Изобретение относится к области морских геофизических исследований и может быть использовано при измерении и регистрации гидрологических параметров водной среды (гидростатического давления, температуры, солености и т. д.) с помощью автономных погружаемых зондов.
Известен способ передачи и регистрации гидрологических параметров на акваториях [1] заключающийся в том, что на поверхности водного бассейна размещают пункт сбора и регистрации (ПСР) гидрологической информации, спускают в воду автономный зонд (АЗ); на погружающемся автономном зонде периодически измеряют гидрологические параметры (гидростатическое давление, температуру, соленость и т. д. ), формируют в соответствии с данными измерений электрический сигнал, который преобразуют в соответствующий акустический сигнал, излучают последний в сторону ПСР; на ПСР приходящий акустический сигнал преобразуют в электрическую форму, обрабатывают соответствующим образом и регистрируют в соответствующих средствах регистрации.
Наиболее близким техническим решением к заявляемому устройству является устройство передачи и регистрации гидрологических параметров на акваториях [1] состоящее из размещаемого на поверхности водного бассейна пункта сбора и регистрации гидрологической информации, оснащенной приемной гидроакустической антенной, соответствующими средствами обработки и регистрации принимаемых сигналов, а также из автономного погружаемого зонда, содержащего в герметичном корпусе автономный источник питания для питания всех составных частей АЗ, последовательно соединенные таймер, измеритель гидрологических параметров, изменяющий в числе прочих параметров гидростатическое давление, формирователь сигналов, блок усиления, передающую гидроакустическую антенну, причем питающие входы таймера, измерителя гидрологических параметров, формирователя сигналов, блока усиления объединены между собой и подключены к автономному источнику питания, а вход управления формирователя сигналов соединен с выходом таймера.
Недостатком прототипа-способа и прототипа-устройства является недостаточная эффективность использования энергии автономного источника питания автономного погружаемого зонда и связанная с этим недостаточная продолжительность времени автономной работы зонда; это объясняется тем, что потребление энергии от автономного источника питания АЗ определяется в основном мощностью передачи акустических сигналов из зонда [1] При этом мощность передачи устанавливают исходя из обеспечения требуемой помехоустойчивости приема сигналов на ПСР при достижении автономным зондом максимальной рабочей глубины в месте проведения наблюдений. Поэтому при погружении зонда на всех глубинах, за исключением максимальной, мощность передачи сигналов из АЗ превышает необходимую.
Используя известное уравнение дальности [2] несложно показать, что у автономного зонда, предназначенного для работы на максимальных глубинах в несколько тысяч метров, в начальный промежуток времени, когда АЗ последовательно проходит поверхностные и средние горизонты, мощность передачи в сотни и десятки раз превышает требуемую.
Изобретение имеет целью повышение эффективности использования энергии автономного источника питания автономного зонда.
Поставленная цель достигается тем, что в заявленном способе передачи и регистрации гидрологических параметров на акваториях, заключающемся в размещении на поверхности сбора и регистрации (ПСР) гидрологической информации, в погружении в воду автономного зонда (АЗ), в периодическом измерении на погружающемся АЗ гидрологический параметров (гидростатического давления, температуры, солености и т.д.), формировании в соответствии с данными измерений электрического сигнала, его усилении, преобразовании в соответствующий акустический сигнал, излучении последнего в сторону ПСР; в преобразовании поступающего на пункт сбора и регистрации акустического сигнала в электрическую форму, соответствующей его обработке и регистрации в соответствующих средствах регистрации; предварительно, исходя из требуемой помехоустойчивости приема сигналов на ПСР, определяют зависимость мощности передачи сигналов из АЗ от глубины его погружения, после спуска зонда в воду, по мере его погружения, регулируют мощность передачи сигналов в соответствии с ранее определенной ее зависимостью от глубины погружения зонда, для определения которой используют данные измерений гидростатического давления в месте нахождения зонда, мощность передачи изменяет каждый раз, когда фиксируют изменение гидростатического давления, повышающее некоторую предварительно заданную величину. При этом в устройстве, состоящем из размещаемого на поверхности водного бассейна пункта сбора и регистрации гидрологической информации оснащенного приемной гидроакустической антенной, соответствующими средствами обработки и регистрации принимаемых сигналов, а также из автономного погружаемого зонда, содержащего в герметичном корпусе автономный источник питания для питания всех составных частей А3, таймер, измеритель гидрологических параметров, измеряющий в числе прочих параметров гидростатическое давление, формирователь сигналов, блок усиления, передающую гидроакустическую антенну, дополнительно введены блок памяти, блок вычитания, блок вычисления абсолютного значения, блок задания шага регулирования, блок сравнения, функциональный преобразователь, блок регулирования мощности передачи. Причем выход измерителя подключен к параллельно соединенным информационному входу формирователя сигналов, информационному входу блока памяти и первому входу блока вычитания, выход таймера подключен к параллельно соединенным управляющему входу измерителя гидрологических параметров, управляющему входу формирователя сигналов, первому управляющему входу блока памяти, выход которого подключен к входу функционального преобразователя и второму входу блока вычитания, выход формирователя сигналов подключен к последовательно соединенным блоку регулирования мощности передачи, блоку усиления, передающей гидроакустической антенне; выход функционального преобразователя соединен с управляющим входом блока регулирования мощности передачи, выход блока вычитания подключен к последовательно соединенным блоку вычисления абсолютного значения, блоку сравнения, второму управляющему входу блока памяти, второй вход блока сравнения соединен с выходом блока задания шага регулирования.
Таким образом, изобретение имеет следующие отличительные признаки.
1. Предварительно, исходя из требуемой помехоустойчивости приема сигналов на пункте сбора и регистрации гидрологической информации, определяют зависимость мощности сигналов из автономного зонда от глубины его погружения. Этот признак позволяет обеспечить регулировку мощности передачи сигналов из АЗ, что повышает эффективность использования энергии автономного источника питания зонда.
2. В процессе погружения АЗ регулируют мощность передачи сигналов в зависимости от глубины погружения зонда; для определения глубины используют данные измерения величины гидроакустического давления в месте нахождения зонда. Этот признак позволяет повысить эффективность использования энергии автономного источника питания автономного зонда.
3. Мощность передачи сигналов изменяют только в том случае, если изменение гидростатического давления превышает некоторую заранее заданную величину. Этот признак позволяет повысить эффективность использования энергии автономного источника питания автономного зонда и защищает от изменений мощности передачи сигналов при вариациях величины гидростатического давления, для наблюдения за которыми используется заявляемый способ.
4. В состав погружаемого автономного зонда введены блок памяти, блок вычитания, блок вычисления абсолютного значения, блок задания шага регулирования, блок сравнения, функциональный преобразователь, блок регулирования мощности передачи, что в указанной выше совокупности и взаимосвязи позволяет осуществлять регулировку мощности передачи сигналов из АЗ и повышает эффективность использования энергии автономного источника питания зонда.
На основании анализа видно, что заявляемое техническое решение обладает существенными отличиями.
На чертеже показана схема погружаемого автономного зонда, содержащего в герметичном корпусе (на чертеже не показан) автономный источник питания 1, таймер 2, измеритель гидрологических параметров 3, измеряющий в числе прочих гидростатическое давление, формирователь сигналов 4, блок усиления 5, передающую гидроакустическую антенну 6, блок памяти 7, блок вычитания 8, блок вычисления абсолютного значения 9, блок задания шага регулирования 10, блок сравнения 11, функциональный преобразователь 12, блок регулирования мощности передачи 13. Причем выход таймера 2 подключен к параллельно соединенным управляющим входам измерителя гидрологических параметров 3, формирователя сигналов 4 и блока памяти 7; выход измерителя гидрологических параметров 3 подключен к соединенным вместе информационному входу формирователя сигналов 4, информационному входу блока памяти 7 и первому входу блоку вычитания 8, второй вход блока вычитания 8 вместе с входом функционального преобразователя 12 подключен к выходу блока памяти 7, выход формирователя сигналов с сигнальным входом блока регулирования мощности передачи 13, управляющий вход которого подключен к выходу функционального преобразователя 12, выход блока регулирования мощности передачи 13 подключен к последовательно соединенным блоку усиления 5 и передающей гидроакустической антенне 6; выход блока вычитания 8 подключен к последовательно соединенным блоку вычисления абсолютного значения 9, блоку сравнения 11, второму управляющему входу блока памяти 7, второй вход блока сравнения 11 соединен с выходом блока задания шага регулирования 10. Питающие входы таймера 2 измерителя гидрологических параметров 3, формирователя сигналов 4, блока усиления 5, блока памяти 7, блока вычитания 8, блока вычисления абсолютного значения 9, блока задания шага регулирования 10, блока сравнения 11, функционального преобразователя 12 и блока регулирования мощности передачи 13 подключены к автономному источнику питания 1.
Работа заявляемого способа заключается в последовательной реализации заявляемым устройством следующих операций:
1. Предварительно, исходя из требуемой помехоустойчивости приема сигналов на ПСР, определяют зависимость мощности передачи сигналов из АЗ от глубины погружения зонда [2] используя известную связь между глубиной погружения и средним значением величины гидростатического давления (при изменении глубины на 10 м гидростатическое давление меняется в среднем на 1 атм [2]), определяют зависимость мощности передачи сигналов из зонда от величины гидростатического давления при последовательном прохождении автономным зондом различных горизонтов исследуемого водного бассейна.
Зависимость мощности передачи от величины гидростатического давления закладывают в функциональный преобразователь 12.
2. Задают пределы гидростатического давления, в которых мощность передачи сигналов из автономного зонда неизменная (шаг регулирования).
Информацию о величине шага регулирования закладывают в блок задания шага регулирования 10.
3. Пункт сбора и регистрации гидрологической информации размещают на поверхности, автономный погружаемый зонд спускают в воду.
4. На погружающемся автономном зонде периодически измеряют гидрологические параметры (гидростатическое давление, температуру, соленость и т.п.), формируют в соответствии с данными измерений электрический сигнал до величины, определенной в п.1, преобразуя этот сигнал в соответствующий акустический сигнал, излучают последний в направлении ПСР.
Данные операции осуществляются по сигналу от таймера 2, который периодически включает измеритель гидрологических параметров, измеряющий соответствующие гидрологические параметры (гидростатическое давление, температуру, соленость и т.п.) в месте нахождения зонда. В соответствии с данными измерений в формирователе сигналов 4 формируется соответствующий сигнал, который, последовательно поступая на блок регулирования мощности передачи 13, блок усиления 5, передающую гидроакустическую антенну 6, усиливается до величины, определенной в п. 1, преобразуется в соответствующий акустический сигнал и излучается в направлении ПСР. Мощность передачи сигналов из АЗ, определенная в п. 1, задается сигналом, поступающим на управляющий вход блока регулирования мощности 13 с выхода функционального преобразователя 12.
5. Одновременно с выполнением операций по п. 4 анализируют данные измерения гидростатического давления, при изменении величины давления, превышающем шаг регулирования, заданный в п. 2, измеряют мощность передачи сигналов из автономного зонда.
Для выполнения указанных операций данные измерения величины гидростатического давления, полученные в измерителе гидрологических параметров 3, подаются на соединенные вместе информационный вход блока памяти 7 и первый вход блока вычитания 8. На второй вход блока вычитания сигнал с выхода памяти 7, который представляет собой величину гидростатического давления, использованную для задания мощности в предыдущем в предыдущем цикле передачи сигналов. Результат вычитания подается в блок вычисления абсолютного значения 9, где осуществляется вычисление его абсолютного значения, которое поступает на первый вход блока сравнения 11. На второй вход блока сравнения 11 подается сигнал от блока задания шага регулирования 10. Если абсолютное значение результата вычитания превосходит значение шага регулирования, то по сигналу от блока сравнения 11 в блок памяти 7 заносится новое значение величины гидростатического давления, которое используется для формирования в функциональном преобразователе 12 сигнала, задающего мощность передачи из АЗ. Если абсолютное значение результата вычитания меньше значения шага регулирования, то запись нового значения гидростатического давления не производится. Мощность передачи сигналов из АЗ остается неизменной.
6. На пункте сбора и регистрации гидрологической информации приходящий из АЗ акустический сигнал преобразуют в электрическую форму, обрабатывают соответствующим образом и регистрируют в соответствующих средствах регистрации. Выполнение операций традиционно и осуществляется теми же узлами, что и в устройстве-прототипе.
Блоки, входящие в состав заявляемого устройства, известны в технике. Для его реализации могут быть использованы как соответствующие блоки из устройства-прототипа, так и блоки, описанные в литературе.
В качестве блока памяти 7 может использоваться параллельный регистр, примеры реализации параллельных регистров приведены в [3]
Блок вычитания и блок вычисления абсолютного значения 9 могут быть выполнены на основе арифметико-логических устройств (АЛУ). Примеры указанных устройств на основе АЛУ приведены в [3] Блок сравнения 11 может быть выполнен в виде многоразрядного цифрового компаратора. Примеры реализации многоразрядных компараторов приведены в [3]
Блок задания шага регулирования 10 и функциональный преобразователь 12 могут быть выполнены на основе постоянных запоминающих устройств (ПЗУ). Примеры реализации ПЗУ и построения на их основе функциональных преобразователей приведены в [3]
Для реализации блока регулирования мощности передачи 13 может быть использован управляемый делитель напряжения 13 может быть использован управляемый делитель напряжения на основе перемножающего цифроаналогового преобразователя. Примеры перемножающих цифроаналоговых преобразователей и реализации на их основе управляемых делителей напряжения приведены в [3]
Возможны и другие выполнения указанных блоков. Если обработка сигналов в АЗ осуществляется в аналоговой форме, то примеры выполнения блока памяти 7, блока вычитания 8 блока вычисления абсолютного значения 9, блока задания шага регулирования 10, блока сравнения 11, функционального преобразователя 12 и блока регулирования мощности передачи 13 на основе аналоговых элементов можно найти в [3]
Использование: в морских геофизических исследованиях, при измерении и регистрации гидрологических параметров водной среды: гидроакустического давления, температуры, солености и т.д. - с помощью автономных погружаемых зондов. Сущность изобретения: устройство состоит из размещаемого на поверхности водного бассейна пункта сбора и регистрации (ПСР) гидрологической информации, оснащенного приемной гидроакустической антенной, соответствующими средствами обработки и регистрации принимаемых сигналов, а также из погружаемого автономного зонда (АЗ), содержащего в герметичном корпусе автономный источник питания для питания всех составных частей АЗ, таймер, измеритель гидрологических параметров, измеряющий в числе прочих параметров гидростатическое давление, формирователь сигналов и последовательно соединенные блок усиления и передающую гидроакустическую антенную выход таймера подключен к управляющим входам измерителя гидрологических параметров и блока формирования сигнала, информационный вход которого подключен к выходу измерителя гидрологических параметров. В состав АЗ введены блок памяти, блок вычитания, блок вычисления абсолютного значения, блок задания шага регулирования, блок сравнения, функциональный преобразователь, блок регулирования мощности передачи. Размещают на поверхности водного бассейна пункт сбора и регистрации гидрологической информации, определяют, исходя из требуемой помехоустойчивости сигнала, зависимость мощности передачи сигнала и автономного зонда от глубины его погружения, регулируют мощность передачи сигнала из автономного зонда в соответствии с глубиной его погружения, мощность передачи изменяют каждый раз, когда фиксируют изменение гидростатического давления, превышающее предварительно заданную величину. 2 с.п. ф-лы, 1 ил.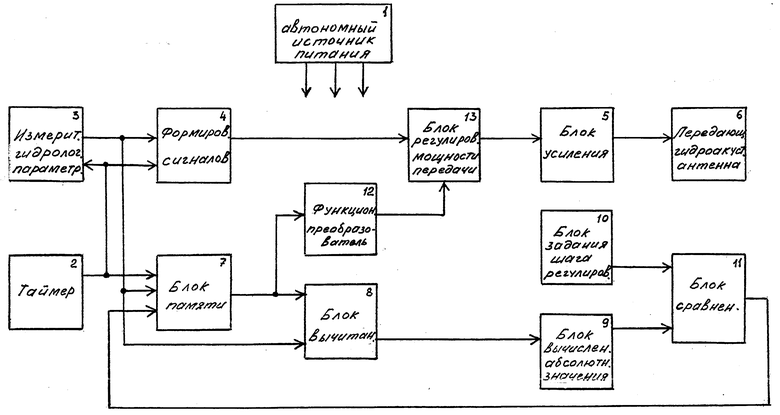
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Балакин Р.А | |||
| Автономный измеритель гидрологических параметров | |||
| Сб.докл | |||
| на Всесоюзн | |||
| семинаре Проблемы автоматизации гидрометеорологических наблюдений | |||
| - Л.: Гидрометеоиздат, 1977, с | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Чверткин Е.И | |||
| Гидроакустическая телеметрия в океанологии | |||
| - Л.: Изд-во ЛГУ, 1978, с.148 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Титце У., Шенк К | |||
| Полупроводниковая схемотехника | |||
| Справочное руководство / Пер.с нем | |||
| - М.: Мир, 1982, с | |||
| СПОСОБ ПОЛУЧЕНИЯ ТВЕРДЫХ ПРОДУКТОВ УПЛОТНЕНИЯ ФОРМАЛЬДЕГИДА С ФЕНОЛАМИ И ДРУГИМИ ВЕЩЕСТВАМИ | 1925 |
|
SU512A1 |
