Изобретение относится к автоматизированному электроприводу и может быть использовано для автоматического регулирования тока электродвигателей постоянного и переменного тока, параметры которых, их нагрузка, а также уровень питающего напряжения являются нестационарными.
Известен электропривод с комбинированным управлением по производной тока [Патент RU 2181523 С2, Н 02 Р 5/06, 20.04.2002], который содержит двигатель с датчиком тока, подключенный к выходу преобразователя, последовательно соединенные задатчик тока, инерционный фильтр и пропорционально-интегральный регулятор тока, два интегросумматора и три суммирующих усилителя, причем первый суммирующий усилитель подключен первым входом к выходу задатчика тока, вторым входом через первый интегросумматор к выходу пропорционально-интегрального регулятора тока и выходом ко второму входу первого интегросумматора и через второй суммирующий усилитель ко входу преобразователя, третий суммирующий усилитель подсоединен первым входом через второй интегросумматор к выходу первого суммирующего усилителя и выходом ко вторым входам второго суммирующего усилителя и второго интегросумматора, а датчик тока подключен своим выходом ко вторым входам пропорционально-интегрального регулятора тока и третьего суммирующего усилителя.
Регулирование тока в этом электроприводе является комбинированным потому, что он имеет канал управления по отклонению тока и дифференциальную компенсирующую связь по косвенно измеренному возмущению производной тока. Однако данный электропривод не может гарантировать достаточно высокое качество регулирования тока при отработке внешних возмущающих воздействий. Например, таких как резкое изменение уровня питающего напряжения контактной сети в тяговом электроприводе электроподвижного состава. Это объясняется тем, что компенсирующая связь в рассматриваемом электроприводе образует контур локализации возмущений. В него входят второй суммирующий усилитель, преобразователь, двигатель с датчиком тока и третий суммирующий усилитель. При этом величина коэффициента усиления второго суммирующего усилителя выбирается исходя из компромисса между качеством переходных процессов и точностью регулирования тока в установившемся режиме.
Наиболее близким аналогом (прототипом) к предлагаемому техническому решению является электропривод с координатно-параметрическим регулированием тока [Патент RU 2095930 С1, Н 02 Р 5/06, 10.11.1997], который содержит двигатель с датчиками тока и напряжения питания, подключенный к выходу преобразователя, последовательно соединенные задатчик тока, инерционный фильтр, первый регулятор тока, второй регулятор тока, первый суммирующий элемент, первый фильтр высокой частоты, второй суммирующий элемент, первый блок выделения модуля, третий суммирующий элемент, блок деления и блок умножения, подключенный вторым входом к выходу второго регулятора тока и выходом через предварительный усилитель ко входу преобразователя, при этом датчик тока подсоединен выходом ко вторым входам первого суммирующего элемента, обоих регуляторов тока и второго суммирующего элемента через первый дифференцирующий фильтр, задатчик тока подключен выходом к третьим входам первого суммирующего элемента и второго регулятора тока, который своим четвертым входом подсоединен через второй дифференцирующий фильтр к выходу датчика напряжения питания, а источник напряжения смещения подключен выходом ко вторым входам третьего суммирующего элемента и четвертого суммирующего элемента, который подсоединен выходом ко второму входу блока деления и первым входом через последовательно соединенные второй фильтр высокой частоты и второй блок выделения модуля к выходу блока умножения, причем первый регулятор тока выполнен интегральным, а второй регулятор тока - пропорциональным.
Этот электропривод имеет параметрическую обратную связь, с помощью которой стабилизируется статический коэффициент усиления прямой цепи электропривода. Значение же динамического коэффициента усиления, например из-за нелинейности основной кривой намагничивания магнитопровода в электродвигателе постоянного тока с управлением в цепи возбуждения, изменяется с изменением магнитного потока и может существенно отличаться от статического коэффициента усиления. Но именно от динамического коэффициента усиления зависят запасы устойчивости электропривода и качество его переходных процессов по току. Следовательно, данный электропривод не может гарантировать достаточно высокую динамическую точность во всем достаточно широком рабочем диапазоне изменения магнитного потока электродвигателя постоянного тока, что характерно для работы тяговых двигателей электроподвижного состава.
Кроме того, параметрическая обратная связь электропривода с координатно-параметрическим регулированием тока включает в себя достаточно сложный по конструкции вычислитель обратного коэффициента усиления объекта управления контура регулирования тока. В состав указанного вычислителя входят блок деления и еще десять вспомогательных элементов, с помощью которых формируются входные сигналы блока деления.
Более того, рассматриваемый электропривод не может обеспечить достаточно высокую точность регулирования тока при отработке внешнего возмущающего воздействия в виде резкого изменения уровня питающего напряжения. В частности, из-за соответствующего изменения напряжения контактной сети, от которой питается тяговый электропривод электроподвижного состава. Это обусловлено тем, что компенсирующая связь по указанному возмущению в рассматриваемом электроприводе реагирует лишь на скорость изменения питающего напряжения, но не реагирует на абсолютную величину возмущения.
Задача изобретения - построение электропривода с координатно-параметрическим управлением по производной тока, благодаря новой структуре которого обеспечивается технический результат в виде повышения точности регулирования тока и упрощения конструкции электропривода.
Решение поставленной задачи достигается тем, что предложен электропривод с координатно-параметрическим управлением по производной тока, содержащий двигатель с датчиком тока, подключенный к выходу преобразователя, последовательно соединенные задатчик тока, первый инерционный фильтр, первый регулятор тока, второй регулятор тока и блок умножения, блок выделения модуля и дифференцирующий фильтр, подключенный входом к выходу датчика тока, в который введены суммирующий усилитель, который подсоединен первым входом к выходу первого регулятора тока, вторым входом к выходу блока умножения и выходом ко входу преобразователя, нелинейный усилитель и второй инерционный фильтр, который подключен входом к выходу датчика тока и выходом ко второму входу первого регулятора тока и через блок выделения модуля ко второму входу блока умножения, второй регулятор тока подсоединен вторым входом к выходу дифференцирующего фильтра и третьим входом через нелинейный усилитель к своему выходу, причем первый регулятор тока выполнен пропорциональным, а второй регулятор тока - пропорционально-интегральным.
Исключением из электропривода с координатно-параметрическим управлением по производной тока целого ряда излишних элементов, введением в него трех новых элементов и изменением в нем некоторых межэлементных связей обеспечивается повышение точности регулирования тока и упрощение конструкции электропривода.
На чертеже приведена функциональная схема электропривода с координатно-параметрическим управлением по производной тока.
Электропривод с координатно-параметрическим управлением по производной тока содержит двигатель 1 с датчиком 2 тока, подключенный к выходу преобразователя 3, последовательно соединенные задатчик 4 тока, первый инерционный фильтр 5, первый регулятор 6 тока, второй регулятор 7 тока и блок 8 умножения, блок 9 выделения модуля и дифференцирующий фильтр 10, подключенный входом к выходу датчика 2 тока, суммирующий усилитель 11, подсоединенный первым входом к выходу первого регулятора 6 тока, вторым входом к выходу блока 8 умножения и выходом ко входу преобразователя 3, нелинейный усилитель 12 и второй инерционный фильтр 13, который подключен входом к выходу датчика 2 тока и выходом ко второму входу первого регулятора 6 тока и через блок 9 выделения модуля ко второму входу блока 8 умножения, второй регулятор 7 тока подсоединен вторым входом к выходу дифференцирующего фильтра 10 и третьим входом через нелинейный усилитель 12 к своему выходу, причем первый регулятор 6 тока выполнен пропорциональным, а второй регулятор 7 тока - пропорционально-интегральным.
Движение предложенного электропривода описывается следующим уравнением:

где τ - постоянный коэффициент; UФ5, UФ13 - выходные сигналы первого и второго инерционных фильтров 5 и 13, с одной и той же передаточной функцией

причем μ - малая постоянная времени, значение которой обратно пропорционально граничной частоте требуемой полосы равномерного пропускания первого и второго инерционных фильтров 5 и 13.
Движение предложенного электропривода подчиняется уравнениям (1) и (2) в силу следующего управляющего воздействия:

где  ,
,  - номинальные значения активного сопротивления и постоянной времени цепи питания двигателя 1; КП, КД - коэффициенты передачи преобразователя 3 и датчика 2 тока;
- номинальные значения активного сопротивления и постоянной времени цепи питания двигателя 1; КП, КД - коэффициенты передачи преобразователя 3 и датчика 2 тока;  - сигнал, пропорциональный предписанному уравнением (1) закону изменения производной тока, т.е.
- сигнал, пропорциональный предписанному уравнением (1) закону изменения производной тока, т.е.

γ - выходной сигнал второго регулятора 7 тока,

причем UДФ - выходной сигнал дифференцирующего фильтра 10 с передаточной функцией
WДФ(р)=τр/(1+μр);
σ=τ/2=2μ; Δγ - выходной сигнал нелинейного усилителя 12,
Особенность предложенного электропривода с координатно-параметрическим управлением по производной тока заключается в том, что его управляющее воздействие (3) содержит две составляющие. Первая, координатная составляющая, пропорциональная требуемому закону изменения производной тока (4), формируется каналом управления по отклонению тока с помощью первого пропорционального регулятора 6 тока. Вторая, координатно-параметрическая составляющая формируется каналом локальной координатной обратной связи по току с регулируемым коэффициентом усиления γ. Причем регулирование указанного параметра γ локальной обратной связи по току осуществляется вторым пропорционально-интегральным регулятором 7 тока по отклонению производной тока от ее требуемого закона изменения (4).
При этом нелинейный усилитель 12, включенный в обратную связь второго регулятора 7 тока, необходим для ограничения коэффициента усиления и обеспечения, тем самым, устойчивости соответствующего контура локализации внутренних и внешних возмущений электропривода. Нелинейный усилитель 12 имеет нелинейную статическую характеристику (6) типа "зона нечувствительности" и может быть реализован аналогично известному техническому решению [см., например, кн.: Тетельбаум И.М., Шнейдер Ю.Р. 400 схем для АВМ. - М.: Энергия, 1978, с.68, схема 2-8-1].
Второй инерционный фильтр 13, выходной сигнал которого используется в первом регуляторе 6 тока для формирования сигнала (4), введен в электропривод для обеспечения такого же запаздывания, которое вносит дифференцирующий фильтр 10, выходной сигнал которого сравнивается во втором регуляторе 7 тока с выходным сигналом первого регулятора 6 тока. В свою очередь, первый инерционный фильтр 4 необходим для компенсации форсирующего действия основного контура регулирования тока, которое обусловлено наличием в его обратной связи второго инерционного фильтра 13.
Электропривод с координатно-параметрическим управлением по производной тока работает следующим образом.
Сигнал задания с выхода задатчика 4 поступает через первый инерционный фильтр 5 на первый вход первого регулятора 6 тока, на второй вход которого поступает через второй инерционный фильтр 13 выходной сигнал датчика 2 тока. Регулятор 6 тока сравнивает между собой свои входные сигналы и формирует сигнал (4), пропорциональный требуемому закону изменения производной тока. Этот сигнал с выхода первого регулятора 6 тока поступает через суммирующий усилитель 11 на вход преобразователя 3, который стремится изменить напряжение питания двигателя 1 таким образом, чтобы выходные сигналы обоих инерционных фильтров 1 и 13 стали равны друг другу.
Одновременно с этим выходной сигнал первого регулятора 6 тока поступает на первый вход второго регулятора 7 тока, на второй и третий входы которого поступают выходные сигналы соответственно дифференцирующего фильтра 10 и нелинейного усилителя 12. В регуляторе 7 тока его входные сигналы алгебраически суммируются и суммарный сигнал преобразуется по пропорционально-интегральному закону (5). В результате на выходе второго регулятора 7 тока формируется сигнал, пропорциональный такому коэффициенту усиления γ модуля выходного сигнала второго инерционного фильтра 13  , который необходим для компенсации суммарного возмущения производной тока. Сигнал с выхода второго регулятора 7 тока поступает на первый вход блока 8 умножения, на второй вход которого поступает через последовательно соединенные блок 9 выделения модуля и второй инерционный фильтр 13 выходной сигнал датчика 2 тока. В блоке 8 умножения его входные сигналы перемножаются и полученный сигнал с выхода блока 8 умножения поступает через суммирующий усилитель 11 на вход преобразователя 3. Преобразователь 3 изменяет напряжение питания двигателя 1 до тех пор, пока алгебраическая сумма входных сигналов второго регулятора 7 тока не станет равной нулю.
, который необходим для компенсации суммарного возмущения производной тока. Сигнал с выхода второго регулятора 7 тока поступает на первый вход блока 8 умножения, на второй вход которого поступает через последовательно соединенные блок 9 выделения модуля и второй инерционный фильтр 13 выходной сигнал датчика 2 тока. В блоке 8 умножения его входные сигналы перемножаются и полученный сигнал с выхода блока 8 умножения поступает через суммирующий усилитель 11 на вход преобразователя 3. Преобразователь 3 изменяет напряжение питания двигателя 1 до тех пор, пока алгебраическая сумма входных сигналов второго регулятора 7 тока не станет равной нулю.
Заметим, что представленное описание предложенного технического решения ориентировано на аппаратную реализацию управляющей части электропривода. Но сущность его не изменится, если управляющую часть электропривода с координатно-параметрическим управлением по производной тока реализовать программно на микроконтроллере.
Работоспособность и точность регулирования тока электропривода с координатно-параметрическим управлением по производной тока исследовалась методом моделирования его на ПЭВМ. В результате такого исследования установлено, что предложенный электропривод имеет монотонную переходную характеристику и апериодические переходные процессы по току при отработке внешних возмущающих воздействий, а также обеспечивает нулевую установившуюся ошибку.
Таким образом, благодаря изменению структуры электропривода с координатно-параметрическим управлением по производной тока путем исключения из него целого ряда излишних элементов, введения в него трех новых элементов и изменения в нем некоторых межэлементных связей обеспечивается повышение точности регулирования тока и упрощение конструкции электропривода.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННАЯ СИСТЕМА КООРДИНАТНО-ПАРАМЕТРИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2004 |
|
RU2279116C2 |
| ЭЛЕКТРОПРИВОД С УПРАВЛЕНИЕМ ПО ПРОИЗВОДНОЙ ТОКА | 2000 |
|
RU2181523C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1991 |
|
RU2039371C1 |
| ЭЛЕКТРОПРИВОД С АДАПТИВНЫМ РЕГУЛИРОВАНИЕМ ТОКА | 1993 |
|
RU2095930C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2002 |
|
RU2230350C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1999 |
|
RU2150728C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ И СИЛ ТЯГИ И ЭЛЕКТРИЧЕСКОГО ТОРМОЖЕНИЯ МНОГОСЕКЦИОННОГО ЭЛЕКТРОВОЗА | 1995 |
|
RU2099210C1 |
| ДВУХКАНАЛЬНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2000 |
|
RU2171489C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
Изобретение относится к автоматизированному электроприводу и может быть использовано для автоматического регулирования тока электродвигателей постоянного и переменного тока, параметры которых, их нагрузка, а также уровень питающего напряжения являются нестационарными. Технический результат заключается в повышении точности регулирования тока и упрощении конструкции электропривода. Электропривод содержит двигатель с датчиком тока, преобразователь, задатчик тока, первый инерционный фильтр, первый регулятор тока второй регулятор тока, блок умножения, блок выделения модуля и дифференцирующий фильтр, также введены суммирующий усилитель, нелинейный усилитель и второй инерционный фильтр, при этом первый регулятор тока выполнен пропорциональным, а второй регулятор тока - пропорционально-интегральным. 1 ил.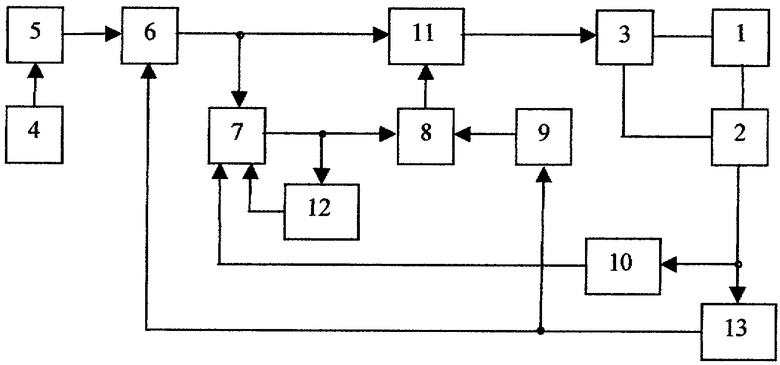
Электропривод с координатно-параметрическим управлением по производной тока, содержащий двигатель с датчиком тока, подключенный к выходу преобразователя, последовательно соединенные задатчик тока, первый инерционный фильтр, первый регулятор тока, второй регулятор тока и блок умножения, блок выделения модуля и дифференцирующий фильтр, подключенный входом к выходу датчика тока, отличающийся тем, что в него введены суммирующий усилитель, подсоединенный первым входом к выходу первого регулятора тока, вторым входом к выходу блока умножения и выходом ко входу преобразователя, нелинейный усилитель и второй инерционный фильтр, который подключен входом к выходу датчика тока и выходом ко второму входу первого регулятора тока и через блок выделения модуля ко второму входу блока умножения, второй регулятор тока подсоединен вторым входом к выходу дифференцирующего фильтра и третьим входом через нелинейный усилитель к своему выходу, причем первый регулятор тока выполнен пропорциональным, а второй регулятор тока - пропорционально-интегральным.
| ЭЛЕКТРОПРИВОД С АДАПТИВНЫМ РЕГУЛИРОВАНИЕМ ТОКА | 1993 |
|
RU2095930C1 |
| ЭЛЕКТРОПРИВОД С УПРАВЛЕНИЕМ ПО ПРОИЗВОДНОЙ ТОКА | 2000 |
|
RU2181523C2 |
| Электропривод | 1988 |
|
SU1552327A1 |
| Электропривод | 1985 |
|
SU1506503A1 |

