Изобретение относится к авиационной технике, в частности к методам определения наработки агрегатов самолета при эксплуатации по состоянию.
Известен способ вычисления эквивалентной наработки планера самолета, включающий ввод параметров полета от штатной системы объективного контроля в реальном масштабе времени, определение по полученным данным временных последовательностей нагрузок и выделение из этих последовательностей значений нагрузок для вычислений по заданному алгоритму выделения, расчет повреждаемости за совершенный полет и за весь период эксплуатации, накопление информации о повреждаемости (Diagnosis system for the A-320 under development at MBB, Air Eng. 1984, Vol. 56, N 5, P. 9).
Известный способ реализуется системой, содержащей модуль процессора, модуль накопителя и модуль стабилизированных источникоd питания (см. там же).
К недостаткам известного способа вычисления эквивалентной наработки планера самолета и системы для его осуществления можно отнести недостаточную оперативность информации.
Технический результат, достигаемый при осуществлении изобретения, заключается в повышении оперативности получения информации о состоянии самолета.
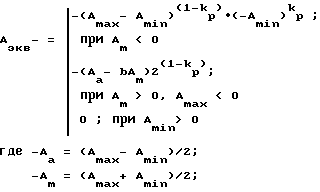
Указанный технический результат достигается тем, что в способе вычисления эквивалентной наработки планера самолета, включающем ввод параметров полета от штатной системы объективного контроля в реальном масштабе времени, определение по полученным данным временных последовательностей нагрузок и выделение из этих последовательностей значений нагрузок для вычисления по заданному алгоритму выделения, расчет повреждаемости за совершенный полет и за весь период эксплуатации, накопление информации о повреждаемости, в качестве основного параметра полета для расчета повреждаемости используют перегрузку или изгибающий момент, определение и вычисление из временных последовательностей нагрузок значений для вычислений производят по методу "дождевого потока", по данным расчета повреждаемости производят расчет эквивалентной наработки, при этом произвольный цикл расчетного параметра Ai перегрузки или изгибающего момента, характеризуемый парой экстремумов Amax и Amin, приводят к эквивалентному отнулевому циклу по формулам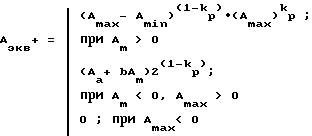
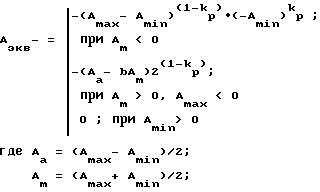
Amax и Amin амплитуды значений расчетного параметра;
Kp и b параметры, зависящие от конструкции;
по полученным данным Aэкв производят расчет текущей повреждаемости -ξi каждого i-го эквивалентного отнулевого цикла по формуле ξi = A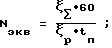
где ξp - расчетная среднечасовая повреждаемость планера, принятая ОКБ при обосновании ресурса с учетом результатов ресурсных испытаний агрегатов конструкций для типового режима полета.
Для реализации способа система вычисления эквивалентной наработки планера самолета содержит модуль процессора, модуль накопителя данных и модуль стабилизированных источников питания, снабжена модулем программируемого параллельного интерфейса, при этом модули процессора, накопителя данных и параллельного интерфейса взаимодействуют между собой по системному интерфейсу.
На чертеже изображена структурная схема системы для вычисления эквивалентной наработки планера самолета.
Система для вычисления эквивалентной наработки (СВЭН) планера самолета содержит модуль процессора, пульт управления, модуль накопителя данных, модуль стабилизированных источников питания, модуль программируемого параллельного интерфейса. Система может быть дополнительно снабжена модулем видеоадаптера.
Модули процессора, накопителя данных, программируемого параллельного интерфейса, видеоадаптера взаимодействуют между собой по системному интерфейсу РС/104 (аналог системного интерфейса ISA-16, используемого в персональных компьютерах линии IBM PC (AT), состоящему из набора адресной шины, шины данных и управляющих сигналов.
Модуль процессора является ядром системы и содержит практически все стандартные компоненты вычислительной системы.
Модуль процессора содержит следующие типы памяти:
основная оперативная память (ОЗУ) 8 Мбайт;
репрограммируемое записывающее устройство (РПЗУ) FLFSH диск N 0 256 Кбайт;
репрограммируемое записывающее устройство (РПЗУ) FLFSH диск N 1 256 Кбайт;
репрограммируемое записывающее устройство (РПЗУ) BIOS 64 Кбайт;
репрограммируемое записывающее устройство (РПЗУ) BIOS 64 Кбайт (для расширения BIOS свободное);
репрогрпммируемое записывающее устройство (РПЗУ) системной конфигурации
1 Кбайт;
ОЗУ часов реального времени 64 байт.
В РПЗУ-диске N 0 записана дисковая операционная система типа DOS ver. 6.22 с программой установки параметров BIOS (конфигурации) AT486.EXE, а в РПЗУ-диске N 1 записано текстовое функциональное программное обеспечение. Установленная с помощью программы AT486. EXE конфигурация сохраняется в энергонезависимой памяти типа EEPROM объемом 1024 байт.
На модуле центрального процессора имеются следующие каналы ввода-вывода и устройства:
два полных дуплексных последовательных порта RS232 со скоростью передачи данных от 50 до 115200 бод;
двунаправленный параллельный порт в стандарте Centronics;
интерфейс клавиатуры PC/AT;
порт динамика;
часы реального времени, записываемые внешней батареей;
сторожевой таймер.
Базовая система ввода-вывода (BIOS) программа, которая реализует интерфейс между аппаратными средствами процессора и операционной системой.
Машинные коды (BIOS) запрограммированы в дополнительной микросхеме флэш-памяти объемом 128 Кбайт, из которых 64 Кбайт занимает собственно BIOS, а остальной объем зарезервирован за функциональным программным обеспечением.
Особенности BIOS:
занимаемая область от OFOOOOH до OFFFFFH;
прямая поддержка дисков ОЗУ/ПЗУ;
определяемые пользователем параметры установки системы;
поддержка виртуальных устройств (клавиатуры, видеомонитора, гибких и жестких дисков удаленного компьютера);
прямой вызов пользовательских программ перед загрузкой DOS;
упрощенная версия DOS (Мини-DOS).
возможная загрузка DOS:
от РПЗУ диска;
от жесткого или гибкого дисков удаленного персонального компьютера IBM PC через последовательную линию (виртуальный режим).
Системный интерфейс PC/104 обеспечивает 8- и 16-разрядный обмен данными, 24-разрядное адресное пространство оперативной памяти, 10-разрядное пространство адресов регистрации периферийных устройств.
Контроллер системного интерфейса PC-104 содержит средства буферизации, декодирования и передачи набора сигналов микропроцессора 486DX2-66, дополненные сигналами прерывания и прямого доступа к памяти (ПДП).
Все сигналы системного интерфейса PC-104 совместимы с ТТЛ уровнями.
Минимальная скорость передачи данных по интерфейсу PC-104 8 Мбайт в секунду.
Подсистема прямого доступа к памяти (ПДП) предназначена для поддержки внепроцессорных передач между периферийными устройствами ввода-вывода и оперативной памятью.
Подсистема прямого доступа освобождает МП от выполнения рутинных операций ввода-вывода и может способствовать увеличению общей производительности вычислительной системы.
Подсистема ПДП состоит из:
резидентного контроллера ПДП, состоящего из двух каскадно включенных микросхем, программируемых контроллеров ПДП, подобных микросхемам i8237A;
восьми регистров формирования старших адресов ПДП для каналов 0-3 и 5-7 (регистры страниц ПДП).
Скорость обмена в режиме ПДП зависит от быстродействия контроллера ПДП, который работает на частоте 4 МГц (вдвое ниже частоты шины). ПДП-контроллер поддерживает семь каналов прямого доступа к памяти. Для этого используются два контроллера прямого доступа, подобных м/сх Intel 8237A-5, имеющих по четыре независимых канала. Каждый из контроллеров ПДП способен осуществлять передачу данных между памятью и отдельными внешними устройствами.
На модуле центрального процессора имеются следующие каналы ввода-вывода и устройства:
два полных дуплексных последовательных порта RS232 со скоростью передачи данных от 50 до 115200 бод;
двунаправленный параллельный порт в стандарте Centronics;
интерфейс клавиатуры РС/АТ;
порт динамика;
часы реального времени, запитываемые внешней батареей;
сторожевой таймер.
Подсистема счета времени
Системный таймер
Системный таймер организован в виде 3-х независимых 16-ти битовых таймеров/счетчиков, тактируемых частотой 1,19 МГц, и реализован на микросхеме i8254.
Канал 0 используется для организации службы времени в СВЭН.
Выход канала 0 подсоединен к входу прерывания IRQ0.
Канал 1 предназначен для формирования сигнала запроса на регенерацию памяти (REFRESH), который выводится на системную шину.
Канал 2 используется для формирования звукового сигнала, который поступает на динамик.
Часы реального времени
В СВЭН имеются часы реального времени (ЧРВ), которые отслеживают календарное (абсолютное, астрономическое) время.
ЧРВ реализованы на аналоге микросхемы MC146818 фирмы Motorola и имеют в своем составе задающий кварцевый генератор частоты 32768 кГц, делитель частоты 1 Гц, счетчики секунд, минут, часов, дней, недели, месяцев и лет. Кроме того, ЧРВ содержат КМОП ЗУ объемом 64 байта, из которых 10 байт используются для хранения показаний часов.
В персональных компьютерах остальные байты используются для хранения конфигурации машины (число дисковых накопителей, объем ОЗУ, тип дисплея и т.п. ). В отличие от персональных машин в СВЭН параметры конфигурации хранятся в энергонезависимом ЗУ типа EEPROM.
ЧРВ вырабатывают прерывание IRQ8 для процессора. С целью предотвращения потери информации об астрономическом времени запитываются от автономного встроенного литиевого аккумулятора, рассчитанного на непрерывную работу ЧРВ в течение 10 лет.
Для установки системной конфигурации и времени следует пользоваться программной AT486.EXE.
Доступ процессора к показателям ЧРВ производится через порты 70h и 71h, причем через порт 70h передается адрес необходимой ячейки памяти, а через порт 71h ее содержимое.
Контроллер клавиатуры
Контроллер клавиатуры реализован на однокристальном микроЭВМ типа 8042. Контроллер принимает данные от клавиатуры, поступающие в последовательном виде, и преобразует их в параллельный код (код сканирования).
Контроллер выставляет прерывание IRQ1 центральному процессору, когда данные находятся в его выходном буфере, или ожидает, когда процессор сам опросит регистр состояния, чтобы определить готовность данных.
Контроллер принимает данные от клавиатуры в последовательном коде 11-битным форматом. Первым принимается стартовый бит, за ним следует восемь информационных бит, затем контрольный бит и стоповый бит. Обмен данными синхронизируется тактовыми импульсами клавиатуры (KBD CLK), которые вырабатывает контроллер.
Если байт данных принят с ошибкой контрольной суммы посылки, контроллер посылает клавиатуре команду переспроса. Если после ряда попыток контроллер не получает данные от клавиатуры без ошибок, то в выходной буфер записывается код Efh, при этом в регистре состояния устанавливается в "1" бит ошибки.
Контроллер клавиатуры также осуществляет контроль за продолжительностью передачи данных из клавиатуры. Если передача данных клавиатуры не завершится в течение контрольного времени, то в выходной буфер клавиатуры заносится код Efh, а в регистре состояния устанавливается бит превышения времени приема. Попыток повторной передачи в этом случае не предпринимается.
Данные пересылаются в клавиатуру в том же последовательном формате, который используется и при приеме данных из клавиатуры.
Контроллер клавиатуры при передаче данных автоматически добавляет контрольный бит. Если клавиатура не начала тактирование данных в течение 15 мс или завершила тактирование ранее 2 мс с момента начала, в выходной буфер контроллера клавиатуры заносится код Efh, а в регистре состояния устанавливается бит ошибки превышения времени передачи данных в клавиатуру.
Клавиатура дает подтверждение после любой передачи данных в нее. На любую правильную команду или параметр клавиатура отвечает кодом Eah. Если ответ содержит указание на ошибку контрольной суммы посылки, контроллер записывает код FFh в выходной буфер, а в регистре состояния устанавливается бит ошибки контрольной суммы посылки. В контроллере клавиатуры запрограммирован лимит времени на получение подтверждения от клавиатуры, равный 25 мс. Если превышен этот лимит, контроллер записывает в выходной буфер код Ffh, а в регистре состояния устанавливаются биты ошибки приема и ошибки превышения времени, а контроллер 8042 не предпринимает более каких-либо повторных попыток передачи данных в клавиатуру.
Стандартные каналы ввода-вывода СВЭН
Стандартные каналы ввода-вывода СВЭН состоят из 2-х последовательных портов RS-232 и одного параллельного двунаправленного порта в стандарте Centronics.
Последовательные порты RS-232
СВЭН имеет два последовательные порта ввода-вывода информации по стандарту RS-232. Эти порты могут использоваться в системе как COM1 с базовым адресом 3F8h, COM2 с базовым адресом 2F8h или запрещены к использованию с помощью программы установки режимов работы (AT486.EXE).
Особенностью портов в СВЭН является их независимая настройка на адреса COM1 или COM2.
Формат последовательной передачи данных включает в себя:
стартовый бит;
биты данных (7 и 8);
бит четности (может отсутствовать);
стоповые биты (1 или 2).
Скорость передачи данных по портам COM1 и COM2 может быть программно установлена из ряда: 110, 150, 300, 600, 1200, 2400, 4800, 9600, 19200, 38400, 57600, 115200 бит/с.
Работа СВЭН с внешним устройством через порт RS232 происходит следующим образом. Вначале производится установление связи СВЭН с внешним устройством посредством сигналов DTR, DSR и DCD. Для этого СВЭН посылает внешнему устройству сигнал своей готовности к обмену DTR. Когда СВЭН готов принимать данные, он подает сигнал RTS. Если внешнее устройство готово для передачи данных, оно возвращает сигнал CTS. Когда напряжение на линиях RTS или CTS падает, то это сообщает передающей системе, что получающая система не готова для приема данных.
После включения питания СВЭН базовая система ввода-вывода (BIOS) тестирует порты COM1 и COM2 и инициализирует их со следующими параметрами:
скорость передачи данных 2400 бод;
бит четности отсутствует;
стоп-битов 1.
Порт COM1 имеет базовый адрес 3F8h,а порт COM2 2F8h. Порт COM1 вырабтывает прерывания IRQ4, а порт COM2 IRQ3.
Параллельный порт Centronics
Параллельный порт предназначен для выдачи данных на принтер в стандарте Centronics, но его можно использовать для выдачи данных на любое другое устройство, способное принимать данные в параллельном виде.
Особенностью параллельного порта в СВЭН является его двунаправленность при обмене информацией с внешними устройствами в соответствии со стандартом EPP. Двунаправленный режим порта можно установить с помощью программы AT486. EXE.
Скорость передачи данных обеспечивается до 2 Мбайт/с.
Работа СВЭН с принтером через Centronics происходит следующим образом.
Для того, чтобы вывести данные на принтер, программа вначале должна убедиться, что уровень сигнала на линии BSY равен логическому "0", а уровень сигнала на линии ACK логической "1". После этого СВЭН устанавливает код выводимого символа на линиях PD0.PD7.
Затем, не ранее, чем через 0,5 мкс, линия STB переводится в состояние логического "0". При этом выводимый символ запишется во внутренний буфер принтера. Уровень логического "0" необходимо удерживать в течение 0,5 мкс. После истечения интервала времени линия STB опять переводится в состояние логической "1".
После того, как программа установит линию STB в состояние логического "0", выходная линия принтера BSY устанавливается в логическую "1", сигнализируя о том, что принтер занят печатью полученного символа и временно не может принимать другие символы. Когда принтер напечатает полностью выведенный символ, линия ACK перейдет в состояние логического "0". Приблизительно через 5 мкс после этого линия BSY также перейдет в состояние логического "0". Еще через 5 мкс линия ACK примет состояние логической "1". Теперь принтер готов принять следующий символ распечатываемых данных.
Модуль накопителя
Модуль сменного накопителя предназначен для сопряжения с энергонезависимым перепрограммируемым РПЗУ на основе карты флеш-памяти объемом 2 Мбайт, которое является сменным устройством.
Особенности аппаратных средств модуля сменного накопителя:
два разъема PCMCIA с выталкивателями;
поддержка карт типов I, II и III в стандарте PCMCIA;
доступ двух карт типов I или типов II одновременно;
поддержка карт памяти SRAM, ФЛЕШ и АТА-ФЛЕШ;
поддержка драйверов АТА жестких дисков, модемов, связанных карт и карт ввода/вывода;
встроенный на модуле конвертор + 12B для карт флеш-памяти;
возможность вставлять и вынимать карты во время включенного питания;
16-битный интерфейс;
использование всех компонентов по технологии КМОП с низким уровнем рассеиваемой мощности.
Особенности программного обеспечения:
совместим с Windows;
не требует изменения BIOS или ПО приложений;
может быть сконфигурирован как загрузочный драйвер от отформатированной карты памяти PCMCIA;
включает утилиты для стирания, инициализации и форматирования карт памяти PCMCIA.
Модуль видеоадаптера SVGA
Модуль видеоадаптера SVGA предназначен для сопряжения СВЭН с видеомонитором.
Модуль видеоадаптера обеспечивает:
режимы работы в стандартах Hercules, MDA, CGA, EGA, VGA и SVGA;
совместимость с видеомониторами серии MultiSync;
поддержку стандарта VESA.
Модуль имеет видеоОЗУ объемом 1 Мбайт.
Видеоадаптер относится к классу SVGA и выполняет все расширенные функции стандартной супер-VGA.
Видеоадаптер обладает особенностью автосчитывания типа монитора для быстрой установки режимов. Если он обнаруживает, что его разъем DB15 подключен к аналоговому монитору, то автоматически устанавливается VGA-режим независимо от установочных параметров переключателя режима, который находится на модуле.
Технические характеристики видеоадаптера следующие:
разрешение;
640х480 с 256, 32К, 64К и 16,7 М цветов;
800х600 с 256, 32К и 64К цвета;
1024х768 с 256 цветами;
1280х1024 с 16 цветами;
1 Мб видео-ОЗУ;
16-битовая шина данных.
Модуль видеоадаптера SVGA имеет свою собственную программу системы ввода-вывода (Video-BIOS), которая располагается в ПЗУ модуля и начинается с адреса C0000.
Модуль параллельного интерфейса
Модуль параллельного интерфейса (МПИ) является устройством цифрового ввода/вывода и предназначен для сопряжения СВЭН с аппаратурой "ТЕСТЕР-У3".
Особенности модуля МПИ:
24 линии ввода/вывода уровнями TTL/CMOS, базирующиеся на программируемом параллельном интерфейсе типа 8255;
буферизованные выходы для совместимости с драйверами высокого уровня;
дополнительные резисторы для привязки верхних и низких уровней сигналов;
операции простого ввода/вывода или стробируемого ввода/вывода;
три 16-битовых таймера/счетчика, работающие на частоте 8 MГц;
программное обеспечение для разрешения прерываний (IRQ2-IRQ7);
требуется только один источник питания +5 B;
сопровождается программой диагностики и примерами программирования на языке Turbo C.
Модуль основан на микросхеме программируемого параллельного интерфейса 82С55 и обеспечивает ввод в СВЭН дискретных данных в режиме прерываний.
Система электропитания СВЭН
Первичным электропитанием СВЭН является бортовая сеть постоянного тока напряжением 27 B ± 10% которое подается на разъем рамы ХР2 "СОК" типа 2РМДТ30Б32Г581.
Вторичным электропитанием блока СВЭН является модуль стабилизированных источников напряжения, который выдает напряжения: +5 B, 5 A; +12 B, 0,03 A.
Модуль стабилизированных источников питания выдает питающие напряжения модулям процессора, накопителя, видеоадаптера и параллельного интерфейса. Первичное напряжение электропитания для модуля плюс 27 B ± 3 B, поступающее от бортовой чети через аппаратуру "ТЕСТЕР-У3".
Допустимые отклонения выходных напряжений от номинальных значений составляют не более ± 1% во всем диапазоне изменения напряжения первичного электропитания +27 B.
СВЭН реализует способ вычисления эквивалентной наработки планера самолета при своем функционировании следующим образом.
Информационный кадр, поступающий от аппаратуры типа "ТЕСТЕР-У3" или МСРП, имеющий строго фиксированную длину и жесткий перечень записанных полетных параметров, поступает на вход программируемого интерфейса. Каждый канал, определяющий полетный параметр в записи информационного кадра, включает в себя:
импульс начала цикла (ИНЦ);
начальный тактовый импульс (НТИ);
восьмиразрядное слово;
9-й разряд информации.
ИНЦ служит для указания начала кадра. НТЦ указывает канал в кадре. 8-разрядное слово несет информацию об аналоговых сигналах, разовых командах и служебных параметрах. 9-й разряд информации определяет запись разовых команд.
Программируемый параллельный интерфейс позволяет выделить необходимые полетные данные из структуры кадра для их дальнейшей обработки.
С помощью микропроцессора полетная информация в соответствии с программой функционирования СВЭН, заложенной в РПЗУ N 1 (репрограммируемое записывающее устройство), после автоматического ввода соответствующих тарировочных значений параметров обрабатывается в двух режимах:
1. Режим контроля непревышения установленных для ЛА технических ограничений.
2. Режим вычисления эквивалентной наработки и подготовки информационного кадра для документирования.
Полученные результаты обработки по 2-м режимам пересылаются в модуль накопителя и записываются на флеш-картах.
В системе предусмотрена возможность визуализации результатов обработки полетной информации на твердотельном дисплее с целью предупреждения летного экипажа о достижении предельных режимов полета (дублируется через динамик) и результатов вычисления эквивалентной наработки планера.
В режиме вычисления эквивалентной наработки планера согласно изобретению производят выделение из временной последовательности значений действующих перегрузок (или изгибающих моментов), получаемых с соответствующих датчиков, т. е. величины, по которым производятся вычисления. Выделение таких значений производят по известному методу "дождевого потока" (Ученые записки ЦАГИ, N 3, 1979).
По выделенным значениям, например, перегрузки, расчетный параметр Aэкв, производят его приведение к эквивалентному отнулевому циклу, который характеризуется парой экстремумов Amax и Amin, рассчитываемых по формулам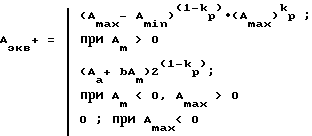
Amax и Amin амплитуды (экстремумы) значений перегрузки;
Kp и b параметры, зависящие от конструкции.
По полученным данным Aэкв производят расчет текущей повреждаемости -ξi/ каждого i-го эквивалентного отнулевого цикла по формуле
ξi = A
Затем по значениям ξi вычисляют суммарную накопительную повреждаемость -ξΣ за полет по формуле
xΣ = Σξi.
Расчет эквивалентной наработки Nэкв планера самолета (наработки по реальным условиям) и времени tп конкретного полета производят по формуле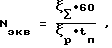
где ξp - расчетная среднечасовая повреждаемость планера, принятая ОКБ при обосновании ресурса с учетом результатов ресурсных испытаний агрегатов конструкции для типового режима полета.
Блок вычислителя СВЭН может быть подключен через соответствующее устройство ввода-вывода к стандартной клавиатуре, внешней (удаленной) ПЭВМ и к АЦПУ автоматическому цифровому питающему устройству для документирования результатов обработки полетной информации.
Изобретение относится к авиационной технике, в частности к методам определения наработки агрегатов самолета при эксплуатации по состоянию. Сущность изобретения: способ вычисления эквивалентной наработки планера самолета включает ввод параметров полета, определение временных последовательностей нагрузок и выделение из этих последовательностей значения нагрузок для вычислений, расчет повреждаемости, накопление информации о повреждаемости. Расчет повреждаемости производят по выделенным значениям перегрузки или изгибающего момента. Расчет эквивалентной наработки производят по формуле: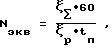
где ξp - - расчетная среднечасовая повреждаемость планера, принятая ОКБ при обосновании ресурса с учетом результатов ресурсных испытаний агрегатов конструкции для типового режима полета; ξΣ - суммарная накопленная повреждаемость за полет. Система для вычисления эквивалентной наработки (СВЭН) планера самолета содержит модуль процессора, пульт управления, модуль накопителя данных, модуль стабилизированных источников питания, модуль программируемого параллельного интерфейса. Система может быть дополнительно снабжена модулем видеоадаптера. Модули взаимодействуют между собой по системному интерфейсу. 2 с. и 1 з.п. ф-лы, 1 ил.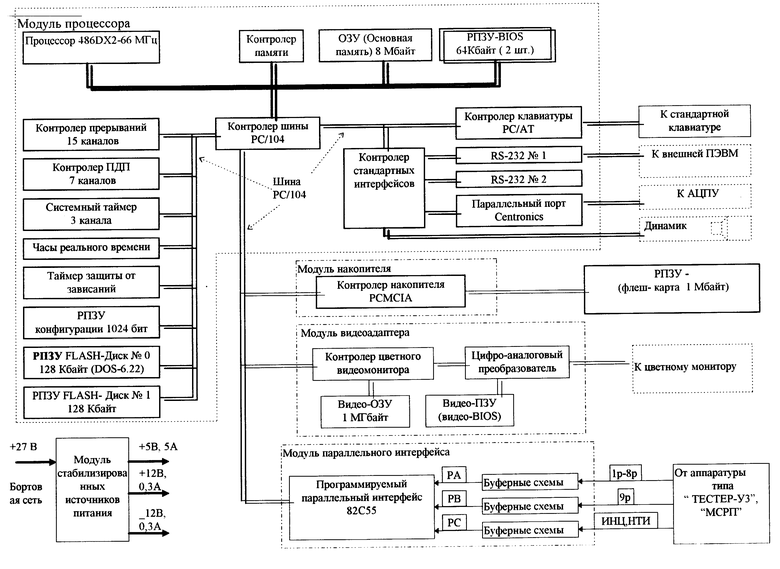
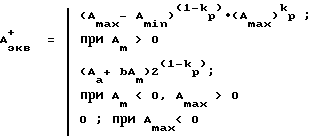
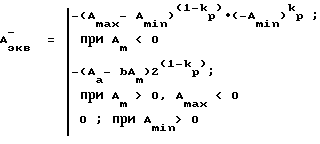
где Aa (Am a x)/2; Am (Am a x + Am i n)/2;
Ам а х и Am i n амплитуда значений расчетного параметра;
kp и b параметры, зависящие от конструкции,
по полученным данным Aэ к в производят расчет текущей повреждаемости - ξi каждого i-го эквивалентного отнулевого цикла по формуле ξi = A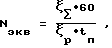
где ξp - расчетная среднечасовая повреждаемость планера, принятая ОКБ при обосновании ресурса планера с учетом результатов ресурсных испытаний агрегатов конструкции для типового режима полета.
| Прибор для подогрева воздуха отработавшими газам и двигателя | 1921 |
|
SU320A1 |
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
