Изобретение относится к измерительной технике, а именно к оптико-электронным устройствам для бесконтактного измерения отклонения поверхности длинных узких объектов от прямолинейного на заданном отрезке и может быть использовано для контроля прямолинейности поверхности катания рельса.
Известно устройство для контроля прямолинейности направляющих рельсов (а.с. N 1482844, В 61 К 9/08, E 01 В 35/10, СССР). Устройство содержит приемопередатчик светового излучения, оптически связанный с телеуправляемой платформой, зеркало, коллиматор, подвижную платформу, анализатор смещения пути и регистратор.
Известно также устройство для контроля прямолинейности рельсовых путей (а. с. N 1576616, E 01 В 35/40, G 01 В 11/30, СССР). Устройство содержит излучатель на подвижной платформе, анализатор прямолинейности, приемник, пульт управления, регистратор и вычислительное устройство.
Ближайшим из известных является устройство для контроля прямолинейности поверхности (заявка N 3-49362, G 01 B 11/24, Япония). Устройство содержит источник оптического излучения, формирующий несколько параллельных световых пучков, последовательно установленные по ходу излучения подставку с гладкой поверхностью для измеряемого объекта, расположенного перпендикулярно излучени. , образцовый элемент, расположенный параллельно измеряемому объекту, и приемник, регистрирующий прошедшее излучение, выход которого соединен с входом операционного блока. Однако данное устройство не позволяет решить задачу контроля прямолинейности большого числа протяженных объектов в процессе их поступательного перемещения, например, на транспортном рольганге.
Предлагаемое устройство, так же как и известное, содержит источник оптического излучения, последовательно установленные по ходу излучения подставку для измеряемого объекта, расположенного перпендикулярно излучению, образцовый элемент, расположенный параллельно измеряемому объекту, и приемник, регистрирующий излучение, выход которого подключен к входу операционного блока.
В отличие от известного, в предлагаемом устройстве контроля прямолинейности поверхности подставка выполнена в виде опор с механизмом поступательного (линейного) перемещения измеряемого объекта, источник оптического излучения выполнен в виде нескольких, объединенных в три группы передатчиков, каждый из которых формирует один световой пучок, параллельный пучкам других источников, при этом приемник выполнен в виде нескольких блоков, установленных с возможностью регистрации каждым из них одного светового пучка, образцовый элемент выполнен в виде верхнего и нижнего ножей, образующих щель, а результат измерений прямолинейности поверхности определяется в зоне второй группы передатчиков из соотношения
где Y1, Y2, Y3 - усредненные координаты объекта по результатам измерений в зоне I, II, III групп передатчиков
λ = L1/L2 - геометрический фактор;
L1 - расстояние от I группы передатчиков до II группы;
L2 - расстояние от II группы передатчиков до III группы
Расстояние L между первой и третьей группой передатчиков задает отрезок, на котором требуется обнаружить непрямолинейность.
В процессе транспортировки объекта возникают случайные смещения объекта, что может быть вызвано рядом факторов, например, особенностью транспортного устройства (эксцентричность или износ валков рольганга, звуковыми колебаниями объекта и т.д.). Естественно, что таковые искажают результаты контроля. Использование алгоритма взаимодействия датчиков, описываемого соотношением (1), позволяет устранить действие этих факторов.
Минимально необходимое число передатчиков и приемников равно 3. Для устранения влияния высокочастотных вибраций и чистоты измеряемой поверхности на результаты измерений может быть произведено усреднением отсчетов Y1, Y2, Y3. Таковое выполняется путем соответствующего выбора оптической апертуры приемников и передатчиков. А также путем увеличения их числа до большего трех и соответствующего объединения в группы.
Таким образом, результат совокупного применения отличительных признаков предложенного решения позволяет обеспечить устойчивость результата измерений к случайным смещениям, высокочастотным вибрациям и чистоте контролируемой поверхности.
На чертеже изображена функциональная схема устройства для контроля прямолинейности поверхности катания рельса при прохождении его по рольгангу в положении лежа на подошве.
Устройство состоит из следующих составных частей: измеряемого рельса 1, расположенного с возможностью поступательного движения на рольганге 2, валки которого выполняют роль опор подставки, трех источников оптического излучения - I, II, III, причем I и III источники установлены на расстоянии L1 + L2 = L = 1,5 м друг от друга. Каждый источник оптически и электрически связан с одним приемником, которые содержат в своем составе аналого-цифровой преобразователь (АЦП) для оцифровки фотометрического сигнала фотодиода приемника и локальный контроллер, для сбора и предварительной обработки информации, полученной с АЦП, и управления платой излучателя и верхнего 3 и нижнего 4 ножей, предназначенных для ограничения светового потока, проходящего от источника оптического излучения к приемнику, таким образом формирующих эталонный фотометрический сигнал и представляющих собой линейки с прямолинейным краем, операционного блока, который осуществляет сбор информации со всех приемников и выдает результат измерений.
Устройство работает следующим образом. Перед измерением каждого нового рельса по команде операционного блока 5 осуществляется автоматическая калибровка каждого приемника. Процедура калибровки выглядит следующим образом. Световой поток от каждого источника I, II, III в отсутствии рельса 1 ограничен верхним 3 и нижним 4 ножами. Расстояние между ними выбрано Y0 = 25 мм. Световой поток от источников I, II, III, соответствующий калибрующему зазору, попадая в приемники I, II, III, преобразуется фотодиодами приемников в фототок, а затем с помощью встроенных в них АЦП - в цифровой код.
Путем совместной работы АЦП и локального контроллера, встроенного в каждый приемник, оптимизируется режим усиления фототока в каждом приемнике под максимальную емкость АЦП и вырабатывается цифровой сигнал N0(i), где i = 1, 2, 3 номер приемника светового излучения.
Собранная и предварительно обработанная информация передается в операционный блок 5, где вычисляется масштабный коэффициент Y0/N0(i). Наличие процедуры калибровки гарантирует выдачу приемником светового излучения текущей ординаты контролируемого рельса с одинаковой погрешностью в каждом приемнике, компенсируя до необходимого уровня влияние внешних факторов, например, запыленности, на работу каждого приемника.
При появлении контролируемого рельса 1 в измерительной зоне световой поток, ограниченный с одной стороны верхним ножом 3, а с другой - движущимся рельсом 1, оцифровывается каждой группой приемников I, II, III и передается в операционный блок 5. По полученным отсчетам N(i) рассчитываются ординаты поверхности катания рельса Y(i) = N(i) Y0/N0(i), которые используются в качестве исходной информации для расчета отклонений от прямолинейности поверхности, который производит операционный блок 5.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРЯМОЛИНЕЙНОСТИ РЕЛЬСОВ | 1998 |
|
RU2151705C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРЯМОЛИНЕЙНОСТИ РЕЛЬСОВ | 2004 |
|
RU2283792C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ ЗЕРКАЛА РАСПЛАВЛЕННОГО МЕТАЛЛА | 1993 |
|
RU2064660C1 |
| СПОСОБ КОНТРОЛЯ НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ В БЛОЧНЫХ СТРУКТУРАХ ГЕОСФЕРЫ, БАЗОВАЯ ОПОРА, ДЕФОРМОМЕТР И РЕГИСТРАТОР | 1995 |
|
RU2097558C1 |
| ФОТОБАРЬЕРНЫЙ ДАТЧИК | 1995 |
|
RU2107258C1 |
| СПОСОБ ТЕРМИЧЕСКОЙ ОБРАБОТКИ ИЗДЕЛИЙ | 1994 |
|
RU2081191C1 |
| СПОСОБ РАЗДЕЛЕНИЯ ПРОКАТА ПРЕИМУЩЕСТВЕННО СКРАПА ДЛИННОМЕРНОГО ПРОФИЛЯ НА ЧАСТИ | 1995 |
|
RU2082565C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПЛОЩАДИ | 1995 |
|
RU2082950C1 |
| СПОСОБ ПРОКАТКИ РЕЛЬСОВ | 2001 |
|
RU2223156C2 |
| СПОСОБ КОНТРОЛЯ ГЕОМЕТРИИ РЕЛЬСА | 2008 |
|
RU2394206C2 |
Устройство для контроля прямолинейности поверхности может быть использовано для бесконтактного измерения отклонения поверхности длинных узких объектов от прямолинейного на заданном отрезке в потоке. Устройство для контроля прямолинейности поверхности содержит по меньшей мере три источника оптического излучения, установленные на расстоянии 1,5 м друг от друга, каждый из которых оптически связан с одним из приемников, подставку для измеряемого рельса, выполненную в виде опор с механизмом поступательного перемещения измеряемого рельса, верхний и нижний ножи для ограничения светового потока, проходящего от источников оптического излучения к соответствующим приемникам и для формирования эталонного фотометрического сигнала при калибровке каждого датчика. При появлении измеряемого рельса в зоне контроля в операционном блоке сигналы приемников обрабатываются и рассчитываются ординаты поверхности катания рельса, которые и используются в качестве исходной информации для расчета отклонений от прямолинейности поверхности, который производит операционный блок. Изобретение позволяет решить задачу контроля прямолинейности большого числа протяженных объектов в процессе их поступательного перемещения, например на транспортном рольганге. 1 ил.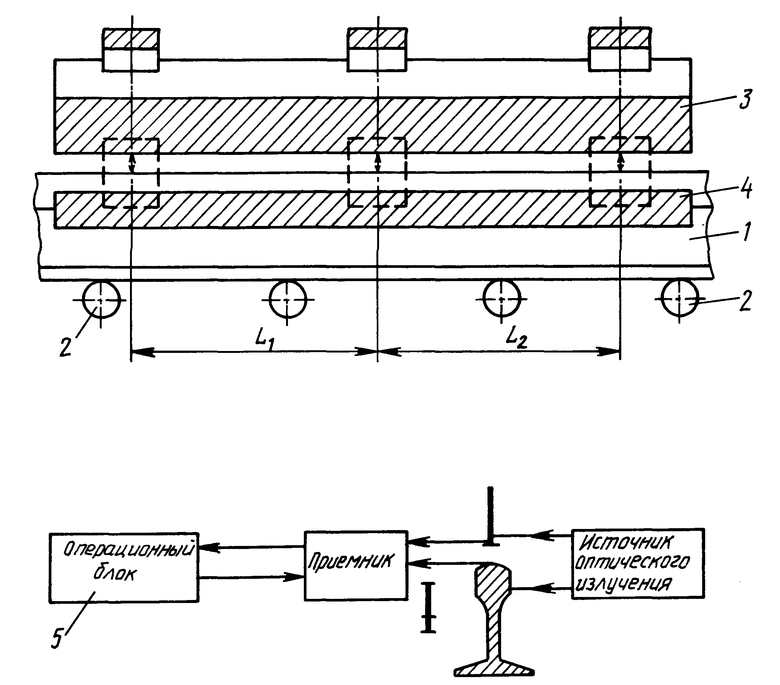
Устройство для контроля прямолинейности поверхности, содержащее источник оптического излучения, последовательно установленные по ходу излучения подставку для измеряемого объекта, расположенного перпендикулярно излучению, образцовый элемент, приемник для регистрации оптического излучения, выход которого подключен к входу операционного блока, отличающееся тем, что подставка для измеряемого объекта выполнена в виде опор с механизмами поступательного перемещения измеряемого объекта, источник оптического излучения - в виде нескольких объединенных в три группы передатчиков, каждый из которых формирует один световой пучок, параллельный пучкам других источников, при этом приемник выполнен в виде нескольких блоков, установленных с возможностью регистрации каждым из них одного светового пучка, образцовый элемент выполнен в виде верхнего и нижнего ножей, расположенных с образованием щели, а операционный блок выполнен с возможностью расчета отклонений от прямолинейности поверхности в зоне второй группы по формуле
где Y1, Y2, Y3 - усредненные координаты объекта по результатам измерений в зоне первой, второй и третьей групп передатчиков;
L1 - расстояние от первой группы передатчиков до второй группы передатчиков;
L2 - расстояние от второй группы передатчиков до третьей группы передатчиков.
| Устройство для контроля прямолинейности направляющих рельсов | 1987 |
|
SU1482844A1 |
| Устройство для контроля прямолинейности рельсовых путей | 1988 |
|
SU1576616A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
