Изобретение относится к области радиолокации и может быть использовано в радиолокаторах и оптических локаторах для ускоренного поиска и слежения за объектами. Известно устройство обработки радиолокационных сигналов, входящее в состав радиолокатора, изложенное в патенте №2337377 автора. В нем осуществляется определение дальности при увеличенной частоте зондирующих импульсов, используя определяемое значение направления. Запоминаются также направления излучения зондирующих импульсов. Дальность определяется с помощью узлов, представляющих из себя блок вычитания между текущим временем и временем излучения зондирующего импульса. Однако точность определения дальности не всегда достаточна. Известно устройство обработки радиолокационных сигналов, изложенное в патенте №2390037, автор Часовской А.А. В нем увеличивается точность определения дальности при увеличенной частоте излучения зондирующих импульсов. При этом с помощью пеленгационного приемного устройства и других узлов, представляющих из себя блок определения направления, определяется азимутальное положение объекта в процессе обзора пространства. В состав устройства также входит блок фиксации перемещения луча, который после поворота луча на определенную величину выдает импульсы как команды на излучение зондирующего импульса. Поэтому в этот блок может входить датчик азимутальных меток с минутным и секундным разрешением, который можно представлять как самостоятельный узел, выдающий минутные метки в блок фиксации, а секундные - в счетчик, представленный как блок счета времени. Информация с группы выхода счетчика поступает в вычитатель, представляющий из себя блок вычитания, где определяется дальность при положительной и отрицательной разности. При этом определяется разность между текущей информацией со счетчика и моментом изучения зондирующего импульса, и если разность отрицательная, то она определяется путем вычитания момента излучения зондирующего импульса из суммы максимальной и текущей информации со счетчика.
Однако для определения дальности необходимо использовать увеличенное количество информации о направлении, постоянное запоминающее устройство, что усложняет изделие, и с помощью предлагаемого устройства осуществляется упрощение изделия без уменьшения точности и величины определения дальности. Достигается это введением датчика направления излучения импульсов, блока вычитателей, блока дешифраторов, блока элементов совпадения, при этом первая и вторая группы входов и группа выходов блока вычитателей соответственно соединены с группой выходов датчика, направлений излучений импульсов, с группой выходов блока определения направления и через блок дешифраторов со второй группой входов блока элементов совпадения, имеющего первую группу входов и группу выходов, соответственно соединенные с группой выходов датчика направлений излучений импульсов и со второй группой входов блока вычитания.
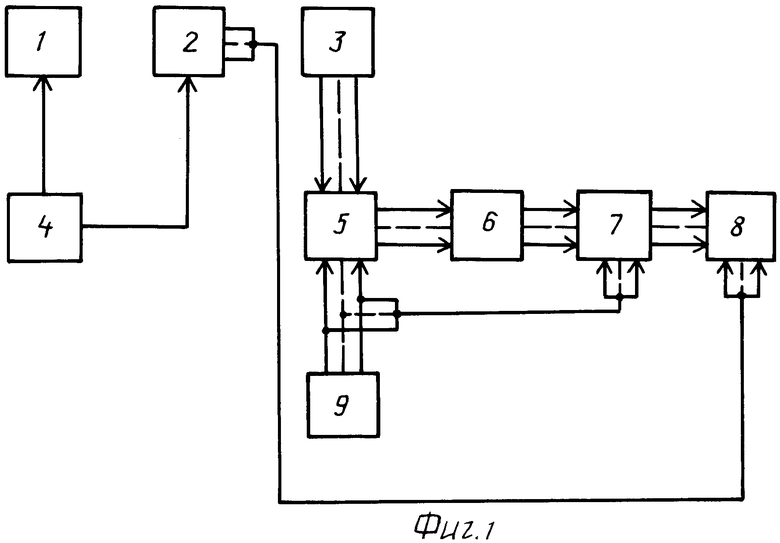
На фиг.1 и в тексте принять следующие обозначения:
1 - блок фиксации перемещения луча
2 - счетчик
3 - блок определения направления
4 - датчик азимутальных меток с минутным и секундным разрешением
5 - блок вычитателей
6 - блок дешифраторов
7 - блок элементов совпадения
8 - блок вычитания
9 - датчик направления излучения импульсов, при этом первая и вторая группы входов и группа выходов блока вычитателей 5 соответственно соединены с группой выходов датчика направлений излучения импульсов 9, с группой выходов блока определения направления 3 и через блок дешифраторов со второй группой входов блока элементов совпадения 7, имеющего первую группу входов и группу выходов, соответственно соединенные с группой выходов датчика направлений излучений импульсов 9 и со второй группой входов блока вычитания 8, имеющего первую группу входов, соединенную с группой выходов счетчика 2, вход которого соединен со вторым выходом датчика азимутальных меток с минутным и секундным разрешением 4, имеющий первый выход, соединенный с входом блока фиксации перемещения луча 1.
Работа устройства осуществляется следующим образом.
С помощью блока определения направления 3 определяется азимутальное направление объекта в процессе обзора пространства с увеличенной частотой следования зондирующих импульсов. Пример исполнения блока определения направления изложен в книге А.Н.Волжин и Ю.Г.Сизов «Борьба с самонаводящими ракетами» 1983. М., Военное изд., стр.35-39, а также в патенте автора №2390037. При этом направление на объект определяется моноимпульсным методом с помощью пересекающихся приемных диаграмм.
В блок фиксации перемещения луча 1 выдаются минутные метки с первого выхода датчика азимутальных меток с минутным и секундным разрешением 4. Блок фиксации 1 выдает импульсы как команды на излучение зондирующего импульса. Со второго выхода датчика 4 поступают в счетчик 2 секундные метки. Счетчик после определенного количества меток и зондирующих импульсов в период времени максимального запаздывания отраженного от объекта сигнала сам устанавливается в исходное состояние.
Таким образом, в период счета меток фиксируется определенное количество направлений излучений в количестве, например, от пяти до десяти, в зависимости от максимальной дальности обнаружения. После прихода отраженного от объекта сигнала информация о направлении на объект, определяемая моноимпульсным методом к блоке определения направления 3, с группы выходов этого блока поступает на вторую группу входов блока вычитателей 5, а на первую группу его входов одновременно поступают коды направлений излучений импульсов с датчика направлений излучения импульсов 9. В связи с этим разность на одном из вычитателей, количество которых равно количеству направлений излучений, будет иметь наименьшее значение. Разности с группы выходов блока вычитателей 5 поступают в группу входов блока дешифраторов 6, где соответствующий дешифратор зафиксирует минимальную разность и сработает. В результате десятичный код с группы выходов блока дешифраторов поступает на группу входов блока элементов совпадения 7, где соответствующему элементу совпадения будет выдано разрешение на прохождение через него кода направления с датчика 9.
Это код с группы выходов блока элементов совпадения 7 поступает на вторую группу входов блока вычитания 8, а на первую его группу входов поступает текущая угловая информация с секундным разрешением с группы выходов счетчика 2. Разность между этой текущей информацией и вышеупомянутым кодом направления с блока 7 при постоянной скорости вращения луча характеризует дальность до объекта. Однако, если разность в блоке вычитания 8 имеет отрицательное значение, то она в нем определяется путем вычитания кода направления из максимального направления положения луча со счетчика 2 с последующим суммированием разности с текущим направлением. Причем максимальное положение луча соответствует максимальному коду со счетчика перед его установкой в исходное состояние, а вышеупомянутая сумма предварительно определяется в блоке вычитателей 8, например, так как отмечено в патенте автора №2337377, бюл.30 от 27.10.08 г.
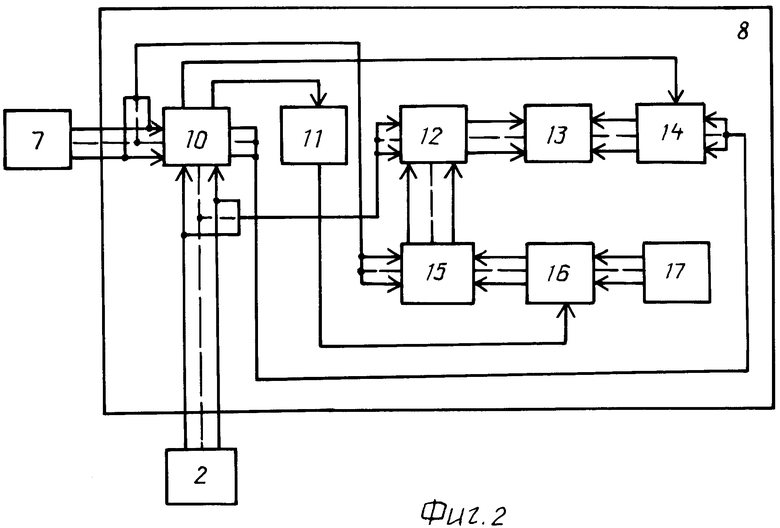
На фиг.2 указан пример исполнения блока вычитания 8, где приняты следующие обозначения:
10 - вычитатель
11 - инвертор
12 - сумматор
13 - блок элементов или
14 - блок элементов совпадения
15 - вычитатель
16 - блок элементов совпадения
17 - датчик кода.
Вычитатель 10 определяет разность между текущей информацией со счетчика 2 и кодом направления излучения зондирующего импульса с блока элементов совпадения 7. В случае положительной разности вычитатель 10 выдает признак положительной разности в блок элементов совпадения 14, разрешая прохождение кода с вычитателя 10 в блок элементов, или 13. В случае отрицательной разности вычитатель 10 выдает отрицательный признак разности в инвертор 11. Последний сработает и даст разрешение блоку элементов совпадения 16 на прохождение через него информации о максимальном направлении на счетчике 2 с датчика кода 17 в вычитатель 15, где из этого максимального направления вычитается код с блока элементов совпадения 7, и разность поступает в сумматор 12, где складывается с кодом текущего направления со счетчика 2, и сумма поступает на другую группу входов блока элементов, или 13.
Информация о дальности с блока вычитания 8 может быть использована для дальнейшей обработки.
При использовании фазированной антенной решетки в качестве блока фиксации перемещения луча можно использовать блок фазирования, а в качестве датчика азимутальных меток - тактовый генератор.
Приведем пример конкретного исполнения. Пусть луч совершает круговой обзор пространства, используя фазированную антенную решетку. Синхронно с передающим лучом сканирует зона пересекающихся приемных диаграмм направленности. Ширина луча по азимуту 0,5 градуса, а по углу места - 5 градусов, ширина зоны приемных пересекающихся диаграмм 4 градуса при максимальной дальности обнаружения 300 км. Это обеспечивает время кругового обзора 180 мс. После каждого поворота луча излучается один импульс. Частота излучения зондирующих импульсов и сканирования 4 кГц.
Количество запоминаемых направлений излучения - восемь. Направление определяется моноимпульсным методом. Разрешающая способность его по его азимуту 5 минут. Точность определения дальности при равномерном сканировании и частоте секундных меток 20 мГц составляет 20 метров.
Несмотря на восьмикратное увеличение частоты, может сохраниться мощность излучения благодаря осуществлению подбора параметров зарядной цепи в передающем устройстве. При этом существенно не увеличивается громоздкость, а только величина потребляемой энергии. Это отмечено в книге «Радиотехнические устройства и элементы радиосистем» В.А.Коплун и др. М., Высшая школа, 2005 г., стр.150-151. Можно осуществлять поэтапное сканирование на разных углах места. Возможны другие варианты применения, например, с использованием одной приемной диаграммы, где направление определяется методом вычитания амплитуд отраженных сигналов, равноотстоящих от максимальной амплитуды, как отмечено в патенте автора №2421749. Для определения направления также можно использовать оптические координаторы и телевизионные датчики, а для излучения - лазерные передатчики. Таким образом, без использования дополнительных передающих диаграмм и передатчиков, излучающих импульсы, уменьшается время обзора. Использование же нескольких каналов приемников практически не скажется на увеличении громоздкости. В предлагаемом устройстве обеспечивается обнаружение и многоцелевое слежение за объектами. Устройство можно применить в корабельных и бортовых условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2010 |
|
RU2447456C1 |
| РАДИОЛОКАТОР | 2008 |
|
RU2402039C2 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2008 |
|
RU2390037C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2011 |
|
RU2460084C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ | 2003 |
|
RU2232401C1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТА | 1991 |
|
RU2013025C1 |
| РАДИОЛОКАТОР | 2007 |
|
RU2337377C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ | 2010 |
|
RU2421749C1 |
| РАДИОЛОКАТОР | 1992 |
|
RU2073883C1 |
| РАДИОЛОКАТОР | 1993 |
|
RU2073881C1 |
Изобретение относится к радиолокации и может использоваться для ускоренного поиска и слежения за объектами. Достигаемый технический результат - упрощение изделия без уменьшения точности и величины определения дальности. Указанный результат достигается за счет того, что заявленное устройство содержит блок фиксации перемещения луча, датчик азимутальных меток с минутным и секундным разрешением счетчика, блок определения направления, блок вычитания, датчик направления излучения импульсов, блок вычитателей, блок дешифраторов и блок элементов совпадения, определенным образом соединенные между собой. 2 ил.
Устройство обработки радиолокационных сигналов, состоящее из блока фиксации перемещения луча, датчика азимутальных меток с минутным и секундным разрешением счетчика, блока определения направления и блока вычитания, где первый выход датчика азимутальных меток с минутным и секундным разрешением соединен с входом блока фиксации перемещения луча, а второй выход датчика соединен со входом счетчика, имеющего группу выходов, соединенную с группой входов блока вычитания, отличающееся тем, что вводится датчик направления излучения импульсов, блок вычитателей, блок дешифраторов и блок элементов совпадения, при этом первая и вторая группы входов и группа выходов блока вычитателей соответственно соединены с группой выходов датчика направлений излучений импульсов, с группой выходов блока определения направления и через блок дешифраторов со второй группой входов блока элементов совпадения, имеющего первую группу входов и группу выходов, соответственно соединенные с группой выходов датчика направлений излучений импульсов и со второй группой входов блока вычитания.
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2008 |
|
RU2390037C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2003 |
|
RU2247408C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ ДВИЖЕНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ В ОБЗОРНЫХ РЛС | 2007 |
|
RU2337378C1 |
| Способ крашения мехов | 1939 |
|
SU56653A1 |
| US 5132689 A, 21.07.1992 | |||
| US 2007008213 B2, 05.02.2008 | |||
| US 2005264438 B2, 07.11.2006 | |||
| Шкаф для охлаждения продуктов на горизонтальных сплошных подложках | 1983 |
|
SU1186908A1 |

