Изобретение относится к машиностроению и может быть использовано для определения осевых моментов инерции, тензоров инерции и центров масс тел на платформах, вращающихся с существенным трением вокруг произвольно расположенной в пространстве оси, приводимых во вращение управляемым приводом, осуществляющим программное вращательное движение.
Известен способ определения момента и тензора инерции тела (авт. св. СССР 1415090, кл. G 01 М 1/10, опублик. 07.08.88), при котором тело устанавливают на платформе с горизонтальной осью вращения, совершающей крутильные колебания под действием маятникового силового дисбалансного механизма, измеряют пять мгновенных угловых скоростей в трех угловых положениях двухинтервальной угловой зоны измерения в течение 3/4 периода колебаний, изменяют на определенную величину крутящий гравитационный момент посредством изменения конфигурации дисбалансного механизма, повторяют измерения мгновенных угловых скоростей, по которым аналитически определяют момент инерции тела, а также аналитически определяют тензор инерции тела по шести моментам инерции, определенных относительно шести различных осей, пересекающихся в точке. Недостатком известного способа является низкая точность и производительность, обусловленная неточным учетом силы трения, неточным определением положения равновесия системы в условиях трения, в симметричной окрестности которого рассматриваются движение, неизбежная большая массивность и большая по сравнению с измеряемым телом инерционность механического привода, затраты времени на точное определение положения равновесия системы устройство-тело, необходимость начального отклонения системы, производимого вручную или каким-либо дополнительным устройством.
Известен способ определения осевого момента инерции тела (Патент РФ 2115904, кл. G 01 М 1/10, опублик. 20.07.98. Бюл. 20), при котором платформе с осью вращения и закрепленным на ней телом сообщают в допустимых пределах разгонно-тормозное вращение со скачкообразным изменением приведенного момента инерции, измеряют угловую скорость на положениях угловой зоны измерений, симметричных относительно положения статического равновесия системы, соответствующего условию отсутствия трения, по которым вычисляют момент инерции тела, а после проведения подобных испытаний относительно шести различных осей определяют тензор инерции тела в точке пересечения этих осей.
Недостатком этого способа является то, что в нем требуется предварительное определение положения равновесия системы платформа-тело, неточное в условиях существенного трения, а также то, что он осуществляется на устройствах, удовлетворяющих определенным условиям динамической несимметрии движения, причем устройство, осуществляющее движение, должно содержать элементы, позволяющие на ходу изменять свой приведенный момент инерции.
Известно устройство для определения тензора и момента инерции изделия (авт. св. СССР 1717979, кл. G 01 М 1/10, опублик. 07.03.92), содержащее основание с опорами, размещенную в последних посредством цапф кольцевую платформу с горизонтальной осью вращения и контейнером, размещенным в кольцах платформы, силовой дисбалансный механизм, насаженный на ось платформы. К недостаткам относятся невысокая точность и производительность.
Известно устройство по патенту РФ 2115904, осуществляющее способ определения момента и тензора инерции тела, которое содержит платформу с горизонтальным или наклонным валом и контейнером, установленным в подшипниковой опоре с возможностью размещения в нем тела и фиксации его в шести угловых положениях относительно оси вала, приводимого во вращение механическим дисбалансным приводом с возможностью отключения одного из двух дисбалансов в процессе движения путем удара об ограничитель.
К недостаткам устройства относятся его невысокие точность и производительность, обусловленная применением механического привода, который для выполнения своего назначения должен быть достаточно массивным, с неизбежно большим моментом инерции, превосходящим момент инерции тела, причем привод в начале эксперимента должен быть переведен во взведенное положение вручную или при помощи вспомогательного привода, а также то, что установка системы в начальное равновесное положение происходит неточно ввиду наличия трения либо требуется предварительное определение положения центра масс тела на устройствах с пренебрежимо малым трением.
Наиболее близким к изобретению является способ определения момента инерции тела (Патент РФ 2112227, кл. G 01 М 1/10, опублик. 27.05.98. Бюл. 15), при котором платформе с произвольно направленной в пространстве осью вращения, установленной в подшипниковой опоре с закрепленной на ней телом, сообщают моментом сил в виде крутящего разгонно-тормозного момента сил любой физической природы, не принимающих близких к нулю значений, однонаправленное динамически квазисимметричное относительно положения равновесия двухэтапное вращение, имеющее этап разгона с существенно отличным от нуля угловым ускорением, резко переходящим в почти симметричный ему этап торможения, измеряют конечное множество значений угловой скорости платформы в определенных угловых положениях, симметричных относительно положения статического равновесия системы платформа-тело, изменяют на известную переменную величину, удовлетворяющую определенным условиям, приложенный момент и повторно измеряют мгновенные угловые скорости, по которым аналитически определяют осевой момент инерции тела, а после шести испытаний относительно различно направленных осей вращения аналитически определяют тензор инерции тела.
Недостатком способа является невысокая точность и производительность, связанная с тем, что необходимо предварительно определять в условиях трения положение статического равновесия системы, соответствующее наиболее низкому положению центра масс, перенастраивать устройство, производить второе испытание. В этом и предыдущем способах требуется достаточно точное определение положения центра масс системы.
Наиболее близким к изобретению является устройство для определения момента и тензора инерции тела (Патент РФ на изобретение 2112227, кл. G 01 M 1/10, опублик. 27.05.98. Бюл. 15), содержащее платформу с произвольно расположенной в пространстве осью вращения, установленной в неподвижных подшипниковых опорах, захват для закрепления в нем тела, тахометр, взаимодействующий посредством муфты со стержнем, силовой механизм, выполненный в виде упругого четырехпружинного механизма, одна пара пружин которого выполнена в виде предварительно сжатых регулируемыми упорами пружин, контактирующих со стержнем муфты, а другая пара пружин установлена с зазором относительно стержня муфты, работает в пределах двух крайних измерительных интервалов и выключена при повторном испытании.
Недостатком устройства является невысокая производительность и точность, обусловленная тем, что: неточно учитывается трение; неточно и медленно определяется положение статического равновесия системы тело-платформа в условиях трения, от которого в дальнейшем производится отсчет угла поворота; система вместе с подключенным пружинным устройством вручную или каким-либо дополнительным приводом выводится из положения равновесия; требуются перенастройка пружинного привода и повторное испытание; устройство не предназначено для одновременного определения центра масс тела.
Решается задача повышения точности, производительности, расширения области применения способа и устройства путем одновременного с определением тензора инерции тела определения координат центра масс тела.
Способ основан на измерениях неравномерного вращения другого вида: реверсионно-антисимметричного полнооборотного вращательного движения (РАП-движения), не связанного с определением положения равновесия системы. Сущность способа заключается в том, что системе платформа-тело с произвольно направленной осью вращения и существенным трением в подшипниках прикладывают управляемый крутящий разгонно-тормозной момент любой физической природы, обеспечивающий реверсионно-антисимметрическое полнооборотное движение, которое начинается с произвольного углового положения платформы и содержит полный тормозной оборот с убывающей по модулю угловой скоростью и полный разгонный оборот в противоположном направлении, повторяющий в обратном порядке тормозной оборот, на том же угловом интервале. Два оборота могут быть соединены переходным процессом. На этих оборотах производят измерения угловой скорости и активного крутящего момента, не включающего в себя моменты диссипативных сил, по которым аналитически определяют осевой момент инерции, и по шести моментам инерции, определенным относительно шести осей, пересекающихся в точке, аналитически определяют тензор инерции тела и центр масс тела. В отличие от аналогов заявляемый способ не связан с предварительным определением центра масс тела. Более того, наряду с тензором инерции вычисляется и положение центра масс тела.
Способ осуществляется на автоматизированном электромеханическом устройстве, выполняющим требуемое движение в условиях измеряемых активного электромагнитного момента и угловой скорости и неизвестной нагрузки, неизвестного положения центра масс тела и неизвестных диссипативных моментов. Убывание и соответствующее нарастание величины угловой скорости может быть немонотонными, требуется лишь, чтобы на тормозном движении величина начальной угловой скорости была существенно больше конечной угловой скорости и в конкретных промежуточных положениях величины угловой скорости были связаны строгими неравенствами.
Это движение существенно отличается от предложенного в патенте 2112227 симметричного однонаправленного разгонно-тормозного движения по следующим признакам: угол поворота отсчитывается от любого положения, следовательно, исключена процедура предварительного определения положения центра масс тела или положения статического равновесия системы; рассматриваются противоположно направленные обороты системы в положительном и отрицательном направлениях, которые начинаются от одного и того же углового положения платформы. Реверсивность движения существенна, поскольку в случае однонаправленного двухоборотного тормозного-разгонного движения, происходящего не в окрестности положения равновесия, моменты сил тяжести и сил трения не обладают свойством динамической симметрии или антисимметрии.
На фиг.1 показано движение центра масс тела по окружности на плоскости, перпендикулярной оси вращения при тормозном и разгонном оборотах, происходящих против часовой стрелки и по часовой стрелке соответственно. Цифрами 0, 1, 2, 3, 4 обозначены положения центра масс в начале тормозного оборота и последующие положения через каждые четверть оборота, а 0', 1', 2', 3', 4' обозначают положения центра масс на разгонном антисимметричном обороте, r - расстояние от центра масс до оси вращения, α - начальное угловое отклонение центра масс от вертикальной плоскости, проведенной через ось вращения, след которой показан пунктиром. Поскольку положение центра масс неизвестно, то здесь r и α - неизвестные величины, причем r≥0, α≥0 или α<0.
Полагаем, что восемь положений, показанных на фиг.1, система занимает соответственно в моменты времени t0, t1, t2, t3, t4, и t'0, t'1, t'2, t'3, t'4, при этом имеет значения угловой скорости, удовлетворяющие соотношениям
ω0>ω1>ω2>ω3>ω4≥0 (1)
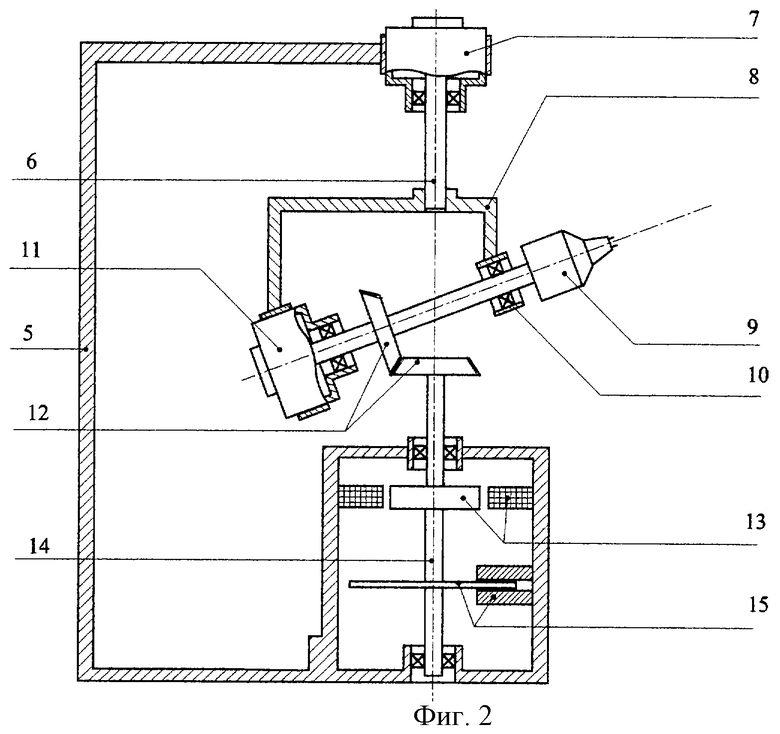
На фиг.2 схематично изображено устройство, состоящее из корпуса 5, вала платформы 6, тормозной муфты платформы 7, платформы 8 в виде неравноплечной вилки, захвата 9, подвижного вала захвата 10 с подшипниковой опорой на вилку, тормозной муфты подвижного вала 11, конической зубчатой передачи 12, электродвигателя 13, вала электродвигателя 14, датчика угол-код 15, датчика момента и управляемого компьютера (не показаны). Угол между осями 6 и 10 равен приблизительно 110715 рад, т.е. углу между осями додекаэдра.
Устройство (фиг. 2) работает следующим образом. Тело закрепляется в захвате 9, отмечается нулевое положение системы, включается электродвигатель при отпущенной тормозной муфте 7 и включенной муфте 11, выполняется первое испытание по программному РАП-движению, определяющее момент инерции тела относительно оси 6. Затем производится переключение муфт по другой, ориентирующей, программе, при отпущенной муфте 11 и включенной муфте 7 выполняется поворот тела вокруг оси 10 на (2π/5) рад, в результате другая ось додекаэдра, связанного мысленно с телом, совмещается с осью 6. Затем выполняется второе испытание, определяющее момент инерции тела относительно второй оси додекаэдра. Далее повороты и испытания повторяются еще 3 раза. После пятого испытания производится очередное (пятое) переключение муфт и выполняется РАП-движение вокруг оси 10. По измеряемым данным 6 испытаний аналитически определяются тензор инерции и центр масс тела.
В качестве РАП-движения можно принять вращательное равнозамедленное-равноускоренное движение тела, определяемое кинематическим уравнением при ω0>0, c>0, t≥0, ω4≥0, (3)
при ω0>0, c>0, t≥0, ω4≥0, (3)
ω = ω0-ct. (4)
Обозначим [t0= 0, t4] - интервал времени тормозного оборота, ω0 и ω4 - начальная и конечная скорость на нем, ε = -с - скалярное угловое ускорение, t5 - момент реверса, [t'0, t'4] - время антисимметричного разгонного равноускоренного оборота в отрицательном направлении, [t4, t'0] - время переходного движения, включающего момент реверса. Из формул (3), (4) следуют соотношения
t'0=2t5-t4, t'4=2t5. (6)
Здесь целесообразно назначить ω4 строго положительной с тем, чтобы не включать реверс в тормозное и разгонное движения. Отметим, что в условиях сухого трения в подшипниках система может задержаться на реверсе и лишь к моменту t'0 выйти на программное движение в обратном направлении, тогда в выражения (6) вносятся поправки. Испытание прекращается в момент t'4 завершения разгонного оборота.
Другой формой РАП-движения может служить вращение тела, определяемое уравнением
в котором можно выделить тормозной оборот в положительном направлении, осуществляемый на интервале [t0, t4] при t0=π/6k, t4=π/3k и антисимметричный разгонный оборот на интервале [t'0, t'4] при t'0=2π/3k, t'4=5π/6k. Переходное движение на реверсе осуществляется на временном интервале [t4, t'0].
Вращательное движение, подчиненное уравнению
ϕ = 2πsint рад.
содержит тормозной оборот, осуществляемый на временном интервале [0, π/2] , непосредственно переходящий в антисимметричный разгонный оборот на интервале времени [π/2, π], здесь можно назначить интервал [-π/2, 0] переходного движения, на котором устанавливается программное движение.
Сущность способа заключается в том, что на программном РАП-движении системы платформа-тело измеряют активный вращающий момент, в который не включается диссипативный момент, создаваемый силами трения в подшипниках и воздушным сопротивлением, а также проверяют исполнение программного движения по угловой скорости и углу поворота. По этим измерениям аналитически определяют момент инерции относительно оси вращения и две координаты центра масс. Последовательно устанавливают тело на платформе в шести различных угловых положениях по отношению к оси вращения тела и выполняют вышеизложенные испытания. В результате по измеренным величинам аналитически определяют тензор инерции и положение центра масс в форме 3 х 3-матрицы тензора инерции тела, которая содержит три осевых момента инерции, три центробежных момента инерции и три аналитически вычисляемых координаты центра масс тела.
Допустим, что осуществлено РАП-движение, состоящее из тормозного вращения на интервале времени [t0, t4] и обратного разгонного - на интервале [t'0, t'4] . Здесь t4-t0=t'4-t'0. Введены также промежуточные моменты времени t1, t2, t3 и t'1, t'2, t'3, соответствующие четверти оборота, половине оборота, трем четвертям оборота.
Полагаем, что ось вращения образует известный угол β с горизонтальной плоскостью, G1=mgcosβ - проекция силы тяжести на плоскость, m - масса тела.
Путем применения теоремы об изменении кинетической энергии к оборотам и полуоборотам находятся расчетные формулы для определения осевого момента инерции тела, тензора инерции и координат центра масс. Найдем эти формулы.
Возьмем пучок из шести осей, проходящий через некоторую точку тела. Целесообразно взять оси симметрии додекаэдра, построенного с центром в этой точке, проведенные через геометрические центры его пятиугольных граней, или, что то же самое - оси икосаэдра, проходящие через его 12 вершин. Эти оси оптимально разнесены в пространстве, образуют между собой угол, равный 1.10715 рад. Экспериментально определяют по предлагаемому способу шесть моментов инерции относительно этих осей, после чего вычисляется инерционная матрица, которой определяется тензор инерции. Одновременно можно определить положение центра масс тела как точку пересечения шести линий, параллельных осям додекаэдра, проходящим через точки, координаты которых находятся в процессе определения осевых моментов инерции.
Центр масс находится в процессе определения тензора инерции тела. Преимущество такого определения в том, что он находится одновременно с тензором инерции, т. е. без дополнительных затрат времени, при этом трение не влияет на точность определения. Не требуется применения других устройств и проведения дополнительных экспериментов, расчет производится по данным опыта определения тензора инерции.
Рассмотрим реверсионно-антисимметричное двухоборотное движение системы устройство-тело, содержащее тормозной оборот, происходящий в течение некоторого интервала времени [t0, t4], и антисимметричный разгонный оборот в течение интервала [t'0, t'4]. Каждый из интервалов разобьем на 4 подинтервала, за которые осуществляются четвертьобороты:
[t0, t1], [t1, t2], [t2, t3], [t3, t4] (7)
[t'0, t'1], [t'1, t'2], [t'2, t'3], [t'3, t'4] (8)
Считаем, что ось вращения образует известный угол β с горизонтальной плоскостью, центр масс устройства расположен на этой оси, а центр масс тела удален от оси на неизвестное расстояние r и образует в начальный момент времени t0 угол α с вертикальной плоскостью, проведенной через ось. На фиг.1 показаны 8 положений центра масс на тормозном (против часовой стрелки) и обратном антисимметричном движении. Силу тяжести тела  разложим на две составляющие:
разложим на две составляющие:  - перпендикулярную оси вращения и
- перпендикулярную оси вращения и  - параллельную ей, не совершающую работы. Очевидно, что G1=mgcosβ. Мгновенные угловые скорости системы на границах четвертьоборотов удовлетворяют условиям (1), (2).
- параллельную ей, не совершающую работы. Очевидно, что G1=mgcosβ. Мгновенные угловые скорости системы на границах четвертьоборотов удовлетворяют условиям (1), (2).
Применим теорему об изменении кинетической энергии к каждому из оборотов. Принимая во внимание (2), получим два уравнения
I(ω
I(ω
где I - момент инерции системы устройство-тело относительно оси вращения, J0 - приведенный момент инерции устройства, J - момент инерции тела, А и А' - работы активного электромагнитного момента на тормозном и разгонном оборотах, V и V' - работы диссипативных сил. Отметим, что работы силы тяжести тела на полных оборотах (замкнутых траекториях) равны нулю. По свойствам движения на оборотах имеем
V = V' < 0, A < 0, A' > 0 (11)
Путем почленного вычитания уравнения (9) из (10) получаем расчетную формулу для осевого момента инерции тела
J = (A′-A)/(ω
Формулы для определения центра масс тела
Рассмотрим 4 полуоборота системы, соответствующие интервалам времени
[t0, t2], [t1, t3], [t'2, t'4], [t'1, t'3].
Применим теорему об изменении кинетической энергии к этим полуоборотам. Получим четыре уравнения с очевидными обозначениями
I(ω
I(ω

Здесь Wi,j, W'i,j - работы силы тяжести тела на интервале времени [ti, tj], [t'i, t'j], которые определяются формулами
W02 = W'13 = 2G1rcosα при G1 =
mg cosβ, (17)
W13 = W24 = 2G1rcosα. (18)
Вычтем почленно уравнение (13) из (15) и (14) из (16). Получим два уравнения

Отсюда находим расчетные формулы для полярных координат центра масс
Здесь множитель μ определяется знаком величины sinα, т.е.

Полярные (цилиндрические) координаты (21), (22) определяют линию, параллельную оси вращения тела. Мысленно свяжем с телом виртуальный додекаэдр. Ось вращения совпадает с одной из осей симметрии додекаэдра, проходящей через центры пары противоположных его граней, а все шесть осей пересекаются в центре додекаэдра. Искомая параллельная линия, проходящая через центр масс тела, проходит через две точки этих граней, имеющих координаты (r, ϕ). Шесть линий, параллельных осям додекаэдра, пересекаются в центре масс. Достаточно построить точку пересечения двух линий.
Пусть найдены шесть моментов инерции относительно осей додекаэдра, тем самым определен тензор инерции в точке пересечения этих осей, т.е. в геометрическом центре додекаэдра. В механике его предпочитают записывать в форме инерционной квадратичной симметрической матрицы третьего порядка, содержащей три осевых момента инерции относительно прямоугольных декартовых осей и шесть попарно равных центробежных моментов инерции.
Пусть найдены шесть моментов инерции относительно осей додекаэдра, тем самым определен тензор инерции в точке О пересечения этих осей, т.е. в геометрическом центре додекаэдра. В механике его предпочитают записывать в форме инерционной квадратной симметрической матрицы третьего порядка, содержащей три осевых момента инерции относительно прямоугольных декартовых осей и шесть попарно равных центробежных моментов инерции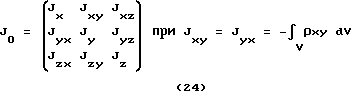
[Jx, Jy, Jz, Jxy, Jxz, Jyz]' = A[J1, J2, J3, J4, J5, J6]' (25)
при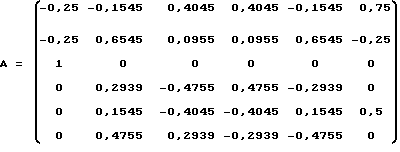
Автор заявки выполнил синтез автоматического управления для данного электромеханического устройства, построил функциональную и структурную схемы полученной системы автоматического управления, содержащей задающий блок, моментный двигатель с переменной нагрузкой, усилитель мощности, датчик угол-код, измеритель тока двигателя (или датчик момента) и регулятор. В системе применен бесконтактный моментный двигатель ДБМ-63, обеспечивающий определение моментов инерции в интервале 0,005-0,05 кг/м2.
Выполнено компьютерное моделирование структурной схемы системы в среде Simulink, которое подтвердило работоспособность, высокое быстродействие и точность системы, выполнено также аналитическое исследование с выводом динамических уравнений и численным решением их на компьютере, которое показало достаточно быстрое затухание переходных процессов и исполнение программного движения в условиях ограниченных помех.
Предлагаемый способ определения тензора инерции и центра масс и устройство для его осуществления позволяют повысить точность, производительность, расширить функциональные возможности и область применения.
Изобретение относится к машиностроению. Сущность изобретения заключается в том, что платформе с закрепленным на ней телом сообщают в условиях трения реверсионно-антисимметричное полнооборотное вращательное движение вокруг оси, содержащее тормозной оборот, примыкающий к какому-либо угловому положению, и разгонный оборот в обратном направлении, повторяющий в обратном порядке тормозной оборот, замеряют активный вращательный момент и угловую скорость и по множеству их значений аналитически определяют момент инерции. После определения шести моментов инерции определяют тензор инерции и центр масс тела. Устройство содержит платформу в подшипниковой опоре с захватом для закрепления на ней тела в шести определенных угловых положениях, управляемый электродвигатель, датчик угла поворота и угловой скорости платформы и переключатель вращения с оси платформы на ось захвата, выполненный в виде конической зубчатой передачи и двух фрикционных электромагнитных муфт. Техническим результатом является повышение точности, производительности и расширение области применения. 2 с.п. ф-лы, 2 ил.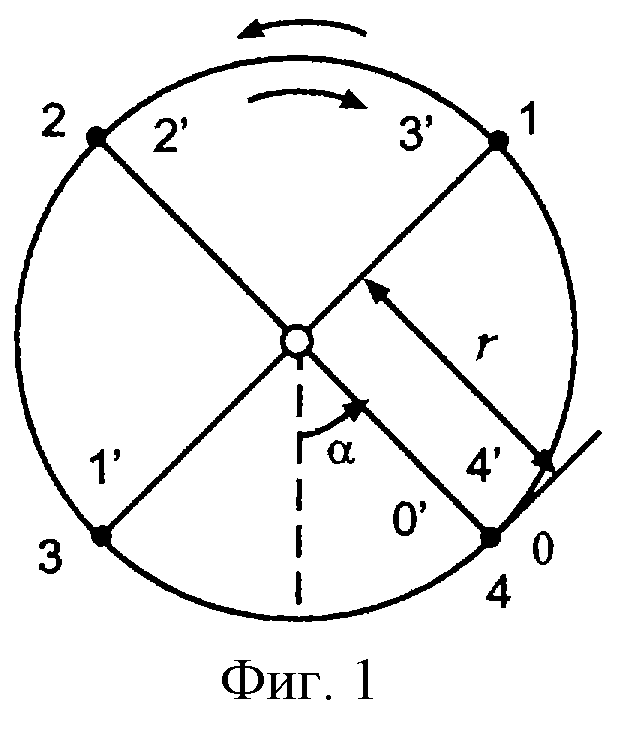
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ИНЕРЦИИ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2112227C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСЕВОГО МОМЕНТА ИНЕРЦИИ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2115904C1 |
| Способ определения момента инерции тела | 1986 |
|
SU1415090A1 |
| Устройство для определения тензора инерции изделия | 1990 |
|
SU1717979A1 |
| Устройство для определения тензора инерции | 1984 |
|
SU1262318A1 |
| WO 9606339 А1, 29.02.1996. | |||

