Изобретение относится к транспортному машиностроению, а именно, к велосипедам, приводимым в движение мускульной силой человека.
В настоящее время в мире все большее внимание удаляется развитию экологически чистых видов транспорта, к которым относятся транспортные средства, перемещаемые физической силой человека.
Основными усилия по развитию велосипедов, как традиционного, экологически чистого вида транспорта, направлены в настоящее время на расширение сфер их применения (веломобили, грузопассажирские конструкции, спортивные инвалидные коляски и т.п.), технологичность, разборность для хранения в квартирах, повышение КПД использования мускульной силы человека, улучшение весогабаритных характеристик, изыскание новых рациональных схем привода и т.п.
Наиболее интересны из перечисленных изыскание новых конструктивных схем привода с целью повышения использования физических возможностей человека.
Известны конструкции трехколесных велосипедов с рычажным приводом как ножным /1/, так и ручным /2/, в которых использованы цепные передачи.
Характерным для данных конструкций является низкий по современным меркам процент использования физических возможностей человека, неразборность конструкции.
Известны конструкции трехколесных велосипедов с рычажным приводом как ножным /3/, так и ручным /4/, в которых использованы кривошипо-шатунные механизмы передачи движения на ведущие колеса.
Недостатками данных конструкций являются повышенный вес и габариты конструкций и опять же недостаточный процент использования мускульной силы человека.
Известна конструкция велосипеда /5/, с комплексным рычажным приводом, как ножным, так и ручным, в которых использованы мускульные силы человека. В данной конструкции существенно ухудшились безопасность (ведущая звездка ручной цепной передачи находится перед грудью и лицом велосипедиста), и, что самое важное, управление велосипедом, т. к. руки, выполняя два движения, кручение педалей и поворот, занимают анатомически не очень приятные для человека положения, вызывающие дискомфорт и быструю утомляемость.
Известна конструкция велосипеда /6/, с комплексным рычажным приводом, как ножным, так и ручным, первый из которых традиционная ножная цепная передача, а второй подсоединяемый к верхней ветви цепной передачи храповой механизм с зубчатым колесом, приводимым в движение качающимся рычагом, перемещаемым рукой велосипедиста в продольной плоскости велосипеда.
Недостатком данной конструкции являются как и в предыдущем случае, при некотором повышении показателя использования мускульной силы человека, - ухудшение управляемости велосипедом (управление осуществляется одной рукой при использовании ручного привода), повышенная сложность конструкции из-за наличия узла ручного привода.
Известна конструкция велосипеда /7/, выбранная автором в качестве прототипа, как наиболее близкая по технической сути, в которой использован рычажный ножной привод для передачи усилия велосипедиста к ведущим колесам посредством гибкой связи.
Движение велосипедиста утрированное движение гребца на академической лодке, т. к. при подвижном сидении, подвижных вдоль внутренней трубы ногах (каретка со ступнями движется под постоянным углом 45 60o к траектории движения велосипеда) руки велосипедиста держат руль в одном и том же положении.
Несмотря на то, что в силовом плане движение гребца одно из самых мощных движений человека по энергоотдаче, его конструктивное воплощение в данном велосипеде оказалось недостаточно удачно.
Действительно, при достаточно широкой амплитуде движения ног, совершенно не использованы мощные тяговые мышцы спины из-за не подвижного положения рук, удерживающих руль, что практически сводит на нет положительные моменты по существенному повышению в данной конструкции показателя использования физических возможностей человека.
Задача, которую ставил автор разрабатывая предлагаемую физических возможностей человека, используя известный принцип движения гребца, как наиболее мощное по энергоотдаче движение, без существенного усложнения конструкции.
Эта задача решена в предлагаемой конструкции велосипеда содержащего раму, переднее управляемое колесо, установленное в вилке, седло, тормоз, одно ведущее колесо, установленное в П-образной вилке, ножной рычажный привод на ведущее колесо, связанный с двумя муфтами свободного хода посредством замкнутой гибкой связи включающей цепи Галя, огибающий ролик и трос, за счет того, что, в нем ножной привод выполнен в виде рычага, установленного одним концом на верхней перекладине рамы, с возможностью качания вокруг горизонтальной оси в продольной плоскости велосипеда, и снабженного опорами для ног велосипедиста на другом конце, кроме того, введен ручной привод в виде рычага, установленного в трубчатой направляющей, нижний конец которой размещен с возможностью качания в продольной плоскости велосипеда вокруг горизонтальной оси, укрепленной на нижней перекладине рамы, и снабженного рукоятками управления в верхней части, а нижним концом кинематически, например, через карданный подвес и цепную передачу, подсоединенного к вилке переднего колеса, при этом огибающий ролик замкнутой гибкой связи установлен на горизонтальной оси, укрепленной на передней части рамы, например, на втулке под вилку переднего колеса, с возможностью вращения в продольной плоскости велосипеда, причем рычаг ножного привода, скреплен с одной веткой замкнутой гибкой связи, содержащей цепь Галя и трос, перекинутый через огибающий ролик, на первую муфту свободного хода, с другой веткой которой скреплен рычаг ручного привода, при этом места крепления гибкой связи с рычагами ножного и ручного приводов подсоединены к противоположным ветвям второй гибкой связи на вторую муфту свободного хода через тросы и вторую цепь Галя.
Кроме того, для сокращения продольных размеров при транспортировке велосипеда, он может быть выполнен в варианте, где рама его выполнена из двух частей, передней и задней, при этом передняя часть рамы, вместе с передним колесом установлена с возможностью поворота вокруг оси рычага ручного привода по часовой стрелке от рабочего положения до упора переднего колеса в вал с муфтами свободного хода, а верхняя перекладина передней части рамы установлена с возможностью поворота на оси ролика против часовой стрелки от рабочего положения до упора в нижнюю перекладину, при этом свободный конец верхней перекладины передней части рамы снабжен узлом опоры на заднюю часть, например, в виде соответствующего выступа под вырез в задней части рамы.
Отличительными особенностями предложенной конструкции являются:
выполнение ножного привода в виде рычага, установленного одним концом на верхней перекладине рамы с возможностью качания вокруг горизонтальной оси в продольной плоскости велосипеда, и снабженного опорами для ног велосипедиста на другом конце,
введение в конструкцию ручного привода в виде рычага, установленного в трубчатой направляющей, нижний конец которой размещен с возможностью качания в продольной плоскости велосипеда вокруг горизонтальной оси, закрепленной на нижней перекладине рамы и снабженного рукоятками управления в верхней части, а нижним концом кинематически, например, через карданный подвес и цепную передачу, подсоединенного к вилке переднего колеса.
установка огибающего ролика замкнутой гибкой связи на передней части рамы, например, на втулке под вилку переднего колеса, с возможностью вращения на горизонтальной оси в продольной плоскости велосипеда,
новое конструктивное оформление гибких связей в приводе, где рычаг ножного привода, скреплен с одной веткой замкнутой гибкой связи на первую муфту свободного хода, содержащей первую цепь Галя и трос, перекинутый через огибающий ролик, с другой веткой которой скреплен рычаг ручного привода, при этом места крепления гибкой связи с рычагами ножного и ручного приводов подсоединены к противоположным ветвям второй гибкой связи на вторую муфту свободного хода через тросы и вторую цепь Галя.
Отличительными признаками в варианте разборного велосипеда являются: выполнение рамы из двух частей, передней и задней, при этом передняя часть рамы вместе 2 передним колесом установлена с возможностью поворота вокруг оси рычага ручного привода по часовой стрелке от рабочего положения до упора переднего колеса в вал с муфтам свободного хода, а верхняя перекладина передней части рамы установлена с возможностью поворота против часовой стрелки от рабочего положения на оси ролика до упора в нижнюю перекладину, при этом свободный конец верхней перекладины передней части рамы снабжен узлом опоры на заднюю часть, например, в виде соответствующего выступа под вырез в задней части рамы.
По мнению автора, вышеуказанные отличительные особенности в критерию уровня изобретательского творчества, т.к. несмотря на общеизвестность рычажных приводов с гибкой связью (например, в прототипе), в известных конструкциях велосипедов по сравнению с предложенной не удалось достичь такого уровня использования физических возможностей человека, что удалось достигнуть за счет нового выполнения и компоновки узлов для реализации движения гребца, за счет передачи движения туловища и рук через ручной привод, а движение ног через ножной, и благодаря соответствующей синхронизации этих движений, осуществленной новой общей гибкой связью.
Особенность конструкции возможность осуществлять передачу движения на колесе и при обратном, подготовительном ходе ручным рычагом вперед, ножным назад, хотя данная фаза по энергоотдаче, естественно, существенно уступает первой (у гребца вторая фаза является холостым ходом), однако характерным является рост усилий всех мышц при второй фазе по мере эксплуатации велосипеда вследствие развития мышц, участвующих в движении.
Интересна и компоновка велосипеда в трансформируемом варианте, где упругая связь несет новую функциональную нагрузку кроме передачи движения - она является еще и элементом силового удержания передней и задней частей рамы, т. к. передняя часть в данном варианте как бы оперта на заднюю и при наезде на препятствие или лобовом ударе гибкая связь работает как амортизатор удара.
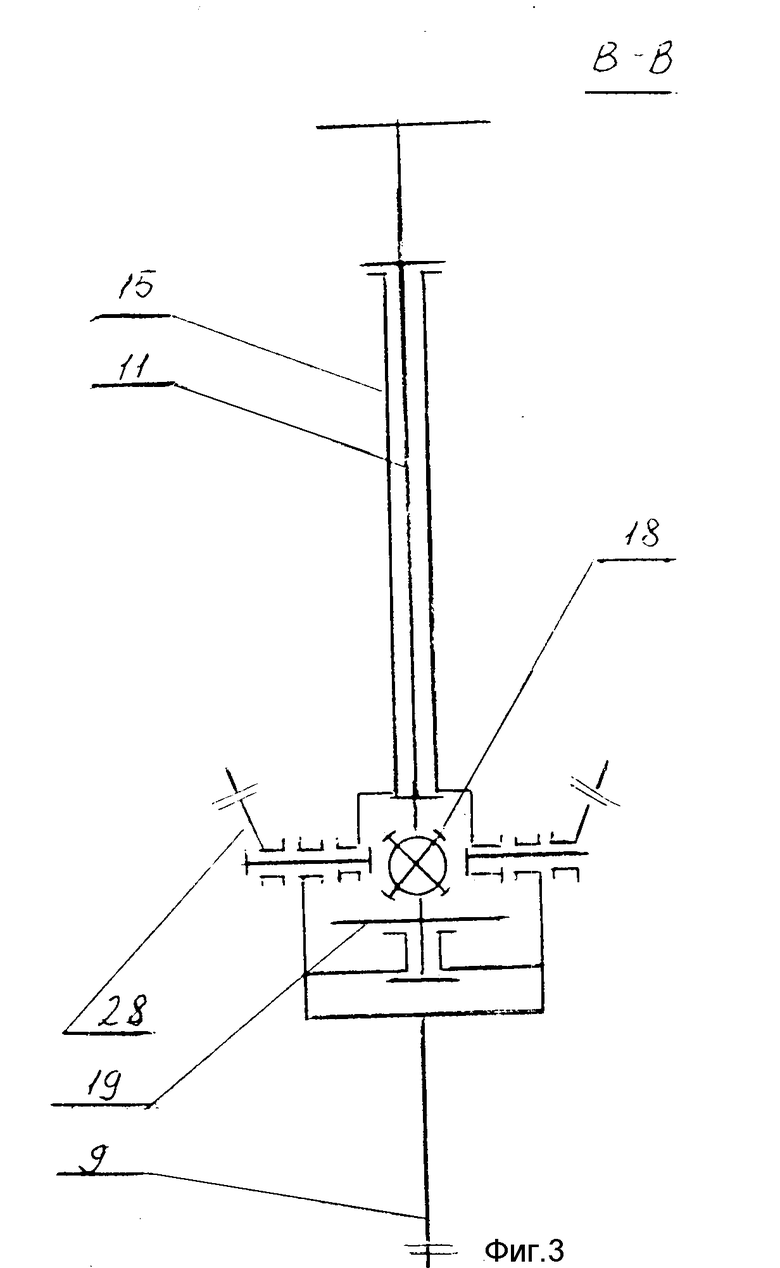
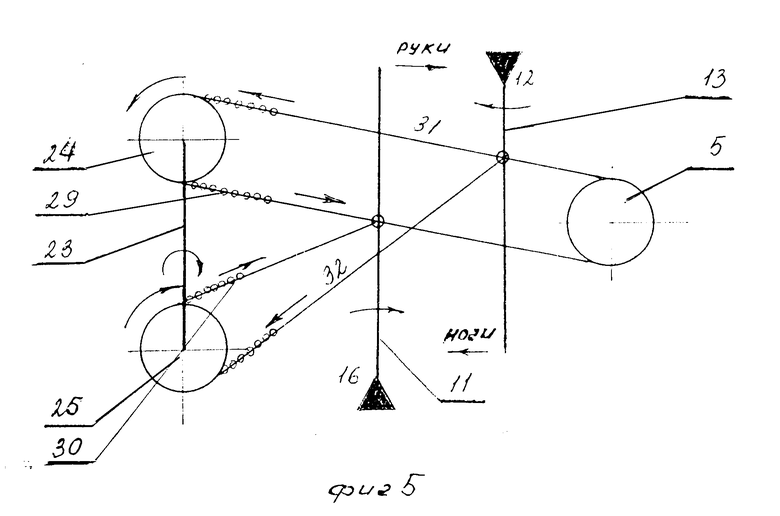
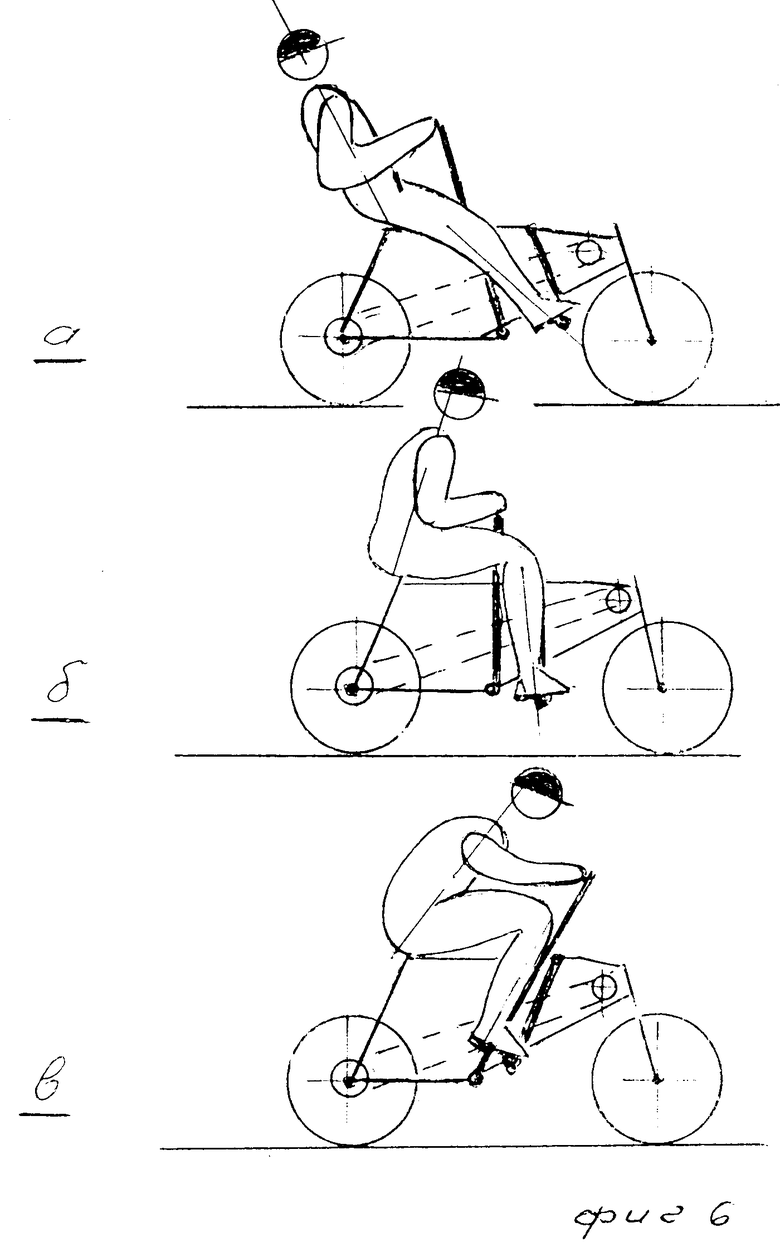
Конструктивная схема предлагаемого трехколесного велосипеда представлена на фиг. 1; на фиг. 2 и фиг. 3 представлены разрезы ручного привода его размещение взаимодействие с карданной передачей и цепной передачей на вилку переднего колеса; на фиг. 4 и фиг. 5 взаимодействие ручного и ножного рычагов с гибкими связями при прямом и обратном гребках велосипедиста; на фиг. 6 фазы движения велосипедиста.
Рама велосипеда состоит из передней 1 и задней 2 частей. Передняя часть включает верхнюю перекладину 3, которая установлена на оси ролика 5, закрепленного на втулке 6 передней вилки 7 с колесом 8.
Нижняя перекладина 9, с одной стороны, скреплена с втулкой 6, с другой стороны, с втулкой 10 качания рычага 11 ручного привода.
На верхней перекладине 3 установлен с возможностью качания в продольной плоскости на горизонтальной оси 12 рычаг 13 ножного привода, на другом конце которого размещены упоры 14 для ног велосипедиста.
Рычаг 11 ручного привода установлен в трубчатой направляющей 15, нижней частью размещенной во втулке 10 на горизонтальной оси 16, перпендикулярной к продольной плоскости велосипеда.
В верхней части рычаг 11 снабжен рукоятками 17 для рук велосипедиста, нижней частью рычаг 11 через карданную передачу 18 и цепную передачу 19 кинематически связан с передней вилкой 7 колеса 8.
На рукоятке 17 установлены рычаги 17а ручных тормозов на переднее и задние колеса (тормозные устройства колодочного типа на схеме не показаны).
Задняя часть рамы представляет собой П-образную поперечину 20, на верхней перекладине 21 которой размещено седло 22, вал 23 с муфтами свободного хода 24, 25 и задними колесами 26 и 27.
Вертикальные балки поперечины 20 через трубы 28 подсоединены к втулке 10 ручного привода.
На звездках муфт свободного хода 24, 25 размещен цепи Галя 29 и 30, которые подсоединены через тросы 31, 32 соответственно к рычагам ручного 11 и ножного 13 приводов, причем рычаг 13 ножного привода, скреплен с верхней веткой привой замкнутой гибкой связи на муфту 24 свободного хода, содержащей цепь Галя 27 и трос 31, перекинутый через огибающий ролик 5, с нижней веткой которого скреплен рычаг 11 ручного привода, при этом места 33, 34 крепления гибкой связи с рычагами 13 и 11 ножного и ручного приводов подсоединены к противоположным ветвям второй гибкой связи на вторую муфту 25 свободного хода через трос 32 и вторую цепь Галя 30.
Работа устройства заключается в следующем.
При езде велосипедист сидит на седле 22, рукам держась за рукоятки 17, и установив ноги на опоры 14 (фиг. 6, поз. 6).
При выполнении основного силового движения движение гребца, реализованного в данной конструкции, велосипедист, упираясь ногами в упоры 14, начинает тянуть рычаг 11 ручного привода на себя, последовательно отклоняя спину назад, т.е. выполняет как бы "гребок" (фиг. 6 поз. а).
В результате усилия рук и корпуса велосипедиста рычаг 11 ручного привода, вращаясь на своей оси 16 начинает перемещать нижнюю ветвь троса 31 гибкой связи влево (фиг. 4).
При этом в результате усилия ног рычаг 13 ножного привода начинает вращаться против часовой стрелки на своей оси 12 и
В результате перемещения рычагов преобразуется в перемещение гибкой связи движение через цепь Галя 29 передается на муфту свободного хода 24 и далее на вал 23, вращение которого передается на ведущие колеса 26, 27.
Одновременно перемещения рычагов 11 и 13 производят передачу движения через вторую гибкую связь на муфту свободного хода 25, которая проскальзывает и не передает движение на вал 23.
При обратном движении рук велосипедиста рычаг 11 ручного привода перемещается вперед (на фиг. 5 вправо), а рычаг 13 ножного привода назад (на фиг. 5 влево).
При этом происходит передача рабочего движения через вторую гибкую связь 32 на вал 23 и колеса 26, 27 через муфту свободного хода 25, в то время как муфта 24 проскальзывает.
Таким образом, осуществляется поочередная передача движения на ведущие колеса и при прямом и при обратном перемещении рычагов ручного 11 и ножного 13 приводов.
Для лучшей передачи усилий ног при обратном движении возможен вариант крепления ноги и педали по типу педали у гонщиков-велосипедистов или используя специальную обувь с втулкой которая при езде на велосипеде одевается на ось на рычаге 14.
Для поворота велосипеда вправо или влево велосипедист поворачивает за рукоятки управления 17 рычаг 11, вращение которого через карданный подвес 18 передается через цепную передачу 17 на переднюю вилку 7 с колесом 8.
Торможение при движении осуществляется посредством ручных тормозов, колодочного типа, приводы 17а которых установлены на переднюю вилку 7 с колесом 8.
Для разборки велосипеда при транспортировке необходимо разъединить замки гибких связей, зафиксировать гибкие связи в прижимах (на фиг. 1 замки и прижимы не показаны) и далее, произвести поворот передней части 1 рамы относительно оси 16 вращения ручного привода до упора переднего колеса 8 в вал 23.
Далее поворачивают верхнюю перекладину 3 против часовой стрелки до упора в нижнюю перекладину 9.
Поперечные габариты велосипеда могут быть уменьшены за счет выполнения рычага 11 ручного привода и вала 23 раздвижными.
В настоящее время автором изготовлен опытный образец велосипеда, испытан с положительным результатом, и проводится работа по промышленному освоению конструкции.
Литература.
1. Моделист-конструктор 1990, N 1.
2. А.с. N 15622166, кл. B 62 K 5/02, 1990.
3. А.с. N 1754561, кл. B 62 K 5/02, 1992.
4. А.с. N 171281, кл. A 61 5/02, 1991.
5. Моделист-конструктор 1987, N 5.
6. А.с. N 1299891, кл. B 62 K 5/02, 1987.
7. А.с. N 5272928, кл. B 62 H 1/12, 1993.
| название | год | авторы | номер документа |
|---|---|---|---|
| Велосипед | 1982 |
|
SU1049328A1 |
| Привод транспортного средства, приводимого в действие мускульной силой человека | 1986 |
|
SU1505832A1 |
| Велосипед | 1985 |
|
SU1350079A1 |
| ТАНДЕМ А.Г. ДВОРЯНИДОВА | 2003 |
|
RU2247051C1 |
| БЕЗМОТОРНОЕ СРЕДСТВО ПЕРЕДВИЖЕНИЯ НА МУСКУЛЬНОЙ СИЛЕ ЧЕЛОВЕКА, ИСПОЛЬЗУЮЩЕЕ ОБРАЩЁННЫЙ ПРИНЦИП РАБОТЫ ТЕЛА ПРИ АКАДЕМИЧЕСКОЙ ГРЕБЛЕ, ДЛЯ ИСПОЛЬЗОВАНИЯ В КАЧЕСТВЕ ЛЕГКОГО ТРАНСПОРТНОГО СРЕДСТВА, ДЛЯ ТУРИЗМА, СПОРТА | 2015 |
|
RU2613134C2 |
| САМОПЕД | 2007 |
|
RU2373099C2 |
| Велосипед | 1984 |
|
SU1155492A2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1998 |
|
RU2131820C1 |
| ВЕЛОСИПЕД С ЭРГОНОМИЧНЫМИ ПОСАДКОЙ И ПЕДАЛИРОВАНИЕМ | 2019 |
|
RU2724027C1 |
| Возвратно-поступательный ножной привод для велосипеда | 2022 |
|
RU2780873C1 |


Использование изобретения относится к области транспорта, а именно, к транспортным средствам, приводимым в движение мускульной силой человека, преимущественно к трехколесным велосипедам. Сущность изобретения в том, что в двух рычажных, синхронизированных, между собой механизмов - ножного и ручного, передача усилий от которых на ведущие колеса осуществлена через гибкую связь с муфтами свободного хода. Конструкция трехколесного велосипеда позволила существенно повысить процент использования физической силы человека на движение велосипеда практически не усложнив конструкции трехколесного велосипеда по сравнению с известным. Интересны варианты использования предложенного привода в водных средствах с приводом от мускульной силы человека, в тренажерах и на колесном транспорте, вариант велосипеда с уменьшенными габаритами. 1 з.п. ф-лы, 6 ил.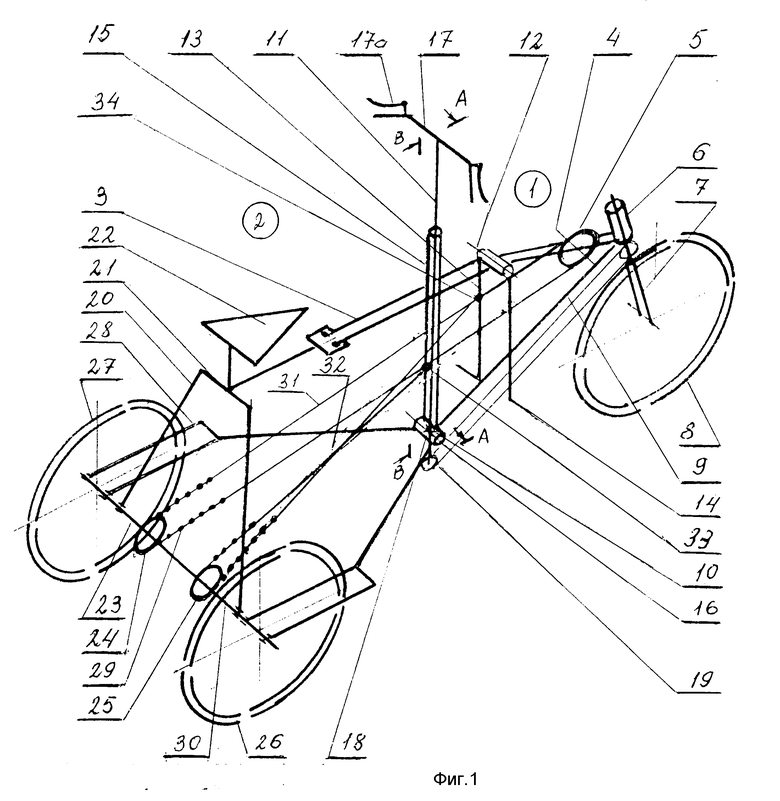
| US, патент, 5272928, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
