Изобретение относится к области подводной техники, а именно к привязным подводным устройствам, имеющим механическую гибкую связь с судном, в частности к опускным подводным аппаратам, предназначенным для эксплуатации в режиме спуска, подъема и удержания их на определенной глубине при малых скоростях набегающего потока и качке судна-носителя.
На погруженный в подводную среду опускной аппарат воздействует набегающий поток, вызванный движением судна в дрейфе или от морского течения при якорной стоянке судна, а также возмущения от качки судна-носителя, передающиеся через гибкую связь. Это приводит к нарушениям его стабильного положения, к статическим и динамическим угловым отклонениям аппарата.
Распространенным способом стабилизации по углу дифферента привязных устройств различного назначения при воздействии набегающего потока и качки судна-носителя является модификация стабилизирующего оперения путем установки горизонтальных лопастей, рулей или интерцепторов, создающих в набегающем потоке гидродинамический момент, противоположный моменту от лобового сопротивления корпуса (Подводные технологии и средства освоения Мирового океана. - М.: Издательский дом «Оружие и технологии», 2011. - С.34, 59, 97, 377).
Однако этот способ эффективен в основном для стабилизации скоростных привязных аппаратов и в случаях, когда скорости, вызванные возмущениями от качки судна, существенно меньше скорости набегающего потока при буксировке. При этом изменения углов атаки горизонтальных лопастей невелики и остаются в пределах плавного докризисного безотрывного обтекания, обеспечивая устойчивость движения.
В случае малых скоростей набегающего потока, вызванного движением судна в дрейфе или от морского течения при якорной стоянке судна, использование горизонтальных лопастей оперения с целью стабилизации угловых отклонений по дифференту в условиях воздействия интенсивной качки судна может приводить к противоположным результатам. При чрезмерном возрастании амплитуд углов атаки происходят попеременные смены режимов обтекания от плавного безотрывного обтекания к срывному обтеканию горизонтальных лопастей, что вызывает утрату их стабилизирующих свойств. Это явление усугубляется по мере уменьшения скорости набегающего потока и/или возрастания уровня возмущений от качки судна.
Известно опускное подводное устройство, взятое в качестве прототипа, которое имеет корпус отрицательной плавучести, вмещающий гидроакустическую аппаратуру. Сверху корпуса шарнирно закреплен элемент присоединения гибкой связи. Позади корпуса расположено стабилизирующее оперение, имеющее две вертикальные лопасти, установленные с малыми углами наклона относительно продольной оси устройства (Подводные технологии и средства освоения Мирового океана. - М.: Издательский дом «Оружие и технологии», 2011. - С.115).
При воздействии равномерного набегающего потока на корпус указанного подводного устройства возникающая сила лобового сопротивления создает момент относительно оси шарнирного узла элемента присоединения гибкой связи, стремящийся наклонить подводное устройство. Этот момент уравновешивается статическим моментом отрицательной плавучести корпуса при угле дифферента на нос, возрастающим пропорционально квадрату скорости набегающего потока. При возмущениях от качки судна, передающихся через гибкую связь, корпус устройства приобретает дополнительные скорости и ускорения, что приводит к значительным угловым колебаниям, затрудняющим функционирование гидроакустической аппаратуры.
Целью предлагаемого изобретения является улучшение угловой стабилизации опускного подводного устройства, соединенного с надводным судном гибкой связью, в условиях работы при малых скоростях набегающего потока, вызванного движением судна в дрейфе или от морского течения при якорной стоянке судна, а также воздействия качки судна-носителя.
Указанная цель достигается тем, что в опускном подводном устройстве, содержащем корпус отрицательной плавучести, шарнирный узел для элемента присоединения гибкой связи с надводным судном, расположенный в верхней части корпуса, стабилизирующее оперение позади корпуса с лопастями, установленными с малыми углами наклона относительно продольной оси устройства, стабилизирующее оперение дополнено лопастью, горизонтальной по размаху и с хордой, расположенной перпендикулярно продольной оси устройства. Дополнительная лопасть установлена выше шарнирного узла элемента присоединения гибкой связи и отделенно от корпуса. При этом дополнительная лопасть прикреплена к задним кромкам лопастей стабилизирующего оперения. Форма в плане дополнительной лопасти, ее площадь и размещение выбраны из условия уравновешивания гидродинамических моментов корпуса и оперения относительно оси шарнирного узла.
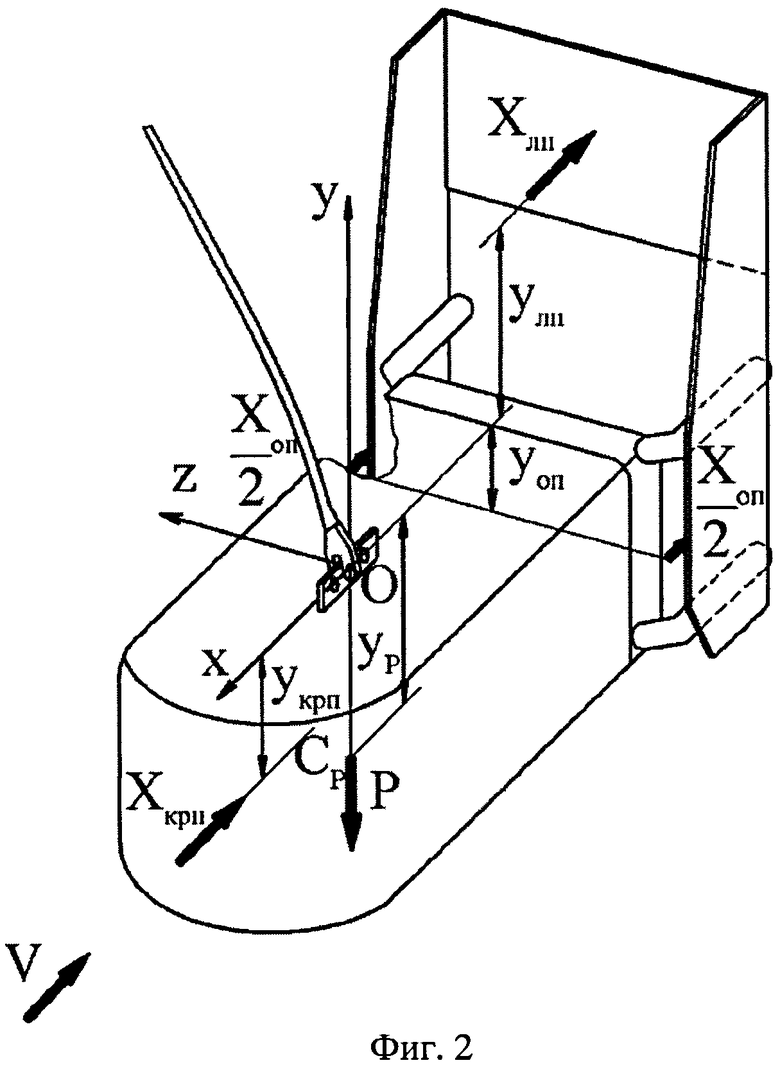
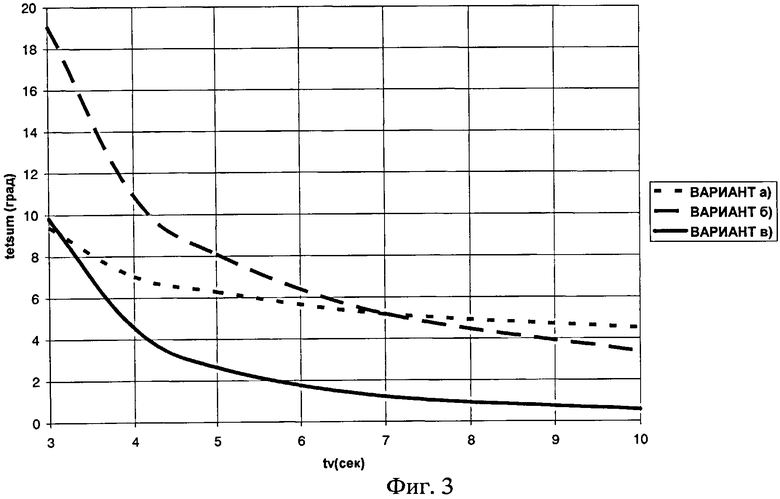
Сущность изобретения поясняется иллюстрациями, где на фиг.1 показано конструктивное выполнение предлагаемого опускного подводного устройства, на фиг.2 представлена схема действия на опускное подводное устройство внешних сил в равномерном потоке, и на фиг.3 представлены зависимости максимальных отклонений опускного подводного устройства по углу дифферента от периодов качки судна при трех вариантах выполнения стабилизирующего оперения.
Опускное подводное устройство содержит корпус 1 отрицательной плавучести, в котором размещены приборы 2 (в зависимости от цели выполняемых работ в корпусе могут быть размещены гидроакустические приборы, магнитометры, теле- и фотоаппаратура, электронная аппаратура и пр.). В верхней части корпуса 1 посредством шарнирного узла 3 закреплен элемент присоединения 4 гибкой связи 5. Позади корпуса 1 на штангах 6 расположено стабилизирующее оперение в виде двух лопастей 7, установленных с малыми углами наклона относительно продольной оси устройства, и дополнительной лопасти 8, горизонтальной по размаху и с хордой, расположенной перпендикулярно продольной оси устройства. Дополнительная лопасть 8 установлена выше шарнирного узла 3 элемента присоединения 4 гибкой связи 5 и отделенно от корпуса 1. Дополнительная лопасть 8 прикреплена к задним кромкам лопастей 7 стабилизирующего оперения.
В случае погружения опускного подводного устройства в равномерный набегающий поток корпус 1 отрицательной плавучести и поперечная дополнительная лопасть 8 стабилизирующего оперения, как плохообтекаемые тела, образуют позади себя области срывного обтекания, при котором определяющую роль в гидродинамической нагрузке имеют силы лобового сопротивления. В соответствие с предложенной гидродинамической компоновкой опускного подводного устройства центр лобового сопротивления корпуса 1 располагается ниже оси шарнирного узла 3, а центр лобового сопротивления дополнительной лопасти 8 выше его. Отделенное расположение дополнительной лопасти 8 от корпуса 1 и ее крепление к задним кромкам лопастей 7 улучшает стабилизацию подводного устройства по курсу. Форма в плане дополнительной лопасти 8, ее площадь и расположение выбираются из условия уравновешивания гидродинамических моментов корпуса 1 и оперения относительно оси шарнирного узла 3.
Схема действия внешних сил на подводное устройство в равномерном потоке и их балансировка показаны на фиг.2, где обозначены:
Хкрп=CхкрпFкрпq - сила лобового сопротивления корпуса 1,
Xоп=CхопFопq - сила лобового сопротивления оперения без дополнительной лопасти 8,
Хлп=СхлпFлпq - сила лобового сопротивления дополнительной лопасти оперения 8,
Схлп, Схкрп, Схоп - соответственно коэффициент лобового сопротивления дополнительной поперечной лопасти 8, корпуса 1, стабилизирующего оперения без дополнительной лопасти 8 (двух лопастей 7 и четырех штанг 6);
Fлп, Fкрп, Fоп - соответственно характерные площади дополнительной поперечной лопасти 8, корпуса 1, стабилизирующего оперения без дополнительной лопасти 8 (двух лопастей 7 и четырех штанг 6);
yлп, yкрп, yоп - соответственно вертикальные координаты центров приложения лобового сопротивления поперечной дополнительной лопасти 8, корпуса 1 и стабилизирующего оперения без дополнительной лопасти 8 (двух лопастей 7 и четырех штанг 6),
Р, yР - соответственно сила отрицательной плавучести подводного устройства и вертикальная координата ее центра приложения Ср,
Oxyz - система связанных координат с началом О в середине оси шарнирного узла 3, горизонтальная ось Ox совпадает по направлению с продольной осью корпуса 1, вертикальная ось Oy проходит через центр отрицательной плавучести Ср,
q=pV2/2,
V - скорость набегающего потока,
p - плотность воды.
Условие балансировки моментов внешних гидродинамических сил, воздействующих на опускное подводное устройство, относительно оси шарнирного узла, может быть представлено в математической форме, как
Хлпyлп=Хкрпyкрп+Хопyoп,
или, после сокращения на q,

Форму в плане дополнительной лопасти 8, ее площадь Fлп и расположение определяют, например, следующим образом. Правая часть выражения (1) определяется в результате гидродинамического расчета подводного устройства без учета дополнительной лопасти 8. Далее, задавшись формой в плане лопасти, принимают табличное значение коэффициента сопротивления, например Cxлп=1,2 для прямоугольной пластины (Виноградов Н.И., Крейндель С.А., Лев И.Г., Нисневич М.З. Привязные подводные системы. Аэрогидродинамические характеристики при установившемся движении. - СПб: Изд-во С.-Петерб. ун-та, 2005. - С.112), затем определяют произведение площади дополнительной лопасти Fлп и вертикальной координаты центра ее гидродинамического сопротивления yлп. Из конструктивных соображений выбирается один из этих параметров, например площадь лопасти Fлп, а второй yлп вычисляется согласно (1).
Пусть, например, в результате гидродинамического расчета подводного устройства без учета дополнительной лопасти определено
СхкрпFкрпyкрп+CxопFопyоп=0,18 м3.
При Схлп=1,2 имеем Fлп yлп=0,15 м3. Тогда, если принять площадь лопасти Fлп =0,3 м2, то yлп=0,5 м.
Другим методом выбора формы в плане дополнительной лопасти, ее площади и расположения, обеспечивающих балансировку опускного подводного устройства, может служить использование компьютерной модели обтекания твердых тел набегающим потоком жидкости, например, известного программного комплекса системы автоматизированного проектирования SolidWorks Flow Simulation.
В случае, когда опускное устройство, погруженное в равномерный набегающий поток, одновременно подвергается возмущающему воздействию качки судна-носителя, оно совершает линейные вертикальные и горизонтальные колебания относительно своего статического состояния, что приводит к изменениям скоростей и углов атаки набегающего потока и, соответственно, гидродинамических сил и моментов, действующих на корпус и стабилизирующее оперение, приводящих к статическим и динамическим угловым отклонениям устройства. При этом факторами, уменьшающими эти отклонения, являются восстанавливающий момент отрицательной плавучести (благодаря размещению центра плавучести Ср ниже оси шарнирного узла 3) и стабилизирующий момент оперения с дополнительной лопастью 8, горизонтальной по размаху и с хордой, расположенной перпендикулярно продольной оси устройства, и которая установлена позади и выше шарнирного узла 3 элемента присоединения 4 гибкой связи 5 и отделенно от корпуса 1 (благодаря чему обеспечивается минимизация площади горизонтальной проекции стабилизирующего оперения и тем самым возмущений от вертикальной качки при сохранении стабилизации хода подводного устройства по курсу).
Последний фактор в условиях работы при малых скоростях набегающего потока, вызванного движением судна в дрейфе, либо от морского течения при якорной стоянке судна, и воздействия качки судна, обеспечивает существенное улучшение угловой стабилизации по дифференту подводного опускного устройства по сравнению с прототипом, а также с подводными аппаратами, использующими для балансировки оперение с горизонтальными лопастями, рулями или интерцепторами.
Для подтверждения эффективности предлагаемого устройства на фиг.3 представлены графики зависимости максимальных отклонений устройства по углу дифферента tetsum (сумма постоянной составляющей и угловой амплитуды с 3% обеспеченностью, град) от периодов качки судна-носителя (tv, с), полученные в результате математического моделирования динамики опускаемого подводного устройства массой М=100 кг при длине гибкой связи L=5 м в условиях работы на стопе при воздействия морского течения со скоростью Vт=2 уз и качке судна-носителя на волнении Nv=3 балла для трех вариантов гидродинамической компоновки:
а) с корпусом и стабилизирующим оперением только с вертикальными лопастями в соответствии с прототипом;
б) с корпусом и стабилизирующим оперением, имеющим дополнительную горизонтально расположенную лопасть с интерцептором;
в) с корпусом и стабилизирующим оперением, имеющим дополнительную лопасть, выполненную по предлагаемому изобретению.
Согласно данным графиков суммарные отклонения по углу дифферента опускного подводного устройства со стабилизирующим оперением, имеющим дополнительную поперечную лопасть, существенно (в 2-3 раза) меньше, чем у других вариантов компоновки практически во всем диапазоне возможных периодов качки tv от 3 до 10 с.
Выполненные расчеты показали также, что с уменьшением скорости течения и увеличением длины гибкой связи угловые отклонения подводного устройства еще более уменьшаются.
Таким образом, предложенная конструкция опускного подводного устройства обеспечивает улучшение угловой стабилизации в условиях работы при малых скоростях набегающего потока, вызванного движением судна в дрейфе, или от морского течения при якорной стоянке судна, и воздействия качки судна-носителя.
Указанное устройство можно использовать для обследования придонной зоны акватории с целью поисковых работ, для обеспечения гидроакустической навигации или для гидроакустических экспериментов. Улучшение стабильности опускного подводного устройства в свою очередь приводит к повышению точности проводимых работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНЫЙ БУКСИРУЕМЫЙ АППАРАТ | 1995 |
|
RU2096246C1 |
| ПОДВОДНЫЙ БУКСИРУЕМЫЙ АППАРАТ | 1990 |
|
RU2096245C1 |
| БУКСИРУЕМЫЙ НОСИТЕЛЬ ДЛЯ ГИДРОНАВТОВ | 1993 |
|
RU2070130C1 |
| ПОДВОДНЫЙ ПЛАНЕР (ВАРИАНТЫ) | 2012 |
|
RU2490164C1 |
| СУДНО | 2007 |
|
RU2437797C2 |
| СПОСОБ УПРАВЛЕНИЯ ДИФФЕРЕНТОМ БУКСИРУЕМОГО ПОДВОДНОГО ОБЪЕКТА | 2017 |
|
RU2657701C1 |
| Привязной аэростат с автожирным винтом стабилизатором | 2015 |
|
RU2628545C2 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ДВИЖЕНИЯ НАДВОДНОГО ОДНОКОРПУСНОГО ВОДОИЗМЕЩАЮЩЕГО БЫСТРОХОДНОГО СУДНА | 2013 |
|
RU2562086C2 |
| БУКСИРУЕМОЕ ПОДВОДНОЕ УСТРОЙСТВО С ГОРИЗОНТАЛЬНОЙ СТАБИЛИЗАЦИЕЙ | 1999 |
|
RU2148003C1 |
| ДВИЖИТЕЛЬ, ИСПОЛЬЗУЮЩИЙ ЭНЕРГИЮ ВОЛН | 1999 |
|
RU2154002C1 |
Изобретение относится к области подводной техники, в частности к опускным подводным аппаратам, предназначенным для эксплуатации в режиме спуска, подъема и удержания их на определенной глубине при малых скоростях набегающего потока и качке судна-носителя. Опускное подводное устройство содержит стабилизирующее оперение позади корпуса с лопастями, установленными с малыми углами наклона относительно продольной оси устройства. Стабилизирующее оперение дополнено лопастью, горизонтальной по размаху и с хордой, расположенной перпендикулярно продольной оси устройства. Дополнительная лопасть установлена выше шарнирного узла элемента присоединения гибкой связи и отделённо от корпуса. При этом дополнительная лопасть прикреплена к задним кромкам лопастей стабилизирующего оперения. Форма в плане дополнительной лопасти, ее площадь и размещение выбраны из условия уравновешивания гидродинамических моментов корпуса и оперения относительно оси шарнирного узла. Технический результат заключается в улучшении угловой стабилизации опускного подводного устройства в условиях работы при малых скоростях набегающего потока, вызванного движением судна в дрейфе или от морского течения при якорной стоянке судна, а также воздействия качки судна-носителя. 3 ил.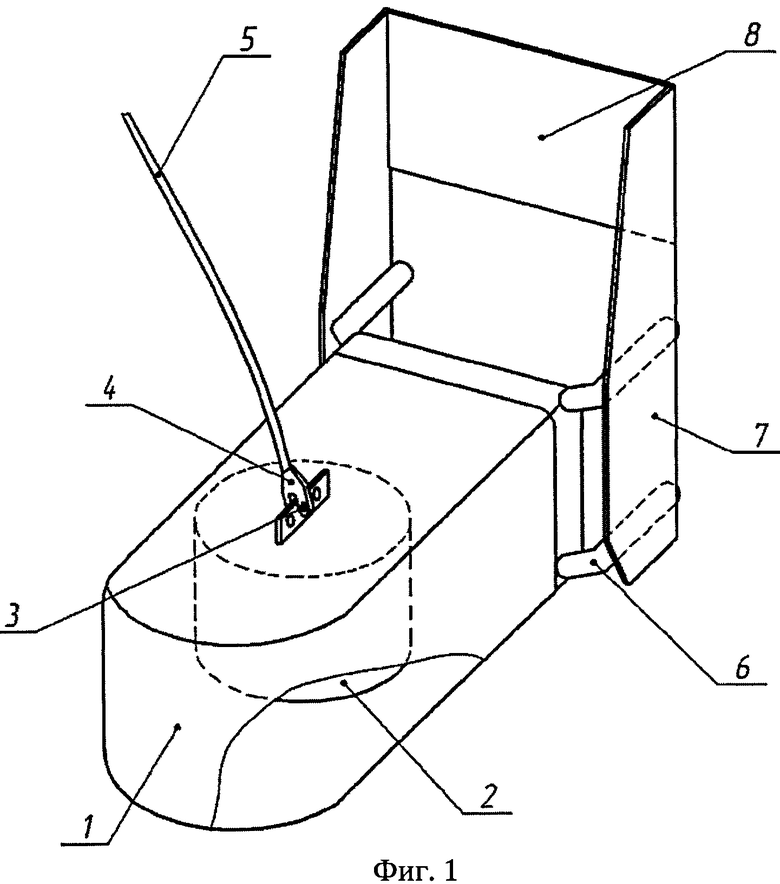
Опускное подводное устройство, содержащее корпус отрицательной плавучести, шарнирный узел для элемента присоединения гибкой связи с надводным судном, расположенный в верхней части корпуса, стабилизирующее оперение позади корпуса с лопастями, установленными с малыми углами наклона относительно продольной оси устройства, отличающееся тем, что стабилизирующее оперение дополнено лопастью, горизонтальной по размаху и с хордой, расположенной перпендикулярно продольной оси устройства, дополнительная лопасть установлена выше шарнирного узла элемента присоединения гибкой связи и отделённо от корпуса, при этом дополнительная лопасть прикреплена к задним кромкам лопастей стабилизирующего оперения, форма в плане дополнительной лопасти, ее площадь и размещение выбраны из условия уравновешивания гидродинамических моментов корпуса и оперения относительно оси шарнирного узла.
| SU 1807642 A1, 20.02.1996 | |||
| БУКСИРУЕМЫЙ АКУСТИЧЕСКИЙ ПРИЕМНИК | 0 |
|
SU333097A1 |
| ПОДВОДНЫЙ БУКСИРУЕМЫЙ АППАРАТ | 1990 |
|
RU2096245C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| US 4262621 A, 21.04.1981 | |||
| ТЕРМИНАЛЬНОЕ УСТРОЙСТВО, УСТРОЙСТВО БАЗОВОЙ СТАНЦИИ И СПОСОБ СВЯЗИ | 2018 |
|
RU2774063C2 |

