Изобретение относится к автоматизированному электроприводу, и может быть использовано для автоматического регулирования тока электропривода, параметры которого изменяются в процессе работы, например, вследствие изменения магнитного потока возбуждения и скорости вращения электродвигателя.
Известен электропривод с пропорционально-интегральным регулятором тока жесткой структуры /1/, содержащий регулятор скорости, подсоединенный одним входом к задатчику, другим входом к датчику скорости вращения двигателя, выходом к одному из входов регулятора тока, который подключен другим из входов к выходу датчика тока якоря, а выходом к управляющему входу преобразователя, к выходу которого подсоединена обмотка возбуждения двигателя.
Контур регулирования скорости этого электропривода определяет, в основном, точность регулирования в установившихся режимах, а контур регулирования тока качество регулирования в переходных режимах. При этом настройка пропорционально-интегрального регулятора тока осуществляется таким образом, чтобы коэффициент усиления и наименьший по модулю полюс передаточной функции объекта управления контура тока компенсировались за счет соответствующего коэффициента и нуля передаточной функции регулятора тока.
Однако в процессе работы электропривода коэффициент усиления объекта управления контура регулирования тока и постоянная времени цепи возбуждения двигателя, которой определяется наименьший по модулю полюс передаточной функции объекта управления контура тока, изменяются вследствие изменения магнитного потока и скорости вращения двигателя. Параметры же пропорционально-интегрального регулятора тока остаются постоянными. Следовательно, условия выполнения указанной выше компенсации будут нарушены. Именно поэтому рассматриваемый электропривод имеет недостаточно малую чувствительность к изменению своих параметров и, соответственно, недостаточно высокое качество регулирования.
Наиболее близким к предлагаемому по своей технической сущности является электропривод с интегральными регуляторами тока жесткой структуры /2/, содержащий первый регулятор тока, подсоединенный одним входом к выходу датчика тока якоря, другим входом через инерционный фильтр к задатчику тока, выходом к первому входу второго регулятора тока, который подключен вторым входом к выходу датчика тока якоря, третьим входом к задатчику тока, выходом к первому входу интегросуммирующего усилителя, который подсоединен вторым входом к выходу датчика тока якоря, третьим входом к выходу суммирующего усилителя, выходом к одному из входов суммирующего усилителя, который подключен другим входом к выходу датчика тока якоря, а выходом к управляющему входу преобразователя, к выходу которого подсоединена обмотка возбуждения двигателя.
Данный электропривод может обеспечить достаточно высокое качество регулирования при параметрических возмущениях постоянных времени цепей возбуждения и якоря двигателя. Однако к параметрическому возмущению коэффициента усиления объекта управления этот электропривод имеет недостаточно малую чувствительность. Следовательно, рассматриваемый электропривод не может гарантировать достаточно высокое качество регулирования.
Цель изобретения снижение чувствительности к параметрическим возмущениям и повышение качества регулирования.
Поставленная цель достигается тем, что предложен электропривод с адаптивным регулированием тока, содержащий двигатель постоянного тока с датчиком тока якоря, подсоединенный обмоткой возбуждения к выходу преобразователя, задатчик тока и инерционный фильтр, подключенный входом к задатчику тока и выходом к первому входу первого регулятора тока, подсоединенного вторым входом к выходу датчика тока якоря и выходом к первому входу второго регулятора тока, подключенного вторым входом к выходу датчика тока якоря и третьим входом к задатчику тока, в который введены блок умножения, блок деления, предварительный усилитель, два фильтра высокой частоты, два блока выделения модуля, четыре суммирующих элемента, источник напряжения смещения, два дифференцирующих фильтра и датчик напряжения питания, причем блок умножения подключен одним входом к выходу второго регулятора тока, другим входом к выходу блока деления и выходом через предварительный усилитель к управляющему входу преобразователя, первый суммирующий элемент подсоединен первым входом к задатчику тока, вторым входом к выходу второго регулятора тока, третьим входом к выходу датчика тока якоря и выходом через первый фильтр высокой частоты к одному из входов второго суммирующего элемента, который подключен другим входом через первый дифференцирующий фильтр к выходу датчика тока якоря и выходом через первый блок выделения модуля к одному из входов третьего суммирующего элемента, который подсоединен другим входом к источнику напряжения смещения и выходом к входу делителя блока деления, второй фильтр высокой частоты подключен входом к выходу блока умножения и выходом через второй блок выделения модуля к одному из входов четвертого суммирующего элемента, который подсоединен другим входом к источнику напряжения смещения и выходом к входу делимого блока деления, а датчик напряжения питания подключен выходом через второй дифференцирующий фильтр к четвертому входу второго регулятора тока.
Отличительная особенность предложенного электропривода заключается в том, что он содержит параметрическую обратную связь которая замыкается через блок умножения, образуя контур самонастройки коэффициента усиления прямой цепи электропривода. При этом сигнал параметрической обратной связи на выходе блока деления обратно пропорционален коэффициенту усиления объекта управления контуров регулирования тока электропривода. Этот сигнал формируется путем, во-первых, измерения производной тока с помощью первого дифференцирующего фильтра, во-вторых, суммирования измеренного сигнала во втором суммирующем элементе с составляющей управляющего воздействия, предназначенной для компенсации собственного движения указанного выше объекта управления, а также медленно действующих неизмеримых внешних возмущающих воздействий, и, в-третьих, деления в блоке деления на полученный сигнал выходного сигнала второго фильтра высокой частоты, который представляет собой модель высокочастотных звеньев контура самонастройки коэффициента усиления прямой цепи электропривода.
За счет указанной параметрической обратной связи обеспечивается единичный коэффициент усиления прямой цепи электропривода независимо от того, как бы ни менялся коэффициент усиления объекта управления контуров регулирования тока. Тем самым осуществляется адаптация (самонастройка) и достигается инвариантность (нулевая чувствительность) электропривода к параметрическому возмущению коэффициента усиления электромагнитной цепи двигателя.
Кроме того, предложенный электропривод содержит компенсирующую связь по возмущению напряжения питания двигателя. Она реализована путем подключения выхода датчика напряжения питания через второй дифференцирующий фильтр к четвертому входу второго регулятора тока. Эта компенсирующая связь необходима для сохранения достаточно высокого качества регулирования при отработке быстро (резко) меняющегося напряжения питания двигателя, что характерно, в частности, для тягового электропривода электроподвижного состава.
Первый суммирующий элемент и первый фильтр высокой частоты необходимы в предложенном электроприводе для получения составляющей управляющего воздействия, предназначенной для компенсации собственного движения объекта управления контуров регулирования тока, а также медленно действующих неизмеримых внешних возмущающих воздействий. Для этого из выходного сигнала второго регулятора тока, пропорционального требуемому значению производной тока, в первом суммирующем элементе вычитается сигнал, пропорциональный значению производной тока эталонной модели электропривода. При этом указанный последний сигнал формируется в том же первом суммирующем элементе путем сравнения выходных сигналов задатчика тока и датчика тока якоря.
Блоки выделения модуля с источником напряжения смещения, третьим и четвертым суммирующими элементами необходимы в предложенном электроприводе для того, чтобы исключить неопределенность результата деления в блоке деления при равенстве нулю выходных сигналов второго суммирующего элемента и второго фильтра высокой частоты.
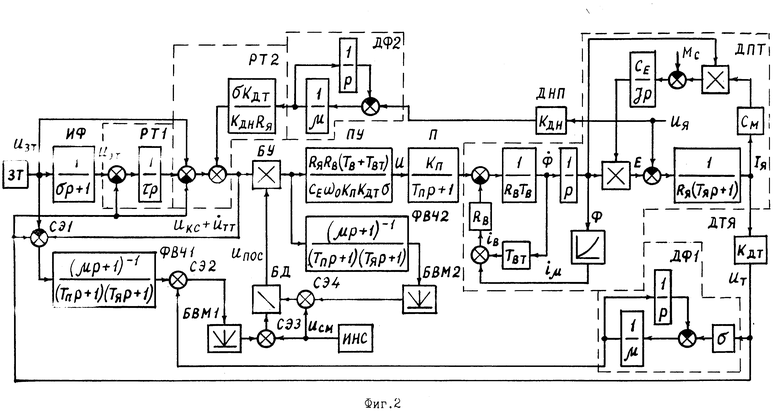
На фиг. 1 приведена блок-схема электропривода с адаптивным регулированием тока; на фиг. 2 его структурная схема.
Электропривод с адаптивным регулированием тока содержит двигатель постоянного тока (ДПТ) 1 с датчиком тока якоря (ДТЯ) 2, подсоединенный обмоткой возбуждения к выходу преобразователя (П) 3, задатчик тока (ЗТ) 4 и инерционный фильтр (ИФ) 5, два регулятора тока (РТ1 и РТ2) 6 и 7, блок умножения (БУ) 8, блок деления (БД) 9, предварительный усилитель (ПУ) 10, два фильтра высокой частоты (ФВЧ1 и ФВЧ2) 11 и 12, два блока выделения модуля (БВМ1 и БВМ2) 13 и 14, четыре суммирующих элемента (СЭ1 СЭ4) 15-18, источник напряжения смещения (ИНС) 19, два дифференцирующих фильтра (ДФ1 и ДФ2) 20 и 21 и датчик напряжения питания (ДНП) 22, причем РТ1 6 подключен первым входом через ИФ 5 к ЗТ 4, вторым входом к выходу ДТЯ 2 и выходом к первому входу РТ2 7, который подсоединен вторым входом к выходу ДТЯ 2 и третьим входом к ЗТ 4, БУ 8 подключен одним входом к выходу РТ2 7, другим входом к выходу БД 9 и выходом через ПУ 10 к управляющему входу П 3, СЭ1 15 подсоединен первым входом к ЗТ 4, вторым входом к выходу РТ2 7, третьим входом к выходу ДТЯ 2 и выходом через ФВЧ1 11 к одному из входов СЭ2 16, который подключен другим входом через ДФ1 20 к выходу ДТЯ 2 и выходом через БВМ1 13 к одному из входов СЭ3 17, который подсоединен другим входом к ИНС 19 и выходом к входу делителя БД 9, ФВЧ2 12 подключен входом к выходу БУ 8 и выходом через БВМ2 14 к одному из входов СЭ4 18, который подсоединен другим входом к ИНС 19 и выходом к входу делителя БД 9, а ДНП 22 подключен выходом через ДФ2 21 к четвертому входу РТ2 7.
На структурной схеме предложенного электропривода, которая представлена на фиг. 2, приняты следующие обозначения: Кп, Tп параметры преобразователя; RB, RBT, TB, TBT параметры цепи возбуждения; RЯ, TЯ параметры цепи якоря; СE, CM конструктивные постоянные коэффициента двигателя; KДТ, KДН - коэффициенты передачи соответственно датчика тока якоря и датчика напряжения питания; J приведенный момент инерции нагрузки; μ постоянная времени дифференцирующих фильтров; s постоянная времени инерционного фильтра; s = 2(Tп+ Tя+ μ); τ постоянная времени интегрального регулятора, τ = 2σ; φ магнитный поток; Iя ток якоря; w скорость вращения двигателя; UЗТ сигнал задания тока; UT выходной сигнал датчика тока якоря; iμ - намагничивающий ток; E ЭДС двигателя; Мc момент сопротивления нагрузки; Uя напряжение питания цепи якоря; U управляющее воздействие;  сигнал, пропорциональный требуемому значению производной тока; Uпос сигнал параметрической обратной связи; Ukc сигнал компенсирующий связи; Uсм напряжение смещения; Uэт выходной сигнал инерционного фильтра; Uп выходной сигнал преобразователя.
сигнал, пропорциональный требуемому значению производной тока; Uпос сигнал параметрической обратной связи; Ukc сигнал компенсирующий связи; Uсм напряжение смещения; Uэт выходной сигнал инерционного фильтра; Uп выходной сигнал преобразователя.
Структурной схеме электропривода соответствует следующая система уравнений:
уравнение инерционного фильтра
(σp + 1)Uэт= Uзт;
уравнение преобразователя
(TпP + 1)Uп KпU;
уравнение цепи возбуждения двигателя
RB(TВ+ TВТ)Pφ = Uп- Rвiμ,
где iμ= f-1(φ) нелинейная функция, обратная нелинейности основной кривой намагничивания f = f(iμ);
уравнение якорной цепи двигателя
Rя(TяP+1)Iя -Uя + E,
где E = CЕφω ;
уравнение равновесия моментов на валу двигателя
Jpω = CмIяφ - Mc;
уравнение управляющего устройства
где 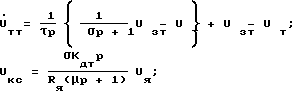

причем 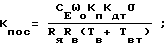
 сигнал, пропорциональный эталонному значению производной тока,
сигнал, пропорциональный эталонному значению производной тока,
На основании приведенной системы уравнений и представленной на фиг. 2 структурной схемы можно записать уравнение движения предложенного электропривода
При этом можно отметить, что полоса пропускания высокочастотных звеньев с постоянными времени Tп, Tя и мю значительно шире полосы равномерного пропускания частот электропривода. И если в силу отмеченного пренебречь инерционностью высокочастотных звеньев (как это делается, в частности, в системах подчиненного регулирования /3/), то уравнение движения электропривода вырождается в уравнение инерционного звена первого порядка, т.е.
(σp + 1)Uт = Uзт.
Электропривод с адаптивным регулированием тока работает следующим образом.
Сигнал с задатчика тока (ЗТ) 4 поступает на вход инерционного фильтра (ИФ) 5, на первый вход первого суммирующего элемента (СЭ1) 15 и на третий вход второго регулятора тока (РТ2) 7, который является пропорциональным. На другие входы этого регулятора поступают выходные сигналы второго дифференцирующего фильтра (ДФ2) 21, датчика тока якоря (ДТЯ) 2 и первого регулятора тока (РТ1) 6, который является интегральным. Поступающие на входы РТ2 7 сигналы суммируются в нем, полученный результирующий сигнал усиливается и затем поступает на второй вход первого суммирующего элемента (СЭ1) 15 и на один из входов блока умножения (БУ) 9 сигнал, обратно пропорциональный коэффициенту усиления объекта управления контуров регулирования тока. В БУ 8 его входные сигналы перемножаются и результирующий сигнал поступает на вход второго фильтра высокой частоты (ФВЧ2) 12 и на вход предварительного усилителя (ПУ) 10. В ПУ 10 его входной сигнал усиливается и поступает далее на управляющий вход преобразователя (П) 3, который изменяет напряжение питания обмотки возбуждения двигателя постоянного тока (ДПТ) 1. В результате начинают изменяться магнитный поток, ЭДС, ток якоря ДПТ 1 и, соответственно, выходной сигнал ДТЯ 2 до тех пор, пока последний не станет равным сигналу ЗТ 4.
При этом для того, чтобы выходной сигнал БД 9 был обратно пропорционален коэффициенту усиления объекта управления контуров регулирования тока, выходные сигналы ЗТ 4 и РТ2 7 суммируются в СЭ1 15 с выходным сигналом ДТЯ 2. Результирующий сигнал с выхода СЭ1 15 поступает на вход первого фильтра высокой частоты (ФВЧ1) 11, который представляет собой модель высокочастотных звеньев контура самонастройки коэффициента усиления прямой цепи электропривода. Выходной сигнал ФВЧ1 11 поступает на один из входов второго суммирующего элемента (СЭ2) 16, на другой вход которого поступает через первый дифференцирующий фильтр (ДФ1) 20 выходной сигнал ДТЯ 2. В СЭ2 16 его входные сигналы суммируются и результирующий сигнал через первый блок выделения модуля (БВМ1) 13 поступает на вход третьего суммирующего элемента (СЭ3) 17, в котором суммируется с выходным сигналом источника напряжения смещения (ИНС) 19 и полученный суммарный сигнал подается на вход делителя БД 9.
В это же время выходной сигнал ФВЧ2 12 поступает через второй блок выделения модуля (БВМ2) 14 на один из входов четвертого суммирующего элемента (СЭ4) 18. Указанный сигнал суммируется в СЭ4 18 с выходным сигналом ИНС 19 и полученный результирующий сигнал подается на вход делимого БД 9.
В свою очередь, РТ1 6 вступает в работу и изменяет свой выходной сигнал только тогда, когда выходной сигнал ДТЯ 2 будет отличаться от выходного сигнала ИФ 5.
Работоспособность предложенного электропривода проверена путем моделирования его на ЭВМ. В результате моделирования установлено, что предложенный электропривод с адаптивным регулированием тока имеет нулевую чувствительность к параметрическому возмущению коэффициента усиления электромагнитной цепи двигателя, за счет чего он и обеспечивает достаточно высокое качество регулирования во всем рабочем диапазоне изменения указанного коэффициента усиления.
Таким образом, введением дополнительных элементов достигается инвериантность предложенного электропривода относительно параметрического возмущения коэффициента усиления его прямой цепи, повышение качества регулирования и снижение чувствительности к изменению его параметров.
Использование: автоматизированный электропривод, автоматическое регулирование тока электропривода с изменяющимися параметрами. Сущность: инерционный фильтр (ИФ) подключен входом к задатчику тока (ЗТ) и выходом к первому входу первого регулятора тока (РТ1), вторым входом к выходу датчика тока якоря (ДТЯ) и третьим входом к ЗТ. Блок умножения (БУ) подсоединен одним входом к выходу РТ2, другим входом к выходу блока деления (БД) и выходом через предварительный усилитель (ПУ) к управляющему входу преобразователя П. Первый суммирующий элемент (СЭ1) подключен первым входом к ЗТ, вторым входом к выходу РТ2, третьим входом к выходу ДТЯ и выходом к входу первого фильтра высокой частоты (ФВЧ1). Второй суммирующий элемент (СЭ2) подсоединен одним входом к выходу ФВЧ1, другим входом через первый дифференцирующий фильтр (ДФ1) к выходу ДТЯ и выходом к входу первого блока выделения модуля (БВМ1). Третий суммирующий элемент (СЭ3) подключен одним входом к выходу БВМ1, другим входом к источнику напряжения смещения (ИНС) и выходом к входу делителя БД. Второй фильтр высокой частоты (ФВЧ2) подключен входом к выходу БУ и выходом к входу второго блока выделения модуля (БВМ2). Четвертый суммирующий элемент (СЭ4) подсоединен одним входом к выходу БВМ2, другим входом к ИНС и выходом к входу делимого БД. Датчик напряжения питания (ДНП) подключен выходом через второй дифференцирующий фильтр (ДФ2) к четвертому входу РТ2. Введением в электропривод дополнительных элементов обеспечивается его инвариантность к параметрическим возмущениям, т.е. снижается чувствительность к изменению параметров электропривода и повышается качество регулирования. 2 ил.
Электропривод с адаптивным регулированием тока, содержащий двигатель постоянного тока с датчиком тока якоря, подсоединенный обмоткой возбуждения к выходу преобразователя, задатчик тока и инерционный фильтр, подключенный входом к задатчику тока и выходом к первому входу первого регулятора тока, который подсоединен вторым входом к выходу датчика тока якоря и выходом к первому входу второго регулятора тока, подключенного вторым входом к выходу датчика тока якоря и третьим входом к задатчику тока, отличающийся тем, что в него введены блок умножения, подключенный одним входом к выходу второго регулятора тока, другим входом к выходу блока деления и выходом через предварительный усилитель к управляющему входу преобразователя, первый суммирующий элемент, подсоединенный первым входом к задатчику тока, вторым входом к выходу второго регулятора тока, третьим входом к выходу датчика тока якоря и выходом через первый фильтр высокой частоты к одному из входов второго суммирующего элемента, который подключен другим входом через первый дифференцирующий фильтр к выходу датчика тока якоря и выходом через первый блок выделения модуля к одному из входов третьего суммирующего элемента, который подсоединен другим входом к источнику напряжения смещения и выходом - к входу делителя блока деления, второй фильтр высокой частоты, подключенный входом к выходу блока умножения и выходом через второй блок выделения модуля
к одному из входов четвертого суммирующего элемента, который подсоединен другим входом к источнику напряжения смещения и выходом к входу делимого блока деления, и датчик напряжения питания, подключенный выходом через второй дифференцирующий фильтр к четвертому входу второго регулятора тока.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1155992, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 1552327, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
