Изобретение относится к электрическому транспорту, а именно к устройствам управления тяговым приводом электровозов, и может быть использовано на электровозах переменного тока с общим источником питания для последовательно соединенных обмоток возбуждения и для параллельно соединенных якорных обмоток тяговых двигателей.
Известно устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения [1]. Это устройство содержит линейный регулятор силы тяги. Однако тяговый привод электровоза является нелинейным объектом, параметры которого изменяются в широких пределах. Следовательно, рассматриваемое устройство не может гарантировать устойчивую и надежную работу, достаточно высокие точность и качество управления. Кроме того, оно не может обеспечить перевод двигателей в режим ослабленного поля, так как ток возбуждения в нем пропорционален току якорных обмоток.
Наиболее близким по технической сущности к предлагаемому является устройство для управления тяговым приводом электровоза переменно-постоянного тока, содержащее тиристорный преобразователь, соединенный одним входом с выходом первого фазорегулятора, другим входом - с первым выходом тягового трансформатора, а выходом - с якорными обмотками тяговых электродвигателей, управляемый выпрямитель, соединенный выходом с шунтированными резисторами и тиристорами обмотками возбуждения тяговых электродвигателей, одним входом - с вторым выходом тягового трансформатора, а другим входом - с выходом второго фазорегулятора, вход которого подключен к выходу регулятора тока возбуждения, первым входом подключенного к датчику тока возбуждения, а вторым через первый блок ограничения - к выходу регулятора ЭДС, первый вход которого через второй блок ограничения соединен с выходом датчика напряжения управляемого выпрямителя, а второй вход подключен к выходу первого блока выделения минимального сигнала, соединенного входами с датчиками ЭДС, регулятор скорости, выход которого подключен к первому входу второго блока выделения минимального сигнала, соединенного вторым входом с выходом задатчика силы тяги, а выходом - с входом задатчика интенсивности, первый вход - к задатчику скорости, а второй вход - к выходу третьего блока выделения минимального сигнала, соединенного входами с датчиками частоты вращения, регуляторы выравнивания якорных токов, выходы которых подключены к первым входам блоков управления, соединенных выходами с управляющими электродами тиристоров, первые входы подключены к датчикам якорных токов и соединены с входами блока выделения максимального сигнала, выход которого подсоединен к вторым входам регуляторов выравнивания и к первым входам множительного устройства и регулятора ослабления поля, второй вход которого и вход функционального преобразователя подключены к датчику тока возбуждения, а выход функционального преобразователя соединен с вторым входом множительного устройства, регулятор силы тяги, выход которого подключен к входу первого фазорегулятора и соединен через функциональный преобразователь с третьим входом регулятора ЭДС, первый вход подключен к выходу множительного устройства, второй - к выходу задатчика интенсивности, а третий вход - к выходу регулятора ослабления поля [2].
Это устройство может обеспечить приемлемые точность и качество управления в режиме полного поля тяговых двигателей, когда управление тяговым приводом осуществляется путем регулирования выходного напряжения тиристорного преобразователя при постоянном магнитном потоке двигателей. Однако в режиме ослабленного поля тяговых двигателей, переход в который осуществляется автоматически после того, как величина выходного сигнала регулятора силы тяги становится больше величины зоны нечувствительности первого функционального преобразователя, управление тяговым приводом осуществляется путем регулирования выходного напряжения управляемого выпрямителя. В этом режиме устройство становится многоконтурной, в частности четырехконтурной, системой подчиненного регулирования. При этом основным контуром регулирования, от которого зависят устойчивость работы, динамическая точность и качество управления, является контур регулирования силы тяги. Настройка и работа этого контура регулирования зависит от влияния подчиненных ему контуров регулирования ЭДС и тока возбуждения тяговых двигателей. Но многоконтурная система подчиненного регулирования имеет высокую чувствительность к изменению своих параметров. Поэтому она может работать устойчиво и гарантировать высокие динамическую точность и качество управления только тогда, когда ее объект управления является линейным и изменением его параметров можно пренебречь.
В этом устройстве при переходе тяговых двигателей в режим ослабленного поля их магнитный поток начинает изменяться и объект управления контура регулирования силы тяги становится нелинейным (из-за нелинейности основной кривой намагничивания, а также нелинейной зависимости силы тяги от магнитного потока и якорных токов тяговых двигателей).
Таким образом, известное устройство не может обеспечить достаточно устойчивую и надежную работу, а также высокие динамическую точность и качество управления в режиме ослабленного поля тяговых двигателей. Кроме того, устройство не гарантирует устойчивую и надежную работу регуляторов выравнивания якорных токов двигателей, так как в качестве сигнала задания в этих регуляторах используется сигнал, пропорциональный максимальному из якорных токов. Поэтому в контуре регулирования того регулятора, на входы которого по каналу задания и по каналу обратной связи будет поступать один и тот же сигнал, пропорциональный максимальному из якорных токов, не исключено вследствие технологического разброса параметров регулятора возникновение положительной обратной связи.
Цель изобретения - повышение надежности устройства, точности и качества управления тяговым приводом электровоза с двигателями независимого возбуждения.
Это достигается тем, что устройство для управления тяговым приводом электровоза переменно-постоянного тока, содержащее тиристорный преобразователь, соединенный одним входом с выходом первого фазорегулятора, другим входом - с первым выходом тягового трансформатора, а выходом - с якорными обмотками тяговых электродвигателей, управляемый выпрямитель, соединенный выходом с шунтированными резисторами и тиристорами обмотками воз- буждения тяговых электродвигателей, одним входом - с вторым выходом тягового трансформатора, а другим входом - с выходом второго фазорегулятора, вход которого подключен к выходу регулятора тока возбуждения, первым входом подключенного к датчику тока возбуждения, а вторым через первый блок ограничения - к выходу регулятора ЭДС, первый вход которого через второй блок ограничения соединен с выходом датчика напряжения управляемого выпрямителя, а второй вход подключен к выходу первого блока выделения минимального сигнала, соединенного входами с датчиками ЭДС, регулятор скорости, выход которого подключен к первому входу второго блока выделения минимального сигнала, соединенного выходом с входом задатчика интенсивности, первый вход - к задатчику скорости, а второй вход - к выходу третьего блока выделения минимального сигнала, соединенного входами с датчиками частоты вращения, регуляторы выравнивания якорных токов, выходы которых подключены к первым входам блоков управления, соединенных выходами с управляющими электродами тиристоров, а первые входы соединены с входами блока выделения максимального сигнала и подключены к датчикам якорных токов, регулятор ослабления поля и функциональный преобразователь, входы которых подключены к датчику тока возбуждения, снабжено регулятором и задатчиком якорных токов, выход последнего из которых подключен к второму входу второго блока выделения минимального сигнала, при этом выход регулятора якорных токов подключен к входу первого фазорегулятора, первый вход - к выходу блока выделения максимального сигнала, а второй - к выходу задатчика интенсивности и соединен с третьим входом регулятора ЭДС, с вторыми входами регуляторов выравнивания якорных токов и с вторым входом регулятора ослабления поля, выход которого подключен к третьему входу регулятора тока возбуждения, выход функционального преобразователя соединен с вторыми входами блоков управления.
Применение регулятора якорного тока в канале управления напряжением тиристорного преобразователя известно в системе двухзонного управления общепромышленным электроприводом. Изменение магнитного потока и соответственно ЭДС двигателя в рассматриваемой системе обусловлено только изменением частоты вращения двигателя и поэтому происходит значительно более медленно, чем процесс отработки возмущающих воздействий в контуре регулирования якорного тока. Кроме того, хотя рассматриваемый электропривод и является в целом нелинейным объектом, объект же управления контура регулирования якорного тока является линейным. От этого контура регулирования зависят в основном устойчивость работы устройства, динамическая точность и качество управления. Благодаря этому регулятор якорного тока в общепромышленном электроприводе гарантирует устойчивость его работы, а также достаточно высокие динамическую точность и качество управления. Но в общепромышленном электроприводе переход в режим ослабленного поля осуществляется тогда, когда ЭДС двигателя достигает своего номинального значения. Поэтому в качестве сигнала задания регулятора ЭДС двигателя используется постоянное напряжение источника напряжения смещения.
В устройстве для управления тяговым приводом электровоза использовать постоянное напряжение в качестве сигнала задания регулятора ЭДС двигателей невозможно по следующим причинам. Во-первых, источником питания тягового привода электровоза является контактная сеть, напряжение которой изменяется в достаточно широких пределах (до -30% и +25% от номинального значения). Во-вторых, ресурсы тиристорного преобразователя в цепи питания якорных обмоток двигателей ограничены из-за его массогабаритных показателей. Следовательно, достижение номинального значения ЭДС двигателей за счет выходного напряжения тиристорного преобразователя не всегда возможно. Поэтому сигнал задания регулятора ЭДС двигателей в устройстве для управления тяговым приводом электровоза не может быть постоянной величиной и его необходимо формировать таким, чтобы переход двигателей в режим ослабленного поля происходит в тот момент, когда выходное напряжение тиристорного преобразователя достигает своего наибольшего возможного значения. В предлагаемом устройстве сигнал задания регулятора ЭДС двигателей формируется в результате алгебраического суммирования его входных сигналов, поступающих с выходов задатчика интенсивности и второго блока ограничения напряжения. При этом выходной сигнал последнего пропорционален наибольшему возможному значению выходного напряжения тиристорного преобразователя, а выходной сигнал задатчика интенсивности - заданному значению якорных токов двигателей.
Введение в устройство регулятора якорных токов в совокупности с подключением одного из входов регулятора ЭДС двигателей к выходу задатчика интенсивности, во-первых, повышает надежность устройства за счет исключения из него регулятора силы тяги, одного из функциональных преобразователей и множительного устройства. Во-вторых, повышается динамическая точность и качество управления тяговым приводом электровоза. Это достигается благодаря тому, что в предлагаемом устройстве основным контуром регулирования, от которого зависит устойчивость работы устройства, динамическая точность и качество управления, является контур регулирования якорных токов. И хотя тяговый привод электровоза, как и общепромышленный, является в целом нелинейным объектом (из-за нелинейности основной кривой намагничивания двигателей и нелинейной зависимости силы тяги от магнитного потока и якорных токов), объект управления контура регулирования якорных токов в отличие от контура регулирования силы тяги является линейным. Кроме того, подключение одного из входов регулятора ЭДС двигателей к выходу задатчика интенсивности делает работу регулятора якорных токов независимой от работы контуров регулирования ЭДС и тока возбуждения, а также позволяет ограничить ско-рость изменения ЭДС двигателей на таком уровне, чтобы изменение ЭДС тяговых двигателей происходило значительно более медленно, чем процесс отработки возмущающих воздействий в контуре регулирования якорных токов.
Введение в устройство задатчика тока якорных токов вместо задатчика силы тяги позволяет изменить величину ограничения силы тяги (якорных токов) без применения дополнительного функционального преобразователя выходного сигнала задатчика силы тяги в сигнал задания якорных токов.
Подключение одного из входов регуляторов выравнивания якорных токов к выходу задатчика интенсивности исключает возможность возникновения положительной обратной связи в контурах выравнивания якорных токов и тем самым повышает устойчивость и надежность их работы.
Подключение к выходу функционального преобразователя, который преобразует выходной сигнал датчика тока возбуждения в сигнал, пропорциональный магнитному потоку тяговых двигателей, одного из входов блоков управления, каждый из которых состоит из последовательно соединенных множительного устройства и фазорегулятора, необходимо для линеаризации нелинейной зависимости якорных токов от тока возбуждения. Этим, как и в [1], обеспечивается повышение устойчивости контуров выравнивания якорных токов во всем допустимом диапазоне изменения тока возбуждения.
Указанные отличительные признаки в совокупности обеспечивают появление у предлагаемого устройства новых свойств, что позволяет при реализации устройства повысить его надежность, точность и качество управления.
На чертеже представлена структурная схема устройства для управления тяговым приводом электровоза.
Устройство содержит регулятор 1 скорости, подключенный одним входом к задатчику 2 скорости, другим входом - к выходу третьего блока 3 выделения минимального сигнала, который входами соединен с датчиками 4 и 5 частоты вращения двигателей. Выход регулятора скорости 1 соединен с первым входом второго блока 6 выделения минимального сигнала, который соединен вторым входом с задатчиком 7 якорных токов, а выходом - с входом задатчика 8 интенсивности. Выход задатчика интенсивности 8 подключен к второму входу регулятора 9 ослабления поля, а также к вторым входам регуляторов 10, 11 выравнивания якорных токов, к третьему входу регулятора 12 ЭДС двигателей и к второму входу регулятора 13 якорного тока, который подсоединен первым входом к выходу блока 14 выделения максимального сигнала, связанного входами с датчиками 15, 16 якорных токов. Выход регулятора якорных токов 13 подключен к входу первого фазорегулятора 17, соединенного выходом с одним входом тиристорного преобразователя 18, второй вход которого соединен с первым выходом тягового трансформатора 19. Выход тиристорного преобразователя 18 соединен с якорными обмотками тяговых электродвигателей 20, 21. Обмотки возбуждения 22, 23 двигателей подключены к выходу управляемого выпрямителя 24, который одним входом соединен с вторым выходом тягового трансформатора 19, а вторым входом - с выходом второго фазорегулятора 25. Вход второго фазорегулятора 25 подключен к выходу регулятора 26 тока возбуждения, первый вход которого подключен к выходу датчика 27 тока возбуждения, третьим входом - с выходом регулятора 9 ослабления поля, а вторым входом - через первый блок 28 ограничения к выходу регулятора ЭДС 12. Первый вход регулятора 12 ЭДС соединен через второй блок 29 ограничения с датчиком 30 напряжения управляемого выпрямителя 24, а второй вход - с выходом первого блока 31 выделения минимального сигнала, соединенного входами с датчиками 32, 33 ЭДС. Каждая обмотка 22, 23 возбуждения двигателей шунтирована соответствующими резисторами 34, 35 и тиристорами 36, 37, управляющие электроды которых соединены с выходами блоков управления 38, 39. К первым входам блоков управления 38, 39 подключены выходы регуляторов выравнивания 10, 11, а вторые входы через функциональный преобразователь 40 к выходу датчика 27 тока возбуждения. Вторые входы регуляторов выравнивания соединены с выходами датчиков 15, 16 якорных токов.
Устройство для управления тяговым приводом электровоза работает следующим образом.
Выходной сигнал датчика 30 напряжения управляемого выпрямителя поступает на вход второго блока 29 ограничения напряжения. Блок 29 служит для ограничения поступающего на его вход выходного сигнала датчика 30 на уровне, соответствующем наибольшему допустимому напряжению на коллекторах двигателей. Выходной сигнал U29 блока 29 ограничения напряжения поступает на один из входов регулятора 12 ЭДС двигателей. На другие входы регулятора 12 поступают соответственно выходной сигнал U8 задатчика 8 интенсивности и выходной сигнал U31 первого блока 31 выделения минимального сигнала из поступающих на его входы выходных сигналов датчиков 32 и 33 ЭДС двигателей. В указанном регуляторе 12, который представляет собой последовательное соединение суммирующего усилителя и своего задатчика интенсивности, его входные сигналы алгебраически суммируются и полученный результирующий сигнал U= U29-U8-U31 преобразуется в линейно изменяющийся во времени выходной сигнал. Задатчик интенсивности, входящий в состав регулятора 12 ЭДС двигателей, необходим для ограничения скорости изменения ЭДС тяговых двигателей. Последнее же в свою очередь необходимо для того, чтобы регулятор 13 якорных токов мог обеспечить достаточно высокие динамическую точность и качество управления при отработке такого возмущающего воздействия, как изменение ЭДС тяговых двигателей. Выходной сигнал регулятора 12 поступает далее на вход первого блока 28 ограничения напряжения. Блок 28 служит для ограничения поступающего на его вход выходного сигнала регулятора 12 на уровне, соответствующем наибольшему допустимому значению тока возбуждения двигателей. В частности, пока скорость движения электровоза мала и U29-U8>>U31, выходной сигнал блока 28 будет равен наибольшему допустимому значению. Но по мере роста скорости движения и соответственно U31 выходной сигнал блока 28 начинает уменьшаться. Выходной сигнал U28 блока 28 поступает на один из входов регулятора 26 тока возбуждения, на другой вход которого поступает выходной сигнал U9 регулятора 9 ослабления поля, а на третий вход - выходной сигнал U27 датчика 27 тока возбуждения. В регуляторе 26 его входные сигналы алгебраически суммируются и полученный результирующий сигнал U26'=U28+ U9-U27 преобразуется по пропорционально-интегральному закону. При этом, пока ослабление поля тяговых двигателей не достигнет ограничения по потенциальным условиям на их коллекторах, выходной сигнал регулятора 9 ослабления поля равен нулю. Выходной сигнал регулятора 26 тока возбуждения поступает на вход второго фазорегулятора 25, который формирует импульсы управления для тиристоров управляемого выпрямителя 24, питающего обмотки 22 и 23 возбуждения двигателей. Тем самым осуществляется автоматическое регулирование магнитного поля тяговых двигателей в зависимости от изменения скорости движения электровоза. Если же в процессе работы ослабление поля тяговых двигателей достигает ограничения по потенциальным условиям на их коллекторах, то вступает в работу регулятор 9 ослабления поля и поддерживает значение тока возбуждения на допустимом по потенциальным условиям на коллекторах двигателей уровне. Это происходит, в частности, при условии iв<β iя, т.е. когда значение тока возбуждения iв становится чуть меньше, чем уменьшенное в 1/β раз значение iя якорных токов, причем β - это коэффициент допустимого ослабления поля тяговых двигателей.
Сигналы с датчиков 4 и 5 частоты вращения двигателей поступают на входы третьего блока 3 выделения минимального сигнала. Выходной сигнал блока 3, равный наименьшему из его выходных сигналов, поступает на один из входов регулятора 1 скорости движения. На другой вход регулятора 1 поступает выходной сигнал задатчика 2 скорости движения. В регуляторе 1 скорости движения его входные сигналы сравниваются между собой и полученный сигнал рассогласования усиливается. Выходной сигнал регулятора 1 вместе с выходным сигналом задатчика 7 якорных токов поступают на входы второго блока 6 выделения минимального сигнала. Выходной сигнал блока 6, равный наименьшему из его входных сигналов, поступает на вход задатчика 8 интенсивности, в котором преобразуется в линейно изменяющийся во времени выходной сигнал. При этом постоянная времени задатчика 8 интенсивности должна быть такой, чтобы ограничить на допустимом уровне скорость изменения якорных токов. Выходной сигнал задатчика 8 интенсивности поступает помимо входов регулятора 12, регулятора 9 и регуляторов 10 и 11, на один из входов регулятора 13 якорных токов, на другой вход которого поступает выходной сигнал блока 14 выделения максимального сигнала из поступающих на его входы выходных сигналов датчиков 15 и 16 якорных токов. В регуляторе 13 его входные сигналы сравниваются между собой и полученный сигнал рассогласования усиливается. Выходной сигнал регулятора 13 якорных токов поступает на вход первого фазорегулятора 17, который формирует импульсы управления для тиристорного преобразователя 18. Тем самым осуществляется автоматическое регулирование якорных токов путем изменения выходного напряжения тиристорного преобразователя 18. При этом обеспечиваются достаточно высокие динамическая точность и качество управления за счет того, что отработка возмущающих воздействий при изменении ЭДС двигателей в контуре регулирования якорных токов происходит значительно быстрее, чем изменение магнитного потока и частоты вращения тяговых двигателей.
Регуляторы 10 и 11 выравнивания якорных токов представляют собой последовательное соединение суммирующего усилителя и своего задатчика интенсивности. Задатчик интенсивности, входящий в состав регуляторов 10 и 11, необходим для замедления ошибочной реакции этих регуляторов, направленной на развитие боксования той колесной пары, которая кратковременно потеряла сцепление с рельсами. При этом постоянная времени задатчика интенсивности регуляторов 10 и 11 должна быть такой, чтобы исключить развитие боксования потерявшей сцепление колесной пары. На один из входов регуляторов 10 и 11 выравнивания якорных токов поступает выходной сигнал задатчика 8 интенсивности. На другой вход регуляторов 10 и 11 поступает выходной сигнал соответствующего датчика 15 (16) якорного тока. В регуляторах 10 и 11 их входные сигналы сравниваются между собой и полученные сигналы рассогласования сначала усиливаются, а затем преобразуются в линейно изменяющиеся во времени выходные сигналы. Каждый из этих выходных сигналов поступает на один из входов соответствующего блока 38 (39) управления. На другой вход блоков 38 и 39 поступает через функциональный преобразователь 40 выходной сигнал датчика 27 тока возбуждения. В блоках 38 и 39 управления, каждый из которых состоит из последовательно соединенных множительного устройства и фазорегулятора, их входные сигналы сначала перемножаются между собой, а полученные сигналы затем преобразуются в импульсы открытия соответствующих тиристоров 36 и 37, каждый из которых вместе со своим резистором 34 (35) шунтирует обмотку 22 (23) возбуждения. Путем автоматического регулирования угла открытия тиристоров 36 и 37 изменяется ток, протекающий через них, и соответственно ток, протекающий в обмотках 22 и 23 возбуждения. Тем самым обеспечивается выравнивание якорных токов тяговых двигателей.
Таким образом, предлагаемое устройство по сравнению с известными имеет следующие преимущества:
снижается чувствительность к изменению параметров и повышается надежность устройства за счет исключения из него регулятора силы тяги, одного из функциональных преобразователей и множительного устройства; повышаются динамическая точность и качество управления за счет введения регулятора якорных токов и замедления скорости изменения ЭДС тяговых двигателей по каналу управления их магнитным потоком; обеспечивается перевод тяговых двигателей в режим ослабленного поля в момент достижения выходного напряжения тиристорного преобразователя своего наибольшего возможного значения за счет формирования сигнала задания регулятора ЭДС двигателей в виде алгебраической суммы выходных сигналов задатчика интенсивности и блока ограничения напряжения (выходного сигнала) датчика напряжения питания тиристорного преобразователя. Кроме того, исключается возможность возникновения в контурах выравнивания якорных токов положительной обратной связи и тем самым повышается устойчивость и надежность их работы, а значит всего устройства в целом за счет использования в качестве сигнала задания регуляторов выравнивания якорных токов выходного сигнала задатчика интенсивности.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА | 1990 |
|
RU2013231C1 |
| Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения | 1982 |
|
SU1079493A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ И СИЛ ТЯГИ И ЭЛЕКТРИЧЕСКОГО ТОРМОЖЕНИЯ МНОГОСЕКЦИОННОГО ЭЛЕКТРОВОЗА | 1995 |
|
RU2099210C1 |
| СПОСОБ ВЫРАВНИВАНИЯ НАГРУЗОК ТЯГОВЫХ ДВИГАТЕЛЕЙ | 2001 |
|
RU2207255C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ ТЯГОВЫХ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА НА ЭЛЕКТРОПОДВИЖНОМ СОСТАВЕ | 2007 |
|
RU2344949C1 |
| Устройство для электрического торможения электроподвижного состава переменного тока | 1982 |
|
SU1079491A1 |
| СПОСОБ ВЫРАВНИВАНИЯ НАГРУЗОК ТЯГОВЫХ ДВИГАТЕЛЕЙ | 2004 |
|
RU2283784C2 |
| ЭЛЕКТРОПРИВОД С АДАПТИВНЫМ РЕГУЛИРОВАНИЕМ ТОКА | 1993 |
|
RU2095930C1 |
| Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения | 1988 |
|
SU1595707A2 |
| Устройство для управления тяговым электроприводом электровоза | 1980 |
|
SU1158396A1 |
Использование: в электрическом транспорте, устройствах для управления тяговым приводом электровоза. Сущность изобретения: управление токами якорных обмоток 20, 21 и обмоток 22, 23 возбуждения тяговых электродвигателей, питающихся от тягового трансформатора 19 через тиристорный преобразователь 18 и управляемый выпрямитель 24, осуществляется регулятором 1 скорости и регулятором 13 якорных токов по сигналам от задатчика 2 скорости и задатчика 7 якорного тока. Подключение входа регулятора 12 ЭДС к выходу задатчика 8 интенсивности делает работу регулятора 13 якорных токов независимой от работы контура регулирования регулятора 26 тока возбуждения регулятора 2 ЭДС, что обеспечивает скорость измерения ЭДС значительно меньшей скорости отработки возмущающих воздействие в контуре регулирования якорных оков. В итоге повышаются надежность и точность работы устройства. 1 ил.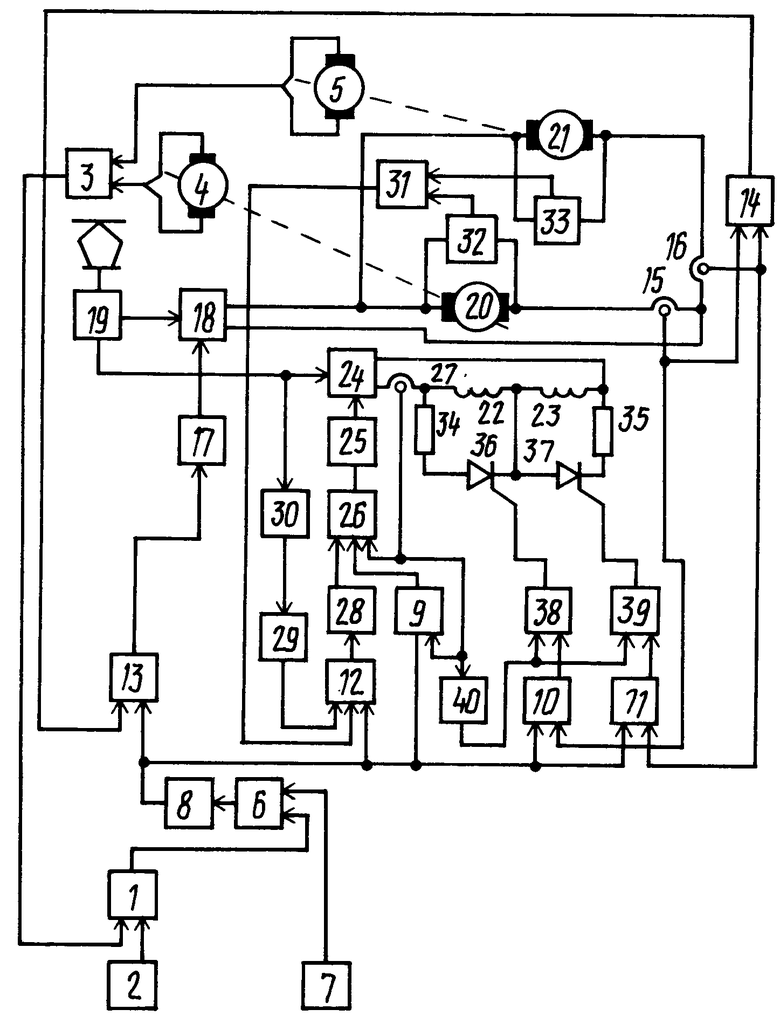
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТЯГОВЫМ ПРИВОДОМ ЭЛЕКТРОВОЗА ПЕРЕМЕННО-ПОСТОЯННОГО ТОКА, содержащее тиристорный преобразователь, соединенный одним входом с выходом первого фазорегулятора, другим входом - с первым выходом тягового трансформатора, а выходом - с якорными обмотками тяговых электродвигателей, управляемый выпрямитель, соединенный выходом с шунтированными резисторами и тиристорными обмотками возбуждения тяговых электродвигателей, одним входом - с вторым выходом тягового трансформатора, а другим входом - с выходом второго фазорегулятора, вход которого подключен к выходу регулятора тока возбуждения, первым входом подключенного к датчику тока возбуждения, а вторым входом через первый блок ограничения - к выходу регулятора ЭДС, первый вход которого через второй блок ограничения соединен с выходом датчика напряжения управляемого выпрямителя, а второй вход подключен к выходу первого блока выделения минимального сигнала, соединенного входами с датчиками ЭДС, регулятор скорости, выход которого подключен к первому входу второго блока выделения минимального сигнала, соединенного выходом с входом задатчика интенсивности, первый вход - к задатчику скорости, а второй вход - к выходу третьего блока выделения минимального сигнала, соединенного входами с датчиками частоты вращения, регуляторы выравнивания якорных токов, выходы которых подключены к первым входам блоков управления, соединенных выходами с управляющими электродами тиристоров, а первые входы соединены с входами блока выделения максимального сигнала и подключены к датчикам якорных токов, регулятор ослабления поля и функциональный преобразователь, входы которых подключены к датчику тока возбуждения, отличающееся тем, что, с целью повышения надежности в работе и точности управления, оно снабжено регулятором и задатчиком якорных токов, выход последнего из которых подключен к второму входу второго блока выделения минимального сигнала, при этом выход регулятора якорных токов подключен к входу первого фазорегулятора, первый вход - к выходу блока выделения максимального сигнала, а второй - к выходу задатчика интенсивности и соединен с третьим входом регулятора ЭДС, с вторыми входами регуляторов выравнивания якорных токов и с вторым входом регулятора ослабления поля, выход которого подключен к третьему входу регулятора тока возбуждения, выход функционального преобразователя соединен с вторыми входами блоков управления.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Грибанов П.Ф | |||
| и др | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Сборник научных трудов Всесоюзного научно-исследовательского, проектно-конструкторского и технологического института электровозостроения | |||
| Новочеркасск, 1987, том.28, с.40-54, рис.2. | |||
