Изобретение относится к оптическому приборостроению, а точнее к способам развертывания, сканирования оптического луча и к способам стабилизации оптического изображения.
Известен способ стабилизации положения оптического луча в пространстве, основанный на применении оптического клина с переменным преломляющим углом, образующимся в результате поворота одной из линз двухлинзовой системы вокруг точки, находящейся на оптической оси. Этот способ позволяет развертывать оптический луч по любой траектории, однако его применение ограничено сложной оптико-механической конструкцией, и уже при малых величинах угла поворота подвижной линзы происходит ухудшение качества оптического изображения из-за возникновения в линзах нецентрированных аберраций [1]
Известен способ сканирования, основанный на применении кулачка, задающего закон сканирования и механически связанного с ним плоского зеркала, совершающего одновременно два движения: качание по вертикали строчная развертка и медленное вращение в горизонтальной плоскости кадровая панорамная развертка. Этот способ сканирования позволяет развертывать оптический луч по любой траектории, однако требует сложной механической конструкции для реализации одновременно двух движений зеркала и при относительно малых амплитудах траектории развертывания обладает низким быстродействием [2, с. 303-304]
В качестве прототипа выбран способ развертывания оптического луча раздельным поворотом двух оптических клиньев вокруг оптической оси оптического прибора, параллельной развертываемому лучу [2, с. 227-230] Этот способ позволяет развертывать оптический луч по любой траектории и, в частности, по одной из следующих: розеточной, спиральной, циклоидальной, круговой и строчной, каждая из которых может быть получена только при определенном отношении скоростей вращения оптических клиньев W1/W2, где W1, W2 угловые скорости, соответственно, первого и второго клина. Текущие координаты точки изображения в общем случае для этого способа развертывания оптического луча по любой траектории описывают соотношениями:
где A1, A2 отклонение лучей элементами сканирующего устройства;
W1, W2 угловые скорости элементов.
Такой способ развертывания оптического луча реализуется в простой и компактной оптико-механической конструкции, однако требует больших углов поворота оптических клиньев для обеспечения развертывания оптического луча по любой траектории, в том числе и для малых амплитуд развертки. Это легко доказывается при подстановке в соотношение (1) конкретных значений координат развернутого оптического луча, например, определив для простоты A1=A2=A и выбрав две точки с угловыми координатами на траектории развертывания (X = γ, Y= 0) и (X′ = -γ, Y'=0), получаем, что для перехода развертываемого луча из одной точки в другую оптические клинья должны вращаться в соответствии со следующим соотношением:
что говорит об изменении направления вращения оптических клиньев на противоположное независимо от величины координат точки на траектории развертывания или амплитуды траектории развертывания. Этот фактор резко снижает быстродействие развертывания оптического луча данным способом и сокращает область его применения.
Задачей предложенного способа развертывания оптического луча является уменьшение углов поворота оптических клиньев и обеспечение параллельности направлений распространения развертываемого оптического луча до и после преломления оптическими клиньями в исходном состоянии, при одновременном обеспечении развертывания оптического луча по любой траектории.
Задача решается тем, что в известном способе развертывания оптического луча путем раздельного поворота оптических клиньев вокруг оси, параллельной развертываемому лучу, ребра оптических клиньев предварительно ориентируют непараллельно друг другу, в ход луча вводят дополнительный третий оптический клин с возможностью раздельного поворота, величину угла отклонения оптического луча которым определяют из соотношения:
предварительно поворачивают его вокруг оси, параллельной развертываемому оптическому лучу, а угол поворота определяют из соотношения:
α = 270-arctg[σ1-σ2sin(δ-90)/σ2cos(δ-90)], (4)
где α, δ углы предварительного поворота, соответственно, дополнительного и одного из двух оптических клиньев относительно оставшегося оптического клина (град.);
s1, σ2, σ3 величины углов отклонения оптического луча оптическими клиньями (град.),
а угол поворота одного из оптических клиньев определяют из соотношения:
F1 K1Ax (5)
угол поворота другого оптического клина определяют из соотношения:
F2 Ax(K2 K3Ax) + Ay(K4 + K5Ay) + K6AxAy (6)
а угол поворота оставшегося оптического клина определяют из соотношения:
F3 Ax(K7 + K8Ax) - Ay(K9 + K10Ay) + K11AxAy (7)
где K1, K11 коэффициенты, определяемые оптическими характеристиками каждого из клиньев;
F1, F2, F3 угол поворота оптического клина относительно исходного состояния (рад.);
Ax, Ay угловые координаты луча на траектории развертывания (рад.).
Введение в ход оптического луча третьего оптического клина, величину угла отклонения оптического луча которым определяют из соотношения (3), и предварительное ориентирование ребер оптических клиньев непараллельно друг другу, в соответствии с соотношением (4), позволяет уменьшить углы поворота оптических клиньев и обеспечить параллельность направлений распространения развертываемого оптического луча до и после преломления оптическими клиньями в исходном состоянии, а раздельный поворот их вокруг оси, параллельной развертываемому лучу, на углы, определяемые по соотношениям (5), (6), (7), обеспечивает развертывание оптического луча по любой траектории.
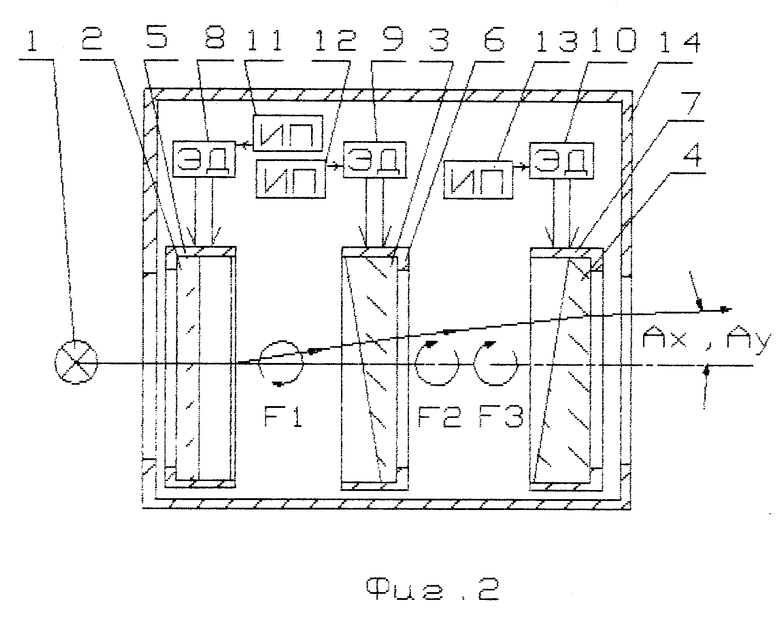
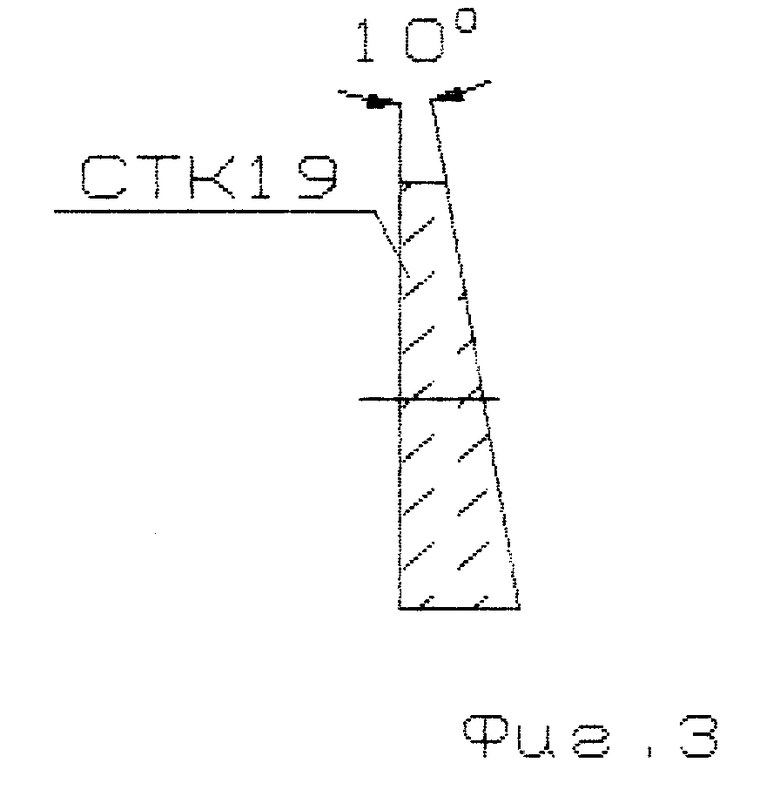
Способ развертывания оптического луча путем раздельного поворота оптических клиньев вокруг оси, параллельной развертываемому лучу, поясняется фиг. 1-3, где фиг. 1 векторная диаграмма, поясняющая соотношения (3), (4); фиг. 2 устройство реализации способа развертывания оптического луча, включающее: источник излучения 1, например лазер, три оптических клина 2, 3, 4, укрепленные каждый в своей оправе 5, 6, 7, кинематически связанной с электродвигателем 8, 9, 10, электрически связанным с источником питания 11, 12, 13, размещенные в едином корпусе 14; фиг. 3 конструкция оптических клиньев, с помощью которых реализован способ развертывания оптического луча и получены конкретные законы поворота оптических клиньев вокруг оси, параллельной развертываемому лучу.
На векторной диаграмме (фиг. 1) показана проекция трех векторов на плоскость, перпендикулярную оси вращения оптических клиньев, исходящих из точки (O) пересечения оси вращения и перпендикулярной ей плоскости, где каждый оптический клин представлен вектором (1), (2), (3), длина которого (σ1), (σ2), (σ3) определяет угол отклонения им оптического луча, а угол его поворота (α), (δ) относительно оси OY определяет величину угла предварительного поворота в исходном состоянии. Из векторной диаграммы видно, что для обеспечения параллельности направлений распространения развертываемого оптического луча до и после преломления оптическими клиньями в исходном состоянии необходимо, чтобы вектор дополнительного третьего оптического клина (3) был равен по величине и противоположен по направлению вектору суммы векторов (1) и (2). На основе приведенных выше рассуждений получены следующие соотношения для определения величины угла отклонения оптического луча и угла предварительного поворота дополнительного третьего оптического клина в зависимости от аналогичных величин базовой пары клиньев:
α = 270-arctg[σ1-σ2sin(δ-90)/σ2cos(δ-90)],
где α, δ углы предварительного поворота, соответственно, дополнительного и одного из двух оптических клиньев относительно оставшегося оптического клина (град.);
s1, σ2, σ3 величины углов отклонения оптического луча оптическими клиньями (град.).
Устройство реализации способа развертывания оптического луча (фиг. 2) работает следующим образом: оптический луч от какого-либо источника излучения 1, например лазера, попадает на поверхность первого по ходу луча оптического клина 2, и последовательно преломляется им, вторым оптическим клином 3 и третьим оптическим клином 4, укрепленным каждый в своей оправе 5, 6, 7, кинематически связанной с электродвигателем 8, 9, 10, электрически связанным с источником питания 11, 12, 13, размещенными в едином корпусе 14. Оптические клинья предварительно повернуты друг относительно друга вокруг оси, параллельной развертываемому оптическому лучу на угол, отличающийся от 0 и 180o, что обеспечивает непараллельность их ребер, причем угол предварительного поворота одного из оптических клиньев определяют из соотношения (4), а величину угла отклонения им оптического луча из соотношения (3), при этом направления распространения развертываемого оптического луча до и после преломления оптическими клиньями в исходном состоянии параллельны между собой (Ax0 0, Ay0 0), а угловые координаты оптического луча (Ax, Ay) для получения требуемой траектории развертывания обеспечивают величиной и фазой электрического сигнала, поступающего от источников питания на электродвигатели, поворачивающие через кинематическую связь оптические клинья в оправах вокруг оси, параллельной развертываемому оптическому лучу на углы, определенные из соотношений (5), (6), (7).
В качестве примера конкретной реализации способа развертывания оптического луча путем раздельного поворота оптических клиньев вокруг оси, параллельной развертываемому лучу, предлагаются три идентичных оптических клина (σ1 = σ2 = σ3),, выполненные одиночными, ребра которых предварительно повернуты на 120o друг относительно друга (из соотношений (3), (4)), угол отклонения оптического луча каждым оптическим клином составляет 7.67o, причем после предварительного поворота ребер оптических клиньев друг относительно друга на 120o (исходное состояние), развертываемый оптический луч после последовательного преломления оптическими клиньями параллелен развертываемому оптическому лучу (Ax0, Ay0), и в телесном угле величиной 3o, образованном вокруг этого луча, может быть получена любая траектория для развертываемого оптического луча. Конструктивные данные оптических клиньев представлены на фиг. 3.
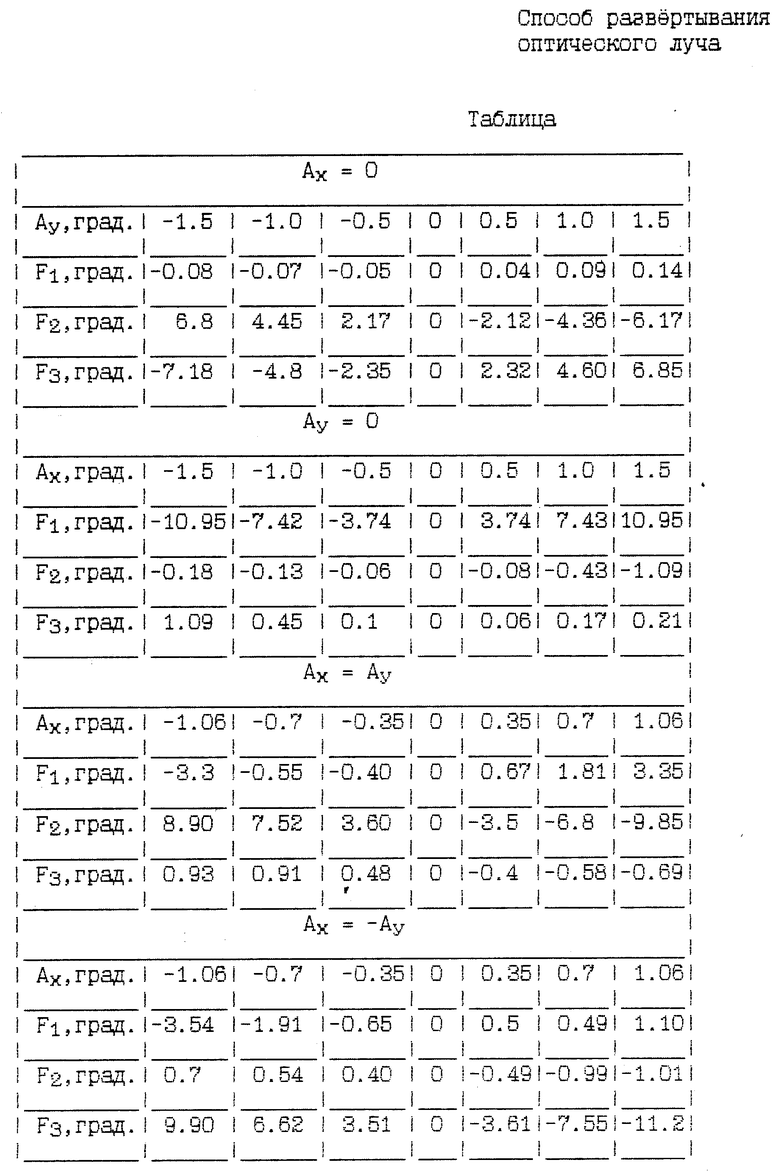
Благодаря возможности задания в разделе нецентрированных систем программы расчета оптических систем "САРО" ВНЦ "ГОИ им. С.И. Вавилова" оптических клиньев и величин углов их поворота, были получены численные значения зависимости величин угловых координат развернутого оптического луча от углов поворота оптических клиньев для четырех направлений развертывания: параллельно оси OY (Ax=0), параллельно оси OX (Ay=0) и параллельно осям, наклоненным к оси OY на -45o (Ax=Ay) и на +45o (Ax=-Ay). Численные значения результатов расчета сведены в таблицу. Аппроксимацией этих данных образованы следующие соотношения для углов поворота оптических клиньев в зависимости от требуемого приращения угловых координат развертываемого оптического луча на траектории развертывания:
где F1, F2, F3 угол поворота оптического клина относительно исходного состояния (в радианах);
Ax, Ay угловые координаты оптического луча на траектории развертывания (в радианах).
Полученные соотношения позволяют рассчитывать углы поворота оптических клиньев, требуемые для обеспечения заданных угловых координат развернутого оптического луча в телесном угле величиной 3o с погрешностью не более 3% причем величина погрешности может быть снижена уточнением коэффициентов K1 K11 или введением в каждое из соотношений членов с Ax, Ay более высоких порядков.
При проверке условия перехода развернутого оптического луча из точки с угловыми координатами (X = γ, Y=0) в точку (X′ = -γ, Y'=0) подстановкой в соотношения (1) и (3), (4), получаем для прототипа выражение (2), в котором угол поворота оптического клина (W1t) не зависит от величины угловых координат g и -γ. При подстановке тех же координат в соотношения (3), (4) получаем следующие значения углов поворота оптических клиньев:
для точки (X = γ , Y=0):
и для второй точки (X′ = -γ, Y'=0):
Полученные соотношения говорят о том, что углы поворота клиньев уменьшаются с уменьшением угловых координат луча на траектории развертывания, причем для точки с координатами (0,0) на траектории развертывания оптические клинья не поворачиваются (F1=F2=F3=0) и обеспечивается параллельность направлений оптического луча в исходном состоянии до и после преломления оптическими клиньями. Это позволяет утверждать, что в заявляемом способе развертывания оптического луча путем раздельного поворота трех оптических клиньев вокруг оси, параллельной развертываемому лучу, решена задача уменьшения углов поворота оптических клиньев и обеспечения параллельности направлений распространения развертываемого оптического луча до и после преломления оптическими клиньями в исходном состоянии, при одновременном обеспечении развертывания оптического луча по любой траектории.
Использование: оптическое приборостроение. Изобретение позволяет уменьшить углы поворота оптических клиньев и обеспечить параллельность направлений распространения развертываемого оптического луча до и после преломления клиньями в исходном состоянии, при одновременном обеспечении развертывания оптического луча по любой траектории. Сущность изобретения: в способе развертывания оптического луча раздельно поворачивают оптические клинья вокруг оси, параллельной развертываемому лучу, ребра оптических клиньев предварительно ориентируют непараллельно друг другу, в ход луча вводят дополнительный третий оптический клин с возможностью раздельного поворота, величину угла отклонения оптического луча которым определяют из определенного соотношения, предварительно поворачивают его вокруг оси, параллельной развертываемому оптическому лучу, а угол поворота определяют из соотношения, включающего значения углов предварительного поворота дополнительного и одного из двух оптических клиньев относительно оставшегося оптического клина и величины углов отклонения оптического луча оптическими клиньями, а угол поворота каждого из оптических клиньев определяют из соответствующих соотношений, включающих значения углов поворота оптических клиньев относительно исходного состояния и угловые координаты луча на траектории развертывания. 3 ил., 1 табл.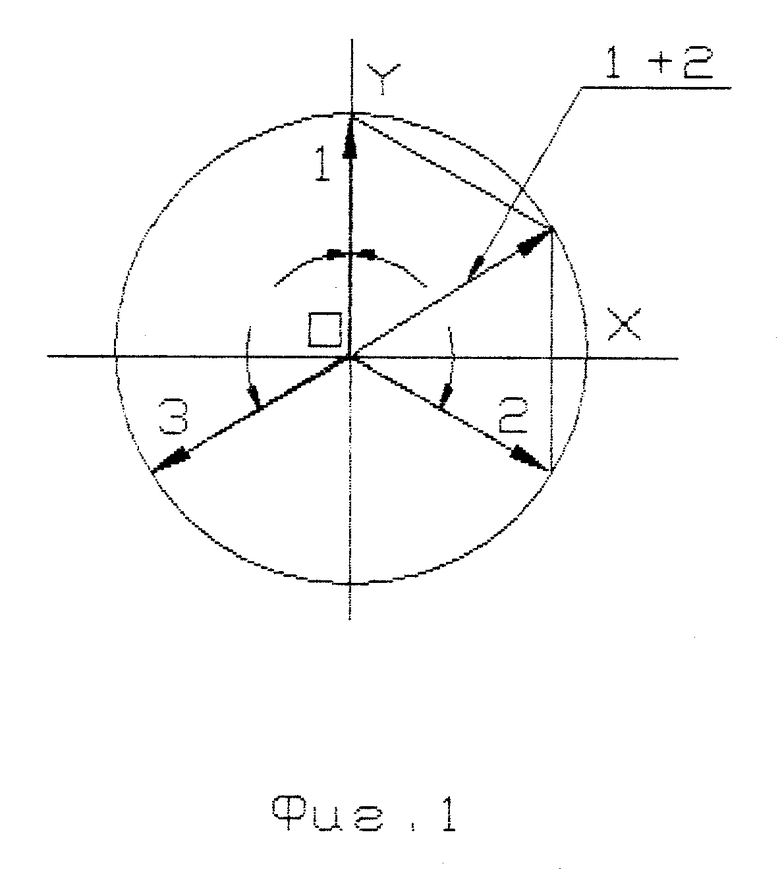
Способ развертывания оптического луча путем раздельного поворота оптических клиньев вокруг оси, параллельной развертываемому лучу, отличающийся тем, что ребра оптических клиньев предварительно ориентируют непараллельно друг другу, в ход луча вводят дополнительный третий оптический клин с возможностью раздельного поворота, величину угла отклонения оптического луча которым определяют из соотношения
предварительно поворачивают его вокруг оси, параллельной развертываемому оптическому лучу, а угол поворота определяют из соотношения
α = 270-arctg[σ1-σ2sin(δ-90)/σ2cos(δ-90)],
где α, δ - угол предварительного поворота соответственно дополнительного и одного из двух оптических клиньев относительно оставшегося третьего оптического клина, град;
σ1, σ2, σ3 - величины углов отклонения оптического луча соответствующими оптическими клиньями, град,
а угол поворота одного из оптических клиньев определяют из соотношения
F1 K1Aх,
угол поворота другого определяют из соотношения
F2 Ax(K2 K3Ax) + Ay (Ky + K5Ay) + K6AxAy,
и угол поворота оставшегося оптического клина определяют из соотношения
F3 Ax(K7 + K8Ax) Ay (K9 + K1 0Ay) + K11AxAy,
где К1 К11 коэффициенты, определяемые оптическими характеристиками каждого из оптических клиньев;
F1, F2, F3 угол поворота соответствующего оптического клина;
Ax, Ay соответственно меридиональная и сагиттальная составляющие угловых координат луча на траектории развертывания, рад.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Еськов Д.Н | |||
| Автоматическая стабилизация оптического изображения | |||
| - Л.: Машиностроение, 1988, с | |||
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Катыс Г.П | |||
| Автоматическое сканирование | |||
| - М.: Машиностроение, 1969, с | |||
| Автоматический тормоз к граммофону | 1921 |
|
SU303A1 |
| Ротационный колун | 1919 |
|
SU227A1 |
