Изобретение относится к машиностроению и может быть использовано для определения осевых моментов инерции тел, а также тензоров инерции на платформах, вращающихся с существенным трением в ограниченных пределах вокруг произвольно расположенной в пространстве оси, снабженных измерителем угловой скорости.
Известен способ определения момента инерции тела, при котором тело устанавливают и закрепляют на платформе с горизонтальной осью вращения и известным дисбалансом, сообщают ей свободное вращательное движение с проворотом и измеряют мгновенные угловые скорости, по которым аналитически определяют момент инерции тела (авт. св. СССР N 1100505, кл. G 01 M 1/10, опублик. 30.06.84, приор. 18.03.85). Недостатком известного способа является низкая точность и производительность, обусловленная неточным учетом силы трения и необходимостью измерять параметры на полном провороте платформы вокруг горизонтальной оси в условиях трения.
Известно устройство для определения момента инерции тела, реализующее способ по (авт. св. СССР N 1100505), содержащее платформу с горизонтальной осью вращения с контейнером для закрепления тела, маятниковый силовой механизм, состоящий из двух секторов и создающий известный регулируемый крутящий момент. К недостаткам относится невысокая точность и производительность данного устройства.
Наиболее близким к изобретению является способ определения момента инерции тела (авт. св. СССР N 1415090, кл. G 01 M 1/10, опублик. 07.08.88), при котором тело устанавливается на платформу с горизонтальной осью вращения, совершающую крутильные колебания под действием маятникового силового дисбалансного механизма, измеряют пять мгновенных угловых скоростей в трех угловых положениях двухинтервальной угловой зоны измерения в течение 3/4 периода колебаний, изменяют на определенную величину крутящий гравитационный момент посредством изменения конфигурации дисбалансного механизма, повторяют измерения мгновенных угловых скоростей, по которым аналитически определяют момент инерции тела. Однако известный способ предназначен для применения только на платформах с горизонтальной осью вращения и малым трением, его характеризует низкая производительность и точность, обусловленная тем, что производятся измерения на 3/4 полного колебания, которое содержит непроизводительную, исключенную в предлагаемом изобретении потерю времени на почти равномерное движение вблизи положения равновесия - зону нечувствительности, где угловое ускорение равно или близко к нулю и поэтому момент инерции не проявляется, но проявляется неточно учитываемое трение, а также теряется время и точность при необходимом для способа выбеге, остановке и медленном возвращении платформы в зону измерений для последующего движения в этой зоне.
Наиболее близким к изобретению является устройство для определения тензора инерции изделия (авт. св. СССР N 1717979, кл. G 01 M 1/10, опублик. 07.03.92), содержащее основание с опорами, размещенную в последних посредством цапф кольцевую платформу с горизонтальной осью вращения и контейнером, размещенным в кольцах платформы, силовой дисбалансный механизм, насаженный на ось платформы
Недостатком данного устройства является недостаточная точность и производительность. Решается задача повышения точности, производительности и расширения области применения способа и устройства определения момента инерции тела.
Сущность заключается в том, что системе (платформа - тело) с произвольно направленной, установленной в подшипнике осью вращения платформы, с существенным трением, с ограничением по углу поворота, прикладывают крутящий разгонно-тормозной момент любой физической природы, не принимающий малых значений, быстро переключаемый с разгонного на тормозной, обеспечивающий однонаправленное динамически квазисимметричное двухэтапное вращение, состоящее из этапа разгона с неравным нулю угловым ускорением, резко переходящее в этап торможения с угловым замедлением (отрицательным ускорением), почти равным по модулю значениям углового ускорения в соответствующих угловых положениях этапа разгона. На таком движении измеряют мгновенные угловые скорости платформы в конечном множестве угловых положений платформы, симметрично расположенных относительно положения переключения, затем изменяют разгонно-тормозной момент на известные переменные величины, повторяют измерения, по которым аналитически определяют осевой момент инерции тела.
В изобретении, в отличие от аналогов, ось платформы направлена произвольно, наличие или отсутствие гравитационного момента (момента сил тяжести неуравновешенных масс) несущественно, крутящий разгонно-тормозной момент может быть электромагнитной, упругой и другой природы, диссипативный момент (момент сил трения воздушного аэродинамического и других сопротивлений) допускается большим, поскольку на крутящий момент возложена дополнительная функция компенсации главной части момента трения, разгонно-тормозное вращение осуществляется в одном направлении, без обратного хода, отсутствует зона нечувствительности к моменту инерции, в которой угловое ускорение близко к нулю, что достигается существенным неравенством нулю крутящего момента, который в средней точке интервала скачком меняет значение почти на противоположное. Этим расширяется область применения.
Допустимо обобщение способа: на части угловых интервалов взаимен разгона осуществлять притормаживание вращения и соответственно на симметрично расположенных интервалах взамен торможения производить разгон, что позволяет удерживать скорость вращения и вместе с ней - момент сил трения в сравнительно узких пределах.
В случаях, когда вращающаяся система платформа - тело уравновешена или когда ось вращения платформы вертикальна, или когда известно положение центра масс системы, отпадает необходимость проведения второй части испытания, аналитическое определение момента инерции производиться по угловым скоростям, найденным до перенастройки крутящего момента.
Изобретение поясняют фиг. 1 и 2.
На фиг. 1 схематично изображена система, состоящая из платформы 1 с осью вращения - валом C с закрепленным на ней телом (не показано), которая вращается в опорных цапфах в ограниченной угловой зоне A'CB', муфта со стрелкой, закрепляемая винтом в нулевом положении CO после установления системы в положении статического равновесия. Выбрана угловая зона измерений ACB, которая линией CO разделена на зону разгона ACO и равную ей зону торможения OCB, эти зоны в свою очередь разбиты на n попарно равных между собой угловых измерительных интервалов, отмеченных делениями на шкале. Измеритель мгновенных угловых скоростей в (2n + 1) угловом положении системы не показан, силовой механизм, создающий через муфту на валу крутящий момент, не показан. Углы A'CA и BCB' - зоны начального и конечного выбегов. Вращение системы начинается с зоны A'CA: стрелка проходит последовательно через все деления шкалы и выходит в зону BCB', причем настройкой крутящего разгонно-тормозного момента достигается примерное равенство конечного выбега начальному.
Угловая скорость измеряется в (2n+1) последовательных положениях
причем согласно условию динамической симметрии угловые скорости примерно равны, а угловые ускорения примерно равны по модулю, но противоположны по направлению, т.е.

Введем обозначения: Si,  (i = 1,n) - пары симметрично расположенных угловых интервалов, взятых из зоны разгона и зоны торможения
(i = 1,n) - пары симметрично расположенных угловых интервалов, взятых из зоны разгона и зоны торможения - работы разгонного момента в интервале Si и тормозного в интервале
- работы разгонного момента в интервале Si и тормозного в интервале  соответственно, причем Ai > 0,
соответственно, причем Ai > 0,  ;
; - известные (главные) части работ диссипативных сил,
- известные (главные) части работ диссипативных сил, 
 - неизвестные малые (случайные) части работы диссипативных сил;
- неизвестные малые (случайные) части работы диссипативных сил; - работы гравитационных сил, в общем случае - неизвестные, но удовлетворяющие очевидному условию
- работы гравитационных сил, в общем случае - неизвестные, но удовлетворяющие очевидному условию
Wi ≥ 0, 
J0, I и J - моменты инерции платформы, тела и системы относительно оси вращения, J = J0 + I.
Для обеспечения динамической квазисимметрии движения требуется, чтобы крутящий разгонно-тормозной момент удовлетворял B симметричных зон соответственно
Тем самым положительная величина (-2Bi) как бы изменяет направление главной части силы трения, в результате достигается силовая нечетная симметрия, которую может нарушать лишь малые случайные части диссипативных сил. Относительно работ последних естественных принять следующее условие:
т. е. суммы случайных малых диссипативных работ на поочередно переставленных интервалах равны. Это условие запишем в виде
Условие (2) выполняется с высокой точностью, точность тем выше, чем большее число измерительных интервалов. Действительно, если обеспечена точная симметрия движения, то (2) выполняется вполне точно, ввиду  . Если же движение не вполне симметрично, например, если движение в зоне разгона немного медленнее, чем в зоне торможения, то (2) выполняется с незначительной погрешностью, поскольку меньшие работы поровну перемешаны с большими.
. Если же движение не вполне симметрично, например, если движение в зоне разгона немного медленнее, чем в зоне торможения, то (2) выполняется с незначительной погрешностью, поскольку меньшие работы поровну перемешаны с большими.
Применив на каждом интервале Si и  теорему об изменении кинетической энергии и принимая во внимание соотношения (1) и другие соотношения между работами, получим 2n уравнений
теорему об изменении кинетической энергии и принимая во внимание соотношения (1) и другие соотношения между работами, получим 2n уравнений
Отметим, что левые части уравнений (4) положительны, а (5) - отрицательны. Систему (5) представим в виде
Она отличается от (4) только малыми работами Vi и  , что и обеспечивает динамическую квазисимметрию движений в зонах. Сложим почленно уравнения (4) и (6). Получим уравнения:
, что и обеспечивает динамическую квазисимметрию движений в зонах. Сложим почленно уравнения (4) и (6). Получим уравнения:
где
Умножим уравнение (7) на (-1)i, просуммируем по i и учтем условие (3). Получим уравнение:
Рассмотрим теперь второй опыт, в котором взамен рассмотренного кругтящего-тормозного момента приложен измененный момент, работы которого в угловых интервалах имеют некоторые приращения ΔAi положительные или отрицательные, а прочие условия опыта остаются прежними, т.е. имеем
измеренные угловые скорости на втором опыте обозначим  . По аналогии с уравнением (9) имеем
. По аналогии с уравнением (9) имеем
при .
.
Вычтем почленно уравнения (9) из (11), получим
Отсюда находим расчетную формулу для момента инерции тела относительно оси вращения
при
В формуле (12) знаменатель отличен от нуля, если не равен нулю числитель и тем больше, чем больше числитель. Ввиду этого целесообразно при втором опыте приращения крутящего тормозного момента выбирать знакочередующимися, например, принять
Замечание. Если ось вращения платформы вертикальна, то все работы гравитационных сил равны нулю: Wi = 0, тогда нет необходимости проводить второй опыт и для вычисления момента инерции можно использовать формулу (9). Точно также, если при произвольно направленной оси вращения заранее известно положение центра масс и масса тела, то по формуле (9) находим
В этом случае выбором крутящего-тормозного момента по угловым интервалам следует обеспечить существенное отличие от нуля числителя в формуле (14), что неизбежно обеспечит неравенство нулю знаменателя.
Момент инерции платформы находится либо расчетом при простых геометрических формах платформы, либо путем проведения испытаний с телом, момент инерции которого заранее известен, либо без тела. В последнем случае из (12) и (14) имеем расчетные формулы
и
где
Wi = 0 в случае уравновешенной горизонтальной платформы.
Устройство содержит (фиг. 2) платформу 1 с захватом (не показан) ось-вал, которой C закреплена в подшипниковой опоре, имеющую возможность вращаться в ограниченных пределах, муфту 3 со стрелкой и стержнем 2, фиксируемую на платформе в любом угловом положении винтом, неподвижную шкалу 4, имеющую 5 делений, разделяющих шкалу на 4 интервала, тахометр (не показан), измеряющий мгновенные угловые скорости при прохождении стрелки через деления, пружинный силовой механизм, создающий крутящий разгонно-тормозной момент, состоит из корпуса 5 с размещенными в нем парой предварительно сжатых пружин 6 и 7, упирающихся в неподвижный упор 8 и подвижные регулируемые упоры 9 и 10, стержень имеет возможность сжимать ту или иную пружину, кроме того механизм содержит две дополнительные пружины 11 и 12 с шарнирными закреплениями 13 и 14 и свободными концами, имеющими определенные зазоры со стержнем 2.
Первое испытание проводится следующим образом. Тело закрепляется на платформе, после установления системы в положении статического равновесия муфта со стержнем и стрелкой фиксируется на валу винтом в нулевом положении. Регулировочный винт 9 пружины 6 ввинчивается больше, чем винт 10, на расчетную величину с тем, чтобы удовлетворить соотношениям вида (1)
Здесь величины B1 и B2, т.е. главные части работ сил трения на интервалах, считаются равными B1 = B2, отклонения этого равенства включены в случайные малые части работ диссипативных сил. Платформу поворачивают против часовой стрелки, выводя за пределы шкалы и отпускают. В результате замеряют мгновенные угловые скорости в 5-и угловых положениях  . Затем пружины 6 и 7 дополнительно сжимаются регулировочными винтами на одну и ту же величину, а пружины 11 и 12 выключаются поворотом их вокруг шарниров 13 и 14 испытание повторяется, в результате чего находятся мгновенные угловые скорости
. Затем пружины 6 и 7 дополнительно сжимаются регулировочными винтами на одну и ту же величину, а пружины 11 и 12 выключаются поворотом их вокруг шарниров 13 и 14 испытание повторяется, в результате чего находятся мгновенные угловые скорости  . Согласно формуле (12), учитывая, что n = 2, получаем расчетную формулу для момента инерции тела
. Согласно формуле (12), учитывая, что n = 2, получаем расчетную формулу для момента инерции тела
I = 4(ΔA2-ΔA1)(Δa2-Δa1)-1-J0 (18)
Здесь
 - измеряемые угловые скорости на первом и втором опыте;
- измеряемые угловые скорости на первом и втором опыте;
ΔA1 и ΔA2 - приращения работ упругих сил пружин на втором опыте по сравнению с первым.
Назовем положения устройства (фиг. 2), при которых стрелка показывает на деления 0, 1, 2 в левой части шкалы соответственно нулевым, первым и вторым положениям, деформации сжатия пружины 6 в этих положениях обозначены λ0,λ1,λ2 ;
λ0 - предварительно сжатие пружины, λ1 = λ0+μ1, λ2 = λ0+μ2 где μ1 и μ2 - дополнительные ее сжатия, прямо пропорциональные для первого и первого-второго интервалов на прямолинейной шкале. Пружина 7 имеет предварительное сжатие  меньшее чем λ0 , причем при выбранном λ0 экспериментально находится
меньшее чем λ0 , причем при выбранном λ0 экспериментально находится  из условия примерного равенства начального и конечного выбегов устройства с типичным телом (или без него) за пределы шкалы. Предварительную деформацию на втором испытании обозначим
из условия примерного равенства начального и конечного выбегов устройства с типичным телом (или без него) за пределы шкалы. Предварительную деформацию на втором испытании обозначим  .
.
Деформацию сжатия пружины 11 во втором положении устройства обозначим ν2 , а в первом положении имеем ν1 = 0 по особенности конструкции. Обозначим c и c' - коэффициенты жесткости линейных пружин 6 и 11. Работы упругих сил устройства на первом и втором интервалах выражаются через разности потенциальных энергий пружин
Приращения работ после перенастройки устройства:
Итак расчетные формулы для определения момента инерции тела на устройстве имеют вид (18), (19), (20), (23), (24). Условие отличия от нуля и немалости знаменателя в (18) будет обеспечено, если не мал числитель, что обеспечивается условиями ΔA1 > 0, ΔA2 < 0 , отсюда имеем требования к перенастройке
Δλ0 > 0, C′ν
В случае горизонтальной платформы второе испытание можно не проводить, а для расчетов воспользоваться получаемой из (14) формулой
I = 4(A2 - A1 + B2 - B1)(a2 - a1)-1 - J0.
В случае, когда работы главной части диссипативных сил на интервалах равны между собой, B1 = B2, то расчетная формула еще более упрощается:
I = 4(A2 - A1)(a2 - a1)-1 - J0.
В конструкции обеспечено существенное преобладание величины A2 над A1(A2 >> A1) и следовательно a2 >> a1, поэтому не возникает затруднений при расчетах по формулам (26), (27).
Предлагаемый способ определения момента инерции и устройство для его осуществления позволяют повысить точность, производительность и расширить область применения.

Способ определения момента инерции тела и устройство для его осуществления могут быть использованы в машиностроении. Способ заключается в том, что тело устанавливают на платформу с осью вращения, сообщают ей неравномерное вращение в ограниченной угловой зоне, измеряют мгновенные угловые скорости платформы в ее определенных угловых положениях, симметричных относительно положения равновесия, затем изменяют приложенный момент сил, повторно измеряют мгновенные угловые скорости, по которым аналитически определяют момент инерции. При этом платформа выполнена с произвольно направленной осью, сообщают моментом сил любой физической природы двухэтапное неравномерное вращение, включающее этап разгона и этап торможения, с резким переключением на торможение в положении равновесия системы. Устройство содержит платформу с осью вращения и узлом крепления тела, а также пружинный силовой механизм. Пружинный силовой механизм выполнен в виде корпуса с размещенными в нем двумя парами пружин, одна из которых выполнена в виде предварительно сжатых регулируемыми упорами пружин, установленных с возможностью взаимодействия со стержнем, а другая пара пружин установлена с зазором относительно стержня муфты и с возможностью отключения. 2 с.п.ф-лы, 2 ил.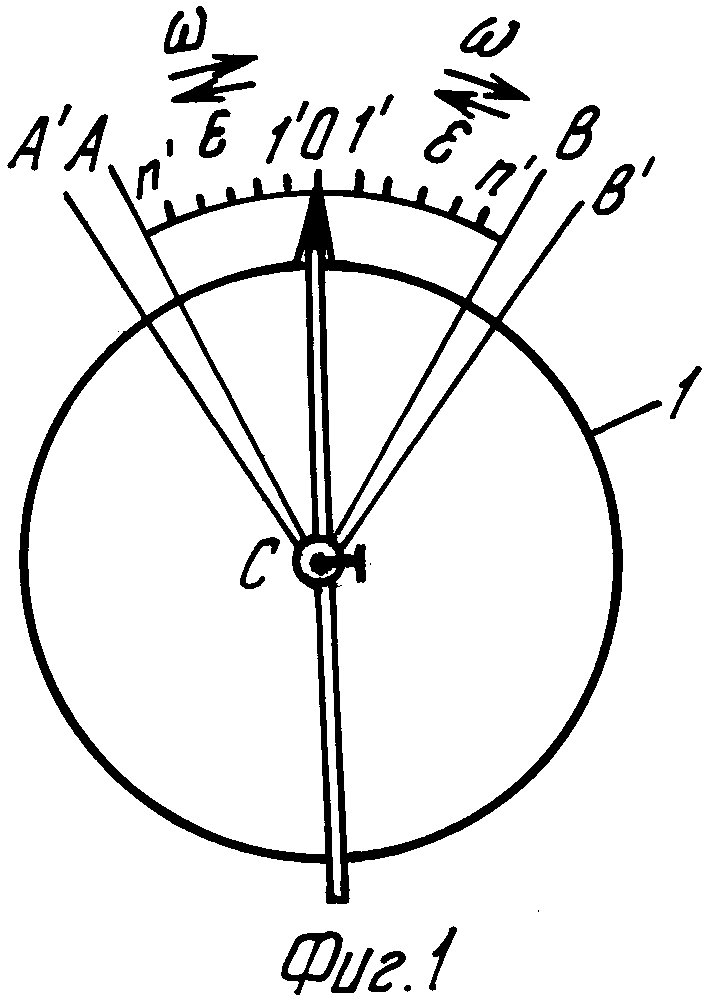
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1415090, G 01 M 1/10, 1968 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 1717979, G 01 M 1/10, 1992. | |||
