Изобретение относится к области радиолокации и может быть использовано в системах поиска и многоцелевого сопровождения воздушных объектов.
Известен радиолокатор, описанный в справочнике по радиоэлектронике под ред. В. М. Захарова, т. 1, 1979, с. 46. Он состоит из импульсного передатчика, фазированной антенной решетки, приемника, блока фазирования, блока управления фазированием, преобразователя дальности. В нем после каждой остановки луча фазированной антенной решетки осуществляется излучение импульса. Однако устройство имеет большое время обзора из-за необходимости остановки луча в каждом из направлений.
Известен радиолокатор, выполненный в виде устройства определения высоты, описанный в патенте N 2002277, автор А.А. Часовской, 1993, 39, 40.
Он состоит из формирователя импульсов, блока управления фазированием при возвратно-поступательном перемещении луча, элемента ИЛИ, блока фазирования, импульсного передатчика, фазированной антенной решетки, линзовой приемной антенны, приемника, ограничителя по длительности блока обработки.
Принцип работы его заключается в следующем.
Формирователь импульсов формирует управляющие импульсы блоку управления фазированием при возвратно -поступательном перемещении луча, который выдает команды на перемещение луча в прямом и обратном направлении, с остановками в конце перемещения на время максимального запаздывания, отраженного от объекта сигнала. Эти команды поступают в блок фазирования, осуществляющий скачкообразное сканирование луча фазированной антенной решетки. После каждой остановки луча осуществляется излучение импульса с помощью импульсного передатчика, работающего с частотой излучения импульсов 10-50 кГц. Отраженный от объекта сигнал поступает в линзовую приемную антенну, угол поля зрения которой равен углу поля зрения фазированной антенной решетки. Далее отраженный сигнал поступает в приемник и далее через ограничитель по длительности в блок обработки, куда также поступают сигналы о прямом и обратном ходе луча с блока управления фазированием при возвратно-поступательном перемещении луча.
Блок обработки определяет дальность и направление до воздушных объектов. Однако время обзора увеличивается при увеличении количества целей в поле зрения антенн. С помощью предлагаемого устройства уменьшается время обзора.
Достигается это введением в блок обработки: генератора пилообразного напряжения с нарастающей пилой, генератора пилообразного напряжения с спадающей пилой, индикатора с двумя совмещенными лучами и блока определения дальности и направления, при этом первый и второй выходы блока управления фазированием при возвратно -поступательном перемещении луча соответственно соединены: через первый вход блока обработки, через генератор пилообразного напряжения с нарастающей пилой с первым входом индикатора с двумя совмещенными лучами и через второй вход блока обработки, через генератор пилообразного напряжения с спадающей пилой со вторым входом индикатора с двумя совмещенными лучами, имеющего третий вход, соединенный через третий вход блока обработки с выходом ограничителя по длительности, кроме того, выход вышеупомянутого индикатора соединен с входом блока определения дальности и направления.
На фиг. 1 и в тексте приняты следующие обозначения: 1 блок управления фазированием при возвратно -поступательном перемещении луча; 2 блок фазирования; 3 элемент ИЛИ; 4 импульсный передатчик; 5 фазированная антенная решетка; 6 формирователь импульсов; 7 блок обработки; 8 - генератор пилообразного напряжения с нарастающей пилой; 9 блок определения дальности и направления; 10 генератор пилообразного напряжения с спадающей пилой; 11 индикатор с двумя совмещенными лучами; 12 приемник; 13 - линзовая приемная антенна; 14 ограничитель длительности.
При этом первый и второй выходы блока управления фазированием при возвратно-поступательном перемещении луча 1 соответственно соединены: через первый вход блока обработки 7, через генератор пилообразного напряжения с нарастающей пилой 8 с первым входом индикатора с двумя совмещенными лучами 11 и через второй вход блока обработки 7, через генератор пилообразного напряжения с спадающей пилой 10 со вторым входом индикатора с двумя совмещенными лучами 11, имеющего выход, соединенный с входом блока определения дальности и направления 11, и третий вход, соединенный через третий вход блока обработки 7, через ограничитель по длительности 14, приемник 12 с выходом линзовой приемной антенны 13, жестко связанной с фазирвоанной антенной решеткой 5, первый и второй входы которой соответственно соединены: через импульсный передатчик 5 с выходом элемента ИЛИ 3 и с выходом блока фазирования 2, групповой вход которого соединен с групповым выходом блока управления фазированием при возвратно -поступательном перемещении луча 1, соединенным также с групповым входом элемента ИЛИ 3.
Работа устройства осуществляется следующим образом.
Формирователь импульсов 7 формирует импульсы для запуска блока управления фазированием при возвратно -поступательном перемещении луча 1. Состав и работа блока 1 не отличается от аналогичного блока в прототипе. Длительность импульсов равна времени сканирования луча с помощью фазированной антенной решетки 5 в одном направлении, а промежуток между импульсами равен времени остановки луча. Блок управления фазированием при возвратно -поступательном перемещении луча 1 выдает команды в виде кодов на ускоренное скачкообразное перемещение луча в прямом и обратном направлениях с остановками в конце направлений на время, равное максимальному запаздыванию отраженного от объекта сигнала. Команды выдаются блоку фазирования 2, который осуществляет скачкообразное сканирование луча, и на вход элемента ИЛИ 3, с выхода которого поступает сигнал, управляющий частотой излучения импульсного передатчика 4. После каждой остановки луча осуществляется излучение импульса, формируемого импульсным передатчиком 4.
Если принять время остановки луча равным 20 мкс, что соответствует задаваемой частоте импульсному передатчику 50 кГц, то при ширине луча 1o и зоне сканирования 50o время движения луча в каждом направлении будет составлять 1 мс. Например, при максимальной дальности обнаружения 150 км, это время последней остановки, время будет равно также 1 мс. Следовательно, общее время прямого и обратного хода будет составлять 4 мс, что является временем обзора. Прием отраженной электромагнитной энергии происходит с помощью линзовой приемной антенны 13, поле зрения которой равно зоне сканирования фазированной антенной решетки 5, с которой она жестко связана. Далее электромагнитная энергия поступает в приемник 12, где осуществляется преобразование электромагнитной энергии в электрические сигналы и выделение сигналов. С выхода приемника 12 выделенные сигналы поступают в ограничитель по длительности 14, ограничивающий длительность сигнала, до заданной величины. Это необходимо для осуществления многоцелевой обработки в блоке обработки 7, который вводится в предлагаемое устройство и состоит из: генератора пилообразного напряжения с нарастающей пилой 8, генератора пилообразного напряжения с спадающей пилой 10, индикатора с двумя совмещенными лучами 11 и блока определения дальности и направления 9.
Работа блока обработки 7 осуществляется следующим образом.
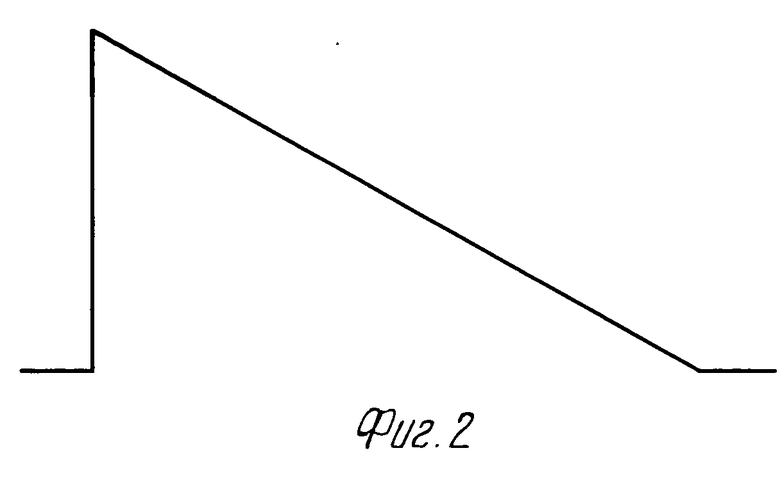
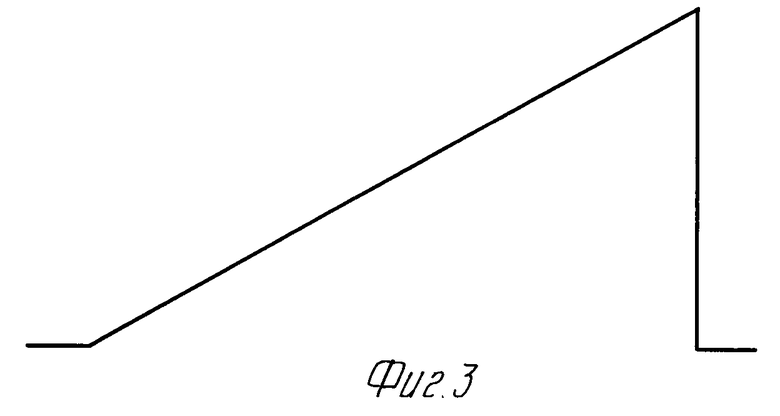
Блок управления фазированием при возвратно-поступательном перемещении луча 1 выдает импульсы наличия прямого и обратного хода соответственно в генератор пилообразного напряжения с нарастающей пилой 8 и в генератор пилообразного напряжения с спадающей пилой 10. Форма пилообразных напряжений представлена на фиг. 2 и 3. Длительность пилообразных сигналов равна времени перемещения луча в одном направлении плюс время остановки луча в конце перемещения. Пилообразные сигналы поступают соответственно на первый и второй входы индикатора с двумя совмещенными лучами 11. В нем сначала первый луч движется в прямом направлении, а потом второй луч в обратном направлении. Лучи совмещены и представляют собой одну линию на индикаторе 11. На вход поступают сигналы о наличии объекта.
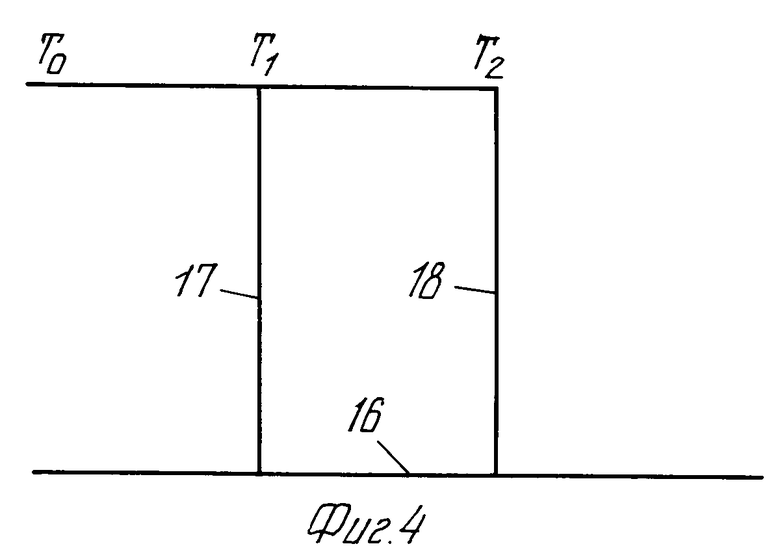
На фиг. 4 показаны отображения на экране индикатора с двумя совмещенными лучами 11, а именно линия 16 и сигналы от объекта 17-18, образованные соответственно при прямом и обратном ходах луча. Информация с экрана индикатора 11 автоматически снимается и обрабатывается с помощью блока определения дальности и направления 9. Работа его осуществляется следующим образом.
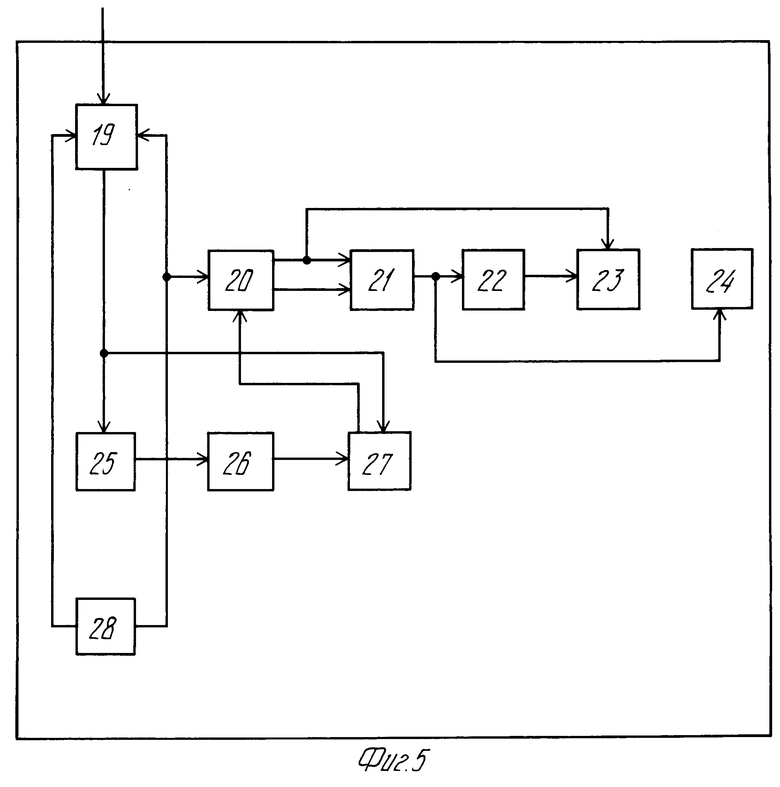
На фиг. 5 представлена блок-схема блока определения дальности и направления. Принцип его работы аналогичен работе узлов, представленных в изобретении под названием "Оптический локатор", патент N 2010264, 1994, автор Часовской А.А.
Он состоит из телевизионного датчика 19, встроенного в индикатор с двумя совмещенными лучами 11, блока измерения 20, вычитателя 21, делителя на два 22, вычитателя 23, индикатора 24, линии задержки 25, инвертора 26, элемента совпадения 27, синхронизатора 28.
Синхронизатор 28 выдает строчные и кадровые синхроимпульсы в телевизионный датчик 19, с помощью телевизионного датчика 19 осуществляется съем световой информации с экрана индикатора 11 и преобразование этой информации в электрические сигналы, которые через линию задержки 25, инвертор 26 поступают на первый вход элемента совпадения 27, на второй вход которого поступают сигналы непосредственно с телевизионного датчика 19. Элемент совпадения 27 в моменты T1 и T2 (см. фиг. 4) фиксирует появления сигналов, соответствующих максимальным амплитудам. Измерительное устройство 20 определяет временное рассогласование между моментами T1 и T0, а также T2 и T0, и работает так же, как преобразователь дальности. T0 момент наличия импульса начала строки с синхронизатора 28. Примем T1-T0=n и T2-T0=m.
Значения n и m с первого и второго выходов измерительного устройства 20 поступают на первый и второй входы вычитателя 21, где осуществляется вычитание m-n, представляющее собой информацию прямо пропорциональную дальности, которая поступает в индикатор 24 для отображения и в делитель на два 22. С выхода этого делителя значение (m-n)/2 поступает на первый вход вычитателя 23, на второй вход которого поступает значение со второго выхода измерительного устройства 29. Значение m-(m-n)/2, представляющее собой информацию о направлении, поступает на второй вход индикатора 24 для отображения.
Аналогично определяется дальность и направление для других пар сигналов, имеющих равную амплитуду.
Предлагаемое устройство можно использовать для поиска и обнаружения объектов, в том числе и воздушных. При этом уменьшается время поиска в 10-15 раз вне зависимости от количества объектов, находящихся в зоне сканирования.
Устройство можно использовать в радиолокационных высотомерах, работающих в направлении наиболее интенсивного воздушного движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЫСОТЫ | 1999 |
|
RU2168739C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЫСОТЫ | 1996 |
|
RU2119176C1 |
| ОПТИЧЕСКИЙ ЛОКАТОР | 1995 |
|
RU2097789C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2007 |
|
RU2358280C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2000 |
|
RU2193216C2 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2012 |
|
RU2479850C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2008 |
|
RU2390037C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2010 |
|
RU2447456C1 |
| ОПТИЧЕСКИЙ ЛОКАТОР | 1991 |
|
RU2028644C1 |
| Устройство определения дальности и направления | 2016 |
|
RU2625098C1 |
Радиолокатор уменьшает время обзора благодаря введению в блок обработки генератора пилообразного напряжения с нарастающей пилой, генератора пилообразного напряжения с спадающей пилой, индикатора с двумя совмещенными лучами и блока определения дальности и направления, при этом первый и второй выходы блока управления фазированием при возвратно-поступательном перемещении луча соответственно соединены: через первый вход блока обработки, через генератор пилообразного напряжения с нарастающей пилой с первым входом индикатора с двумя совмещенными лучами и через второй вход блока обработки, через генератор пилообразного напряжения с спадающей пилой со вторым входом индикатора с двумя совмещенными лучами, имеющего третий вход, соединенный через третий вход блока обработки с выходом ограничителя по длительности, кроме того, выход вышеупомянутого индикатора соединен с входом блока определения дальности и направления. 5 ил.
Радиолокатор, состоящий из формирователя импульсов, блока управления фазированием при возвратно-поступательном перемещении луча, блока фазирования, элемента ИЛИ, фазированной антенной решетки, линзовой приемной антенны, приемника и блока обработки, где вход приемника соединен с выходом линзовой приемной антенны, жестко связанной с фазированной антенной решеткой, первый и второй входы которой соответственно соединены через импульсный передатчик с выходом элемента ИЛИ и с выходом блока фазирования, групповой вход которого соединен с групповым выходом блока управления фазированием при возвратно-поступательном перемещении луча, соединенный также с групповым входом элемента ИЛИ и имеющего вход, соединенный с выходом формирователя импульсов, отличающийся тем, что вводится ограничитель длительности и вводится в блок обработки генератор пилообразного напряжения с нарастающей пилой, генератор пилообразного напряжения с спадающей пилой, индикатор с двумя совмещенными лучами и блок определения дальности и направления, при этом первый и второй выходы блока управления фазированием при возвратно-поступательном перемещении луча соответственно соединены через первый вход блока обработки, через генератор пилообразного напряжения с нарастающей пилой, с первым входом индикатора с двумя совмещенными лучами, и через второй вход блока обработки, через генератор пилообразного напряжения - с спадающей пилой, с вторым входом индикатора с двумя совмещенными лучами, имеющего третий вход, соединенный через третий вход блока обработки с выходом ограничителя по длительности, связанного с выходом приемника, кроме того, выход вышеупомянутого индикатора соединен с входом блока определения дальности и направления.
| RU, патент, 2002277, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
