Изобретение относится к радиотехнике, а именно к пассивной радиолокации, и может быть использовано в системах радиоконтроля при решении задачи скрытного определения координат объектов-носителей обзорных радиолокационных станций (РЛС), работающих на излучение.
Общий недостаток, свойственный пассивной радиолокации, является следствием того факта, что из-за отсутствия информации о времени излучения сигнала дальность до источника излучения не может быть определена по данным приема только в одном пункте. Поэтому для определения всех координат излучающего объекта требуется комплекс из двух или более разнесенных пунктов приема, объединенных каналами связи [1].
Известен разностно-дальномерный способ определения координат, основанный на измерении разности расстояний (или разности временных задержек сигнала) от источника излучения до пунктов приема. Для определения (вычисления) координат на плоскости (пеленг и дальность) необходимо знать расстояние между пунктами приема и измерить хотя бы две разности временных задержек сигнала, т.е. иметь минимум три пункта приема [2], [3].
Недостатки способа:
- требует для реализации большого аппаратурного состава;
- требуются большие расстояния между приемными пунктами;
- необходимы каналы связи (радиосвязи) для передачи принятых сигналов в пункт вычисления координат источника излучения.
Также известен угломерно-разностно-дальномерный способ, основанный на измерении направления на источник излучения и разности расстояний от него до приемных пунктов. При измерении координат на плоскости достаточно иметь минимум два приемных пункта. Недостатки способа - такие же, как и в предыдущем случае, но аппаратура для реализации способа должна иметь хотя бы в одном приемном пункте радиопеленгатор, измеряющий направление на источник излучения [5, с.497].
Наиболее близким по технической сущности к предлагаемому является триангуляционный способ определения дальности до источника излучения, принятый в качестве прототипа. Способ основан на измерении направлений (пеленгов) на излучающий объект минимум в двух приемных пунктах, разнесенных на некоторое известное расстояние, называемое измерительной базой, и вычислением дальности до объекта по двум пеленгам и измерительной базе [5, с.496].
При радиоконтроле триангуляционный способ включает обнаружение и пеленгование источника радиоизлучения разнесенными в плоскости пеленгования радиопеленгаторами, идентификацию принятых радиопеленгаторами сигналов по измеренным в приемных пунктах параметрам сигналов, и вычисление дальности до излучающего объекта по известной измерительной базе (базам) и измеренным в пунктах приема пеленгам [4].
Недостатки способа-прототипа:
- большой аппаратурный состав, требующий минимум двух радиопеленгаторов;
- большая измерительная база, зачастую соизмеримая с дальностью до объекта ввиду ограниченной точности пеленгования, что не позволяет реализовать способ на одном подвижном объекте (корабль, самолет, ракета) - носителе радиопеленгатора;
- наличие каналов связи (радиосвязи) для передачи результатов измерений направлений в пункт обработки данных.
Целью изобретения является устранение недостатков способа-прототипа, а именно:
- уменьшение и упрощение аппаратурного состава;
- уменьшение измерительной базы до величины, приемлемой для объекта-носителя пеленгатора;
- исключение (ввиду уменьшения измерительной базы) каналов связи (радиосвязи),
что позволило бы реализовать способ пассивного измерения дальности до ИРИ на подвижных объектах-носителях.
Техническим результатом изобретения является возможность определения дальности до излучающей антенны обзорной РЛС при наличии на объекте-носителе радиопеленгатора дополнительного приемного пункта, антенна которого образует с антенной пеленгатора измерительную базу, существенно меньшую по размерам, чем при реализации триангуляционного способа определения дальности.
Определение дальности до излучающей антенны обзорной РЛС основывается на измерении интервала времени прохождения сканирующего луча антенны РЛС по измерительной базе при известном измеренном периоде сканирования (обзора) РЛС.
Для достижения указанного технического результата предлагается способ определения дальности до излучающей обзорной РЛС, включающий:
- обнаружение и пеленгование сигналов обзорных РЛС радиопеленгатором;
- измерение параметров сигналов РЛС, в том числе времени прихода отдельных импульсов и их амплитуд, пачечных сигналов и периода сканирования антенны РЛС;
- обнаружение сигналов дополнительным приемным пунктом, антенна которого образует с антенной пеленгатора измерительную базу;
- измерение параметров сигналов и их идентификацию с сигналами, обнаруженными пеленгатором;
- нормировку по амплитуде и запоминание пачечных сигналов, обнаруженных пеленгатором и дополнительным приемным пунктом;
- расчет по измеренным временным и нормированным амплитудным характеристикам пачек сигналов времени запаздывания между пачками сигналов как среднее значение временного интервала, который вычисляется в каждом периоде повторения сигналов РЛС как отношение разности времен прихода текущего и предыдущего импульсов одной пачки к разности их нормированных амплитуд, умноженное на разность нормированных амплитуд текущих импульсов обеих пачек;
- определение угла поворота антенны РЛС, соответствующего данной измерительной базе и дальности до РЛС по найденному времени запаздывания между пачками сигналов и измеренному ранее периоду сканирования антенны РЛС;
- вычисление дальности до РЛС как отношение проекции измерительной базы на плоскость фронта приходящих сигналов от РЛС к углу поворота антенны РЛС, выраженному в радианах.
Другим техническим результатом изобретения является улучшение точности определения дальности.
Технический результат достигается тем, что в способе определения дальности до излучающей обзорной РЛС рассчитанное время запаздывания между пачками сигналов вычитается из каждого временного интервала, вычисленного в каждом периоде повторения сигналов РЛС, определяется дисперсия и среднеквадратическое отклонение времени запаздывания между пачками, по правилу «Три сигма» [6, с.290] исключаются промахи, после чего повторяются вычисления времени запаздывания между пачками сигналов, угла поворота антенны РЛС и дальности до РЛС.
Еще одним техническим результатом изобретения является сокращение аппаратного состава комплекса, реализующего способ.
Технический результат достигается тем, что в способе определения дальности до излучающей обзорной РЛС дополнительный пункт приема и измерительную базу образуют за счет перемещения носителя пеленгатора.
Существо предлагаемого способа и результаты моделирования поясняются чертежами.
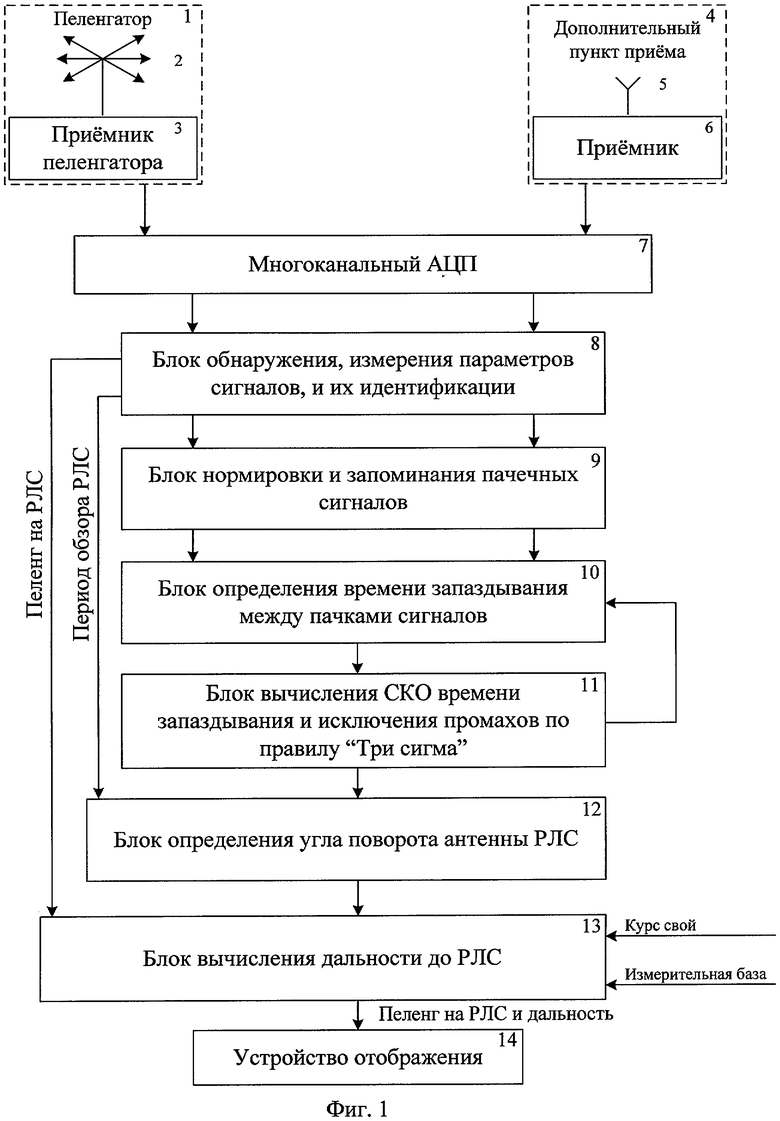
Фиг.1. Структурная схема устройства определения дальности до излучающей обзорной радиолокационной станции.
Фиг.2. Нормированные пачки I и II сигналов пеленгатора и дополнительного приемного пункта.
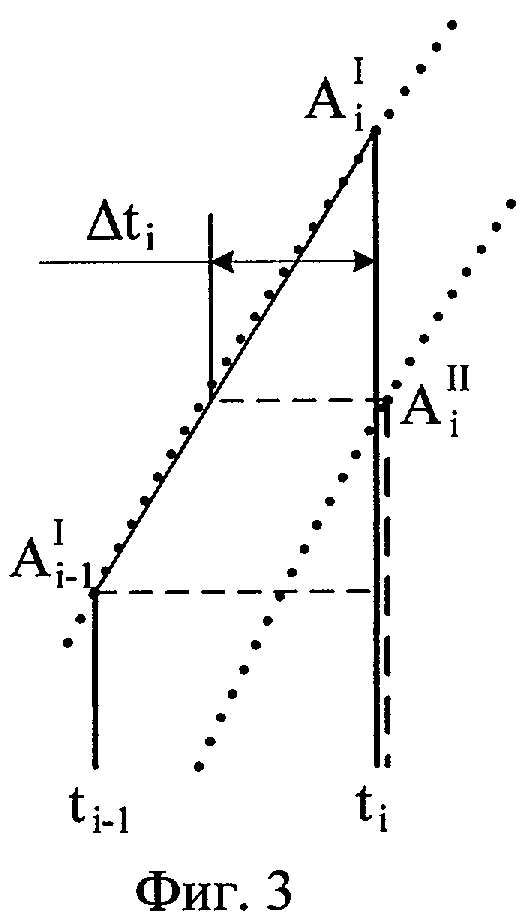
Фиг.3. Фрагмент i-ого периода повторения сигналов нормированных пачек I и II фиг.2.
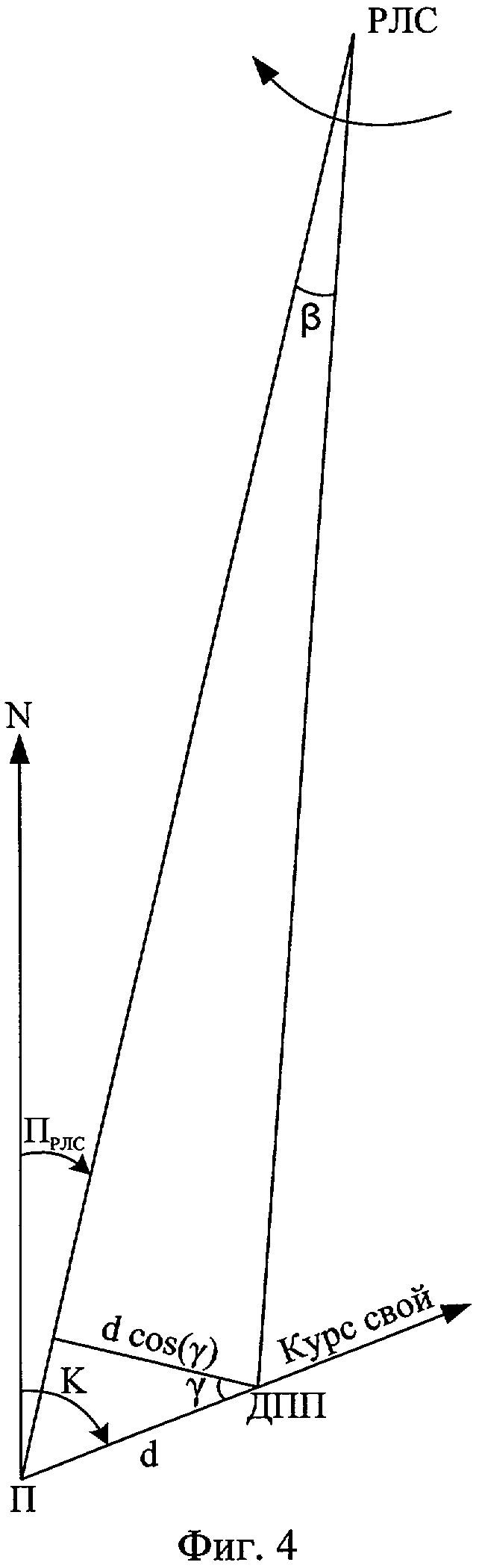
Фиг.4. Взаимное расположение обзорной РЛС, радиопеленгатора (П) и дополнительного пункта приема (ДПП).
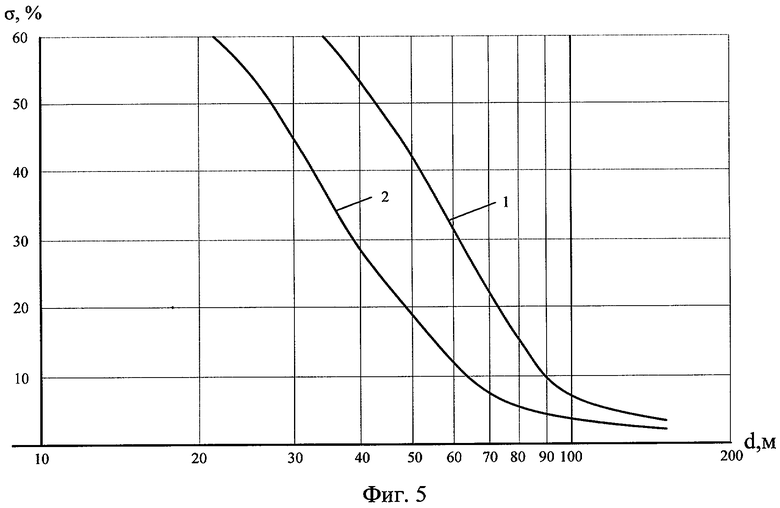
Фиг.5. Ошибка определения дальности предложенным способом.
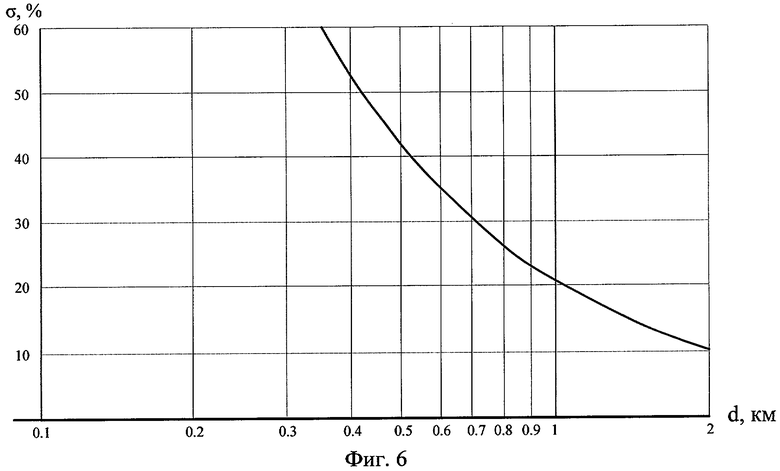
Фиг.6. Ошибка определения дальности триангуляционным способом.
На чертежах приняты следующие обозначения:
Фиг.2: •••••• огибающие пачек сигналов;
 амплитуда импульсов пачки I;
амплитуда импульсов пачки I;
- - - - амплитуда импульсов пачки II.
Фиг.3: AI и AII - амплитуда импульсов пачек I и II;
ti-1 и ti - время прихода предыдущего и текущего импульса;
Δti - временной интервал запаздывания пачек для i-ого периода повторения.
Фиг.4: N - направление на север;
d - величина измерительной базы;
ПРЛС - пеленг на РЛС;
К - курс носителя пеленгатора;
β - угол поворота антенны РЛС, соответствующий данной измерительной базе и определяемой дальности до РЛС.
Фиг.5: d - измерительная база;
1 - ошибка без исключения промахов;
2 - ошибка после исключения промахов по правилу «Три сигма».
Способ определения дальности до излучающей обзорной РЛС осуществляется следующим образом.
1. Излученный обзорной РЛС сигнал обнаруживается как пеленгатором, так и дополнительным приемным пунктом, причем антенна последнего образует с антенной пеленгатора измерительную базу.
2. Производится измерение необходимых для идентификации параметров обнаруженных сигналов (несущая частота, длительность и пр.), а также измеряются:
- направление прихода сигналов - пеленг на РЛС (достаточно выполнить только по сигналам пеленгатора);
- пачечные сигналы от РЛС (временное положение и амплитуда каждого импульса пачки);
- период сканирования (обзора) РЛС за время не менее чем два обзора и идентификация пачечных сигналов, принадлежащих одной и той же РЛС.
3. Выполняется нормировка идентифицированных пачечных сигналов, обнаруженных пеленгатором и дополнительным приемным пунктом по импульсу с максимальной амплитудой в пачке, и запоминание нормированных пачек.
В результате, если представить пачки в координатах амплитуда - время, то они будут иметь вид, показанной схематически на фиг.2.
Характерно, что ввиду малой величины измерительной базы, используемой в предлагаемом способе определения дальности, разнос максимумов пачек весьма невелик и импульсы в пачках почти совпадают во времени, что не позволяет использовать разности временных задержек сигналов между пунктами приема для определения дальности, как в рассмотренных выше разностно-дальномерном и угломерно-разностно-дальномерном способах.
Из фиг.2 также следует, что время прохода сканирующего луча антенны РЛС по измерительной базе может быть определено как удлинение (по времени) логической суммы пачек по сравнению с длительностью отдельной пачки. Представляется целесообразным определять упомянутое время прохода сканирующего луча как время запаздывания между пачками, которое, в свою очередь, следует определить как среднее значение временного интервала, определяемого в каждом периоде повторения сигналов РЛС.
4. По измеренным временным и нормированным амплитудным характеристикам пачек сигналов рассчитывается время запаздывания между пачками сигналов как среднее значение временного интервала, который вычисляется в каждом периоде повторения сигналов РЛС как отношение разности времен прихода текущего и предыдущего импульсов одной пачки к разности их амплитуд, умноженное на разность нормированных амплитуд текущих импульсов обоих пачечных сигналов. Нахождение временного интервала в i-ом периоде повторения пачечного сигнала поясняется фиг.3, где изображен фрагмент двух пачек, обведенный кружком на фиг.2, при этом отрезки огибающих пачек между импульсами аппроксимированы прямой, что достаточно справедливо при типичном числе импульсов в пачке N>10. Временной интервал Δti для i-ого периода повторения и время запаздывания между пачками сигналов tзап рассчитываются по формулам:


где ti и ti-1 - измеренное время прихода соответственно текущего и предыдущего импульса в одной пачке;
 и
и  - нормированные амплитуды соответственно текущего и предыдущего импульсов в одной пачке;
- нормированные амплитуды соответственно текущего и предыдущего импульсов в одной пачке;
и  - нормированные амплитуды текущих импульсов в первой (I) и второй (II) пачках;
- нормированные амплитуды текущих импульсов в первой (I) и второй (II) пачках;
N - число импульсов в пачке.
В области максимума пачки разность амплитуд импульсов в соседних периодах повторения мала и это приводит к большим ошибкам в определении временных интервалов Δti. С целью уточнения величины запаздывания производится статистическая обработка вычисленных величин Δti по правилу «Три сигма», а именно: из каждого значения Δti, вычитается ее среднее значение - величина tзап, вычисляется дисперсия и среднеквадратическое отклонение от среднего значения, и величины Δti, выходящие за пределы (tзап±3σ), где σ - найденное среднеквадратическое отклонение (СКО), исключаются из рассмотрения как промахи, после чего вычисляется уточненное значение времени запаздывания между пачками сигналов обнаруженных пеленгатором и дополнительным приемным пунктом.
5. По найденному времени запаздывания между пачками сигналов и измеренному ранее периоду сканирования антенны РЛС определяют угол поворота антенны РЛС, соответствующий данной измерительной базе по формуле:

где tзап - время запаздывания между пачками сигналов;
Тобз - измеренный период сканирования антенны РЛС.
6. Вычисляется дальность до излучающей обзорной РЛС как отношение проекции измерительной базы на плоскость фронта приходящих сигналов от РЛС к углу поворота антенны РЛС. Рассматриваемая ситуация взаимного расположения РЛС, пеленгатора и дополнительного приемного пункта показана на фиг.4. В предположении, что пеленгатор П и дополнительный приемный пункт расположены в диаметральной плоскости корабля-носителя пеленгатора и дальность до РЛС значительно больше измерительной базы, дальность до РЛС, согласно фиг.4, может быть вычислена по формуле:

где  - направление плоскости фронта приходящих сигналов от РЛС относительно измерительной базы;
- направление плоскости фронта приходящих сигналов от РЛС относительно измерительной базы;
d - величина измерительной базы - расстояние между антеннами пеленгатора и дополнительного приемного пункта.
Устройство (фиг.1), в котором реализуется предложенный способ, содержит пеленгатор 1 с антенной 2 и приемником 3, и дополнительный пункт приема 4 с антенной 5 и приемником 6, выходы которых соединены с входами многоканального аналого-цифрового преобразователя (АЦП) 7, выходы которого подключены к последовательному соединению: блок обнаружения, измерения параметров сигналов и их идентификации 8, блок нормировки и запоминания пачечных сигналов 9, блок определения времени запаздывания между пачками сигналов 10, блок вычисления СКО времени запаздывания и исключения промахов по правилу «Три сигма» 11, блок определения угла поворота антенны РЛС 12, блок вычисления дальности до РЛС 13 и устройство отображения 14.
Пеленгатор 1 может быть различного типа и иметь неподвижную или сканирующую пеленгационную антенну 2, одноканальный или многоканальный (два или более каналов) приемник 3; в последнем случае выходов на АЦП будет несколько, а не один, как показано на фиг.1, что не принципиально для реализации предложенного способа.
Дополнительный приемный пункт 2 должен позволять принимать те же что и пеленгатор сигналы в частотном и динамическом диапазонах, и в отличие от пеленгатора его антенна 5 и приемник 6 могут быть выполнены существенно проще аппаратурно. Многоканальный АЦП 7 управляется общим для всех своих каналов тактовым генератором (на фиг.1 не показан) с возможностью точного отсчета моментов времени, необходимых для измерения параметров сигналов. Начиная с выходов АЦП, ведется обработка цифровых кодов сигналов, принятых пеленгатором 1 и дополнительным приемным пунктом 2, и она может быть осуществлена как аппаратным построением, так и программным путем в ЭВМ вплоть до вывода на устройство отображения 14.
Устройство, реализующее способ определения дальности до излучающей обзорной РЛС, работает следующим образом.
Излученные сканирующей антенной обзорной РЛС сигналы принимаются пеленгационной антенной 2 и антенной 5, образующими измерительную базу, усиливаются и переносятся на промежуточную (или видео) частоту в приемниках 3 и 6, и по радиочастотным кабелям передаются от антенных постов 1 и 2 к рубочной аппаратуре, входным каскадом которой является многоканальный АЦП 7. Напряжения на входах многоканального АЦП 7 (внутриприемные шумы и сигналы от РЛС) преобразуются в АЦП в цифровые коды отсчетов с тактовой частотой, отвечающей полосе наиболее широкополосных принимаемых сигналов. Эти отсчеты подвергаются обработке в дальнейшей части рассматриваемого устройства. Блок 8 осуществляет обнаружение сигналов РЛС на фоне внутриприемных шумов, фиксируя при этом амплитуду и время прихода сигналов, измерение параметров обнаруженных сигналов, причем такие параметры как длительность импульса, несущая частота, период повторения импульсов, длительность пачечного сигнала (ширина антенного луча по азимуту), период сканирования (обзора) антенны РЛС используются для идентификации сигналов (т.е. принадлежности их одной и той же РЛС), принятых пеленгатором 1 и дополнительным приемным пунктом 2, а такие параметры как время прихода и амплитуда каждого обнаруженного импульса, период сканирования антенны РЛС - для дальнейшей обработки с целью определения дальности до РЛС, идентификацию сигналов и группировку импульсов в пачки сигналов. В блоке нормировки и запоминания пачечных сигналов 9 осуществляется нормировка сгруппированных пачек по амплитуде максимального в пачке импульса и запоминание времени прихода и нормированных амплитуд импульсов пачечных сигналов от пеленгатора и дополнительного приемного пункта. Блок определения времени запаздывания между пачками сигналов 10 и блок 11 вычисления СКО времени запаздывания и исключения промахов по правилу «Три сигма» выполняют операции, указанные выше в п.4 при описании осуществления способа определения дальности до излучающей обзорной РЛС. Блок определения угла поворота антенны РЛС 12 и блок вычисления дальности до РЛС 13 выполняют операции п.п.5 и 6 описания рассматриваемого способа определения дальности, устройство 14 отображает местоположение обнаруженной РЛС по найденному пеленгу и дальности.
На фиг.5 представлены результаты моделирования, подтверждающие достижимость технического результата изобретения, а именно возможность определения дальности до излучающей антенны обзорной РЛС при наличии на объекте-носителе радиопеленгатора также дополнительного приемного пункта, антенна которого образует с антенной пеленгатора измерительную базу, существенно меньшую по размерам, чем при триангуляционном способе измерения дальности (фиг.6).
Результаты получены для дальности 100 км до обзорной РЛС навигационного типа с параметрами:
- ширина антенного луча в горизонтальной плоскости 1.4°;
- скорость кругового обзора 20 об/мин;
- частота повторения импульсов 900 Гц.
При определении дальности триангуляционным способом использовались пеленгаторы со среднеквадратической ошибкой пеленгования 1.5°.
Другой технический результат изобретения - улучшение точности определения дальности, представлен результатами статистической обработки вычисленных величин Δti, по правилу «Три сигма» с последующим повторным вычислением tзап, β и дальности до РЛС, что иллюстрируется фиг.5, кривая 2.
Третий технический результат может быть реализован на одном радиопеленгаторе, т.е. с уменьшенным аппаратным составом на одном движущемся носителе радиопеленгатора.
Таким образом, за счет введения операций:
- нормирования по амплитуде пачечных сигналов, обнаруженных пеленгатором и дополнительным приемным пунктом;
- расчета по измеренным временным и нормированным амплитудным характеристикам пачек сигналов времени запаздывания между пачками сигналов;
- определения угла поворота антенны РЛС, соответствующего данной измерительной базе и дальности до РЛС;
- вычисления дальности до РЛС как отношение проекции измерительной базы на плоскость фронта приходящих сигналов от РЛС к углу поворота антенны РЛС, выраженному в радианах,
удается решить поставленную задачу с достижением технического результата.
Источники информации
1. B.C.Кондратьев, А.Ф.Котов, Л.Н.Марков. Многоканальные радиотехнические системы. - М.: «Радио и связь», 1986.
2. Патент №2096800 «Дальномерный способ определения местоположения радиостанций по разности прихода радиосигнала во времени в пункты приема». МПК7: G01S 5/02 (аналог).
3. Патент №2058563 «Устройство определения расстояния и направления до источника радиоизлучения». МПК7: G01S 5/12.
4. Патент №2073380 «Многопозиционная система определения местоположения объектов». МПК7: G01S 5/00, 5/04 (прототип).
5. Теоретические основы радиолокации. Под редакцией Я.Д.Ширмана. - М.: «Советское радио», 1970.
6. Е.С.Вентцель. Теория вероятностей. - М.: «Наука», 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2020 |
|
RU2758832C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПАССИВНЫМ МОНОСТАТИЧЕСКИМ ПЕЛЕНГАТОРОМ | 2014 |
|
RU2557808C1 |
| Способ определения местоположения обзорной РЛС пассивным пеленгатором | 2018 |
|
RU2741331C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2015 |
|
RU2580933C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С НАПРАВЛЕННОЙ АНТЕННОЙ | 2010 |
|
RU2444749C1 |
| Способ определения местоположения работающей РЛС пассивным многолучевым пеленгатором | 2019 |
|
RU2741333C1 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2016 |
|
RU2633962C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ И ПАССИВНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, ИСПОЛЬЗУЕМАЯ ПРИ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2004 |
|
RU2275649C2 |
| Радиолокационный способ обнаружения малозаметных целей в импульсно-доплеровской РЛС с ФАР | 2019 |
|
RU2711115C1 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы и устройство для его реализации | 2023 |
|
RU2826616C1 |

Изобретение относится к радиотехнике, а именно к пассивной радиолокации, и может быть использовано в системах радиоконтроля при решении задачи скрытного определения координат объектов-носителей обзорных РЛС, работающих на излучение. Достигаемым техническим результатом изобретения является возможность определения дальности до излучающей антенны обзорной РЛС при наличии на объекте-носителе радиопеленгатора дополнительного приемного пункта, антенна которого образует с антенной пеленгатора измерительную базу, существенно меньшую по размерам, чем при реализации традиционного триангуляционного способа определения дальности. Определение дальности до излучающей антенны обзорной РЛС достигается путем измерения интервала времени прохождения сканирующего луча антенны РЛС по измерительной базе при известном измеренном периоде сканирования (обзора) РЛС. 1 з.п. ф-лы, 6 ил.
1. Способ определения дальности до излучающей обзорной радиолокационной станции, включающий обнаружение и пеленгование сигналов радиолокационных станций (РЛС) радиопеленгатором, измерение параметров сигналов РЛС, в том числе времени прихода отдельных импульсов и их амплитуд, пачечных сигналов и периода сканирования антенны РЛС, обнаружение сигналов дополнительным приемным пунктом, антенна которого образует с антенной пеленгатора измерительную базу, или дополнительным приемным пунктом, измерительную базу которого образуют за счет перемещения носителя радиопеленгатора, измерение параметров сигналов и их идентификация с сигналами, обнаруженными пеленгатором, отличающийся тем, что пачечные сигналы обнаруженные пеленгатором и дополнительным приемным пунктом нормируют по амплитуде и запоминают, по измеренным временным и нормированным амплитудным характеристикам пачек сигналов рассчитывают обусловленное проходом сканирующего луча антенны РЛС по измерительной базе время запаздывания между пачками сигналов как среднее значение временного интервала, который вычисляется в каждом периоде повторения сигналов РЛС как отношение разности времен прихода текущего и предыдущего импульсов одной пачки к разности их нормированных амплитуд, умноженное на разность нормированных амплитуд текущих импульсов обеих пачек сигналов, по найденному времени запаздывания между пачками сигналов и измеренному ранее периоду сканирования антенны РЛС определяют угол поворота антенны РЛС, соответствующий данной измерительной базе и дальности до РЛС, и вычисляют дальность до РЛС как отношение проекции измерительной базы на плоскость фронта приходящих сигналов от РЛС к углу поворота антенны РЛС, выраженному в радианах, при этом в случае установления промахов в определении дальности исключают их и повторяют вычисление времени запаздывания между пачками сигналов, угла поворота антенны РЛС и дальности до РЛС.
2. Способ по п.1, отличающийся тем, что промахи в определении дальности определяются по правилу «три сигма» путем вычитания рассчитанного времени запаздывания между пачками сигналов из каждого временного интервала, вычисленного в каждом периоде повторения сигналов РЛС, определения дисперсии и среднеквадратического отклонения времени запаздывания между пачками.
| Теоретические основы радиолокации./ Под ред | |||
| Я.Д | |||
| ШИРМАНА | |||
| - М.: Советское радио, 1970, с.496 | |||
| СПОСОБ РАДИОПЕЛЕНГОВАНИЯ И РАДИОПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2303274C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И СКОРОСТИ СБЛИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С НИМ | 2003 |
|
RU2251709C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2217773C2 |
| US 2008260019 A1, 23.10.2008 | |||
| EP 2000823 A1, 10.12.2008 | |||
| CN 101153911 A, 02.04.2008. | |||

