТ ВН), обеспечивающим через собственную кинематическую связь с установленным вооружением (В) его дистанционное механическое расстопоривание,
при этом третий и четвертый выходы блока силовых ключей (БСК) блока управления (БУ) электрически связаны соответственно с блоком пиропатронным (БП) и электроспуском вооружения (ЭСВ), механически связанными с установленным вооружением (В).
Сопоставительный анализ с прототипом показывает, что заявляемая система дистанционного управления вооружением отличается наличием новых элементов:
- редуктор ГН,
- электродвигатель ГН,
- электродвигатель ВН,
- задающее устройство стабилизации с датчиками положения независимого стабилизированного в пространстве инерциального объекта по ГН и ВН,
- устройство отображения видеоинформации,
- пульт управления оператора, включающий:
- датчик положения рукоятки по ГН,
- датчик положения рукоятки по ВН,
- информационно-управляющая система вооружения,
- датчик положения вращающейся платформы, включающий:
- датчик положения,
- формирователь сигналов последовательной шины,
- датчик положения вооружения, включающий:
- датчик положения,
- формирователь сигналов последовательной шины,
- датчик абсолютной угловой скорости по ГН, включающий:
- датчик абсолютной угловой скорости,
- формирователь сигналов последовательной шины,
- датчик абсолютной угловой скорости по ВН, включающий:
- датчик абсолютной угловой скорости,
- формирователь сигналов последовательной шины,
- электромеханический стопор ГН,
- электромеханический стопор ВН,
- блок пиропатронный,
- электроспуск установленного вооружения,
- усилитель мощности привода ГН, включающий:
- формирователь сигналов последовательной шины усилителя ГН,
- контроллер широтно-импульсного модулятора усилителя ГН,
- широтно-импульсный модулятор ГН,
- усилитель ГН, датчик тока усилителя ГН,
- датчик скорости вала электродвигателя ГН,
- усилитель мощности привода ВН, включающий:
- формирователь сигналов последовательной шины усилителя ВН,
- контроллер широтно-импульсного модулятора усилителя ВН,
- широтно-импульсный модулятор ВН,
- усилитель ВН, датчик тока усилителя ВН,
- датчик скорости вала электродвигателя ВН,
- блок управления, включающий:
- первый формирователь сигналов последовательной шины,
- второй формирователь сигналов последовательной шины,
- третий формирователь сигналов последовательной шины,
- контроллер вычисления сигналов управления,
- блок силовых ключей,
- первая последовательная шина,
- вторая последовательная шина,
- третья последовательная шина,
и их связями с другими элементами системы.
Сравнение заявляемого решения с другими техническими решениями показывает, что вновь вводимые элементы достаточно хорошо известны в технике, но их введение в указанной связи в систему позволяет:
- повысить эффективность ведения прицельного огня из установленного вооружения, особенно при движении объекта военного назначения с установленной СДУВ, за счет введения в ее структуру приводов ГН и ВН и дополнительных устройств, позволяющих обеспечить 2-х плоскостную стабилизацию и стабилизированное наведение установленного вооружения;
- повысить эффективность использования боеприпасов установленного вооружения, за счет введения в цепи стрельбы блокировки по ошибке приводов ГН и ВН, а именно функции зоны разрешения выстрела, форма которой по ГН и ВН определяется выбранным (установленным) типом (типами) вооружения;
- уменьшить время подготовки первого выстрела и повысить вероятность попадания его в цель, за счет использования в структуре предлагаемой системы функции баллистического вычислителя, которая позволяет вести стрельбу из установленного вооружения с учетом баллистических поправок по ГН и ВН (выдаваемых из ИУСВ и учитывающих дальность до цели, тип боеприпаса, угол и скорость цели, скорость ветра, угол места цели, скорость собственного движения и т.п.), влияющих на повышение точности ведения огня;
- повысить безопасность экипажа и исключить возможность поражения собственным вооружением элементов модуля ОВН, кинематически связанных с местом установки СДУВ и находящихся в зоне углов обметания (обстрела) установленного вооружения, за счет наличия датчика положения вращающейся платформы по ГН и датчика положения вооружения по ВН, информация с которых, использованная в алгоритме управления, позволяет ввести дополнительные блокировки по цепям стрельбы в любых секторах обстрела, заданных геометрическими характеристиками конструкции ОВН;
- повысить удобство в управлении установленным вооружением ОВН, за счет наличия возможности управлять (наводить на цель) им дистанционно, что достигается наличием информационных каналов обмена (последовательных шин), пульта управления оператора и устройства отображения видеоинформации;
- дистанционно взводить установленное вооружение при помощи блока пиропатронного с возможностью контроля оставшегося количества пиропатронов;
- повысить эффективность одновременного наведения на цель установленного вооружения в плоскостях ГН и ВН, за счет наличия единого органа управления - пульта управления оператора;
- обеспечить автоматическое приведение и стопорение установленного вооружения на заданных конструкцией объекта военного назначения углах при его загрузке новым боекомплектом или установки в походное положение (при выключении системы дистанционного управления вооружением), за счет наличия датчика положения вращающейся платформы по ГН, датчика положения вооружения по ВН, информация с которых используется в алгоритме управления, и электромеханических стопоров по ГН и ВН;
- исключить механическую связь вращающейся платформы и люльки с установленным вооружением с датчиками положения независимого стабилизированного в пространстве инерциального объекта по ГН и ВН задающего устройства стабилизации, что обеспечивается введением в систему датчика положения вооружения по ВН и датчика положения вращающейся платформы по ГН. Сигналы относительного положения установленного вооружения с датчиков положения по ГН и ВН алгебраически суммируются с соответствующими сигналами датчиков положения независимого стабилизированного в пространстве инерциального объекта по ГН и ВН задающего устройства стабилизации и представляют собой сигналы ошибок по ГН и ВН, отрабатываемых приводами ГН и ВН;
- обеспечить независимую (автономную) стабилизацию (функционирование) системы дистанционного управления вооружением от основного вооружения ОВН, что достигается наличием задающего устройства стабилизации с датчиками положения независимого стабилизированного в пространстве инерциального объекта по ГН и ВН, датчика положения вращающейся платформы по ГН и датчика положения вооружения по ВН, датчиков абсолютной угловой скорости ГН и ВН, информация с которых используется в алгоритме обработки БУ, а также устройства отображения видеоинформации;
- обеспечить режим автономной стабилизации системы дистанционного управления вооружением при выходе из строя используемого внешнего задающего устройства стабилизации, за счет наличия датчиков абсолютной угловой скорости ГН и ВН, пульта управления оператора;
- повысить эксплуатационные характеристики и возможности диагностики системы дистанционного управления вооружением, за счет возможности подключения к ней как внешних, так и внутренних контрольных устройств по информационным каналам обмена через последовательные шины.
Изобретение может найти применение в конструкции танков, боевых машин пехоты, бронетранспортеров, а также в стационарно-размещенных военных объектах и позволяет расположить оператора управления вооружением, внешние задающие устройства стабилизации и само вооружение на расстоянии друг от друга. Это позволяет расширить конструктивные и боевые возможности, боевую мощь объекта применения с предлагаемым изобретением системой, а также значительно повысить безопасность оператора в реальных боевых условиях.
На Фиг. 1 приведена структурная схема системы-прототипа ЗПУ;
На Фиг. 2 приведена структурная схема заявляемой системы дистанционного управления вооружением.
Сокращения, принятые в тексте и на Фиг. 2:
БП - блок пиропатронный (на фиг. 2 - поз. 50);
БСК - блок силовых ключей (на фиг. 2 - поз. 11);
БУ - блок управления (на фиг. 2 - поз. 7);
В - установленное вооружение (на фиг. 2 - поз. 23);
ДДС - дальность действительной стрельбы;
ДП - датчик положения (на фиг. 2 - поз. 20, 39);
ДПВ - датчик положения вооружения (на фиг. 2 - поз. 36);
ДГТВП - датчик положения вращающейся платформы (на фиг. 2 - поз. 17);
ДПР-ВН - датчик положения рукоятки по ВН (на фиг. 2 - поз. 1.1);
ДПР-ГН - датчик положения рукоятки по ГН (на фиг. 2 - поз. 1.2);
ДТ ВН - датчик тока усилителя ВН (на фиг. 2 - поз. 46);
ДТ ГН - датчик тока усилителя ГН (на фиг. 2 - поз. 30);
ДУС - датчик абсолютной угловой скорости (на фиг. 2 - поз. 40, 21);
ДУС-ВН - датчик абсолютной угловой скорости по ВН (на фиг. 2 - поз. 38);
ДУС-ГН - датчик абсолютной угловой скорости по ГН (на фиг. 2 - поз. 19);
ЗПУ - зенитно-пулеметная установка;
ЗУС - задающее устройство стабилизации с датчиками положения независимого стабилизированного в пространстве инерциального объекта по ГН и ВН (на фиг. 2 - поз. 2);
ИУСВ - информационно-управляющая система вооружения (на фиг. 2 - поз. 4);
КВСУ - контроллер вычисления сигналов управления (на фиг. 2 - поз. 8);
КШИМ УВН - контроллер ШИМ усилителя ВН (на фиг. 2 - поз. 41);
КШИМ УГН - контроллер ШИМ усилителя ГН (на фиг. 2 - поз. 25);
ОВН - объект военного назначения;
П - вращающаяся платформа (на фиг. 2 - поз. 22);
ПД - прицел диоптрический (на фиг. 2 - поз. 24);
ПУО - пульт управления оператора (на фиг. 2 - поз. 1);
ПШ1 - первая последовательная шина (на фиг. 2 - поз. 5);
ПШ2 - вторая последовательная шина (на фиг. 2 - поз. 12);
ПШ3 - третья последовательная шина (на фиг. 2 - поз. 15);
Р-ВН - рукоятка маховика по ВН;
Р-ГН - рукоятка управления по ГН;
Ред.ВН - редуктор ВН (на фиг. 2 - поз. 45);
Ред.ГН - редуктор ГН (на фиг. 2 - поз. 29);
СДУВ - система дистанционного управления вооружением;
СК ВН - датчик скорости вала электродвигателя ВН (на фиг. 2 - поз. 47);
СК ГН - датчик скорости вала электродвигателя ГН (на фиг. 2 - поз. 31);
СМ - спусковой механизм;
СТ ВН - электромеханический стопор ВН (на фиг. 2 - поз. 48);
СТ ГН - электромеханический стопор ГН (на фиг. 2 - поз. 32);
У-ВН - усилитель ВН (на фиг. 2 - поз. 43);
У-ГН - усилитель ГН (на фиг. 2 - поз. 27);
УМВН - усилитель мощности ВН (на фиг. 2 - поз. 34);
УМГН - усилитель мощности ГН (на фиг. 2 - поз. 14);
УОВ - устройство отображения видеоинформации (на фиг. 2 - поз. 3);
ФСПШ 1 - первый формирователь сигналов последовательной шины (на фиг. 2 - поз. 6);
ФСПШ 2 - второй формирователь сигналов последовательной шины (на фиг. 2 - поз. 9);
ФСПШ 3 - третий формирователь сигналов последовательной шины (на фиг. 2 - поз. 10);
ФСПШ ДП - формирователь сигналов последовательной шины датчика положения (на фиг. 2 - поз. 35, 16);
ФСПШ ДУС - формирователь сигналов последовательной шины датчика абсолютной угловой скорости (на фиг. 2 - поз. 37, 18);
ФСПШ УВН - формирователь сигналов последовательной шины усилителя ВН (на фиг. 2 - поз. 33);
ФСПШ УГН - формирователь сигналов последовательной шины усилителя ГН (на фиг. 2 - поз. 13);
ШИМ ВН - широтно-импульсный модулятор усилителя ВН (на фиг. 2 - поз. 42);
ШИМ ГН - широтно-импульсный модулятор усилителя ГН (на фиг. 2 - поз. 26);
ЭД-ВН - электродвигатель ВН (на фиг. 2 - поз. 44);
ЭД-ГН - электродвигатель ГН (на фиг. 2 - поз. 28);
ЭСВ - электроспуск вооружения (на фиг. 2 - поз. 49).
СДУВ работает следующим образом:
Заявляемая система дистанционного управления вооружением представляет собой два независимо работающих привода наведения и стабилизации в плоскостях горизонтального наведения ГН и вертикального наведения ВН.
Привод ГН содержит пульт управления оператора (ПУО) 1 с датчиком положения рукоятки по ГН (ДПР-ГН) 1.1, задающее устройство стабилизации с датчиком положения независимого стабилизированного в пространстве инерциального объекта по ГН (ЗУС) 2, электрически связанное с устройством отображения видеоинформации (УОВ) 3, информационно-управляющую систему вооружения (ИУСВ) 4.
Электрический сигнал пульта управления оператора (ПУО) 1 по ГН, электрические сигналы задающего устройства стабилизации (ЗУС) 2, устройства отображения видеоинформации (УОВ) 3, информационно-управляющей системы вооружения (ИУСВ) 4 электрически связаны с первой последовательной шиной (ПШ1) 5, представляющей собой дублированную линию передачи сигналов последовательного протокола типа CAN и «Манчестер», и через (ПШ1) 5 электрически связаны с первым формирователем сигналов последовательной шины (ФСПШ 1) 6 блока управления (БУ) 7, представляющим собой контроллер для обработки сигналов по протоколу типа CAN и «Манчестер», который в свою очередь связан с контроллером вычисления сигналов управления (КВСУ) 8, представляющим собой процессорный модуль для обработки цифровых сигналов.
В свою очередь (КВСУ) 8 связан со вторым формирователем сигналов последовательной шины (ФСПШ 2) 9, представляющим собой контроллер для обработки сигналов по протоколам типа CAN и RS422, третьим формирователем сигналов последовательной шины (ФСПШ 3) 10, представляющим собой контроллер для обработки сигналов по протоколу типа CAN, а также с блоком силовых ключей (БСК) 11 через собственный дискретный порт ввода-вывода.
Второй формирователь сигналов последовательной шины (ФСПШ 2) 9 блока управления (БУ) 7 электрически связан со второй последовательной шиной (ПШ2) 12, представляющей собой дублированную линию передачи сигналов последовательных протоколов типа CAN и RS422, и через нее с формирователем сигналов последовательной шины усилителя ГН (ФСПШ УГН) 13 усилителя мощности ГН (УМГН) 14, представляющим собой контроллер для обработки сигналов по протоколам типа CAN и RS422.
Третий формирователь сигналов последовательной шины (ФСПШ 3) 10 блока управления (БУ) 7 электрически связан с третьей последовательной шиной (ПШ3) 15, представляющей собой линию передачи сигналов последовательного протокола типа CAN, и через нее связан с формирователем сигналов последовательной шины датчика положения (ФСПШ ДП) 16 датчика положения вращающейся платформы (ДПВП) 17 и формирователем сигналов последовательной шины датчика абсолютной угловой скорости (ФСПШ ДУС) 18 датчика абсолютной угловой скорости ГН (ДУС-ГН) 19, представляющими собой контроллер для обработки сигналов по протоколу типа CAN. Формирователь сигналов последовательной шины датчика положения (ФСПШ ДП) 16 датчика положения вращающейся платформы (ДПВП) 17 электрически связан с датчиком положения (ДП) 20. Формирователь сигналов последовательной шины датчика абсолютной угловой скорости (ФСПШ ДУС) 18 датчика абсолютной угловой скорости ГН (ДУС-ГН) 19 электрически связан с датчиком абсолютной угловой скорости (ДУС) 21. Датчик положения вращающейся платформы (ДПВП) 17 кинематически, через погон связан с вращающейся платформой (П) 22. Датчик абсолютной угловой скорости ГН (ДУС-ГН) 19 жестко связан с установленным вооружением (В) 23, с которым в свою очередь через механическую связь закреплен прицел диоптрический (ОД) 24.
(ФСПШ УГН) 13 усилителя мощности ГН (УМГН) 14 электрически связан с контроллером вычисления ШИМ усилителя ГН (КШИМ УГН) 25, представляющим собой процессорный модуль обработки сигналов, который в свою очередь электрически связан с широтно-импульсным модулятором ГН(ШИМГН) 26.
(ШИМ ГН) 26 электрически связан с усилителем ГН (У-ГН) 27 усилителя мощности ГН (УМГН) 14, первый выход которого электрически связан с обмотками электродвигателя ГН (ЭД-ГН) 28, вал которого механически связан с редуктором ГН (Ред. ГН) 29, который, в свою очередь, механически связан с погоном вращающейся платформы (П) 22. Усилитель ГН (У-ГН) 27 усилителя мощности ГН (УМГН) 14 работает от напряжения бортовой сети ОВН.
Второй выход усилителя ГН (У-ГН) 27 усилителя мощности ГН (УМГН) 14 соединен с датчиком тока усилителя ГН (ДТ ГН) 30, а третий выход усилителя ГН (У-ГН) 27 с датчиком скорости вала электродвигателя ГН (СК ГН) 31, которые в свою очередь электрически соединены с контроллером широтно-импульсного модулятора усилителя ГН (КШИМ УГН) 25 и служат для выработки сигналов пропорциональных соответственно току электродвигателя ГН (ЭД-ГН) 28 и скорости вала электродвигателя ГН (ЭД-ГН) 28. Обработанные в (КШИМ УГН) 25 сигналы, пропорциональные току электродвигателя ГН (ЭД-ГН) 28 и скорости вала электродвигателя ГН (ЭД-ГН) 28, через (ФСПШ УГН) 13 усилителя мощности ГН (УМГН) 14 выдаются на вторую последовательную шину (ПШ2) 12 и через нее, и (ФСПШ 2) 9 блока управления (БУ) 7 поступают в контроллер вычисления сигналов управления (КВСУ) 8. Сигналы по току электродвигателя ГН (ЭД-ГН) 28 и скорости вала электродвигателя ГН (ЭД-ГН) 28 используются в алгоритме управления (БУ) 7, формирующим суммарный сигнал управления для усилителя мощности ГН (УМГН) 14, и позволяют поднять добротность контура (заданный коэффициент усиления), тем самым, обеспечив требуемые параметры по точности стабилизации привода ГН в целом.
Аналогично в контроллер вычисления сигналов управления (КВСУ) 8 через (ФСПШ 3) 10 и (ПШ3) 15 поступают сигналы с датчика абсолютной угловой скорости по ГН (ДУС-ГН) 19 и датчика положения вращающейся платформы (ДПВП) 17.
Полученное значение сигнала абсолютного положения по ГН от задающего устройства стабилизации (ЗУС) 2 и сигнала угловой поправки по ГН, полученной от информационно-управляющей системы вооружения (ИУСВ) 4, алгебраически суммируются (с учетом крутизны и знака) с сигналом датчика положения вращающейся платформы (ДПВП) 17, формируя сигнал ошибки привода ГН, используемый при стабилизации установленного вооружения (В) 23 от задающего устройства стабилизации (ЗУС) 2 по ГН (режим независимой стабилизации).
Одновременно для обеспечения резервного режима автономной стабилизации установленного вооружения в структуре программы (КВСУ) 8 предусмотрена функция цифрового интегратора привода ГН, служащего для преобразования цифрового сигнала полученного суммированием с заданными коэффициентами сигналов с пульта управления оператора (ПУО) 1 по ГН и датчика абсолютной угловой скорости по ГН (ДУС-ГН) 19 в ошибку (абсолютное угловое положение) привода ГН, используемую для автономной стабилизации установленного вооружения (В) 23 в случае отсутствия или выхода из строя задающего устройства стабилизации (ЗУС) 2 по ГН.
Выбор режима работы СДУВ осуществляется контроллером вычисления сигналов управления (КВСУ) 8 либо по сигналам от (ИУСВ) 4, либо по собственному алгоритму, автоматически определяющему состояние СДУВ, исключая тем самым аварийные режимы работы и обеспечивая надежность предлагаемой системы.
Полученный в результате вычисления сигнал ошибки привода ГН параллельно с основной задачей стабилизации установленного вооружения (В) 23 по ГН обеспечивает также работу одной из ветвей программы вычисления зоны разрешения выстрела по приводу ГН, реализованную в алгоритме (КВСУ) 8. Функция зоны разрешения выстрела по приводу ГН представляет собой алгоритм анализа (сравнения) действительной (вычисленной) текущей угловой амплитуды ошибки по ГН с максимальной угловой амплитудой заложенной в программе (КВСУ) 8, учитывающей соответственно конкретный вид установленного на СДУВ вооружения (В) 23. Этот алгоритм позволяет обеспечивать эффективность использования установленного вооружения (В) 23 на всех дальностях его применения, ограниченных только его техническими характеристиками, а именно ДДС (дальность действительной стрельбы). Функция зоны разрешения выстрела по приводу ГН работает по логической схеме «И» совместно с функцией зоны разрешения выстрела по приводу ВН, построенной по аналогичному алгоритму.
Сигнал функции зоны разрешения выстрела, сформированный как сумма условий по зонам разрешения выстрела по приводу ГН и приводу ВН (единый выход, общий для зоны разрешения выстрела), через порт ввода-вывода (КВСУ) 8 электрически связан с входом блока силовых ключей (БСК) 11, четвертый выход которого обеспечивает подачу команды на включение электроспуска установленного вооружения (В) 23 при отсутствии иных блокировок по цепям стрельбы, формируемых как самим блоком управления (БУ) 7, так и (ИУСВ) 4.
Контроллер вычисления сигналов управления (КВСУ) 8, в соответствии с заложенным алгоритмом, производит обработку поступивших в него сигналов от устройств (ПУО) 1, (ЗУС) 2, (УОВ) 3, (ИУСВ) 4, (ДПВП) 17, (ДУС-ГН) 19, а также сигналов, пропорциональных току электродвигателя ГН (ЭД-ГН) 28 и скорости вала электродвигателя ГН (ЭД-ГН) 28.
Контроллер вычисления сигналов управления (КВСУ) 8 через блок силовых ключей (БСК) 11 производит управление электромеханическим стопором ГН (СТ ГН) 32, который производит механическое расстопоривание вращающейся платформы (П) 22 с установленным вооружением (В) 23 или ее механическое стопорение на корпус ОВН.
В соответствии с выбранным оператором режимом работы в (КВСУ) 8 производится формирование сигнала управления приводом ГН, который через (ФСПШ 2) 9 блока управления (БУ) 7, вторую последовательную шину (ПШ2) 12 поступает в усилитель мощности ГН (УМГН) 14, где происходит формирование управления для электродвигателя ГН (ЭД-ГН) 28, который через редуктор ГН (Ред. ГН) 29 поворачивает вращающуюся платформу (П) 22, а вместе с ней установленное вооружение (В) 23 в направлении, заданном сигналом управления по ГН, формируемым задающим устройством стабилизации (ЗУС) 2, информационно-управляющей системой вооружения (ИУСВ) 4 и сигналом датчика положения вращающейся платформы (ДПВП) 17.
Блоки, используемые в приводе ГН, такие как - пульт управления оператора (ПУО) 1, задающее устройство стабилизации (ЗУС) 2, устройство отображения видеоинформации (УОВ) 3 информационно-управляющая система вооружения (ИУСВ) 4, первая последовательная шина (ПШ1) 5, вторая последовательная шина (ПШ2) 12, третья последовательная шина (ПШ3) 15, а также формирователи сигналов последовательной шины (ФСПШ 1) 6, (ФСПШ 2) 9, (ФСПШ 3) 10, (КВСУ) 8, блок силовых ключей (БСК) 11 блока управления (БУ) 7, прицел диоптрический (ПД) 24 работают совместно и с приводом ВН.
Привод ВН содержит пульт управления оператора (ПУО) 1 с датчиком положения рукоятки по ВН (ДПР-ВН) 1.2, задающее устройство стабилизации с датчиком положения независимого стабилизированного в пространстве инерциального объекта по ВН (ЗУС) 2, электрически связанное с устройством отображения видеоинформации (УОВ) 3, информационно-управляющую систему вооружения (ИУСВ) 4.
Электрический сигнал пульта управления оператора (ПУО) 1 по ВН, электрические сигналы задающего устройства стабилизации (ЗУС) 2, устройства отображения видеоинформации (УОВ) 3, информационно-управляющей системы вооружения (ИУСВ) 4 электрически связаны с первой последовательной шиной (ПИН) 5, представляющей собой дублированную линию передачи сигналов последовательного протокола типа CAN и «Манчестер», и через (ПШ1) 5 электрически связаны с первым формирователем сигналов последовательной шины (ФСПШ 1) 6 блока управления (БУ) 7, представляющим собой контроллер для обработки сигналов по протоколу типа CAN и «Манчестер», который в свою очередь связан с контроллером вычисления сигналов управления (КВСУ) 8, представляющим собой процессорный модуль обработки сигналов.
В свою очередь (КВСУ) 8 связан со вторым формирователем сигналов последовательной шины (ФСПШ 2) 9, представляющим собой контроллер для обработки сигналов по протоколам типа CAN и RS422, третьим формирователем сигналов последовательной шины (ФСПШ 3) 10, представляющим собой контроллер для обработки сигналов по протоколу типа CAN, а также с блоком силовых ключей (БСК) 11.
Второй формирователь сигналов последовательной шины (ФСПШ 2) 9 блока управления (БУ) 7 электрически связан со второй последовательной шиной (ПШ2) 12, представляющей собой дублированную линию передачи сигналов последовательных протоколов типа CAN и RS422, и через нее с формирователем сигналов последовательной шины усилителя ВН (ФСПШ УВН) 33 усилителя мощности ВН (УМВН) 34, представляющим собой контроллер для обработки сигналов по протоколам типа CAN и RS422.
Третий формирователь сигналов последовательной шины (ФСПШ 3) 10 блока управления (БУ) 7 электрически связан с третьей последовательной шиной (ПШ3) 15, представляющей собой линию передачи сигналов последовательного протокола типа CAN, и через нее связан с формирователем сигналов последовательной шины датчика положения (ФСПШ ДП) 35 датчика положения вооружения (ДПВ) 36 и формирователем сигналов последовательной шины датчика абсолютной угловой скорости (ФСПШ ДУС) 37 датчика абсолютной угловой скорости ВН (ДУС-ВН) 38, представляющими собой контроллер для обработки сигналов по протоколу типа CAN. Формирователь сигналов последовательной шины датчика положения (ФСПШ ДП) 35 датчика положения вооружения (ДПВ) 36 электрически связан с датчиком положения (ДП) 39. Формирователь сигналов последовательной шины датчика абсолютной угловой скорости (ФСПШ ДУС) 37 датчика абсолютной угловой скорости ВН (ДУС-ВН) 38 электрически связан с датчиком абсолютной угловой скорости (ДУС) 40. Датчик положения вооружения (ДПВ) 36 кинематически, через ось вращения, связан с установленным вооружением (В) 23. Датчик абсолютной угловой скорости ВН (ДУС-ВН) 38 жестко связан с установленным вооружением (В) 23, с которым механически связан прицел диоптрический (ПД) 24.
(ФСПШ УВН) 33 усилителя мощности ВН (УМВН) 34 электрически связан с контроллером вычисления ШИМ усилителя ВН (КШИМ УВН) 41, представляющим собой процессорный модуль обработки сигналов, который в свою очередь электрически связан с широтно-импульсным модулятором ВН(ШИМВН)42.
(ШИМ ВН) 42 электрически связан с усилителем ВН (У-ВН) 43 усилителя мощности ВН (УМВН) 34, первый выход которого электрически связан с обмотками электродвигателя ВН (ЭД-ВН) 44, вал которого механически связан с редуктором ВН (Ред. ВН) 45. Усилитель ВН (У-ВН) 43 усилителя мощности ВН (УМВН) 34 работает от напряжения бортовой сети ОВН.
Второй выход усилителя ВН (У-ВН) 43 усилителя мощности ВН (УМВН) 34 соединен с датчиком тока усилителя ВН (ДТ ВН) 46, а третий выход усилителя ВН (У-ВН) 43 с датчиком скорости вала электродвигателя ВН (СК ВН) 47, которые в свою очередь электрически соединены с контроллером широтно-импульсного модулятора усилителя ВН (КШИМ УВН) 41 и служат для выработки сигналов, пропорциональных соответственно току электродвигателя ВН (ЭД-ВН) 44 и скорости вала электродвигателя ВН (ЭД-ВН) 44. Обработанные в (КШИМ УВН) 41 сигналы, пропорциональные току электродвигателя ВН (ЭД-ВН) 44 и скорости вала электродвигателя ВН (ЭД-ВН) 44, через (ФСПШ УВН) 33 усилителя мощности ВН (УМВН) 34 выдаются на вторую последовательную шину (ПШ2) 12 и через нее и (ФСПШ 2) 9 блока управления (БУ) 7 поступают в контроллер вычисления сигналов управления (КВСУ) 8.
Аналогично в контроллер вычисления сигналов управления (КВСУ) 8 через (ФСПШ 3) 10 и (ПШ3) 15 поступают сигналы с датчика абсолютной угловой скорости по ВН (ДУС-ВН) 38 и датчика положения вооружения (ДПВ) 36.
Полученное значение сигнала абсолютного положения по ВН от задающего устройства стабилизации (ЗУС) 2 и сигнала угловой поправки по ВН, полученного от информационно-управляющей системы вооружения (ИУСВ) 4, алгебраически суммируются (с учетом крутизны и знака) с сигналом датчика положения вооружения (ДПВ) 36, формируя сигнал ошибки привода ВН, используемый при стабилизации установленного вооружения (В) 23 от задающего устройства стабилизации (ЗУС) 2 по ВН (режим независимой стабилизации).
Одновременно для обеспечения резервного режима автономной стабилизации установленного вооружения в структуре программы (КВСУ) 8 предусмотрена функция цифрового интегратора привода ВН, служащего для преобразования цифрового сигнала, полученного суммированием с заданными коэффициентами сигналов с пульта управления оператора (ПУО) 1 по ВН и датчика абсолютной угловой скорости по ВН (ДУС-ВН) 38 в ошибку (абсолютное угловое положение) привода ВН, используемую для автономной стабилизации установленного вооружения (В) 23, в случае отсутствия или выхода из строя задающего устройства стабилизации (ЗУС) 2 по ВН.
Выбор режима работы СДУВ осуществляется контроллером вычисления сигналов управления (КВСУ) 8 либо по сигналам от (ИУСВ) 4, либо по собственному алгоритму, автоматически определяющему состояние СДУВ, исключая тем самым аварийные режимы работы и обеспечивая надежность предлагаемой системы.
Полученный в результате вычисления сигнал ошибки привода ВН параллельно с основной задачей стабилизации установленного вооружения (В) 23 по ВН обеспечивает также работу одной из ветвей программы вычисления зоны разрешения выстрела по приводу ВН, реализованную в алгоритме (КВСУ) 8. Функция зоны разрешения выстрела по приводу ВН, представляет собой алгоритм анализа (сравнения) действительной (вычисленной) текущей угловой амплитуды ошибки по ВН с максимальной угловой амплитудой заложенной в программе (КВСУ) 8, учитывающей соответственно конкретный вид установленного на СДУВ вооружения (В) 23. Этот алгоритм позволяет обеспечивать эффективность использования установленного вооружения (В) 23 на всех дальностях его применения, ограниченных только его техническими характеристиками, а именно ДЦС. Функция зоны разрешения выстрела по приводу ВН работает по логической схеме «И» совместно с функцией зоны разрешения выстрела по приводу ГН, построенной по аналогичному алгоритму.
Сигнал функции зоны разрешения выстрела, сформированный как сумма условий по зонам разрешения выстрела по приводу ГН и приводу ВН (единый выход, общий для зоны разрешения выстрела) через порт ввода-вывода (КВСУ) 8 электрически связан с входом блока силовых ключей (БСК) 11, четвертый выход которого обеспечивает подачу команды на включение электроспуска установленного вооружения (В) 23 при отсутствии иных блокировок по цепям стрельбы, формируемых как самим блоком управления (БУ) 7, так и (ИУСВ) 4.
Контроллер вычисления сигналов управления (КВСУ) 8, в соответствии с заложенным алгоритмом, производит обработку поступивших в него сигналов от устройств (ПУО) 1, (ЗУС) 2, (УОВ) 3, (ИУСВ) 4, (ДПВ) 36, (ДУС-ВН) 38, а также сигналов, пропорциональных току электродвигателя ВН (ЭД-ВН) 44 и скорости вала электродвигателя ВН (ЭД-ВН) 44.
Контроллер вычисления сигналов управления (КВСУ) 8 через блок силовых ключей (БСК) 11 производит управление электромеханическим стопором ВН (СТ ВН) 48, который производит механическое расстопоривание люльки с установленным вооружением (В) 23 или ее механическое стопорение на корпус вращающейся платформы (П) 22.
В соответствии с выбранным оператором режимом работы в (КВСУ) 8 производится формирование сигнала управления приводом ВН, который через (ФСПШ 2) 9 блока управления (БУ) 7, вторую последовательную шину (ПШ2) 12 поступает в усилитель мощности ВН (УМВН) 34, где происходит формирование управления для электродвигателя ВН (ЭД-ВН) 44, который через редуктор ВН (Ред. ВН) 45 поворачивает установленное вооружение (В) 23 в направлении, заданном сигналом управления по ВН, формируемым задающим устройством стабилизации (ЗУС) 2, информационно-управляющей системой вооружения (ИУСВ) 4 и сигналом датчика положения вооружения (ДПВ) 36.
По командам с пульта управления оператора (ПУО) 1, через первую последовательную шину (ПШ1) 5, и через (ФСПШ 1) 6, (КВСУ) 8, блок силовых ключей (БСК) 11 блока управления (БУ) 7, силовые электрические сигналы поступают на электроспуск вооружения (ЭСВ) 49 и блок пиропатронный (БП) 50, которые механически связаны с установленным вооружением (В) 23 и служат соответственно для дистанционного производства выстрела и взведения установленного вооружения (В) 23.
Блоки, используемые в приводе ВН, такие как - пульт управления оператора (ПУО) 1, задающее устройство стабилизации (ЗУС) 2, устройство отображения видеоинформации (УОВ) 3 информационно-управляющая система вооружения (ИУСВ) 4, первая последовательная шина (ПНИ) 5, вторая последовательная шина (ГШ12) 12, третья последовательная шина (ПШ3) 15, а также формирователи сигналов последовательной шины (ФСПШ 1) 6, (ФСПШ 2) 9, (ФСПШ 3) 10, (КВСУ) 8, блок силовых ключей (БСК) 11 блока управления (БУ) 7, прицел диоптрический (ПД) 24 работают совместно и с приводом ГН.
Большинство новых элементов заявляемой системы реализованы как часть программного обеспечения блока управления, усилителей и датчиков, при этом обработка получаемых и передаваемых данных осуществляется несколькими контроллерами вычисления сигналов управления, положения и скорости, состоящих в основном из:
- формирователей сигналов последовательных шин типа CAN, RS422, «Манчестер», SPI, I2S;
- формирователя сигнала широтно-импульсного модулятора;
- дискретного ввода - вывода
- силовых транзисторных ключей.
Процедура вычисления контроллером блока управления сигналов управления выполнена в виде подпрограмм управления со звеньями коррекции по ГН и ВН, представляющими собой цифровые фильтры 1-го и 2-го порядка, полученные билинейным преобразованием аналоговых прототипов, причем частота обработки полученных контроллером блока управления данных и выдача им сигналов управления через последовательные шины на усилители приводов ГН и ВН будет определяться заданной частотой циклов обработки сигналов блоком управления и частотой обмена по последовательным шинам с информационно-управляющей системой вооружения, датчиками и усилителями приводов ВН и ГН.
Выходной каскад усилителя мощности может быть выполнен по мостовой схеме, построенной на транзисторных сборках, управляемых в режиме широтно-импульсной модуляции (ШИМ) сигналами ШИМ, формируемыми контроллером ШИМ и усиленными драйверами ШИМ.
(См. книгу под редакцией Богнера Р. и Константинидиса А. «Введение в цифровую фильтрацию» пер. с англ. - М.: Мир, 1976).
(См. книгу Хоровиц П., Хилл У. «Искусство схемотехники», пер. с англ. - 4-е изд. перераб. и доп. - М.: Мир, 1993).
Принцип действия приводов ГН и ВН одинаков и основан на том, что каждый из этих двух приводов представляет собой систему автоматического регулирования, работа которой основана на принципе отработки рассогласования (ошибки), т.е. на сравнении действительного значения регулируемого параметра с его заданным значением. Направление в горизонтальной и вертикальной плоскости, которое требуется придать установленному вооружению, является заданным значением регулируемого параметра для приводов ГН и ВН.
При движении объекта применения СДУВ на установленное вооружение действуют внешние возмущения в виде колебаний вращающейся платформы с установленным вооружением, моментов трения в погоне (опоре вращающейся платформы установки СДУВ на корпус), редукторах приводов ГН и ВН, электродвигателях приводов ГН и ВН, трения в цапфах (опорах) люльки с установленным вооружением, а также возмущения, обусловленные неуравновешенностью вращающейся платформы СДУВ относительно центра ее вращения и неуравновешенностью установленного вооружения относительно оси цапф.
Эти возмущения вызывают отклонение установленного вооружения от заданного направления. Угол между заданным и действительным направлением, в этом случае, определяет значение сигнала ошибки стабилизации приводов ГН и ВН.
Значение сигнала, пропорциональное ошибке стабилизации, отрабатывается приводами СДУВ, поворачивающими установленное вооружение в сторону уменьшения ошибки.
Система дистанционного управления вооружением работает следующим образом.
Сигналы с датчиков положения независимого стабилизированного в пространстве инерциального объекта по ГН и ВН задающего устройства стабилизации (ЗУС) 2, сигналы с пульта управления оператора (ПУО) 1, сигналы из информационно-управляющей системы вооружения (ИУСВ) 4, сигналы с датчиков абсолютной угловой скорости ГН (ДУС-ГН) 19 и ВН (ДУС-ВН) 38, сигналы с датчика положения вращающейся платформы по ГН (ДПВП) 17 и датчика положения вооружения по ВН (ДПВ) 36, сигналы с усилителей мощности ГН (УМГН) 14 и ВН (УМВН) 34 формируют в контроллере вычисления сигналов управления (КВСУ) 8 блока управления (БУ) 7 сигналы относительного положения, сигналы по абсолютной угловой скорости, сигналы по абсолютному положению, сигналы о величине баллистической поправки, сигналы скорости цели, сигналы обратных связей по скорости вращения вала и току электродвигателей по ГН и ВН, которые в соответствии с алгоритмом управления формируют ошибки приводов ГН и ВН.
Функция зоны разрешения выстрела, реализованная как подпрограмма в (КВСУ) 8, анализирует амплитуду угловых значений ошибок приводов ГН и ВН и скорость подхода установленного вооружения (В) 23 к этой зоне и в случае превышения этих параметров свыше установленных значений блокирует цепи стрельбы установленного вооружения (В) 23, тем самым исключая возможность производства оператором СДУВ летящего мимо цели выстрела (даже при нажатой оператором кнопке стрельбы), что повышает эффективность использования боеприпасов.
Стабилизация в режиме ОСНОВНОЙ (режим независимой стабилизации) установленного вооружения (В) 23 осуществляется по алгебраической разности сигналов с задающего устройства стабилизации (ЗУС) 2, формирующего по цифровому каналу обмена в контроллере вычисления сигналов управления (КВСУ) 8 блока управления (БУ) 7 сигналы абсолютного положения по ГН и ВН с учетом угловых поправок по ГН и ВН, и соответствующими сигналами с датчика положения вращающейся платформы (ДГТВП) 17 и датчика положения вооружения (ДПВ) 36.
Полученные таким образом алгебраические разности сигналов по ГН и ВН представляют собой соответственно ошибки приводов по ГН и ВН, коммутируемые в соответствии с выбранным режимом работы ОВН по сигналам из информационно-управляющей системы вооружения (ИУСВ) 4 и пульта управления оператора (ПУО) 1.
Далее, полученные сигналы ошибок по ГН и ВН фильтруются и суммируются с соответствующими сигналами отрицательных обратных связей по абсолютной угловой скорости установленного вооружения по ГН и ВН, формируемых по сигналам с датчиков абсолютной угловой скорости (ДУС-ГН) 19, (ДУС ВН) 38, установленных на установленном вооружении (В) 23.
Причем контур ошибки привода ГН дополнительно охвачен сигналами отрицательных обратными связей по току и скорости вращения вала исполнительного электродвигателя ГН (ЭД-ГН) 28, формируемых датчиком тока усилителя ГН (ДТ ГН) 30 и датчиком скорости вала электродвигателя ГН (СК ГН) 31 усилителя мощности (УМГН) 14.
Контур ошибки привода ВН дополнительно охвачен сигналами отрицательных обратными связей по току и скорости вращения вала исполнительного электродвигателя ВН (ЭД-ВН) 44, формируемых датчиком тока усилителя. ВН (ДТ ВН) 46 и датчиком скорости вала электродвигателя ВН (СК ВН) 47 усилителя мощности (УМВН) 34.
Указанные сигналы обратных связей, позволяют повысить добротность и устойчивость приводов ГН и ВН, тем самым, обеспечив требуемое качество управления приводами ГН и ВН, что в сумме с цифровыми алгоритмами управления позволяет уменьшить ошибку стабилизации установленного вооружения (В) 23 по ГН и ВН.
Одновременно с указанными сигналами обратных связей в (КВСУ) 8 блока управления (БУ) 7 подаются сигналы относительной скорости установленного вооружения (В) 23 и вращающейся платформы (П) 22 соответственно по ВН и ГН, полученные корректирующими звеньями методом дифференцирования соответствующих сигналов с датчика положения вооружения по ВН (ДПВ) 36 и датчика положения вращающейся платформы по ГН (ДПВП) 17.
Полученные сигналы относительной скорости установленного вооружения (В) 23 по ВН и ГН представляют собой обратную связь по возмущению, воздействующему соответственно на установленное вооружение (В) 23 и вращающуюся платформу (П) 22 в плоскостях ВН и ГН при движении ОВН. Введение указанных обратных связей по возмущению в контуры управления приводами ВН и ГН позволяет дополнительно повысить точность стабилизации установленного вооружения (В) 23.
Таким образом, полученные и обработанные в (КВСУ) 8 блока управления (БУ) 7 сигналы управления по ГН и ВН поступают на соответствующие усилители ГН (УМГН) 14 и ВН (УМВН) 34, формирующие соответственно сигналы управления для исполнительного электродвигателя ГН (ЭД-ГН) 28, и исполнительного электродвигателя ВН (ЭД-ВН) 44.
Полученные сигналы управления по ГН и ВН преобразуются соответственно в силовые сигналы для управления обмотками электродвигателя ГН (ЭД-ГН) 28 и электродвигателя ВН (ЭД-ВН) 44, обеспечивающие вращение вала электродвигателя ГН (ЭД-ГН) 28 и электродвигателя ВН (ЭД-ВН) 44 соответственно.
Электродвигатель ГН (ЭД-ГН) 28 механически связан с редуктором ГН (Ред. ГН) 29, электродвигатель ВН (ЭД-ВН) 44 механически связан с редуктором ВН (Ред. ВН) 45, которые в свою очередь кинематически связаны соответственно с вращающейся платформой (П) 22 и установленным вооружением (В) 23 и поворачивают соответственно вращающуюся платформу (П) 22 по ГН и установленное вооружение (В) 23 по ВН в сторону уменьшения полученных ошибок стабилизации по ГН и ВН, тем самым удерживая направление установленного вооружения (В) 23 на цель, заданное задающим устройством стабилизации (ЗУС) 2 с учетом информации о баллистических поправках, поступающей в контроллер вычисления сигналов управления (КВСУ) 8 из информационно-управляющей системы вооружения (ИУСВ) 4 и соответствующих сигналов с датчика положения вращающейся платформы (ДПВП) 17 и датчика положения вооружения (ДПВ) 36.
Блок силовых ключей (БСК) 11 по командам от контроллера вычисления сигналов управления (КВСУ) 8 блока управления (БУ) 7, по сигналам от пульта управления оператора (ПУО) 1 и информационно-управляющей системы вооружения (ИУСВ) 4 управляет работой электромеханических стопоров ГН (СТ ГН) 32 и ВН (СТ ВН) 48, которые обеспечивает стопорение (расстопоривание) вращающейся платформы (П) 22 и установленного вооружения (В) 23 в случае аварийного (рабочего) или несанкционированного оператором(ами) и информационно управляющей системой вооружения (ИУСВ) 4 поведения приводов ГН и ВН.
Наведение в режиме ОСНОВНОЙ установленного вооружения (В) 23 осуществляется по сигналам задающего устройства стабилизации (ЗУС) 2, связанного электрически через первую последовательную шину (ПШ 1) 5 с пультом управления оператора (ПУО) 1 по ГН, ВН и формирующего по цифровому каналу обмена в (КВСУ) 8 блока управления (БУ) 7 абсолютные угловые положения по ГН и ВН, необходимые, как описано выше, для формирования соответствующих ошибок приводов по ГН и ВН. Наводчик (оператор) ОВН пультом управления оператора (ПУО) 1 по ГН и ВН наводит стабилизированную в двух плоскостях линию визирования (прицельную марку) задающего устройства стабилизации (ЗУС) 2 на цель по изображению на устройстве отображения видеоинформации (УОВ) 3. Сигналы абсолютного углового положения с датчиков положения ГН и ВН задающего устройства стабилизации (ЗУС) 2, пропорциональные ошибкам стабилизации по ГН и ВН, отрабатываются приводами ГН и ВН, поворачивающими установленное вооружение (В) 23 в сторону уменьшения ошибок ГН и ВН, аналогично рассмотренному выше режиму стабилизации в режиме ОСНОВНОЙ.
Для компенсации скоростной ошибки в плоскостях ГН и ВН сигналы с датчиков положения рукояток по ГН (ДПР-ГН) 1.1 и ВН (ДПР-ВН) 1.2 пульта управления оператора (ПУО) 1 через (ПШ1) 5 и (ФСПШ1) 6 одновременно поступают в контроллер вычисления сигналов управления (КВСУ) 8 блока управления (БУ) 7, где добавляются в скоростной контур коррекции и управления алгоритма вычисления ошибки в плоскостях ГН и ВН.
Стабилизация в режиме РЕЗЕРВНЫЙ (режим автономной стабилизации) стабилизация осуществляется по сигналам датчиков абсолютной угловой скорости (ДУС-ГН) 19 и (ДУС-ВН) 38, жестко связанных с установленным вооружением (В) 23. Сигналы датчиков абсолютной угловой скорости (ДУС-ГН) 19 и (ДУС-ВН) 38 подаются через третью последовательную шину (ПШ3) 15, третий формирователь сигналов последовательной шины (ФСПШ 3) 10 в контроллер вычисления сигналов управления (КВСУ) 8 блока управления (БУ) 7. Контроллер вычисления сигналов управления (КВСУ) 8 блока управления (БУ) 7 производит обработку полученных сигналов с датчиков абсолютной угловой скорости (ДУС-ГН) 19 и (ДУС-ВН) 38 методом цифрового интегрирования. В результате значения абсолютной угловой скорости преобразуется в значения абсолютного углового положения (ошибки) по ГН и ВН. Полученные ошибки приводов по ГН и ВН фильтруются и суммируются с соответствующими коэффициентами с сигналами отрицательных обратных связей аналогично стабилизации в режиме ОСНОВНОЙ и далее через вторую последовательную шину (ПШ2) 12 поступают на соответствующие усилители мощности (УМГН) 28 и (УМВН) 34. Алгоритм дальнейшей работы приводов ГН и ВН СДУВ резервного режима автономной стабилизации установленного вооружения приводами ГН и ВН аналогичен описанному выше основному режиму стабилизации.
Наведение в режиме РЕЗЕРВНЫЙ установленного вооружения (В) 23 осуществляется по сигналам наведения с пульта управления оператора (ПУО) 1 по ГН, ВН. Сигналы по ГН и ВН с пульта управления оператора (ПУО) 1 через первую последовательную шину (ПШ 1) 5 связаны с первым формирователем сигналов последовательной шины (ФСПШ 1) 6 блока управления (БУ) 7, через который поступают в контроллер вычисления сигналов управления (КВСУ) 8 блока управления (БУ) 7, где производится их суммирование с соответствующими коэффициентами с соответствующими значениями, полученными в результате цифрового интегрирования сигналов датчиков абсолютной угловой скорости (ДУС-ГН) 19 и (ДУС-ВН) 38. Таким образом, полученные сигналы, пропорциональные ошибкам стабилизации по ГН и ВН, отрабатываются приводами ГН и ВН СДУВ, поворачивающими установленное вооружение (В) 23 в сторону уменьшения ошибок по ГН и ВН, аналогично рассмотренному выше режиму наведения в режиме ОСНОВНОЙ.
Таким образом, заявляемая в качестве изобретения система управления дает возможность дистанционно наводить и стабилизировать вооружение за счет возможности размещения оператора вне установки, определяемой конструкцией ОВН и внутренней его компоновкой, удобной для работы оператора СУ ДНУ. Предложенная схема системы значительно расширяет возможности ее применения на объектах военной и спецтехники, на которых предусматривается установка различных видов (типов) вооружения.
Предложенное изобретением построение СДУВ может быть реализовано в нескольких вариантах исполнения (определяется требованием заказчика), а именно:
- как законченный боевой модуль, установка которого на ОВН или спецобъект сводится только к указанию места его крепления на наружной поверхности объекта, мест ввода и подключения кабеля в защищенном корпусе объекта и мест установки в защищенном корпусе объекта пульта управления с устройством отображения видеоинформации, а также к указанию геометрических параметров объекта, определяющих запретные зоны стрельбы и углы стопорения выбранного вооружения;
- как разнесенная система управления и стабилизации, позволяющая размещать установку с вооружением, задающее устройство стабилизации и рабочее место оператора с пультом управления и устройством отображения видеоинформации на заданном от конструкции ОВН или спецобъекта расстоянии;
- как система управления и стабилизации имеющая в своем составе одну или более установок с вооружением, работающих синхронно с одним задающим устройством стабилизации и информационно управляющей системой вооружения, учитывающей кроме известных поправок и поправку на параллакс для каждой установки с вооружением, определяемого геометрическими координатами их расположения;
- как система, обеспечивающая стабилизацию и стабилизированное наведение установленного вооружения при отсутствии дорогостоящего задающего устройства стабилизации, что значительно снижает цену СДУВ и в некоторых случаях является решающим фактором ее применения.
СДУВ позволяет применять разные виды вооружения, установка которых определяется требованием заказчика, а именно:
- пулеметы: 7,62-мм ПКТ, 12,7-мм КОРД, ПКМ "Печенег";
- гранатометы: 30-мм АГ-17, АГ-30М или 40-мм АГС-40 "Балкан";
- ракетные комплексы ПВО;
- противотанковые ракетные комплексы.
При этом система позволяет устанавливать одновременно разные типы вооружения, вводя в информационно управляющую систему вооружения параметры сразу для нескольких типов боеприпасов. Тип выбранного боеприпаса определяет оператор СДУВ исходя из боевой обстановки и целей необходимых к поражению.
Приведенные в описании технические преимущества, целесообразность и надежность системы, реализованной по заявляемой структурной схеме, подтверждены испытаниями опытного образца на испытательной базе ОАО «СКБ ПА», ОАО «КЭМЗ» г. Ковров, ОАО «УКБТМ» и ОАО «НПК Уралвагонзавод» г. Нижний Тагил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2014 |
|
RU2553712C1 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2018 |
|
RU2682086C1 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2018 |
|
RU2789421C1 |
| СИСТЕМА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ВООРУЖЕНИЯ | 2014 |
|
RU2555184C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2551626C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2010 |
|
RU2430326C1 |
| СИСТЕМА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2548941C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ ДИСТАНЦИОННО УПРАВЛЯЕМОГО БОЕВОГО МОДУЛЯ | 2016 |
|
RU2629732C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2013 |
|
RU2525148C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2015 |
|
RU2593931C1 |
Система дистанционного управления вооружением относится к системам автоматического управления и регулирования. Система содержит вращающуюся платформу с механическим погоном, редукторы вертикального наведения (ВН) и горизонтального наведения (ГН), вооружение с прицелом диоптрическим, пульт управления оператора, задающее устройство стабилизации с датчиками положения, устройство отображения видеоинформации, информационно-управляющую систему вооружения, блок управления, усилители мощности ГН и ВН, электродвигатели ВН и ГН, датчик положения вращающейся платформы, датчик положения вооружения, датчик абсолютной угловой скорости по ВН и ГН, электромеханические стопоры ВН и ГН, блок пиропатронный, электроспуск установленного вооружения, три последовательных шины ПШ1-ПШ3. Обеспечивается высокая эффективность ведения прицельного огня, высокая эффективность использования боеприпасов, уменьшение времени подготовки выстрела, повышение безопасности экипажа. 2 ил.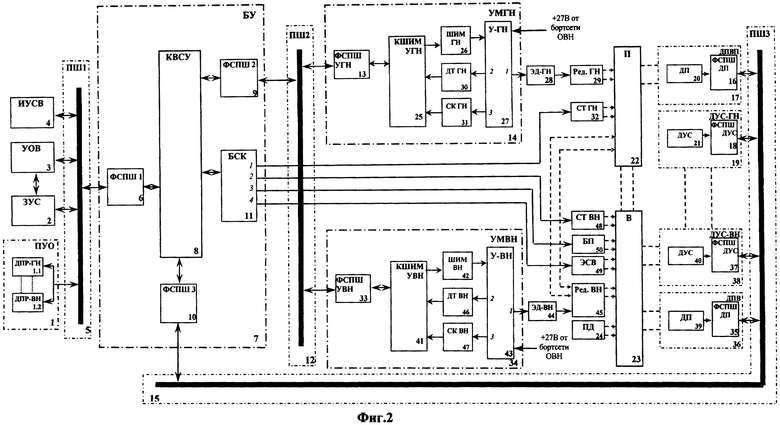
Система дистанционного управления вооружением, содержащая вращающуюся платформу с механическим погоном, редуктор ВН, установленное вооружение (пулемет), механически соединенное с вращающейся платформой, редуктором ВН и прицелом диоптрическим, отличающаяся тем, что в нее дополнительно введены пульт управления оператора, включающий датчик положения рукоятки по ГН, датчик положения рукоятки по ВН; задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН, устройство отображения видеоинформации, информационно-управляющая система вооружения, блок управления, включающий первый формирователь сигналов последовательной шины, второй формирователь сигналов последовательной шины, третий формирователь сигналов последовательной шины, контроллер вычисления сигналов управления, блок силовых ключей; усилитель мощности ГН, включающий формирователь сигналов последовательной шины усилителя ГН, контроллер широтно-импульсного модулятора усилителя ГН, широтно-импульсный модулятор ГН, усилитель ГН, датчик тока усилителя ГН, датчик скорости вала электродвигателя ГН; усилитель мощности ВН, включающий формирователь сигналов последовательной шины усилителя ВН, контроллер широтно-импульсного модулятора усилителя ВН, широтно-импульсный модулятор ВН, усилитель ВН, датчик тока усилителя ВН, датчик скорости вала электродвигателя ВН; электродвигатель ГН, электродвигатель ВН, редуктор ГН, датчик положения вращающейся платформы, включающий датчик положения, формирователь сигналов последовательной шины; датчик положения вооружения, включающий датчик положения, формирователь сигналов последовательной шины; датчик абсолютной угловой скорости по ГН, включающий датчик абсолютной угловой скорости, формирователь сигналов последовательной шины; датчик абсолютной угловой скорости по ВН, включающий датчик абсолютной угловой скорости, формирователь сигналов последовательной шины; электромеханический стопор ГН, электромеханический стопор ВН, блок пиропатронный, электроспуск установленного вооружения, первая последовательная шина, вторая последовательная шина, третья последовательная шина, причем задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН электрически связано с устройством отображения видеоинформации, а пульт управления оператора, содержащий датчики положения рукояток по ГН и ВН, задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН, устройство отображения видеоинформации и информационно-управляющая система вооружения электрически связаны с первой последовательной шиной, которая в свою очередь электрически связана с первым формирователем сигналов последовательной шины блока управления, при этом первый формирователь сигналов последовательной шины электрически связан с контроллером вычисления сигналов управления блока управления, который в свою очередь связан со вторым и третьим формирователями сигналов последовательной шины блока управления и блоком силовых ключей блока управления, причем второй формирователь сигналов последовательной шины блока управления через вторую последовательную шину электрически связан с формирователями сигналов последовательной шины усилителя ГН и усилителя ВН, соответственно усилителя мощности ГН и усилителя мощности ВН, а третий формирователь сигналов последовательной шины блока управления через третью последовательную шину электрически связан с формирователями сигналов последовательной шины датчиков положения датчика положения вращающейся платформы и датчика положения вооружения, а также с формирователями сигналов последовательной шины датчиков абсолютной угловой скорости датчиков абсолютной угловой скорости ГН и ВН, при этом датчик положения вращающейся платформы кинематически связан с погоном вращающейся платформы, датчик положения установленного вооружения кинематически связан с осью вращения установленного вооружения, а датчики абсолютной угловой скорости ГН и ВН механически связаны с установленным вооружением, при этом формирователи сигналов последовательной шины датчиков положения датчика положения вращающейся платформы и датчика положения вооружения электрически связаны с датчиками положения соответственно датчика положения вращающейся платформы и датчика положения вооружения, а формирователи сигналов последовательной шины датчиков абсолютной угловой скорости датчиков абсолютной угловой скорости ГН и ВН электрически связаны с датчиками абсолютной угловой скорости соответственно датчиков абсолютной угловой скорости ГН и ВН, при этом с одной стороны формирователь сигналов последовательной шины усилителя ГН усилителя мощности ГН электрически связан с контроллером широтно-импульсного модулятора усилителя ГН, связанного с широтно-импульсным модулятором ГН, который в свою очередь связан с входом усилителя ГН усилителя мощности ГН, первый выход которого электрически связан с электродвигателем ГН, а второй и третий выходы соответственно электрически связаны с датчиком тока усилителя ГН и датчиком скорости вала электродвигателя ГН, выходы которых соответственно электрически соединены со входами контроллера широтно-импульсного модулятора усилителя ГН, причем усилитель ГН усилителя мощности ГН электрически соединен с бортовой сетью ОВН и вращает вал электродвигателя ГН, который через редуктор ГН, механически связанный с погоном вращающейся платформы, поворачивает вращающуюся платформу, а с ней и установленное вооружение в заданном направлении при наличии разрешающего сигнала от блока силовых ключей, первый выход которого электрически связан с электромеханическим стопором ГН, обеспечивающим через собственную кинематическую связь с вращающейся платформой ее дистанционное механическое расстопоривание, с другой стороны формирователь сигналов последовательной шины усилителя ВН усилителя мощности ВН электрически связан с контроллером широтно-импульсного модулятора усилителя ВН, связанного с широтно-импульсным модулятором ВН, который в свою очередь связан с входом усилителя ВН усилителя мощности ВН, первый выход которого электрически связан с электродвигателем ВН, а второй и третий выходы соответственно электрически связаны с датчиком тока усилителя ВН и датчиком скорости вала электродвигателя ВН, выходы которых соответственно электрически соединены со входами контроллера широтно-импульсного модулятора усилителя ВН, причем усилитель ВН усилителя мощности ВН электрически соединен с бортовой сетью ОВН и вращает вал электродвигателя ВН, который через редуктор ВН, механически связанный с установленным вооружением и вращающейся платформой, поворачивает установленное вооружение в заданном направлении при наличии разрешающего сигнала от блока силовых ключей, второй выход которого электрически связан с электромеханическим стопором ВН, обеспечивающим через собственную кинематическую связь с установленным вооружением его дистанционное механическое расстопоривание, при этом третий и четвертый выходы блока силовых ключей блока управления электрически связаны соответственно с блоком пиропатронным и электроспуском вооружения, механически связанными с установленным вооружением.
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2010 |
|
RU2430326C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| US 5949015 A, 07.09.1999 | |||
| Конвейер для заготовочных цехов обувных фабрик | 1960 |
|
SU134624A1 |

