Изобретение относится к области техники пеленгования и может быть использовано в службе спасения кораблей, судов, самолетов и других летательных аппаратов, терпящих бедствие.
Известен способ определения местоположения пеленгуемой радиостанции по пеленгованию ее сигналов по крайней мере из двух точек, удаленных друг от друга на определенное расстояние в зависимости от дальности пеленгования и местоположения радиостанции, определяется пересечением ("засечкой") линий пеленгов.
Точность определения местоположения радиостанции определяется объективными условиями уровнем развития техники пеленгования, условиями распространения радиоволн, выбранной позицией для пеленгования и субъективными условиями профессионализмом операторов-радиопеленгаторов.
Цель изобретения повышение точности определения местоположения работающей радиостанции.
Указанная цель достигается тем, что в дальномерном способе определения местоположения радиостанции по разности прихода радиосигнала во времени по крайней мере в трех пунктах приема, удаленных друг от друга на определенное расстояние в зависимости от дальности определения местоположения радиостанции, причем пункты приема должны находиться на одной прямой, производится прием радиосигнала работающей радиостанции, с высокой, наперед заданной точностью определяются моменты времени прихода радиосигнала в пункты приема t1, t2 и t3, а разность Δti= ti-tk является временем запаздывания прихода радиосигнала в пункты приема, по времени запаздывания прихода радиосигнала Δti определяют расстояние Δli, которое проходит радиосигнал, по формуле
Δli= c•Δti (1)
где c скорость света,
после этого определяют расстояния от местоположения радиостанции до пунктов приема по формулам
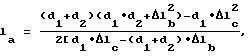
для случая la<lb<lc:
где d1 расстояние между пунктами приема A и B,
d2 расстояние между пунктами приема B и C,
Δlb расстояние, пройденное радиосигналом за время запаздывания Δtb= tb-ta,
Δlc расстояние, пройденное радиосигналом за время запаздывания Δtc= tc-ta,
для случая la>lb<lc:
где d1 расстояние между пунктами приема A и B,
d2 расстояние между пунктами приема B и C,
Δla расстояние, пройденное радиосигналом за время запаздывания Δta= ta-tb,
Δlc расстояние, пройденное радиосигналом за время запаздывания Δtc= tc-tb,
для случая la>lb>lc:
где d1 расстояние между пунктами приема A и B,
d2 расстояние между пунктами приема B и C,
Δla расстояние, пройденное радиосигналом за время запаздывания Δta= ta-tc,
Δlb расстояние, пройденное радиосигналом за время запаздывания Δtb= tb-tc,
далее по вычисленным расстояниям la, lb и lc соответственно из пунктов приема A, B и C в масштабе используемой географической карты производится засечка, которая и будет точкой местоположения работающей радиостанции.
В предлагаемом дальномерном способе с высокой наперед заданной точностью определяются моменты времени прихода радиосигнала работающей радиостанции в пункты приема, вычисляют время запаздывания прихода радиосигнала в два других пункта приема относительно третьего, вычисляют расстояния, пройденные радиосигналом за время запаздывания, и по формулам (2)-(10) вычисляют расстояния от точки местоположения радиостанции до пунктов приема, а по вычисленным расстояниям делается засечка, которая и является местоположением работающей радиостанции.
Это отличие позволяет сделать вывод о соответствии заявляемого способа критерию "новизна". Признаки, отличающие заявляемый способ от известного ранее, не заявлены в других способах определения местоположения радиостанций при изучении данной и смежной областей техники и, следовательно, обеспечивают заявляемому способу соответствие критерию "существенные отличия".
На фиг.1 представлен чертеж определения местоположения радиостанции для случая la<lb<lc.
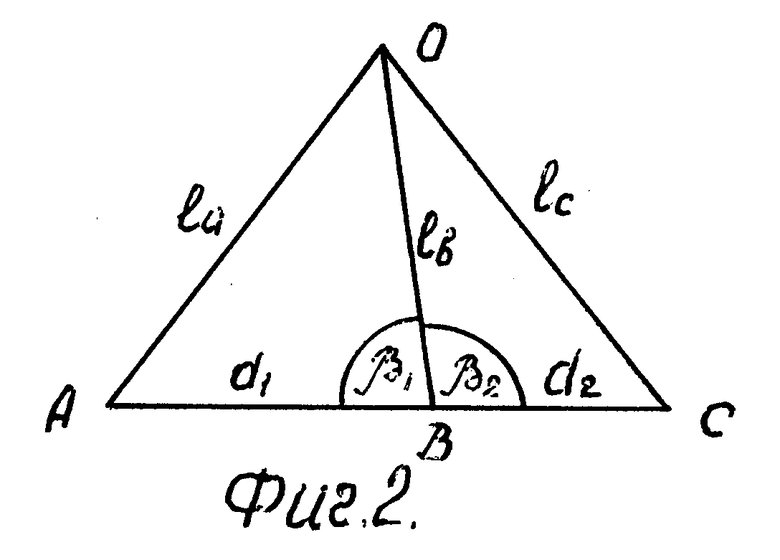
На фиг.2 представлен чертеж определения местоположения радиостанции для случая la>lb<lc.
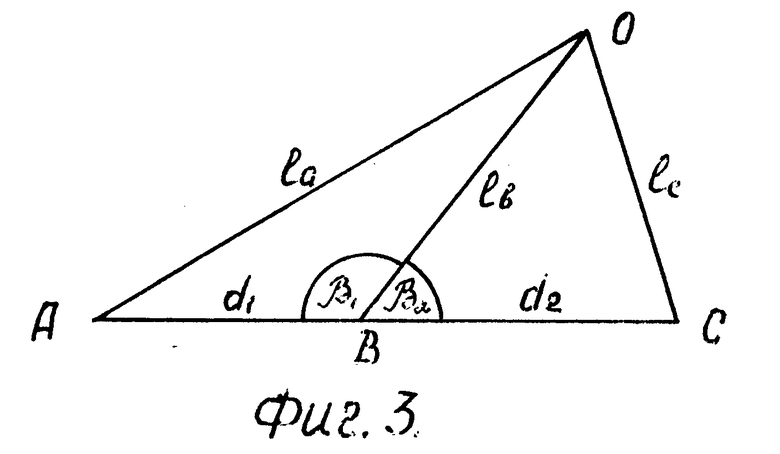
На фиг.3 представлен чертеж определения местоположения радиостанции для случая la>lb>lc.
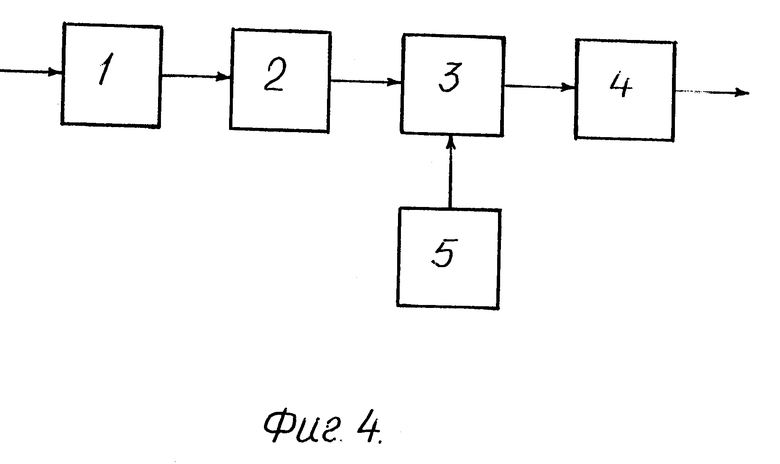
На фиг.4 представлена структурная схема устройства пункта приема.
Известны расстояние d1 между пунктами приема A и B, расстояние d2 между пунктами приема B и C (фиг.1). С высокой наперед заданной точностью определяются моменты времени прихода радиосигнала работающей радиостанции в пункты приема ta, tb и tc. Рассчитывается время запаздывания прихода радиосигнала в пункт приема B по отношению к пункту приема A и в пункт приема C по отношению к пункту приема A по формулам
Рассчитываются расстояния, пройденные радиосигналом за время запаздывания Δtb и Δtc по формулам
где c скорость света.
Угол β1 угол между прямой, соединяющей пункты приема A и B, и направлением из пункта приема B в точку местоположения радиостанции, угол β2/ угол между прямой, соединяющей пункты приема B и C, и направлением из пункта приема B в точку местоположения радиостанции, причем β1+β2= 180, отсюда cosβ1= -cosβ2
По теореме косинусов
 (15)
(15)
Решая систему уравнений (15) относительно la, получим
где d1 расстояние между пунктами приема A и B,
d2 расстояние между пунктами приема B и C,
la расстояние между пунктом приема A и точкой местоположения радиостанции,
Δlb расстояние, пройденное радиосигналом за время запаздывания Δtb,
Δlc расстояние, пройденное радиосигналом за время запаздывания Δtc.
Расстояния между пунктами приема B и C и точкой местоположения радиостанции рассчитываются по формулам
Известны расстояния между пунктами приема A и B d1, между пунктами приема B и C d2 (фиг.2). Определяются моменты времени прихода радиосигнала работающей радиостанции в пункты приема ta, tb и tc. Рассчитывается время запаздывания прихода радиосигнала в пункты приема A и C по отношению к пункту приема B по формулам
Рассчитываются расстояния, пройденные радиосигналом за время запаздывания Δta и Δtc по формулам
По теореме косинусов
Решая систему уравнений (23) относительно lb, получим
где d1 расстояние между пунктами приема A и B,
d2 расстояние между пунктами приема B и C,
lb расстояние между пунктом приема B и точкой местоположения радиостанции,
Δla/ расстояние, пройденное радиосигналом за время запаздывания Δta,
Δlc расстояние, пройденное радиосигналом за время запаздывания Δtc.
Расстояние между пунктами приема A и C и точкой местоположения радиостанции рассчитывается по формулам
Известны расстояния между пунктами приема A и B d1, между пунктами приема B и C d2 (фиг.3). Определяются моменты времени прихода радиосигнала работающей радиостанции в пункты приема ta, tb и tc. Рассчитывается время запаздывания прихода радиосигнала в пункты приема A и B по отношению к пункту приема C по формулам
Рассчитываются расстояния, пройденные радиосигналом за время запаздывания Δta и Δtb по формулам
где c скорость света.
По теореме косинусов
Решая систему уравнений (31) относительно lc, получим
где d1 расстояние между пунктами приема A и B,
d2 расстояние между пунктами приема B и C,
lc расстояние между пунктом приема С и точкой местоположения радиостанции,
Δla расстояние, пройденное радиосигналом за время запаздывания Δta,
Δlc расстояние, пройденное радиосигналом за время запаздывания Δtb.
Расстояния между пунктами приема A и B и точкой местоположения радиостанции рассчитываются по формулам
По вычисленным расстояниям la, lb и lc соответственно из пунктов приема A, B и C в масштабе используемой географической карты производится засечка, которая является точкой местоположения работающей радиостанции.
Структурная схема пункта приема, реализующая предлагаемый способ, (фиг. 4) содержит радиоприемное устройство 1, демодулятор 2, устройство отсчета и регистрации моментов времени 3, формирователь образцовой шкалы времени с опорным генератором 4, устройство передачи данных по каналам связи в пункт сбора информации 5.
Работа структурной схемы пункта приема (фиг.4). Принятый антенной и усиленный радиоприемным устройством 1 радиосигнал поступает на вход демодулятора 2, с выхода демодулятора телеграфный сигнал, несущий информацию, состоит из последовательности телеграфных посылок. Телеграфный сигнал поступает на первый вход устройства отсчета и регистрации моментов времени 3, а на второй вход поступают импульсы с выхода формирователя образцовой шкалы времени 4. Отсчет и регистрация моментов времени в устройстве 3 происходит по фронтам посылок телеграфного сигнала. С выхода устройства 3 информация об отсчете моментов времени поступает на вход устройства передачи данных 5 и далее по каналам связи на пункт сбора информации.
Таким образом, со всех пунктов приема данные поступают на пункт сбора информации, где они по определенной программе обрабатываются и анализируются. В результате обработки определяются величины Δti и Δli. По рассчитанным величинам Δli по одному из трех случаев (указанных на фиг.1-3) рассчитывают li и по рассчитанным дальностям li на географической карте определяется местоположение радиостанции.
Использование предлагаемого дальномерного способа определения местоположения радиостанции обеспечивает следующие преимущества по сравнению с известным способом.
Необходимая точность определения местоположения работающей радиостанции дальномерным способом обеспечивается заданной точностью определения моментов времени прихода радиосигнала в пункты приема и заданной точностью последующих вычислений. Так, при частоте опорного генератора формирователя образцовой шкалы времени Fo=10 мГц моменты времени прихода радиосигнала в пункты приема определяются с точностью ±1•10-7 сек и с такой же точностью рассчитано время запаздывания прихода радиосигнала в пункты приема, при этом точность определения расстояний составит величину ±30 м, а точность расчета расстояний la, lb и lc будет определяться в дальнейшем точностью вычислений по приведенным выше формулам.
Процесс отсчета моментов времени может быть только автоматизированным, поэтому исключается субъективный фактор ошибки отсчета пеленга - оператора-радиопеленгатора.
Предлагаемый способ не требует использования громоздких пеленгаторных антенн, что приводит к экономии материальных ресурсов.
Используемая литература.
Патент Франции N 2504275, кл. G 01, 1982 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ НА ОСНОВЕ ОВАЛОВ КАССИНИ | 2022 |
|
RU2802369C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА НАРУШЕНИЯ СИГНАЛИЗАЦИОННОГО РУБЕЖА | 2012 |
|
RU2519046C2 |
| ДАЛЬНОМЕРНЫЙ СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2506605C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИЗЛУЧАЮЩЕЙ ОБЗОРНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2010 |
|
RU2444748C2 |
| ДВУХШКАЛЬНЫЙ НОНИУСНЫЙ СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕННЫХ ИНТЕРВАЛОВ | 1990 |
|
RU2054707C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВРЕМЕННЫХ ИНТЕРВАЛОВ | 1991 |
|
RU2010286C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАКСИМАЛЬНО ПРИМЕНИМОЙ ЧАСТОТЫ ДЛЯ ИОНОСФЕРНОЙ РАДИОСВЯЗИ | 2012 |
|
RU2516239C2 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА РАДИОСИГНАЛОВ НАЗЕМНЫХ РАДИОМАЯКОВ | 2010 |
|
RU2432679C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА РАДИОСИГНАЛОВ НАЗЕМНЫХ РАДИОМАЯКОВ | 2010 |
|
RU2432675C1 |
| СПОСОБ ПЕРЕДАЧИ РАДИОСИГНАЛОВ ИСТОЧНИКОМ РАДИОИЗЛУЧЕНИЯ | 2010 |
|
RU2439800C1 |
Изобретение относится к области техники пеленгования и может быть использовано в службе спасения кораблей, судов, самолетов и других летательных аппаратов, терпящих бедствие. Цель изобретения - повышение точности определения местоположения работающей радиостанции. Поставленная цель достигается тем, что по крайней мере в трех пунктах приема, расположенных на одной прямой, измеряются моменты времени прихода радиосигнала работающей радиостанции ta, tb и tc. Затем определяется время запаздывания прихода радиосигнала в два других пункта приема относительно третьего. По времени запаздывания прихода радиосигнала в пункты приема рассчитываются расстояния, пройденные радиосигналом, по формуле
Δli= c•Δti,
где c - скорость света, Δti - время запаздывания прихода радиосигнала в пункт приема. После этого рассчитываются расстояния от пунктов приема до точки местоположения радиостанции по формулам, приведенным в тексте описания изобретения. 3 с. п. ф-лы, 4 ил.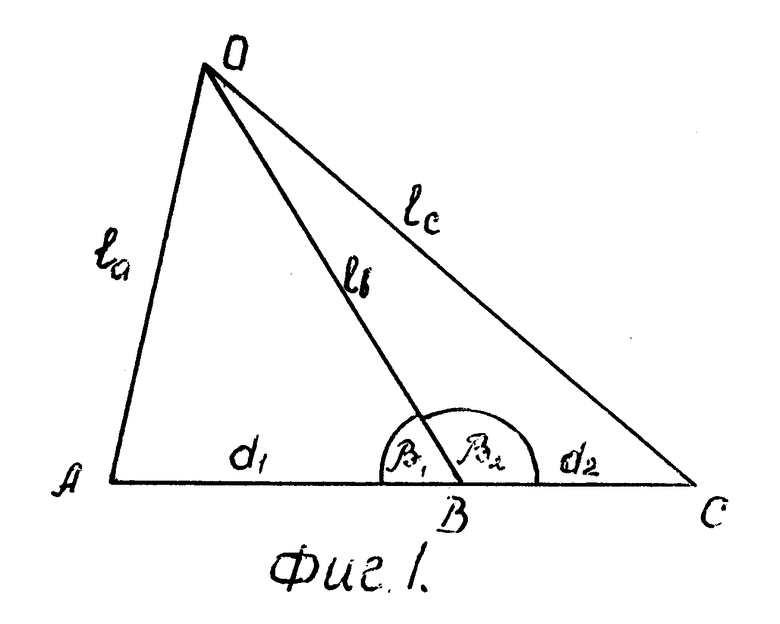
где d1 расстояние между пунктами приема А и В;
d2 расстояние между пунктами приема В и С;
Δlb - расстояние, пройденное радиосигналом за время запаздывания Δtb = tb-ta;
Δlc - расстояние, пройденное радиосигналом за время запаздывания Δtc = tc-ta, lb = la+Δlb, lc = la+Δlc,
причем la < lb < lc.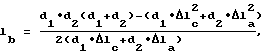
где d1 расстояние между пунктами приема А и В;
d2 расстояние между пунктами приема В и С;
Δla - расстояние, пройденное радиосигналом за время запаздывания Δta = ta-tb;
Δlc - расстояние, пройденное радиосигналом за время запаздывания Δtc = tc-tb, la = lb+Δla, lc = lb+Δlc,
причем la > lb < lc.
где d1 расстояние между пунктами приема А и В;
d2 расстояние между пунктами приема В и С;
Δla - расстояние, пройденное радиосигналом за время запаздывания Δta = ta-tc;
Δlb - расстояние, пройденное радиосигналом за время запаздывания Δtb = tb-tc, la = lc+Δla, lb = lc+Δlb,
причем la > lb > lc.
| FR, патент, 2504275, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
