Изобретение относится к транспортным средствам, приводимых в движение мускульной силой.
Известен самокат (патент RU 2009941, В62М 1/10, 1994), приводимый в движение мускульной силой, содержащий основание, переднее колесо, ведущее заднее колесо, трансмиссию с обгонными механизмами, опорные площадки для ног, ролики для движения по основанию.
Основными недостатками, указанного самоката являются: 1) достаточно большой вес самоката из-за массивного основания; 2) низкий коэффициент преобразования мышечной энергии в энергию движения. Движение самоката осуществляется путем толкания ногами опорных площадок, в результате возникает реакция, которая должна компенсироваться мышцами рук, а это дополнительная нагрузка на человека, что приводит к снижению КПД, преобразования мышечной энергии в энергию движения.
Известны «Транспортное средства с приводом мускульной силой человека» (патенты RU 2160681, 2160682, 2160683, В62М 1/04, 2000 г.). Транспортное средство по патенту RU 2160681 содержит раму, установленные на ней руль с рулевой вилкой, переднее колесо, ведущие задние колеса, установленные на приводной оси с парой обгонных муфт, пару приводных рычагов, пару гибких тяг, промежуточный шкив и дополнительную обгонную муфту.
Основными недостатками данного транспортного средства являются: 1) при движении накатом приводные рычаги с платформами уходят в нижнее положение и устанавливаются в наклонном положении, в результате носки стоп ног приподнимаются, что создает неудобное состояние для ног и одновременно соскальзывающий момент; 2) крепление гибкой тяги к приводному рычагу близко к его середине, что уменьшает длину пробега транспортного средства по сравнению с тем, если бы крепление гибкой тяги было перенесено на торец рычага; 3) высокая посадка увеличивает шанс падения и получения травмы; 4) посадка человека осуществляется переносом ноги через высоко установленную раму, что уменьшает его использование людьми пожилого возраста и детьми; 5) сложность конструкции, связанной со спутыванием троса при перемещении транспортного средства задним ходом. В предлагаемом самопеде задний ход возможен только тогда, когда человек, стоя на земле, будет его передвигать в заднем направлении. В этом случае во всех вариантах самопеда сдвиг ведущего колеса в заднем направлении заклинивает обгонные муфты, которые сильнее натягивают тросы, но поскольку приводные рычаги подняты и упираются в регулятор высоты подъема, то колеса просто перестают вращаться. Сдвинуть самопед задним ходом, в этом случае, возможно только методом проскальзывания заднего колеса или просто поднятия и его переноски. Имея малые габариты, вес и высокую маневренность самопеду задний ход не нужен.
Известен велосипед (патент US 1258391 А, 05.03.1918, Class: 280/251), взятый за прототип, содержащий раму, соединенную с ней рулевую вилку с рулем, установленной на ней стойкой со шкивами, переднее колесо, ведущее заднее колесо, установленное на приводной оси с парой храповых механизмов, пару приводных рычагов, каждый из которых передним своим концом шарнирно установлен на раме и имеет платформу, пару гибких тяг, каждая из которых прикреплена одним концом к приводному рычагу, другим концом, охватывая шкив, закреплена на храповом механизме.
Основным недостатком данного велосипеда является: 1) слабая спиральная пружина (17-17'), установленная на задней оси и соединенная с храповым механизмом, которая не имеет корпуса и навита из круглой проволоки. Недостатком таких пружин является то, что при натяжении она спутывается, т.е. внешние витки смещаются, приближаются к оси, пересекаясь и вклиниваясь между внутренними витками. Как правило, такие пружины выполняются из пластинчатого материала прямоугольного сечения, что не приводит к эффекту вклинивания и соответственно спутывания. Такие пружины не обладают большим усилием и КПД, а в указанном велосипеде необходимо возвращать в исходное состояние не только храповое колесо, но и поднимать приводные рычаги, что невозможно; 2) используется храповой механизм, храповое колесо которого создает дополнительное трение и низкочастотный шум.
Сущность изобретения заключается в том, что самопед, содержащий раму, соединенную с ним рулевую вилку с рулем, установленной на ней стойкой со шкивами, переднее колесо, ведущее заднее колесо, установленное на приводной оси с парой храповых механизмов, пару приводных рычагов, каждый из которых передним своим концом шарнирно установлен на раме и имеет платформу, пару гибких тяг, каждая из которых прикреплена одним концом к приводному рычагу, другим концом, охватывая шкив, закреплена на храповом механизме, он снабжен возвратными пружинами, установленными на шарнирах приводных рычагов и обгонными муфтами, заменяющих храповые механизмы.
Кроме того, самопед снабжен двумя криволинейными желобами, соединенными с рамой, с установленными в них роликами, шатунами, соединенными одним концом с приводными рычагами, а вторым концом с роликами и гибкой тягой.
Кроме того, по любому из пунктов платформы имеют регулируемую базу.
Применение в самопеде возвратных пружин и обгонных муфт позволит увеличить его КПД и работоспособность. Применение криволинейного желоба с роликами и шатунами позволит соединить гибкие тяги со свободными концами шатунов. Тем самым возникла возможность убрать высокую стойку и обезопасить седока во время посадки и высадки, особенно детей.
Передний упор 11 платформы имеет возможность переустановки (перемещения) для подгонки под ступню взрослого человека или ребенка (регулируемая база).
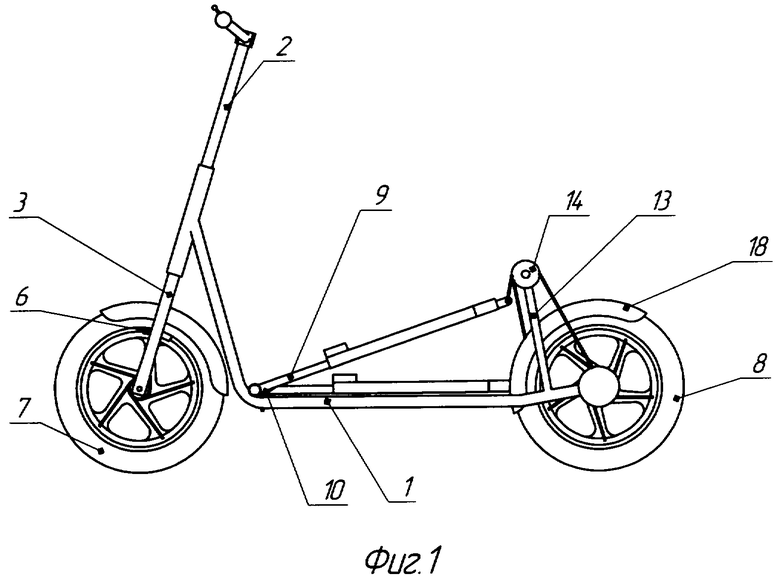
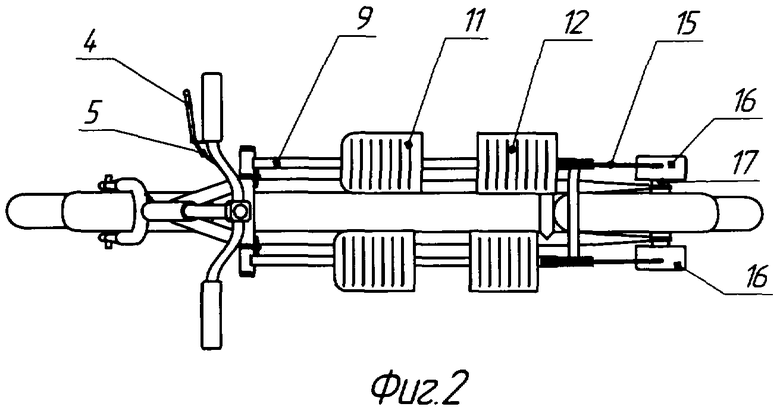
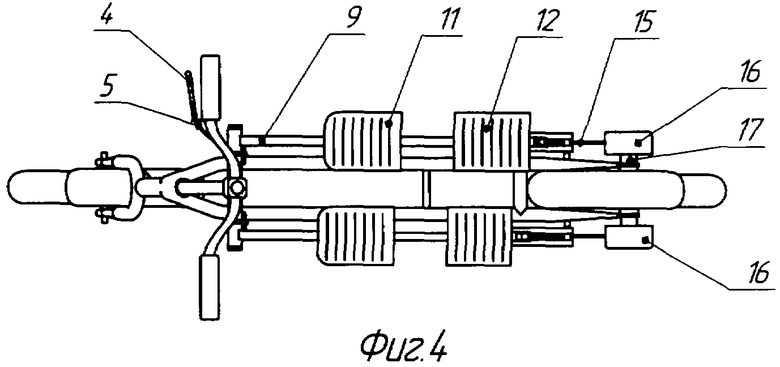
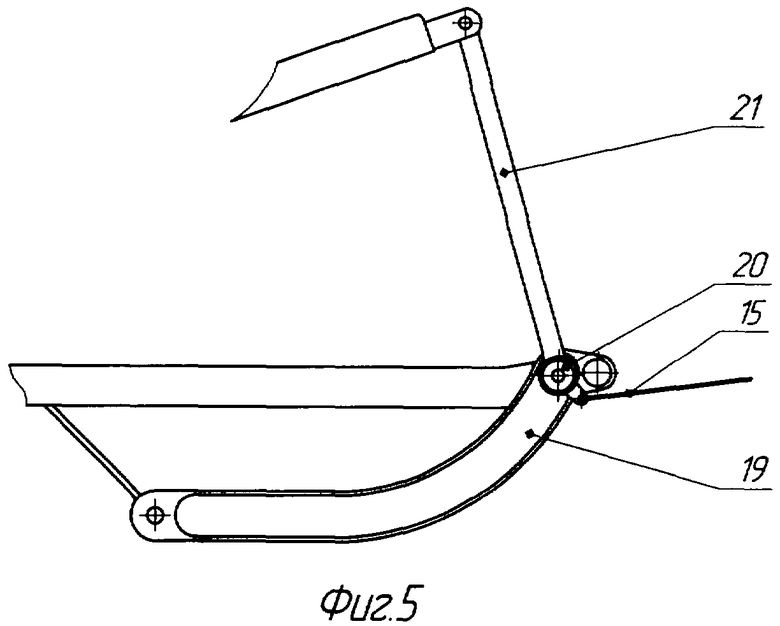
На фиг.1 представлен вариант самопеда со стойкой и шкивами; на фиг.2 - вид сверху фиг.1; на фиг.3 - вариант с желобами, шатунами и роликами; на фиг.4 - вид сверху фиг.3; на фиг.5 представлен одиночный узел шатунного механизма.
Самопед состоит из рамы 1, установленной на ней руля 2 с рулевой вилкой 3, ручным тормозом, состоящим из рукояти 4, троса 5, колодок 6, переднего колеса 7, ведущего заднего колеса 8, пары приводных рычагов 9 с возвратными пружинами 10, каждый из которых снабжен регулируемой платформой с передним 11 и задним упорами 12, стойки 13, на которой установлены шкивы 14, через которые перекинуты гибкие тяги 15, связывающие торцы приводных рычагов 9 с обгонными муфтами 16, с пружинами кручения (не показаны), напрессованными на ось 17, защиты 18.
В варианте с шатунными механизмами самопед содержит два желоба 19, в которых установлены ролики 20, соединенные с шатунами 21 и гибкой тягой (тросом) 15, причем коромыслом в шатунном механизме служит приводной рычаг 9.
По этим же схемам может изготавливаться трехколесный вариант самопеда. В этом случае ведущими будут оба задних колеса.
Движение на самопеде осуществляется следующим образом. Удерживая руль 2 руками, левая нога ставится на левую платформу 11, 12 рычага 9, затем, оттолкнувшись правой ногой от земли, переносим вес тела на левую ногу, правую ногу ставим на правую платформу. Под весом тела левый рычаг опускается вниз. В это время гибкая тяга (трос) 15 через шкив 14, разматываясь с обоймы - шкива обгонной муфты 16, заклинивает ось 17 и приводит ее во вращение вместе с колесами 7, 8. Самопед перемещается на определенное расстояние. Переносим вес тела на правую ногу, выпрямляя ее в колене. В этой ситуации заклиниваются ролики правой обгонной муфты, движение самопеда продолжится. В момент переступывания ног левый рычаг поднимается вверх за счет пружины 10, трос 15 под действием пружины обгонной муфты наматывается на шкив - обойму обгонной муфты 16, данная муфта получает обгон. Ход рычагов 9 вверх ограничивается регулятором высоты подъема рычагов (не показан). В любой момент, на любой высоте можно остановить переступывание, обе обгонные муфты получат обгон, и самопед продолжит движение по инерции. В любой момент, на любой высоте, создав давление на платформу, можно увеличить скорость движения. Для остановки самопеда необходимо нажать на рукоять 4, произойдет торможение колеса и остановка самопеда.
По описанной технологии движение осуществляется и на трехколесном самопеде.
По сравнению с аналогами и прототипом самопед позволяет повысить КПД использования энергии человека при достаточно высокой скорости передвижения.
В самопеде желательно применение телескопического руля, который устанавливается на оптимальной высоте при езде и складывается при транспортировке и его переноске.
Самопед, как транспортное средство, занимает свободную нишу между самокатом и велосипедом [САМО(кат) и (велоси)ПЕД] или самокат педальный. Обладая качествами самоката - низкая посадка, высокая маневренность и качествами велосипеда - передача крутящего момента ведущему заднему колесу через перемещение платформ - педалей, самопед предоставляет новые возможности человеку для передвижения на пространственной поверхности земли. Вертикально-поступательное перемещение платформ позволяет максимально использовать вес человека путем элементарного переступывания ногами для его передвижения. Трансформация мышечной энергии ног человека с максимальным использованием силы тяжести человека в крутящий момент колес говорит о высоком КПД данного устройства. Стоячая поза при передвижении вкупе с низкой посадкой позволит использовать самопед всеми возрастными категориями людей. Самопед имеет простую конструкцию, небольшие габариты, вес и высокую маневренность, что дает ему преимущества передвижения в ограниченном пространстве, например движение по тротуарам, выставочным павильонам, цехам предприятий и т.п. Самопед прост в изготовлении, имеет низкую себестоимость, что делает его доступным массовому покупателю. Самопеду не требуется парковочное место, он легко переносится вручную.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2392166C1 |
| САМОКАТ | 2016 |
|
RU2658234C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ПРИВОДОМ МУСКУЛЬНОЙ СИЛОЙ ЧЕЛОВЕКА | 2000 |
|
RU2160682C1 |
| САМОКАТ | 2006 |
|
RU2329911C2 |
| САМОКАТ | 2012 |
|
RU2520634C1 |
| САМОКАТ ГОРЛОВА | 1997 |
|
RU2131821C1 |
| Индивидуальное транспортное средство | 2016 |
|
RU2656802C2 |
| ЛЕГКОВОЙ ВЕЛОМОБИЛЬ, ПРИВОДИМЫЙ В ДВИЖЕНИЕ МУСКУЛЬНОЙ СИЛОЙ НОГ, СПИНЫ, РУК, ВЕСОМ ВОДИТЕЛЯ И ГРУЗА | 1996 |
|
RU2124450C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ПРИВОДОМ МУСКУЛЬНОЙ СИЛОЙ ЧЕЛОВЕКА | 2000 |
|
RU2160683C1 |
| ВЕЛОСИПЕД (ВАРИАНТЫ), КОЛЕСО ВЕЛОСИПЕДА, ПРИВОД ВЕЛОСИПЕДА, РЫЧАЖНЫЙ МЕХАНИЗМ ВЕЛОСИПЕДА, ПЕДАЛЬНЫЙ МЕХАНИЗМ ВЕЛОСИПЕДА И КОМПЛЕКТ, СОДЕРЖАЩИЙ ВЕЛОСИПЕД И ПРИЦЕП | 2007 |
|
RU2373101C2 |
Изобретение относится к двухколесным транспортным средствам без сиденья, приводимым в движение ножными рычагами. Самокат педальный содержит раму (1), рулевую вилку (3) с рулем (2), переднее колесо (7), ведущее заднее колесо (8), установленное на приводной оси с парой обгонных муфт. Приводные рычаги (9) шарнирно установлены на раме (1) посредством своих передних концов и имеют платформы для ног. Самокат педальный снабжен желобами (19) с установленными в них роликами и шатунами (21), которые соединены одним концом с роликами и гибкими тягами, а другим концом - с приводными рычагами (9). Приводные рычаги (9) могут быть снабжены возвратными пружинами, расположенными, например, на шарнирах приводных рычагов (9). Платформы приводных рычагов (9) могут иметь регулируемую базу для подгонки под ступню взрослого человека или ребенка. Решение направлено на снижение высоты посредством исключения известной из уровня техники стойки со шкивом на задней части рамы. 2 з.п. ф-лы, 5 ил.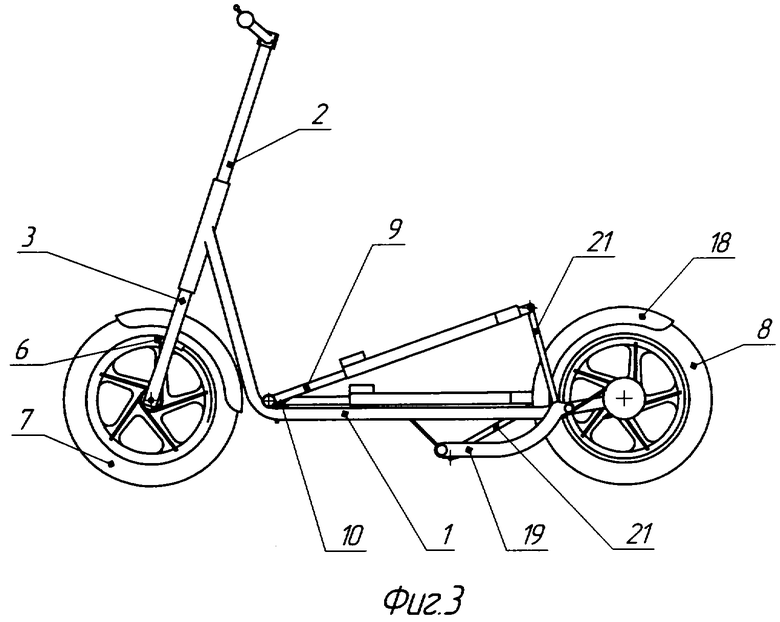
1. Самокат педальный, содержащий раму, соединенную с ней рулевую вилку с рулем, переднее колесо, ведущее заднее колесо, установленное на приводной оси с парой обгонных муфт, пару приводных рычагов, каждый из которых передним своим концом шарнирно установлен на раме и имеет платформу, пару гибких тяг, каждая из которых закреплена одним концом на обгонной муфте, отличающийся тем, что он снабжен желобами с установленными в них роликами и шатунами, соединенными одним концом с приводными рычагами, а вторым концом с роликами и гибкими тягами.
2. Самокат педальный по п.1, отличающийся тем, что он снабжен возвратными пружинами приводных рычагов.
3. Самокат педальный по любому из пп.1 и 2, отличающийся тем, что платформы имеют регулируемую базу.
| Способ хирургического лечения дуоденостаза | 1985 |
|
SU1258391A1 |
| Артоболевский И.И | |||
| Механизмы, т.1 | |||
| - M.: Издательство Академии наук СССР, с.222, механизм 205 | |||
| Смазочный поршневой насос | 1934 |
|
SU44098A1 |
| Газоимпульсная головка | 1989 |
|
SU1653889A1 |
| Устройство для перегрузки грузов | 1988 |
|
SU1574516A1 |

