Изобретение относится к оборудованию и технологиям детонационного нанесения покрытий.
Наиболее близкой из известных является детонационная установка для нанесения покрытий, содержащая камеру горения, систему дозировки и транспортировки рабочих газов, систему подачи напыляемого порошка, систему зажигания газовой смеси, систему управления и блок контроля.
Недостатком известной установки является отсутствие возможности контролировать кроме толщины покрытия размеры детали и количество рабочих циклов для напыления оставшегося слоя, т.е. не учитывается влияние геометрических размеров и формы напыляемой поверхности на качество, производительность и точность нанесения покрытий.
Техническим результатом изобретения является оптимизация процесса напыления, повышение производительности, качества и точности нанесения покрытий.
Это достигается тем, что в детонационной установке для нанесения покрытий, содержащей камеру горения, систему дозировки и транспортировки рабочих пазов, систему подачи напыляемого порошка, систему зажигания газовой смеси, систему управления и блок контроля согласно изобретению, блок контроля выполнен в виде оптоэлектронной системы с микроЭВМ, при этом оптоэлектронная система включает лазер, подвижную рамку с призмой для поворота лазерного луча и фотоприемной системой, отсчетную систему и блок формирования сигналов записи текущих координат отсчетной системы, связанный с фотоприемной системой микроЭВМ, выход которой соединен с системой управления.
Сущность изобретения поясняется чертежом, на котором схематически изображена предлагаемая детонационная установка.
Установка детонационного напыления содержит ствол 1 (камеру горения), систему 2 зажигания смеси рабочих газов, систему 3 дозировки и транспортировки в ствол рабочих газов, систему 4 подачи в ствол 1 напыляемого порошка, систему 5 управления, защитную камеру (не показана), манипулятор (не показан) и блок контроля размеров детали, выполненный в виде оптоэлектронной системы с микроЭВМ 15.
Оптоэлектронная система включает лазер 8, подвижную рамку 6 с асинхронным двигателем 7 привода перемещения рамки 6, подвижной призмой 9 для поворота лазерного луча 10 и фотоприемной системой. Фотоприемная система представляет собой фотодиод с системой 11 усиления. Оптоэлектронная система также включает отсчетную систему 12 на основе индуктора, которая предназначена для определения текущих координат подвижной рамки 6, блок 14 формирования сигналов записи текущих координат отсчетной системы 12, связанный с фотоприемной системой 11 и блоком 13 индикации, который формирует адрес памяти микроЭВМ 15. МикроЭВМ 15 предназначена для запоминания текущих координат границ детали, обработки результатов изменений, вывода результатов измерений на дисплей 16, а также формирования величины коррекции и передачи в систему 5 управления, с которой соединен выход микроЭВМ,
В режиме измерения установка работает следующим образом.
После установки напыляемой детали 17 в манипулятор и закрывания защитной камеры в систему 5 управления задают требуемую толщину покрытия, номинальный размер детали до нанесения покрытия, ожидаемое число циклов для формирования слоя покрытия и устанавливают удельный расход рабочих газов по имеющейся технологии напыления. По сигналу расход от микроЭВМ при приближении фактического числа отработанных циклов к ожидаемому система управления прекращает реализацию рабочих циклов и переводит установку в режим измерения. В процессе измерения при включении привода 7 подвижная рамка 6 перемещается горизонтально из исходного положения таким образом, что луч 10 пересекает деталь 17. Фотоприемная система 11 вырабатывает сигналы начала и конца перекрывания луча.
По сигналу от фотодиодов 11 в память микроЭВМ 15 заносятся значения координат подвижной рамки в моменты перекрывания луча. В конечном положении реверсируется двигатель 7 и рамка 6 перемещается в исходное положение. По координатам начала и конца перекрывания луча микроЭВМ определяют диаметр ступени, толщину покрытия, толщину покрытия, наносимого за один рабочий цикл, рассчитывает коррекцию числа оставшихся рабочих циклов и передает информацию в систему 5 управления установкой для исполнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДЕТОНАЦИОННОГО НАПЫЛЕНИЯ | 1997 |
|
RU2140334C1 |
| Устройство обнаружения оптических и оптико-электронных приборов | 2020 |
|
RU2746089C1 |
| СПОСОБ НАНЕСЕНИЯ ПРОСВЕТЛЯЮЩЕГО МНОГОСЛОЙНОГО ПОКРЫТИЯ НА ПОВЕРХНОСТЬ ОПТИЧЕСКОГО ЭЛЕМЕНТА И УСТАНОВКА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1997 |
|
RU2133049C1 |
| Способ контроля размеров ступенчатого вала | 1987 |
|
SU1446461A1 |
| ПЛАЗМЕННО-ДУГОВОЕ УСТРОЙСТВО ФОРМИРОВАНИЯ ПОКРЫТИЙ | 2015 |
|
RU2642237C2 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2005 |
|
RU2299402C1 |
| СПОСОБ ПОЛУЧЕНИЯ ПОГЛОЩАЮЩЕГО СВЧ-ЭНЕРГИЮ ПОКРЫТИЯ | 2019 |
|
RU2712326C1 |
| УСТРОЙСТВО ДЛЯ НАПЫЛЕНИЯ ТОНКОПЛЕНОЧНЫХ ПОКРЫТИЙ НА СФЕРИЧЕСКИЕ РОТОРЫ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2014 |
|
RU2555699C1 |
| Способ изготовления ротора электростатического гироскопа и устройство для осуществления этого способа | 2016 |
|
RU2638870C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2568336C2 |
Использование: изобретение относится к оборудованию и технологиям детонационного нанесения покрытий. Сущность изобретения: блок контроля выполнен в виде оптоэлектронной системы с микроЭВМ 15. Оптоэлектронная система включает лазер 8, подвижную рамку 6 с призмой 9 для поворота лазерного луча 10 и фотоприемной системой, отсчетную систему 12 и блок 14 формирования сигналов записи текущих координат отсчетной системы 12, связанный с фотоприемной системой и микроЭВМ, выход которой соединен с системой 5 управления. По координатам начала и конца перекрывания луча 10 микроЭВМ 15 определяет диаметр ступени, толщину покрытия, наносимого за один рабочий цикл, рассчитывает коррекцию числа оставшихся рабочих циклов и передает информацию в систему 5 управления установкой для исполнения. 1 ил.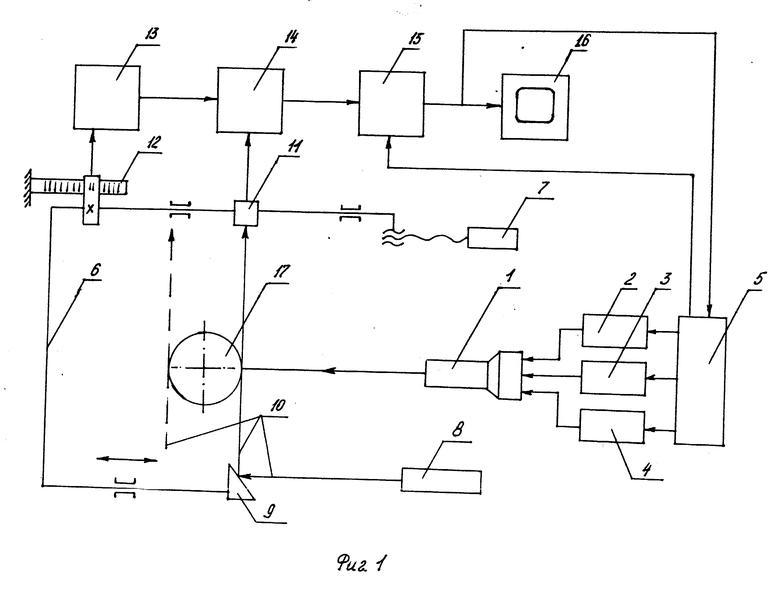
Детонационная установка для нанесения покрытий, содержащая камеру горения, систему дозировки и транспортировки рабочих газов, систему подачи напыляемого порошка, систему зажигания газовой смеси, систему управления и блок контроля, отличающаяся тем, что блок контроля выполнен в виде оптоэлектронной системы с микроЭВМ, при этом оптоэлектронная система включает лазер, подвижную рамку с призмой для поворота лазерного луча и фотоприемной системой, отсчетную систему и блок формирования сигналов записи текущих координат отсчетной системы, связанный с фотоприемной системой и микроЭВМ, выход которой соединен с системой управления.
| Автоматическая установка для детонационного напыления покрытий | 1978 |
|
SU771969A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
