Изобретение относится к морской технике, в частности к подводным аппаратам, несущим приборы для обследования грунта и толщи воды, поиска затонувших устройств, обследования подводных трубопроводов, геологических и экологических исследований, замеров различных физических полей вблизи грунта и т.п.
Известен подводный буксируемый аппарат переменной глубины, заглубляемый за счет своей отрицательной плавучести (см. Простаков А.Л. Гидроакустика и корабль. Л. Судостроение, 1967, с. 26 28, рис. 6), содержащий водоизмещающий контейнер-обтекатель (корпус), в средней верхней части которого расположен узел для крепления гибкой связи и двухкилевое оперение.
Однако, вследствие того, что корпус аппарата выполнен водоизмещающим (объемным), аппарат обладает большим гидродинамическим сопротивлением и сопротивлением присоединенной массы воды при вертикальных перемещениях, вызванных качкой судна-буксировщика, что приводит к значительным пульсациям натяжения гибкой связи.
Для предотвращения прослаблений и захлестывания гибкой связи, опасных для ее прочности, такому аппарату необходимо придавать значительную отрицательную плавучесть (массу) и тем большую, чем выше требуемая для эксплуатации аппарата максимальная степень волнения моря.
Другим недостатком прототипа является отсутствие органа управления гидродинамическими характеристиками, который наряду с балансировкой аппарата в потоке обеспечивал бы возможность минимизации его угловых колебаний непосредственно в процессе натурной отработки хода в морских условиях. Это приводит к необходимости проведения предварительной длительной и дорогостоящей модельной отработки гидродинамической компоновки аппарата.
Задача изобретения состоит в создании подводного буксируемого аппарата, позволяющего повысить стабильность хода по дифференту и крену, снизить динамические нагрузки на гибкую связь при вертикальных колебаниях аппарата, вызванных качкой судна-буксировщика, с одновременным расширением диапазона скоростей буксировки в сторону малых скоростей, а затем снизить массу аппарата и обеспечить настройку его хода в натурных условиях.
Поставленная задача решается тем, что в подводном буксируемом аппарате, содержащем корпус, в средней части которого расположен узел для крепления гибкой связи, а хвостовое оперение выполнено двухкилевым, корпус выполнен удлиненным из двух плоских бортовых пластин, соединенных между собой носовой, средней и кормовой коробками, частично перекрывающими сквозной проем между пластинами, при этом вертикальные кили хвостового оперения являются продолжением бортовых пластин и расположены сверху корпуса, а горизонтальные лопасти хвостового оперения выступают из нижней части кормовой коробки и снабжены дополнительными выдвижными плоскостями, причем на горизонтальных лопастях, вертикальных килях и задней кромке кормовой коробки установлены интерцепторы.
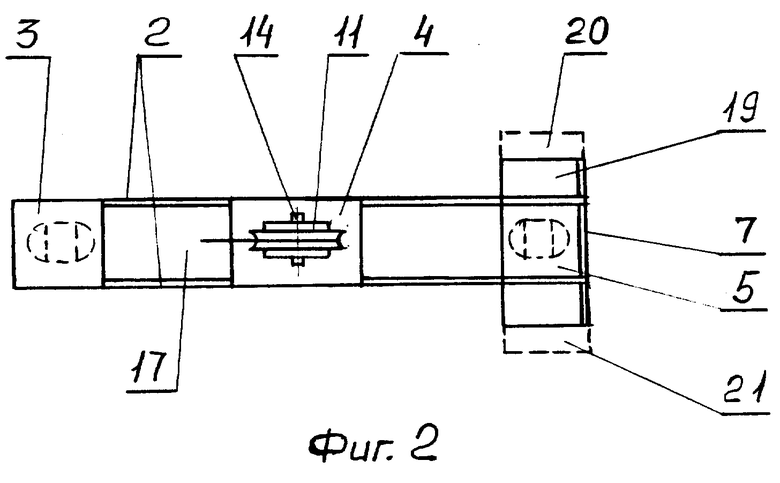
На фиг.1 изображен подводный буксируемый аппарат, вид сбоку; на фиг. 2 - вид аппарата сверху; на фиг.3 вид аппарата спереди; на фиг.4 представлена схема действия внешних сил на подводный аппарат.
Подводный аппарат (фиг. 1, 2, 3) содержит удлиненный корпус 1, выполненный из двух плоских бортовых пластин 2, соединенных между собой носовой 3, средней 4 и кормовой 5 коробками. Носовая коробка 3 выполнена со скругленным носком 6, кормовая коробка 5 выполнена с плоским кормовым срезом 7. Внутри коробок 3, 4, 5 размещены измерительные элементы 8, 9 и блок электронной аппаратуры 10. Сверху средней коробки 4 размещен узел для крепления 11 гибкой связи 12 в виде блока 13, свободно вращающегося на оси 14, закрепленной между кронштейнами 15. Гибкая связь 12 охватывает блок 13 и закреплена кабельным зажимом 16. Свободный конец гибкой связи 12 введен в гермоотсек электронного блока 10.
Узел для крепления 11 размещен таким образом, что точка буксировки "0" (ось блока 13) расположена в середине корпуса 1, над и на одной вертикали с центром отрицательной плавучести аппарата Cоп. Сквозной проем 17 между носовой 3 и кормовой 5 коробками частично перекрыт средней коробкой 4. В кормовой части аппарата имеется оперение, которое состоит из двух вертикальных килей 18 и двух горизонтальных лопастей малого удлинения 19. Вертикальные кили расположены сверху корпуса 1 и каждый из них выполнен как продолжение (лежит в одной плоскости) бортовых пластин 2. Горизонтальные лопасти 19 выступают из нижней части кормовой коробки 5, имеют дополнительные выдвижные плоскости 20 и 21 для минимизации угловых колебаний аппарата, которые выполнены как крылья малого удлинения. Вертикальные кили 18 скреплены между собой цилиндрическими распорками 22. Сверху кормовой коробки 5 у ее кормового среза 7 и на задней кромке горизонтальных лопастей 20 установлены интерцепторы 23 и 24 балансировки дифферента аппарата, а на вертикальных килях 18 установлены интерцепторы 25 балансировки крена. Внутри коробок 3, 4, 5 могут быть установлены балансировочные грузы 26 для регулировки положения центра отрицательной плавучести Cоп и ее величины.
Аппарат работает следующим образом.
При буксировке, в отсутствии качки судна, на подводный аппарат набегает встречный поток с постоянной горизонтальной скоростью V0 (фиг.4). Возникающий при этом постоянный кабрирующий момент  силы лобового сопротивления аппарата Xk относительно поперечной оси OZ, проходящей через точку буксировки "O", компенсируется балансировочным моментом, создаваемым горизонтальными интерцепторами 23 и 24. В случае строительной несимметрии корпуса аппарата возникают постоянные моменты гидродинамической несимметрии
силы лобового сопротивления аппарата Xk относительно поперечной оси OZ, проходящей через точку буксировки "O", компенсируется балансировочным моментом, создаваемым горизонтальными интерцепторами 23 и 24. В случае строительной несимметрии корпуса аппарата возникают постоянные моменты гидродинамической несимметрии  , которые вызывают кренение аппарата.
, которые вызывают кренение аппарата.
Компенсация этих моментов и выправление крена обеспечивается настройкой вертикальных интерцепторов 26, которые могут иметь различную длину и устанавливаться с разных сторон и на разной высоте на вертикальных килях 18.
При небольших случайных отклонениях аппарата по дифференту и крену возникают восстанавливающие моменты относительно осей O и OX силы отрицательной плавучести P, приложенной в центре Cоп, лежащей ниже точки буксировки "O" и на одной вертикальной оси OY с ней. При небольших отклонениях аппарата по курсу за счет вертикальных килей 18 возникает восстанавливающий флюгирующий гидродинамический момент относительно вертикальной оси OY. Тем самым обеспечивается статическая устойчивость хода буксируемого аппарата.
В условиях волнения моря и качки судна-буксировщика возмущения, распространяющиеся вдоль гибкой связи 12 от судна к аппарату, достигают последнего и вызывают периодические перемещения точки буксировки "O" преимущественно в направлении силы T (практически по вертикали).
Линейные колебания точки "O" со скоростью Vk в свою очередь вызывают угловые колебания аппарата по дифференту и крену, как следствие динамических составляющих моментов  , а также пульсации натяжения ΔT гибкой связи 12, как следствие переменной гидродинамической нагрузки на аппарат.
, а также пульсации натяжения ΔT гибкой связи 12, как следствие переменной гидродинамической нагрузки на аппарат.
Из теории подводных буксируемых аппаратов и практики их морской отработки известно, что при одинаковых условиях качки судна-буксировщика угловые колебания аппарата будут тем больше, чем больше величины производной восстанавливающего момента dMz/dα по углу атаки аппарата a, площади горизонтальной проекции аппарата Г и смещенный по длине аппарата относительно точки буксировки "O" центров массы аппарата и присоединенных масс жидкости.
Угловые колебания будут убывать с понижением центра отрицательной плавучести Cоп относительно точки буксировки "O" с ростом отрицательной плавучести P и ростом момента гидродинамического демпфирования угловых колебаний  скорость угловых колебаний/.
скорость угловых колебаний/.
Пульсации натяжения гибкой связи T убывает, если уменьшать площадь горизонтальной проекции аппарата Fгп; коэффициент гидродинамического вертикальным колебаниям  ; массу аппарата M.
; массу аппарата M.
Вследствие выполнения корпуса 1 аппарата из двух плоских бортовых пластин 2, соединенных между собой носовой 3, средней 4 и кормовой 5 коробками, частично перекрывающими сквозной проем между пластинами, уменьшаются площадь горизонтальной проекции аппарата Fтп; коэффициент гидродинамического сопротивления вертикальным колебаниям  ; смещения по длине аппарата относительно точки буксировки "O" центров массы и присоединенных масс жидкости и возрастает гидродинамическое демпфирование угловых колебаний
; смещения по длине аппарата относительно точки буксировки "O" центров массы и присоединенных масс жидкости и возрастает гидродинамическое демпфирование угловых колебаний  по сравнению с аппаратом равных габаритов, массы и отрицательной плавучести, но имеющим обычный водоизмещающий корпус.
по сравнению с аппаратом равных габаритов, массы и отрицательной плавучести, но имеющим обычный водоизмещающий корпус.
Одновременно с помощью горизонтальных лопастей хвостового оперения 19, которые выступают из нижней части кормовой коробки 5 и снабжены дополнительными выдвижными плоскостями 20 и 21, можно добиться практически нулевого значения производной восстанавливающего гидравлического момента ,
,
Это обеспечивается за счет регулировки (подбора) выдвижения плоскостей 20 и 21 непосредственно в ходе морских испытаний аппарата, добиваясь минимизации угловых колебаний по дифференту в условиях воздействия качки судна-буксировщика.
Одновременно за счет несимметрии выдвижения плоскостей 20 и 21 может быть скомпенсирована динамическая составляющая кренящего момента  При этом площадь выдвигаемых плоскостей 20 и 21 составляет не более 30% от площади горизонтальных лопастей 19.
При этом площадь выдвигаемых плоскостей 20 и 21 составляет не более 30% от площади горизонтальных лопастей 19.
Выполнение горизонтальных лопастей 19 в виде крыльев малого удлинения (порядка 1) создает условия их безотрывного обтекания при углах атаки, вызванных вертикальной качкой аппарата ,
,
в пределах ±35o, что обеспечивает сохранение настройки dMZ/dα ≈ 0 в широком диапазоне величины волнения моря. Тем самым удается улучшить стабильность хода аппарата и снизить динамические усилия на гибкую связь при воздействии качки судна-буксировщика на малых скоростях буксировки по сравнению с другими аппаратамми.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНЫЙ БУКСИРУЕМЫЙ АППАРАТ | 1990 |
|
RU2096245C1 |
| СПОСОБ УПРАВЛЕНИЯ ДИФФЕРЕНТОМ БУКСИРУЕМОГО ПОДВОДНОГО ОБЪЕКТА | 2017 |
|
RU2657701C1 |
| БУКСИРУЕМЫЙ НОСИТЕЛЬ ДЛЯ ГИДРОНАВТОВ | 1993 |
|
RU2070130C1 |
| БУКСИРУЕМАЯ ЛИНИЯ | 2007 |
|
RU2361773C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| ОПУСКНОЕ ПОДВОДНОЕ УСТРОЙСТВО | 2013 |
|
RU2543118C2 |
| Буксируемый подводный аппарат | 2022 |
|
RU2795071C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| БУКСИРУЕМОЕ ПОДВОДНОЕ УСТРОЙСТВО С ГОРИЗОНТАЛЬНОЙ СТАБИЛИЗАЦИЕЙ | 1999 |
|
RU2148003C1 |


Сущность изобретения: корпус подводного буксируемого аппарата выполнен удлиненным из двух плоских бортовых пластин, соединенных между собой носовой, средней и кормовой коробками, частично перекрывающими сквозной проем между пластинами, при этом вертикальные кили хвостового оперения являются продолжением бортовых пластин и расположены сверху корпуса, а горизонтальные лопасти хвостового оперения выступают из нижней части кормовой коробки и снабжены дополнительными выдвижными плоскостями, причем на горизонтальных лопастях, вертикальных килях и задней кромке кормовой коробки установлены интерцепторы. 4 ил.
Подводный буксируемый аппарат, содержащий корпус, в средней части которого расположен узел для крепления гибкой связи, а хвостовое оперение выполнено двухкилевым, отличающийся тем, что корпус выполнен удлиненным из двух плоских бортовых пластин, соединенных между собой носовой, средней и кормовой коробками, частично перекрывающими сквозной проем между бортовыми пластинами, при этом вертикальные кили хвостового оперения выполнены в виде продолжения бортовых пластин и расположены сверху корпуса, а горизонтальные лопасти хвостового оперения выступают из нижней части кормовой коробки и снабжены выдвижными плоскостями, причем на горизонтальных лопастях, вертикальных килях и задней кромке кормовой коробки установлены интерцепторы.
| Простаков Л.А | |||
| Гидроакустика и корабль | |||
| - Л.: Судостроение, 1967, с | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
