Изобретение относится к электрическому транспорту, а именно к электроподвижному составу с автоматически регулируемым независимым возбуждением тяговых электродвигателей и может быть использовано для автоматического регулирования скорости, сил тяги и рекуперативно-реостатного торможения электровоза постоянного тока.
Известно устройство для автоматического регулирования скорости и сил тяги и электрического торможения многосекционного электровоза [1] содержащее установленные на ведущей секции электровоза задатчик скорости, задатчик сил тяги и торможения и на каждой секции электровоза регулятор скорости, подключенный одним входом к выходу датчика скорости, другим входом к выходу задатчика скорости и выходом к первому входу узла выделения минимального сигнала, регулятор сил тяги и торможения, подключенный выходом ко второму входу узла выделения минимального сигнала, одним входом к выходу задатчика сил тяги и торможения и другим входом к выходу блока умножения, который подсоединен одним входом к выходу датчика тока якоря и другим входом через блок нелинейного преобразования сигналов к выходу датчика тока возбуждения, регулятор тока якоря, подключенный одним входом к выходу узла выделения минимального сигнала, другим входом к выходу датчика тока якоря и выходом ко входу преобразователя напряжения возбуждения, с выходом которого через датчик тока возбуждения соединены обмотки возбуждения тяговых электродвигателей, причем блок нелинейного преобразования сигналов выполнен в виде статического функционального преобразователя сигнала датчика тока возбуждения в сигнал, пропорциональный магнитному потоку тяговых электродвигателей.
Недостатки этого устройства заключаются в следующем. Во-первых, данное устройство не может гарантировать высокое качество регулирования потому, что оно содержит нелинейную обратную связь по силам тяги и торможения, которая является мультипликативно линейной по току якоря и нелинейной по току возбуждения, а регулятор сил тяги и торможения является линейным.
Во-вторых, рассматриваемое устройство не может обеспечить высокую точность межсекционного выравнивания сил тяги и торможения ни в переходных режимах, ни в установившемся режиме стабилизации указанных сил. Это объясняется тем, что вследствие неидентичности магнитных характеристик и, соответственно, токов якорей тяговых двигателей, а также статических характеристик вход-выход блоков нелинейного преобразования сигналов разных секций электровоза, выходные сигналы регуляторов сил тяги и торможения могут отличаться друг от друга.
Наиболее близким к предлагаемому по своей технической сущности является устройство для автоматического регулирования скорости и сил тяги, и электрического торможения многосекционного электровоза [2] содержащее установленные на каждой секции электровоза регулятор скорости, подключенный одним входом к выходу датчика скорости, другим входом к выходу задатчика скорости и выходом к первому входу узла выделения минимального сигнала, ко второму входу которого подсоединен через задатчик интенсивности сигналов задатчик сил тяги и торможения, регулятор сил тяги и торможения, подключенный одним входом к выходу узла выделения минимального сигнала и другим входом к выходу блока умножения, который подсоединен одним входом к выходу датчика тока якоря и другим входом через блок нелинейного преобразования сигналов к выходу датчика тока возбуждения, регулятор тока возбуждения, подключенный одним входом к выходу датчика тока возбуждения, другим входом к выходу регулятора тока якоря, который подсоединен первым входом к выходу датчика тока якоря и выходом ко входу преобразователя напряжения возбуждения, с выходом которого через датчик тока возбуждения соединены обмотки возбуждения тяговых электродвигателей, причем регулятор тока якоря каждой ведомой секции подключен вторым входом к выходу датчика тока якоря ведущей секции и регулятор тока якоря ведущей секции к выходу регулятора сил тяги и торможения своей секции, а блок нелинейного преобразования сигналов выполнен в виде статического функционального преобразователя сигнала датчика тока возбуждения в сигнал, пропорциональный магнитному потоку тяговых электродвигателей.
В этом устройстве контуры регулирования тока якоря тяговых электродвигателей ведомых секций электровоза, по сути, отслеживают, хотя и с запаздыванием, закон изменения выходного сигнала датчика тока якоря ведущей секции. Поэтому данное устройство обеспечивает достаточно высокую точность межсекционного выравнивания сил тяги и торможения в установившемся статическом режиме. Однако это устройство не может гарантировать высокую точность межсекционного выравнивания сил тяги и торможения в переходных режимах при отработке как изменения сигналов задания по скорости и силам тяги и торможения, так и возмущающих воздействий. Это происходит потому, что токи якорей тяговых электродвигателей ведомых секций сдвинуты по фазе относительно тока якоря тяговых электродвигателей ведущей секции электровоза из-за инерционности соответствующих контуров регулирования якорных токов.
Кроме того, изменение тока якоря ведущей секции электровоза при отработке устройством возмущающих воздействий, например, таких как скачок напряжения контактной сети, будет оказывать отрицательное влияние на качество регулирования тока якоря и, соответственно, скорости и сил тяги и торможения ведомых секций. К тому же данное устройство не может гарантировать достаточно высокое качество регулирования еще и потому, что оно, как и ранее рассмотренное устройство, содержит нелинейную обратную связь по силам тяги и торможения.
Наконец, анализируемое устройство является излишне сложным, так как содержит, в частности, в режиме стабилизации скорости четыре одновременно работающих контура регулирования. А как известно [3] многоконтурные системы автоматического регулирования имеют высокую чувствительность к параметрическим возмущениям. И поэтому такие системы опять же не могут гарантировать высокое качество регулирования, если их объекты управления являются нелинейными и имеют нестабильные параметры.
Задача изобретения повышение качества регулирования, точности межсекционного выравнивания сил тяги и торможения в переходных режимах и упрощение устройства.
Решение поставленной задачи достигается тем, что в устройстве для автоматического регулирования скорости и сил тяги и электрического торможения многосекционного электровоза, содержащем установленные на каждой секции электровоза регулятор скорости, подключенный первым входом к выходу датчика скорости и выходом к первому входу узла выделения минимального сигнала, задатчик интенсивности сигналов, блок умножения, блок нелинейного преобразования сигналов, соединенный выходом с первым входом блока умножения, регулятор тока якоря тяговых электродвигателей, подключенный первым входом к выходу датчика тока якоря, преобразователь напряжения возбуждения, с выходом которого через датчик тока возбуждения соединены обмотки возбуждения тяговых электродвигателей, и установленные на ведущей секции электровоза задатчик скорости, подключенный выходом ко второму входу регулятора скорости всех секций, и задатчик сил тяги и электрического торможения, на каждой ведомой секции электровоза установлен суммирующий усилитель и на всех секциях - инерционный фильтр, при этом на каждой секции электровоза блок нелинейного преобразования сигналов выполнен в виде статического функционального преобразователя сигнала датчика тока возбуждения в сигнал, обратнопропорциональный магнитному потоку тяговых электродвигателей, инерционный фильтр включен между выходом датчика тока возбуждения и входом блока нелинейного преобразования сигналов, второй вход блока умножения соединен с выходом задатчика сил тяги и электрического торможения ведущей секции электровоза, выход узла выделения минимального сигнала через задатчик интенсивности сигналов подключен ко второму входу регулятора тока якоря, выход которого соединен со входом преобразователя напряжения возбуждения, на ведущей секции электровоза выход блока умножения подключен ко второму входу узла выделения минимального сигнала непосредственно, а на каждой ведомой секции - через суммирующий усилитель, входы которого соединены с выходами датчиков тока якоря своей и ведущей секций.
Подключением на каждой из ведомых секций электровоза вторых входов регулятора скорости и блока умножения к выходам соответственно задатчика скорости и задатчика сил тяги и электрического торможения ведущей секции, а также второго входа регулятора тока якоря через задатчик интенсивности сигналов к выходу узла выделения минимального сигнала этой же секции достигается повышение точности межсекционного выравнивания сил тяги и электрического торможения в переходных режимах.
Исключением из устройства регуляторов тока возбуждения и сил тяги и электрического торможения с соответствующей нелинейной обратной связью обеспечивается упрощение устройства, снижение его чувствительности к параметрическим возмущениям и повышение качества регулирования. Ведь в предложенном устройстве блоки нелинейного преобразования сигналов и блоки умножения используются в цепях уже не обратных связей по силам тяги и торможения, а в цепях формирования сигналов задания тока якоря тяговых электродвигателей. Именно в эти цепи включены также инерционные фильтры, чтобы быстропротекающие переходные процессы по току возбуждения, обусловленные отработкой возмущающих воздействий в контурах регулирования тока якоря, практически не влияли на формирование сигналов задания тока якоря.
Наконец, введение в устройство устанавливаемого на каждой из ведомых секций электровоза суммирующего усилителя, подключенного входами к выходам датчиков тока якоря своей и ведущей секций, предназначено для устранения того возможного межсекционного небаланса сил тяги и электрического торможения, который мог бы возникнуть из-за неидентичности статических характеристик вход-выход блоков нелинейного преобразования сигналов.
На чертеже представлена функциональная блок-схема предложенного устройства для автоматического регулирования скорости и сил тяги и электрического торможения многосекционного электровоза. Устройство расположено на ведущей секции 1, ведомых секциях 2 и 3 и содержит установленные на каждой секции 1, 2 и 3 электровоза регулятор 4 (5) скорости, подключенный первым входом к выходу датчика 6 (7) скорости и выходом к первому входу узла 8 (9) выделения минимального сигнала, задатчик 10 (11) интенсивности сигналов, блок 12 (13) умножения, блок 14 (15) нелинейного преобразования сигналов, соединенный выходом с первым входом блока 12 (13) умножения, регулятор 16 (17) тока якоря тяговых электродвигателей, подключенный первым входом к выходу датчика 18 (19) тока якоря, преобразователь 20 (21) напряжения возбуждения, с выходом которого через датчик 22 (23) тока возбуждения соединены обмотки возбуждения тяговых электродвигателей 24, 25 (26, 27) и инерционный фильтр 28 (29), установленные на ведущей секции 1 электровоза задатчик 30 скорости, подключенный выходом ко второму входу регуляторов 4 и 5 скорости всех секций, и задатчик 31 сил тяги и электрического торможения, на каждой ведомой секции 2 и 3 суммирующий усилитель 32, при этом на всех секциях 1, 2 и 3 электровоза блок 14 (15) нелинейного преобразования сигналов выполнен в виде статического функционального преобразователя сигнала датчика 22 (23) тока возбуждения в сигнал, обратнопропорциональный магнитному потоку тяговых электродвигателей, инерционный фильтр 28 (29) включен между выходом датчика 22 (23) тока возбуждения и входом блока 14 (15) нелинейного преобразования сигналов, второй вход блока 12 (13) умножения соединен с выходом задатчика 31 сил тяги и электрического торможения ведущей секции 1 электровоза, выход узла 8 (9) выделения минимального сигнала через задатчик 10 (11) интенсивности сигналов подключен ко второму входу регулятора 16 (17) тока якоря, выход которого соединен со входом преобразователя 20 (21) напряжения возбуждения, на ведущей секции 1 электровоза выход блока 12 умножения подключен ко второму входу узла 8 выделения минимального сигнала непосредственно, а на каждой ведомой секции 2 и 3 выход блока 13 умножения ко второму входу узла 9 выделения минимального сигнала через суммирующий усилитель 32, входы которого соединены с выходами датчика 19 тока якоря своей и датчика 18 тока якоря ведущей секций.
Заметим, что сущность предложенного технического решения раскрыта по отношению только к одной паре последовательно соединенных тяговых электродвигателей каждой секции электровоза. Это сделано потому, что управление другими параллельно включенными парами последовательно соединенных тяговых электродвигателей каждой секции осуществляется аналогично: от индивидуальных преобразователей напряжения возбуждения с индивидуальными регуляторами тока якоря и датчиками скорости тока возбуждения и тока якоря. При этом регуляторы тока якоря подключают выходами ко входам соответствующих преобразователей напряжения возбуждения и входами к соответствующим датчикам тока якоря и выходу одного и того же задатчика интенсивности сигналов своей секции, первый вход регулятора скорости каждой секции к датчикам скорости своей секции через дополнительный узел выделения максимального сигнала в режиме тяги, вход инерционного фильтра каждой секции к датчикам тока возбуждения своей секции через другой дополнительный узел выделения максимального сигнала, а третий вход суммирующего усилителя каждой ведомой секции к датчикам тока якоря ведущей секции через еще один дополнительный узел выделения максимального сигнала.
Устройство для автоматического регулирования скорости и сил тяги и электрического торможения многосекционного электровоза работает следующим образом.
Пусть, например, в режиме рекуперативного торможения электровоз движется под уклон и сигнал задания по скорости, поступающий на вторые входы пропорциональных регуляторов 4 и 5 скорости меньше, чем сигналы, поступающие на их первые входы с датчиков 6 и 7 скорости соответственно. При этом выходной сигнал каждого из регуляторов 4 и 5 скорости меньше, чем выходной сигнал соответственно блока 12 умножения и суммирующего усилителя 32, но постепенно увеличивается. Тогда в определенный момент времени выходные сигналы регуляторов 4 и 5 скорости могут стать больше, чем соответствующие выходные сигналы блока 12 умножения и суммирующего усилителя 32. Но так как указанные выходные сигналы поступают на входы соответствующих узлов 8 и 9 выделения минимального сигнала, то эти узлы 8 и 9 переключают устройство в режим стабилизации силы торможения. В этом режиме выходные сигналы узлов 8 и 9 выделения минимального сигнала равны друг другу и выходным сигналам блоков 12 и 13 умножения и суммирующего усилителя 32 при условии, конечно, что поступающие на входы этого усилителя 32 сигналы датчиков 18 и 19 тока якоря тоже равны друг другу. Следовательно, выходные сигналы блоков 12 и 13 умножения являются в рассматриваемом режиме сигналами задания тока якоря тяговых электродвигателей 24, 25 и 26, 27 соответственно. Эти сигналы формируются в блоках 12 и 13 умножения путем перемножения сигнала задания силы торможения, поступающего с задатчика 31 сил тяги и электрического торможения, и сигнала, поступающего с выхода соответственно блока 14 и 15 нелинейного преобразования сигналов и обратнопропорционального магнитному потоку тяговых электродвигателей 24, 25 и 26, 27.
Выходные сигналы узлов 8 и 9 выделения минимального сигнала поступают через соответствующие задатчики 10 и 11 интенсивности сигналов, в которых нормируется темп их изменения, на вторые входы регуляторов 16 и 17 тока якоря, на первые входы которых поступают выходные сигналы датчиков 18 и 19 тока якоря. Сигналы рассогласования между поступающими на входы регуляторов 16 и 17 тока якоря сигналами преобразуются в них по пропорционально-интегрально-дифференциальному закону. Преобразованные сигналы поступают далее на входы соответствующих преобразователей 20 и 21 напряжения возбуждения, с выходами которых через датчики 22 и 23 тока возбуждения соединены обмотки возбуждения тяговых электродвигателей 24, 25 и 26, 27 соответственно.
В результате напряжение питания обмоток возбуждения будет изменяться таким образом, что выходные сигналы датчиков 18 и 19 тока якоря будут равны сигналам задания тока якоря, которые формируются блоками 12 и 13 умножения из сигнала задания силы торможения и сигнала, обратнопропорционального магнитному потоку тяговых электродвигателей 24, 25 и 26, 27.
Если же выходные сигналы датчиков 6 и 7 скорости станут меньше выходного сигнала задатчика 30 скорости, а выходные сигналы регуляторов 4 и 5 скорости меньше выходных сигналов соответственно блока 12 умножения и суммирующего усилителя 32, то узлы 8 и 9 выделения минимального сигнала переключают устройство в режим стабилизации скорости.
Заметим также, что представленное описание предложенного технического решения ориентировано на аппаратную реализацию устройства. Однако сущность его не изменится, если устройство реализовать программно на микропроцессорной базе.
Таким образом, введением в устройство для автоматического регулирования скорости, сил тяги и электрического торможения многосекционного электровоза суммирующих усилителей и инерционных фильтров, исключением из него регуляторов тока возбуждения и сил тяги и электрического торможения, а также изменением вида выполнения блоков нелинейного преобразования сигналов, достигается повышение качества регулирования и точности межсекционного выравнивания сил тяги и электрического торможения в переходных режимах и упрощение устройства.
Источники, принятые во внимание заявителем.
1. Тулупов В.Д. Автоматическое регулирование сил тяги и торможения электроподвижного состава. М. Транспорт, 1976, с.332, рис.XII.8.
2. Электровозостроение: Сборник науч. тр. /Всерос. Научно-исслед. проектно-констр. ин-т электровозостроения. Новочеркасск, 1985, Т.26, с.14, рис. 2 и с.20, рис.6.
3. А.с.1156992 СССР, МКИ G 05 B 11/01. Опубл. в БИ, 1985, N18.
Использование: электроподвижной состав с автоматически регулируемым независимым возбуждением тяговых электродвигателей, многосекционные электровозы постоянного тока. Сущность изобретения: на ведущей и каждой из ведомых секций имеются регулятор скорости, блок умножения, узел выделения минимального сигнала, задатчик интенсивности сигналов, регулятор тока якоря тяговых электродвигателей, преобразователь напряжения возбуждения, датчики токов возбуждения и якоря, блок нелинейного преобразования сигналов. Кроме того, на ведущей секции предусмотрены задатчик скорости и задатчик сил тяги и электрического торможения, связанные и с ведомыми секциями, а на последних дополнительно установлены суммирующие усилители. На всех без исключения секциях размещено также по одному инерционному фильтру, обеспечивающему быстродействующий переходный процесс по току возбуждения при обработке возмущающих воздействий в контуре регулирования тока якоря. Блоки нелинейного преобразования сигналов используются, в отличие от известных устройств, не в обратных связях, а в цепях формирования сигналов задания тока якоря тяговых электродвигателей. 1 ил.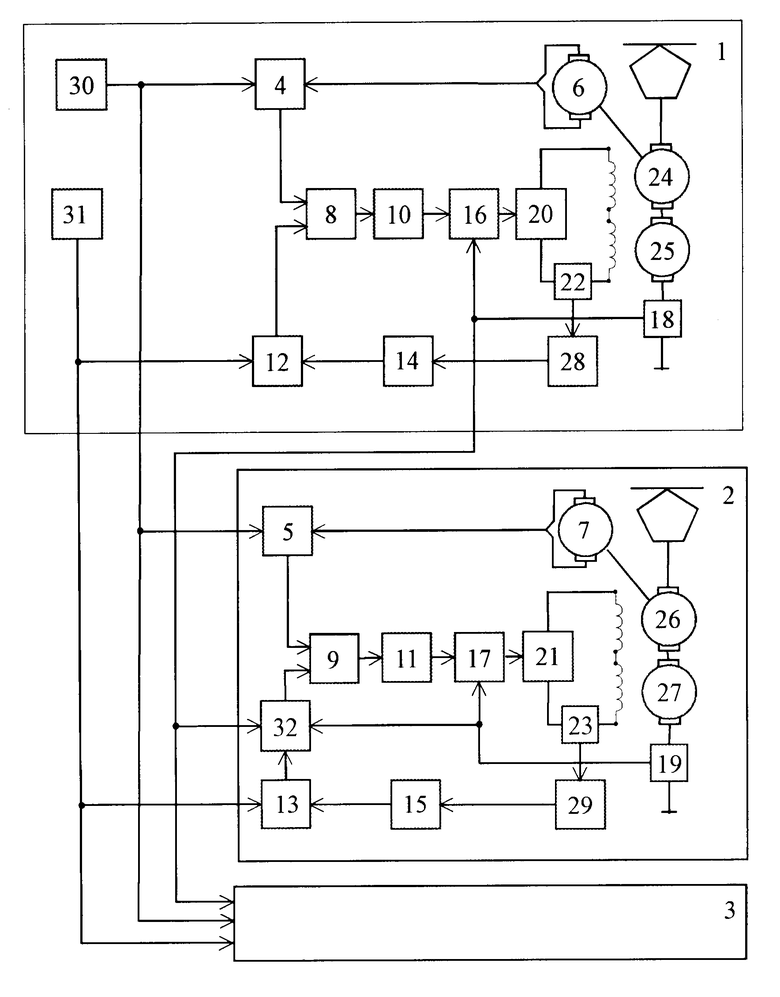
Устройство для автоматического регулирования скорости и сил тяги и электрического торможения многосекционного электровоза, содержащее установленные на каждой секции электровоза регулятор скорости, подключенный первым входом к выходу задатчика скорости и выходом к первому входу узла выделения минимального сигнала, задатчик интенсивности сигналов, блок умножения, блок нелинейного преобразования сигналов, соединенный выходом с первым входом блока умножения, регулятор тока якоря тяговых электродвигателей, подключенный первым входом к выходу датчика тока якоря, преобразователь напряжения возбуждения, с выходом которого через датчик тока возбуждения соединены обмотки возбуждения тяговых электродвигателей, и установленные на ведущей секции электровоза задатчик скорости, подключенный выходом к второму входу регулятора скорости каждой секции, и задатчик сил тяги и электрического торможения, отличающееся тем, что на каждой секции электровоза установлен инерционный фильтр, на каждой ведомой секции суммирующий усилитель, а блок нелинейного преобразования сигналов каждой секции выполнен в виде статического функционального преобразователя сигнала датчика тока возбуждения в сигнал, обратнопропорциональный магнитному потоку тяговых электродвигателей, при этом на каждой секции электровоза инерционный фильтр включен между выходом датчика тока возбуждения и входом блока нелинейного преобразования сигналов, второй вход блока умножения соединен с выходом задатчика сил тяги и электрического торможения ведущей секции электровоза, выход узла выделения минимального сигнала через задатчик интенсивности сигналов подключен к второму входу регулятора тока якоря, выход которого соединен с входом преобразователя напряжения возбуждения, на ведущей секции электровоза выход блока умножения подключен к второму входу узла выделения минимального сигнала непосредственно, а на каждой ведомой секции через суммирующий усилитель, входы которого соединены с выходами датчиков тока якоря своей и ведущей секций.
| Электровозостроение: Сб.научных трудов | |||
| - Новочеркасск, Всероссийский научно-исследовательский и проектно-конструкторский институт электровозостроения, 1985, т | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
