Предлагаемое изобретение относится к области телеуправления и может быть использовано при построении аппаратуры телеуправления с полудуплексным режимом работы, в которой канал связи или отдельные узлы аппаратуры используются поочередно и на прием, и на передачу.
Известен способ передачи команд управления [1] по которому с первого объекта на второй передают сигнал A, состоящий из последовательно повторяющихся K раз кодовых комбинаций, соответствующих передаваемой команде, на втором объекте осуществляют прием и декодирование сигнала А, при обнаружении первой из указанных кодовых комбинаций, в которой при декодировании не обнаруживают ошибок, считают команду принятой, исполняют ее, одновременно передают на первый объект сигнал Б, подтверждающий прием на втором объекте команды управления, на первом объекте принимают и декодируют приходящий сигнал Б, если при декодировании сигнала Б не обнаруживают ошибок, то считают, что команда управления получена на втором объекте.
Наиболее близким к заявляемому устройству (прототипом) является устройство передачи команд управления [1] состоящее из первого и второго объектов; первый объект содержит первый кодер, передатчик сигнала А, первый коммутатор, приемник сигнала Б, второй декодер, причем вход первого кодера служит входом устройства, выход первого кодера соединен с входом передатчика сигнала А, выход которого соединен с первым выводом первого коммутатора, второй вывод первого коммутатора подключен к выходу приемника сигнала Б, выход которого соединен с входом второго декодера, выход второго декодера служит вторым выходом устройства, третий выход первого коммутатора подключен к каналу связи; второй объект содержит второй коммутатор, приемник сигнала А, первый декодер, второй кодер, передатчик сигнала Б, причем первый вывод второго коммутатора подключен к входу приемника сигнала А, выход которого соединен с входом первого декодера, первый выход последнего служит первым выходом устройства, второй выход первого декодера соединен с входом второго кодера, выход второго кодера подключен к входу передатчика сигнала Б, выход которого соединен с вторым выводом второго коммутатора, третий вывод второго коммутатора подключен к каналу связи.
Известное устройство передачи команд управления [1] работает следующим образом.
При необходимости передачи на второй объект команды управления на первом объекте из вне на вход первого кодера подается сигнал; в первом кодере формируется K соответствующих одинаковых кодовых комбинаций, которые подаются в передатчик сигнала А, в нем осуществляется формирование соответствующего сигнала А, который через первый коммутатор подается в канал связи; сигнал А, распространяясь по каналу связи, поступает на второй объект, на втором коммутатор, а через него на вход приемника сигнала А, в котором он фильтруется, детектируется, после чего подается на вход первого декодера, в первом декодере осуществляется декодирование кодовых комбинаций сигнала А; при поступлении кодовой комбинации, в которой первым декодером не обнаруживается ошибок с первого выхода первого декодера, являющегося первым выходом устройства, выдается на исполнение соответствующий сигнал, одновременно по сигналу с второго выхода первого декодера во втором кодере и передатчике сигнала Б начинается формирование сигнала подтверждения Б, который через второй коммутатор подается в канал связи; сигнал Б, распространяясь по каналу связи, поступает на первый объект, на первый коммутатор, а через него на вход приемника сигнала Б, в котором он фильтруется, детектируется, после чего подается на вход второго декодера, во втором декодере осуществляется декодирование сигнала Б; если вторым декодером не обнаруживается ошибок, то с его выхода, являющегося вторым выходом устройства, выдается соответствующий сигнал, подтверждающий прием на втором объекте команды управления.
Недостатком прототипа-способа и прототипа-устройства являются ограниченные функциональные возможности, связанные с тем, что для и реализации необходима возможность одновременной передачи сигналов с первого объекта на второй и с второго объекта на первый. Если такая возможность отсутствует, например отдельные узлы устройства используются поочередно для приема и передачи сигналов, то передача команд управления возможна только при продолжительности времени распространения сигнала в канале связи T, подчиняющейся условию:
T ≥ (К 1) Ta/2
где
Ta длительность кодовой комбинации сигнала А;
К количество кодовых комбинаций, составляющих сигнал А.
Действительно, если время распространения сигнала в канале связи меньше величины, определенной в (1), то при передаче с первого объекта команды управления на втором объекте может быть принята первая из кодовых комбинаций, составляющих сигнал А, тогда на втором объекте начинается формирование и передача сигнала подтверждения Б, который, распространяясь по каналу связи, достигает первого объекта раньше, чем закончится на первом объекте передача сигнала А. В результате сигнал Б будет пропущен, что приведет к потере информации о приеме на втором объекте команды управления.
Техническим результатом изобретения является обеспечение обмена сигналами между первым и вторым объектами в широком диапазоне изменения времени распространения сигналов между ними.
Это достигается тем, что по способу передачи команд управления между объектами, разнесенными в пространстве, заключающемуся в передаче с первого объекта на второй сигнал А, состоящего из последовательности К кодовых комбинаций, соответствующих передаваемой команде, в приеме и декодировании на втором объекте сигнала А, в исполнении команды управления при получении первой из указанных кодовых комбинаций, в котором при декодировании не обнаруживают ошибок, в передаче на первый объект сигнала Б, подтверждающего прием на втором объекте команды управления, в приеме и декодировании на первом объекте приходящего сигнала Б, использовании декодированного сигнала в качестве сигнала подтверждения приема на втором объекте команды управления, предварительно задают фиксированный промежуток времени T0, равный или больший длительности сигнала А, запоминают на втором объекте сигнал, соответствующий величине длительности промежутка T0, нумеруют кодовые комбинации, составляющие сигнал А, номера передают в составе соответствующих кодовых комбинациях сигнала А, на втором объекте формируют и передают сигнал подтверждения Б с задержкой на время Tз после получения первой из указанных кодовых комбинаций сигнала А, в которой при декодировании не обнаруживают ошибок, определяют номер k этой кодовой комбинации, устанавливают длительность задержки Tз, равную разности продолжительности упомянутого фиксированного промежутка времени T0 и длительности k кодовых комбинаций сигнала А.
При этом в устройстве передачи команд управления, состоящем из первого и второго объектов, содержащем на первом объекте первый кодер, передатчик сигнала А, первый коммутатор, приемник сигнала Б, второй декодер, причем вход первого кодера служит входом устройства, выход первого кодера соединен с входом передатчика сигнала А, выход которого соединен с первым выводом первого коммутатора, второй вывод первого коммутатора подключен к входу приемника сигнала Б, выход которого соединен с входом второго декодера, выход второго декодера служит вторым выходом устройства, третий выход первого коммутатора подключен к каналу связи, содержащем на втором объекте второй коммутатор, приемник сигнала А, первый декодер, второй кодер, передатчик сигнала Б, причем первый вывод второго коммутатора подключен к входу приемника сигнала А, выход которого соединен с входом первого декодера, первый выход последнего служит первым выходом устройства, выход второго кодера подключен к входу передатчика сигнала Б, третий вывод соединен с вторым выводом второго коммутатора, третий вывод второго коммутатора подключен к каналу связи, в состав второго объекта введен блок задержки, состоящий из последовательно включенных вычислителя и управляемой линии задержки, выход управляемой линии задержки служит выходом блока задержки и соединен с входом второго кодера, вход вычислителя, являющийся входом блока задержки, подключен к второму выходу первого декодера.
Изобретение поясняется примером конкретного выполнения устройства передачи команд управления, представленным на чертеже, состоящего из первого 1 и второго 2 объектов, содержащего на первом объекте 1 первый кодер 3, передатчик сигнала А 4, первый коммутатор 5, приемник сигнала Б 6, второй декодер 7, причем вход первого кодера 3 служит входом 8 устройства, выход первого кодера 3 соединен с входом передатчика сигнала А 4, выход которого соединен с первым выводом первого коммутатор 5, второй выход первого коммутатор 5 подключен к входу приемника сигнала Б 6, выход которого соединен с входом второго декодера 7, выход второго декодера 7 служит вторым выходом 9 устройства, третий вывод первого коммутатор 5 подключен к каналу связи, содержащего на втором объекте 2 второй коммутатор 10, приемник сигнала А 11, первый декодер 12, второй декодер 13, передатчик сигнала Б 14, блок задержки 16, состоящий из последовательно включенных вычислителя 17 и управляемой линии задержки 18, причем первый вывод второго коммутатора 10 подключен к входу приемника сигнала А 11, выход которого соединен с входом первого декодера 12, первый выход последнего служит первым выходом 15 устройства, второй выход первого декодера 12 соединен с входом блока задержки 16, которым является вход вычислителя 17, выход управляемой линии задержки 18 служит выходом блока задержки 16 и соединяется с входом второго кодера 13, выход второго кодера 13 подключен к входу передатчика сигнала Б 14, выход которого соединен с вторым выводом второго коммутатора 10, третий вывод второго коммутатора 10 подключен к каналу связи.
Работа устройства осуществляется следующим образом.
При необходимости передачи на второй объект команды управления на первом объекте 1 из вне на вход первого кодера 3 подается сигнал; в первом кодере 3 формируется K соответствующих пронумерованных кодовых комбинаций, каждая из указанных кодовых комбинаций содержит в своем составе присвоенный ей номер, кодовые комбинации подаются в передатчик сигнала А 4, в нем осуществляется формирование соответствующего сигнала А, который через первый коммутатор 5 подается в канал связи; сигнал А, распространяясь по каналу связи, поступает на второй объект 2, на второй коммутатор 10, а через него на вход приемника сигнала А 11, в котором он фильтруется, детектируется, после чего подается на вход первого декодера 12, в первом декодере 12 осуществляется декодирование кодовых комбинаций сигнала А; при поступлении кодовой комбинации, в которой первым декодером 12 не обнаруживается ошибок с первого выхода первого декодера 12, являющегося первым выходом 15 устройства, выдается на исполнение соответствующий сигнал, одновременно с второго выхода первого декодера 12 номер k декодированной без ошибок кодовой комбинации сигнала А подается на вход блока задержки 16; в блоке задержки 16 номер k поступает на вход вычислителя 17, в вычислителе 17 осуществляется вычисление вышеуказанного условия [2] полученное в вычислителе 17 значение времени задержки Tз подается на вход управляемой линии задержки 18, спустя указанное время Tз на выходе управляемой линии задержки 18 формируется сигнал, по которому во втором кодере 13 и передатчике сигнала Б 14 начинается формирование сигнала подтверждения Б, который через второй коммутатор 10 подается в канал связи; сигнал Б, распространясь по каналу связи, поступает на первый объект 1, на первый коммутатор 5, а через него на вход приемника сигнала Б 6, в котором он фильтруется, детектируется, после чего подается на вход второго декодера 7, во втором декодере 7 осуществляется декодирование сигнала Б; если вторым декодером 7 не обнаруживается ошибок, то с выхода второго декодера, являющегося вторым выходом 9 устройства, выдается соответствующий сигнал подтверждения приема на втором объекте команды управления.
Работа способа заключается в последовательной реализации заявляемым устройством вышеуказанных операций.
Подобное выполнение заявляемых способа и устройства позволяет обеспечивать обмен сигналами между первым и вторым объектами в широком диапазоне изменения времени распространения сигналов между ними. При этом затраты времени на прохождение сигналов между первым и вторым объектами и обратно будут наименьшими.
Список использованных источников.
1. Криволапов Г.И. Макаров А.А. Постников Н.И. Чернецкий Г.А. Некоторые результаты испытаний АГАС для управления и диагностики ДСС. В кн. Методика и техника сейсмоакустических и вибросейсмических исследований на акваториях. (Сборник статей) /Под ред. В. И.Добринского. Новосибирск, ВЦ СО АН СССР, 1988, с. 17-25.
2. Титце У. Шенк К. Полупроводниковая схемотехника. Справочное руководство. /Пер. с нем. М. Мир, 1982, с. 512.
Изобретение относится к области телеуправления и может использоваться при построении аппаратуры телеуправления с полудуплексным режимом работы, в которой канал связи или отдельные узлы аппаратуры используются поочередно и на прием, и на передачу. Устройство передачи команд управления состоит из первого 1 и второго 2 объектов и содержит на первом объекте 1 первый кодер 3, передатчик сигнала А 4, первый коммутатор 5, приемник сигнала Б 6, второй декодер 7, причем вход первого кодера 3 служит входом 8 устройства, выход первого кодера 3 соединен с входом передатчика сигнала А 4, выход которого соединен с первым выводом первого коммутатора 5, второй вывод первого коммутатора 5 подключен к воду приемника сигнала Б 6, выход которого соединен с входом второго декодера 7, выход второго декодера 7 служит вторым выходом 9 устройства, третий вывод первого коммутатора 5 подключен к каналу связи, а на втором объекте 2 второй коммутатор 10, приемник сигнала А 11, первый декодер 12, второй кодер 13, передатчик сигнала Б 14, блок задержки 16, состоящий из последовательно включенных вычислителя 17 и управляемой линии задержки 18, причем первый вывод второго коммутатора 10 подключен к входу приемника сигнала А 11, выход которого соединен с входом первого декодера 12, первый выход последнего служит первым выходом 15 устройства, второй выход первого декодера 12 соединен с входом блока задержки 16, которым является вход вычислителя 17, выход управляемой линии задержки 18 служит выходом блока задержки 16 и соединяется с входом второго кодера 13, выход второго кодера 13 подключен к входу передатчика сигнала Б 14, выход которого соединен с вторым выводом второго коммутатора 10, третий вывод второго коммутатора 10 подключен к каналу связи. 2 с.п. ф-лы, 1 ил.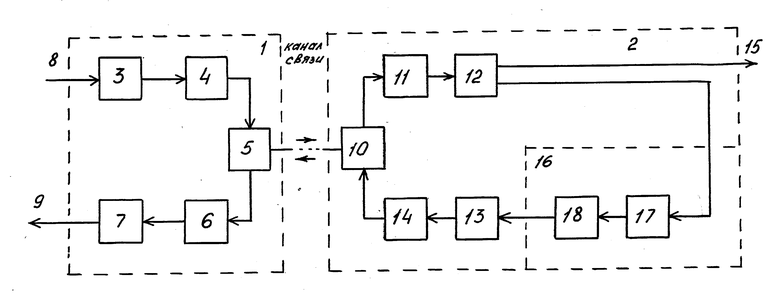
| US, патент, 4214123, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| SU, авторское свидетельство, 1806443, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Криволапов Г.И., Макаров А.А., Постников Н.И., Чернецкий Г.А | |||
| Некоторые результаты испытаний АГАС для управления и диагностики ДСС | |||
| В сб | |||
| ст | |||
| Методика и техника сейсмоакустических и вибросейсмических исследований на акваториях | |||
| -Новосибирск: ВЦ СО АН СССР, 1988, с | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
