Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения средств обнаружения (СО) с протяженной обрывной линейной частью (ПОЛЧ).
Для увеличения вероятности обнаружения нарушителя широко используются СО с ПОЛЧ, позволяющие контролировать участки местности протяженностью до 1-1,5 км [1-3]. При такой значительной протяженности охраняемого рубежа успех задержания нарушителя зависит не только от обнаружения его на местности, но и от точности указания места нарушения. Однако у СО с ПОЛЧ минимально возможная точность указания места нарушения - вся длина развернутой ПОЛЧ. Поэтому при поступлении сигнала тревоги от СО необходимо проверить всю ПОЛЧ до нахождения места обрыва [2, 3].
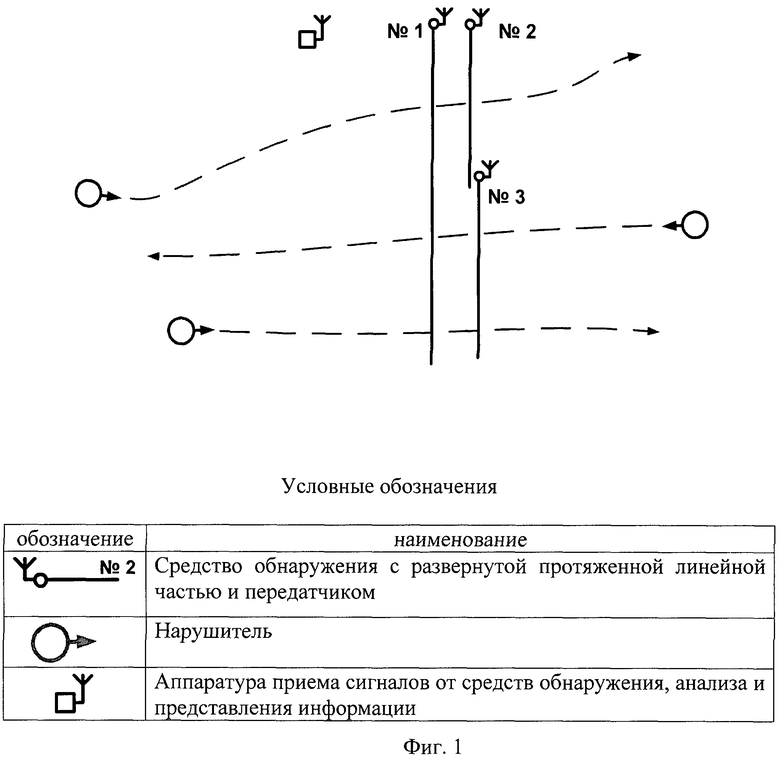
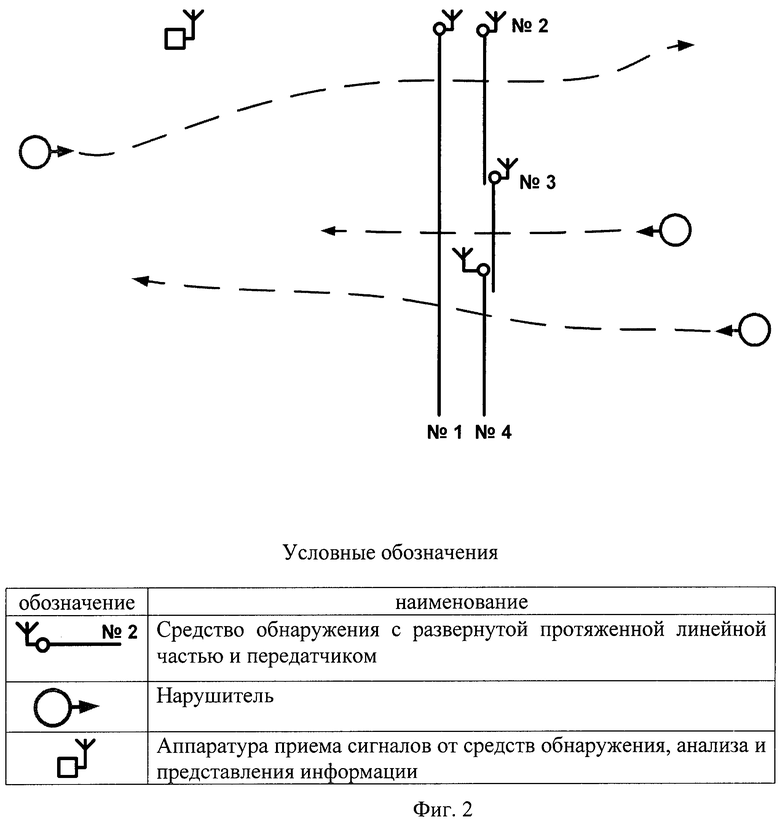
Известен способ определения места нарушения сигнализационного рубежа, заключающийся в развертывании одного СО на всю длину рубежа охраны и параллельно ему на удалении до нескольких десятков метров дополнительных СО на каждом из участков (фиг.1, 2) [2]. Участок нарушения определяется по номерам СО, выдавших сигнал тревоги. Как правило, рубеж разбивается на два или три участка, поэтому общее число разворачиваемых средств обнаружения три или четыре (фиг.1, 2).
Недостатком этого способа является необходимость развертывания дополнительных СО на каждом из участков сигнализационного рубежа.
Целью изобретения является повышение точности определения места нарушения сигнализационного рубежа.
Для достижения поставленной цели разработан способ определения места нарушения сигнализационного рубежа, заключающийся в определении участка нарушения сигнализационного рубежа посредством регистрации временного интервала задержки между последовательным поступлением сигналов тревоги и последующего установления его принадлежности к одному из трех непересекающихся между собой диапазонов временных интервалов, определяемых геометрическими размерами рубежа и диапазоном возможных скоростей нарушителя.
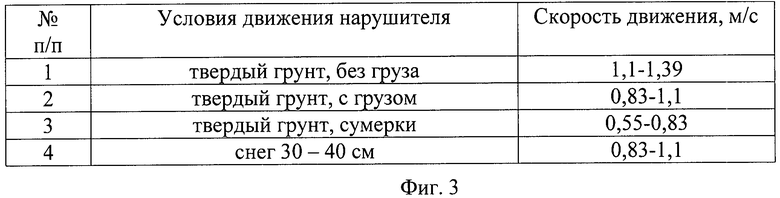
Пеший нарушитель движется со скоростью, пределы которой зависят от условий местности (фиг.3). При этом отношение верхнего значения скорости (Vmax) к нижнему (Vmin) лежит в пределах 1,5…2,0 [4-6]:
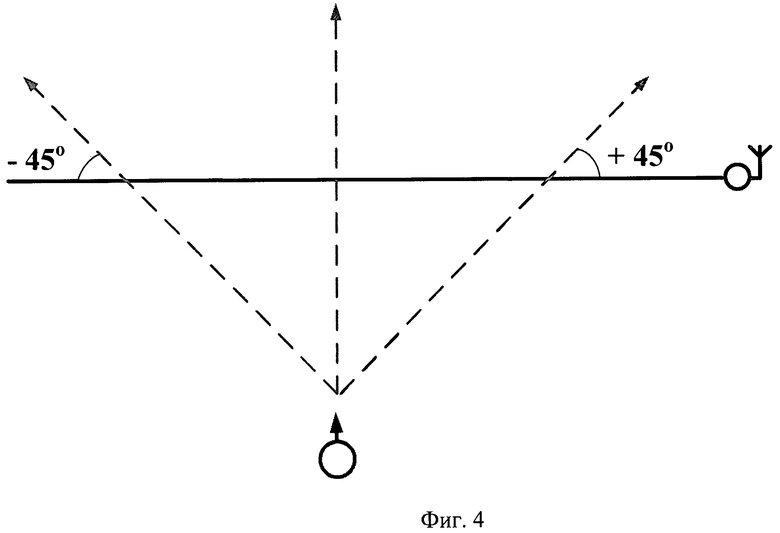
Угол пересечения нарушителем сигнализационного рубежа (ω) лежит в пределах ±45° от перпендикулярного пересечения (фиг.4). Пределы скоростей нарушителя и угол пересечения им сигнализационного рубежа определены практически, известны и подтверждены на основе статистических исследований [4-6].
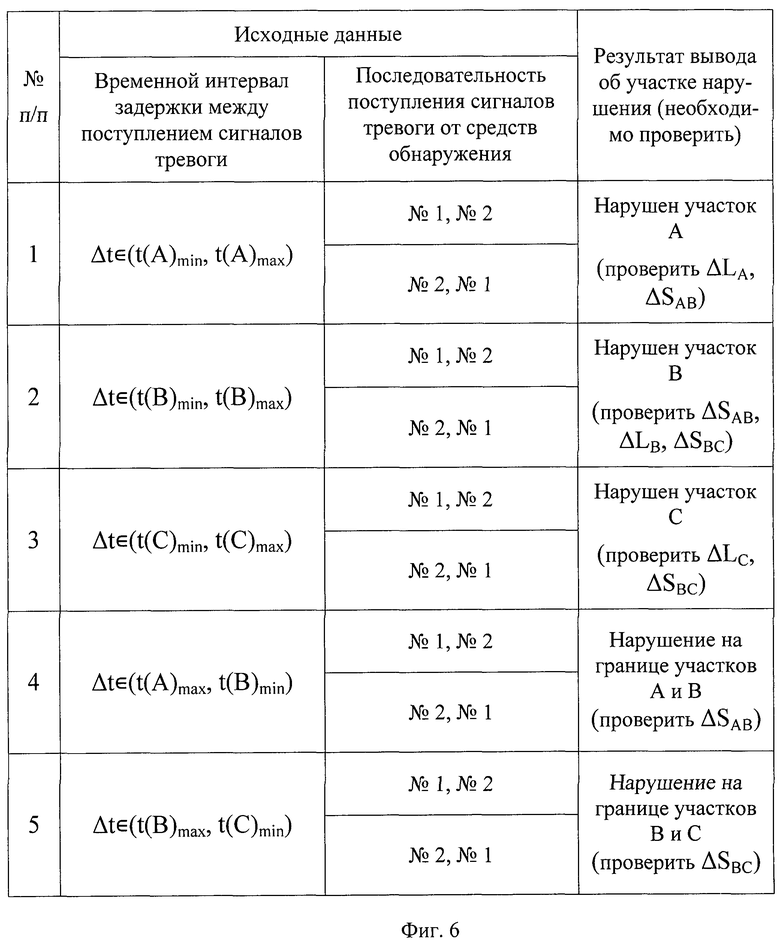
С учетом этих параметров движения нарушителя при развертывании ПОЛЧ двух СО образуемый ими сигнализационный рубеж разбивается на три условных участка («А», «В», «С») таким образом, чтобы расстояния между ПОЛЧ первого СО, развернутой в линию, и ПОЛЧ второго СО, развернутой по ступенчатой структуре, от участка к участку менялось скачками (фиг.5). Длина каждого участка составляет треть от всей протяженности рубежа. При пересечении нарушителем сигнализационного рубежа участок, на котором произошло нарушение, определяется по значению измеренного временного интервала задержки между поступлением сигналов тревоги от СО (фиг.6):
где t(A)min, t(B)min, t(C)min - минимально возможное время, затрачиваемое нарушителем на преодоление участка «А», «B» и «C» соответственно, с;
t(A)max, t(B)max, t(C)max - максимально возможное время, затрачиваемое нарушителем на преодоление участка «А», «B» и «С» соответственно, с;
ΔtA, ΔtB, ΔtC - временные интервалы задержки между поступлением сигналов тревоги для участков «А», «В» и «С» соответственно, с.
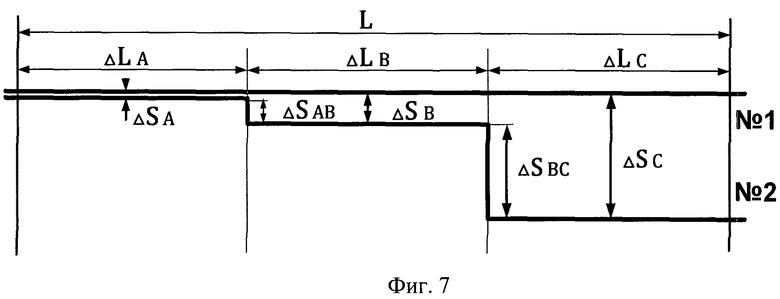
Параметры сигнализационного рубежа рассчитываются из условия, что минимально возможное время, затрачиваемое нарушителем на преодоление большего индивидуального расстояния между ПОЛЧ одного участка, превышало максимально возможное время, затрачиваемое на преодоление меньшего индивидуального расстояния между ПОЛЧ соседнего участка (фиг.7):

где ΔSA, ΔSB, ΔSC - индивидуальные расстояния между ПОЛЧ на участках, м.
Непересечение этих временных интервалов задержки между поступлением сигналов тревоги от СО с учетом возможного диапазона скоростей нарушителя и пересечения им рубежа под углом (ω) выполняется при условии [7]:

где ω - угол максимального отклонения от перпендикулярного направления пересечения рубежа нарушителем, град.;
Vmax, Vmin - верхний и нижний пределы скоростей нарушителя, м/с.
С учетом возможного двукратного превышения максимальной скорости нарушителя (Vmax) над минимальной (Vmin) и максимального угла пересечения им сигнализационного рубежа (ω=+45°) отношение индивидуальных расстояний между ПОЛЧ соседних участков должно быть:

Для исключения ошибки определения аппаратурой приема сигналов, анализа и представления информации очередности поступления сигналов от СО расстояние между двумя ПОЛЧ на участке A (Smin) должно быть в два раза больше расстояния, проходимого нарушителем за одну секунду [1, 3]:

Тогда параметры сигнализационного рубежа рассчитываются (фиг.7):
где ΔLA, ΔLB, ΔLC - протяженность участков «А», «В» и «С», соответственно, м;
L - общая протяженность сигнализационного рубежа, м.
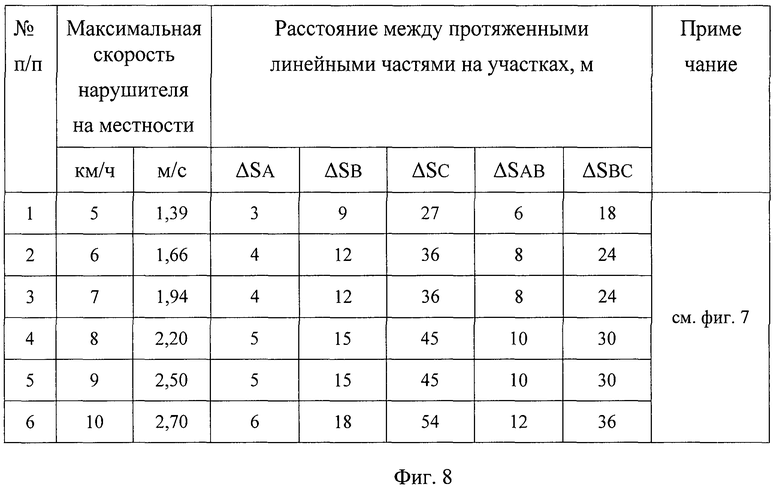
С учетом максимально возможной скорости нарушителя на конкретном участке местности параметры сигнализационного рубежа могут иметь значения, указанные в таблице (фиг.8). Предельные значения временного интервала t(N)min и t(N)max задержки между поступлением сигналов тревоги, по которым определяются нарушенные участки, рассчитываются с учетом индивидуальных расстояний между ПОЛЧ на участках ΔSA, ΔSB и ΔSC, верхнего и нижнего значений скоростей (Vmin, Vmax) нарушителя на конкретном участке местности и возможных углов (ω) пересечения сигнализационного рубежа [7]:
Для участка «А» предельные значения временного интервала задержки между поступлением сигналов тревоги рассчитываются по формуле (фиг.6):
Для участка «В» предельные значения временного интервала задержки между поступлением сигналов тревоги рассчитываются по формуле
Для участка «С» предельные значения временного интервала задержки между поступлением сигналов тревоги рассчитываются по формуле
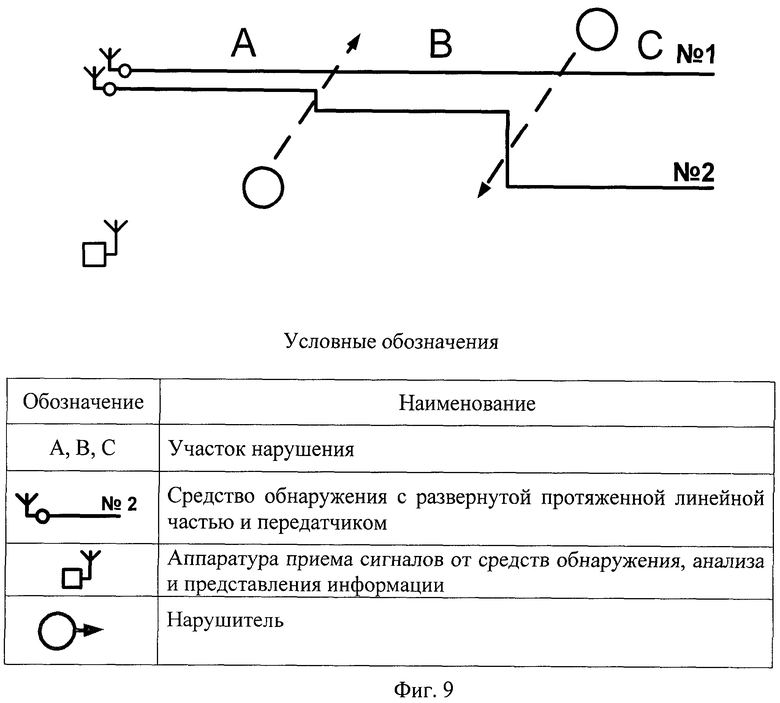
Нарушитель не всегда может нарушить сигнализационный рубеж в пределах одного участка (фиг.9). Так, он может пересечь ПОЛЧ №2 на границе участков А и В (ΔSAB) или В и С (ΔSBC) (фиг.7). Тогда измеренные временные интервалы задержки могут лежать в пределах:

В этом случае, при проверке ПОЛЧ необходимо осмотреть ΔSAB ΔSBC (фиг.6, пункты 4, 5).
Нарушитель может пересечь ПОЛЧ №2 на границе участков А и В или В и С, при этом измеренные временные интервалы задержки могут лежать в пределах, принадлежащих этим участкам (ΔtA, ΔtB, ΔtC). Поэтому при проверке ПОЛЧ необходимо осмотреть не только сам участок А(ΔLA), В(ΔLB), С(ΔLC), но и ΔSAB или ΔSBC (фиг.6, пункты 1-3).
Способ включает два этапа: подготовительный и основной.
Подготовительный этап
1. Выбор участка для развертывания СО, определение возможных пределов скоростей движения нарушителя с учетом условий местности (фиг.3).
2. Расчет параметров рубежа по формуле (7) (фиг.7, 8).
3. Развертывание на местности поперек направления движения нарушителя ПОЛЧ двух СО с передатчиками, аппаратуры приема сигналов от СО, анализа и представления информации (АПАПИ) (фиг.5, 7, 9).
4. Построение таблицы принятия решения об участке, на котором произошло нарушение, формулы (9-11) (фиг.6).
Основной этап начинается при пересечении нарушителем сигнализационного рубежа и включает следующее.
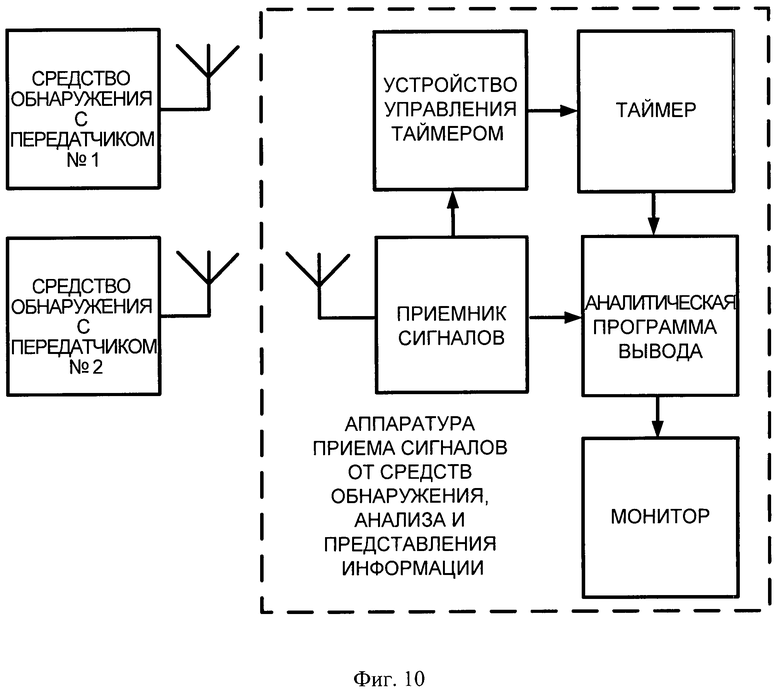
1. Регистрацию сигнала тревоги от СО №1 (№2), передачу его на АПАПИ и начало отсчета временного интервала At таймером (фиг.10).
2. Регистрацию сигнала тревоги от СО №2 (№1), передачу его на АПАПИ, остановку работы таймера и определение временного интервала Δt задержки между поступлением сигналов тревоги.
3. Определение АПАПИ места нарушения сигнализационного рубежа по полученному временному интервалу At в соответствии с таблицей принятия решения об участке, на котором произошло нарушение (фиг.6) (формулы 9-12).
4. Проверку участка сигнализационного рубежа в соответствии с таблицей принятия решения об участке, на котором произошло нарушение (фиг.6).
Сущность изобретения поясняется графическими материалами, где на
- фиг.1 представлена схема известного способа определения места нарушения сигнализационного рубежа с применением трех СО;
- фиг.2 - схема известного способа определения места нарушения сигнализационного рубежа с применением четырех СО;
- фиг.3 - таблица диапазонов скоростей нарушителя на различных участках местности;
- фиг.4 - схема возможного сектора движения нарушителя при пересечении сигнализационного рубежа;
- фиг.5 - схема, поясняющая предлагаемый способ определения места нарушения сигнализационного рубежа;
фиг.6 - таблица принятия решения об участке, на котором произошло нарушение;
- фиг.7 - схема сигнализационного рубежа для трех участков;
- фиг.8 - таблица вариантов значений параметров сигнализационного рубежа;
- фиг.9 - схема, показывающая возможное движение нарушителя с пересечением ПОЛЧ №2 на границе участков;
- фиг.10 - структурная схема сбора, анализа и отображения информации по радиоканалу.
Технический результат состоит в повышении точности указания места нарушения сигнализационного рубежа в 3 раза с применением только двух средств обнаружения с протяженной обрывной линейной частью без развертывания дополнительных средств обнаружения.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Магауенов Р.Г. Системы охранной сигнализации: основы теории и принципы построения: Уч. пособие. - М.: Горячая - Телеком, 2004. - 367 с.
2. Коршняков В.Г. Сигнализационные средства охраны локальных участков: Уч. пособие. - Калининград: КПИ ФСБ РФ, 2004. - 135 с.
3. Прибор сигнализационный обрывного типа «Графит»: Паспорт и инструкция по эксплуатации ЮСДП.425112.001 ПС. - Пенза, 2003. - 19 с.
4. Псарев А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
5. Баленко С.В. Школа выживания. - М.: 1994. - 140 с.
6. Шумов В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Науч.-практич. пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
7. Справочник по элементарной математике/ Под ред. М.Я.Ворновицкого. - М.: Наука, 1964. - 420 с.
Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения средств обнаружения (СО) с протяженной обрывной линейной частью (ПОЛЧ). Технический результат заключается в повышении точности определения места нарушения сигнализационного рубежа. Способ заключается в развертывании ПОЛЧ двух СО как единого сигнализационного рубежа с последующим определением участка нарушения сигнализационного рубежа посредством регистрации временного интервала задержки между последовательным поступлением сигналов тревоги и установления его принадлежности к одному из трех непересекающихся между собой диапазонов временных интервалов, определяемых геометрическими размерами рубежа и диапазоном возможных скоростей нарушителя. Способ включает подготовительный этап с развертыванием ПОЛЧ двух СО при построении сигнализационного рубежа, условно разбиваемого на три участка, и с конфигурацией, обеспечивающей трехкратную разницу в отношении расстояний между ПОЛЧ на соседних участках, и основной этап, который начинается с момента пересечения нарушителем сигнализационного рубежа. В ходе основного этапа регистрируется временной интервал задержки между поочередным поступлением сигналов тревоги от СО и определяется участок нарушения по алгоритму, сравнивающему полученный временной интервал с тремя непересекающимися между собой диапазонами временных интервалов, рассчитанными аналитически для каждого из участков, с учетом возможного диапазона скоростей нарушителя на данной местности и индивидуальных расстояний между ПОЛЧ на этих участках. Таким образом, достигается повышение точности указания места нарушения сигнализационного рубежа в 3 раза с применением только двух средств обнаружения без развертывания дополнительных средств обнаружения. 10 ил.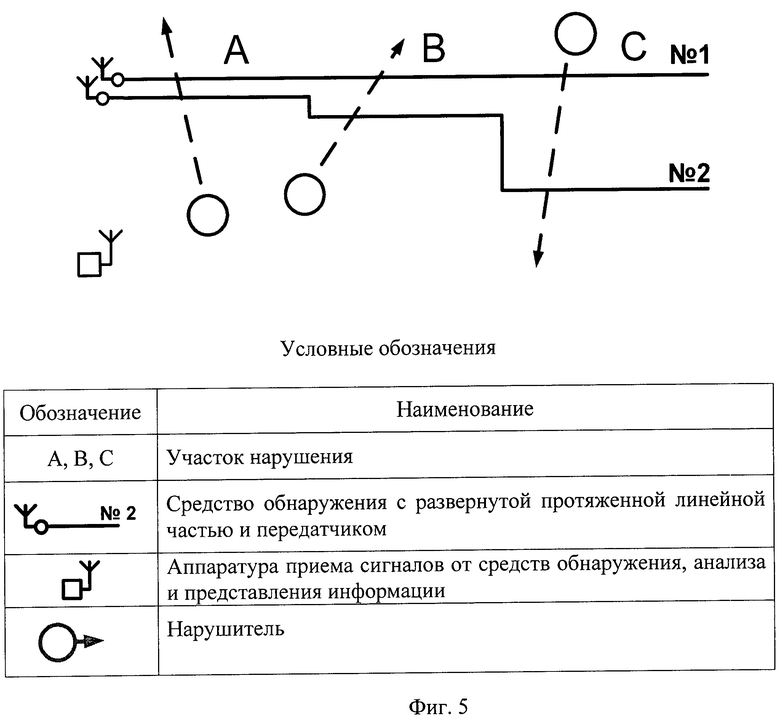
Способ определения места нарушения сигнализационного рубежа, заключающийся в контроле местности несколькими средствами обнаружения с протяженной обрывной линейной частью, отличающийся тем, что при конструктивном выполнении сигнализационного рубежа применяются только два средства обнаружения, при этом он разбивается на три условных участка так, чтобы расстояния между линейной частью первого средства обнаружения, развернутой в линию, и линейной частью второго средства обнаружения, развернутой по ступенчатой структуре, от одного участка к другому менялось скачком с увеличением в три раза, сам участок нарушения определяется алгоритмом, устанавливающим принадлежность полученного временного интервала задержки между поочередным поступлением сигналов тревоги от средств обнаружения к одному из трех непересекающихся между собой диапазонов временных интервалов, рассчитанных аналитически для каждого из участков, с учетом возможного диапазона скоростей нарушителя на данной местности и индивидуальных расстояний между обрывными линейными частями на этих участках.
| Блок с винтовыми распорными держателями для установки и крепления стереотипных пластин в печатной форме | 1952 |
|
SU96274A1 |
| Плитка из пластмассы для крепления игл и платин | 1953 |
|
SU96273A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ЭЛЕКТРОПРОВОДЯЩИХ ОБЪЕКТОВ | 2005 |
|
RU2303290C2 |
| УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 1982 |
|
SU1834552A1 |
| УСТРОЙСТВО ДЛЯ РАСПРЕДЕЛЕНИЯ СЕМЯН В ШАХМАТНОМ ПОРЯДКЕ | 1993 |
|
RU2074602C1 |
| JP 10162259 A, 19.06.1998 | |||

