Изобретение относится к космической технике, а более конкретно к способам определения массы космических объектов (КО).
Известен способ-аналог определения массы космической станции (Э.Бергменн, Дж. Дзиелски. Определение инерционных характеристик космического аппарата с помощью управляющих моментов. Аэрокосмическая техника N 11. 1990 г. стр. 31-32), состоящий из сборки КО. Суть этого способа заключается в определении центра масс космической станции Rs до стыковки с другим КО, масса которого известна и равна mо; определении после стыковки нового положения центра масс сборки КО (R s); определении массы космической станции ms до стыковки по выражению:
ms=[mо(R0 R s)(R s - Rs)]/(R s Rs)2
где Rо положение центра масс стыкуемого КО в системе координат, связанной с космической станцией.
При этом положения центра масс сборки КО и станции отдельно определяются каждый раз за счет выдачи тарированных управляющих моментов. Для этой цели могут применяться как реактивные исполнительные органы (силовые гироскопы (СГ) и двигатели ориентации (ДО), так и другие любые исполнительные органы при условии, что величина управляющих моментов от них известна.
Основной недостаток предложенного способа заключается в большом числе параметров, определяющих значение величин, входящих в выражение (1) и влияющих на относительную погрешность в определении массы станции и ее сборки с КО.
Так, при разовом определении положения центра масс величина относительной ошибки будет включать в себя (см. /1, стр. 31/):
погрешность датчиков угловой скорости;
погрешность показаний акселерометра;
погрешность приборов, реализующих фильтр Калмана;
погрешность исполнительных органов системы ориентации: при использовании ДО это разброс в определении значений тяги, величин плеч и т.д. при использовании СГ это ошибки, связанные с поддержанием заданной угловой скорости инерционного элемента, ошибки в приводах осей подвеса инерционного элемента, например, наличии люфта в передаточном механизме привода и т.д.
Указанная погрешность будет примерно увеличена в три раза при определении значений Rs, R s и Rо. Кроме этого, будет присутствовать погрешность в определении массы mо (при ее измерении до выведения на заданную орбиту), а также конструктивная погрешность в определении R о положении центра масс стыкуемого КО в системе координат связанного с ним базиса. В свою очередь без определения R 0 не возможно определить и R0, так как в данном случае идет пересчет указанных значений с учетом взаимно известного положения связанных базисов стыкуемого КО и сборки в целом.
Необходимо также отметить в качестве недостатка сложность самой расчетной модели по определению массы станции. При ее реализации чисто расчетная ошибка, связанная со сходимостью фильтра Калмана, составляла сначала ≈3,4% (см. /1, стр. 33/), а затем при увеличении времени счета ≈0,2% В самой же модели рассматривался КО абсолютно жесткой конструкции, а влияние нежесткости объекта на процедуру определения инерционных характеристик не рассматривалось вовсе.
Проводилась также оценка относительной точности в определении массы орбитального комплекса "Мир" с использованием рассмотренного способа. В качестве исполнительных органов системы ориентации, используемых для выдачи управляющих моментов, рассматривались реактивные ДО и двухстепенные СГ (гиродины).
При этом учитывали реально существующие погрешности датчиков и указанных исполнительных органов.
В первом случае относительная ошибка составляла ≈12,5% от измеряемой величины, а во втором ≈4,5% Наиболее "весомый вклад" в указанную ошибку вносила погрешность в определении величин управляющих моментов.
В качестве способа-прототипа к предлагаемому изобретению авторы выбрали способ определения массы сборки космических объектов в процессе изменения параметров ее орбиты (см. /2/ Навигационное обеспечение полета орбитального комплекса "Салют-6" "Союз" "Прогресс". АН. СССР Б.Н. Петров, И.К. Бажинов. "Наука". 1985 г. стр. 199-227). В качестве космических объектов в прототипе рассматриваются транспортный пилотируемый корабль "Союз" и грузовой корабль "Прогресс" (ГК), входящие в состав орбитальной пилотируемой станции "Салют-6". Способ-прототип включает в себя измерение параметров движения объектов (кажущейся скорости, относительной дальности и т.д.) при изменении параметров орбиты на участках дальнего маневрирования, стыковки и совместного полета. При этом каждый раз к объекту или их сборке прикладывается импульс тяги двигательной установки (ДУ):
где i номер включения ДУ;
ti момент времени i-го включения;
τi время работы ДУ; вектор тяги.
вектор тяги.
Импульс тяги ДУ сообщает объекту импульс маневра:
где m масса объекта; вектор кажущейся скорости.
вектор кажущейся скорости.
Если не учитывать направление выдаваемого ДУ импульса, то массу сборки объектов ms можно определить по выражению:
где Wsi- значение кажущейся скорости сборки после i-го включения ДУ;
P модуль вектора тяги ДУ.
Преимущество данного способа по сравнению с аналогом заключается в том, что число измеряемых параметров, от которых зависит относительная ошибка в определении ms, уменьшилось до двух: скорости движения КО и продолжительности выдачи импульса тяги ДУ. При этом в качестве ДУ рассматривается жидкостный ракетный двигатель (ЖРД) с известным значением величины тяги и неизменными рабочими характеристиками на интервале времени (ti; ti+ τi ).
Что же касается преимуществ способа-аналога перед способом-прототипом (см. /1, стр. 29/) по использованию безрасходного (по топливу реактивных двигателей) управления при определении массы сборки объектов, то они здесь не могут рассматриваться, поскольку речь идет об изменениях параметров орбиты при помощи ДУ, которые являются плановыми в управлении сборкой КО.
Кроме того, можно применить и другой источник силы: например, использовать электрические реактивные двигатели (ЭРД), меньше влияющие на окружающую среду. Можно применить также внешние источники силы, например, солнечное давление, а в качестве движителя разворачиваемый солнечный парус. В этом случае отсутствует вредное влияние на окружающую среду.
Таким образом, независимо от типа источника силы движителя выражение (4) всегда справедливо для определения массы сборки КО в полете в условиях космического пространства.
Наиболее существенный недостаток способа-прототипа заключается в неопределенности силы движителя. Предположение, принятое в прототипе о том, что во время работы движителя характеристики его неизменны на интервале (ti; ti + τi ), а также при каждом i-м его включении они соответствуют номинальным значениям, не проходит для случая определения величины массы космического объекта с приемлемой (до 1% ) относительной точностью. Так, если взять в качестве движителя ЖРД грузовых кораблей "Прогресс-М", то возможное отклонение за время его работы от среднего номинального значения величины тяги составляет ±10% Указанный ЖРД имеет двухкомпонентный состав (окислитель + горючее) и вытеснительную систему подачи топлива. Величина указанного выше отклонения определяется для установленной серии ДУ и зависит прежде всего от рабочих параметров конкретного двигателя, а также особенности его эксплуатации в условиях космического пространства. К таким определяющим рабочим параметрам относятся давление и температура компонентов в баках окислителя и горючего. Указанные отклонения тяги даны с учетом возможных допустимых изменений в значениях рабочих параметров. При проведении наземных испытаний получена зависимость тяги, определяющая ее значение от указанных параметров:
P Pн k1(TО TОН) k2(TГ - ТГН + k3(DО DОН) + k4(Dг - Dгн)
где Pн значение номинальной тяги;
Tон, Tг значения номинальных температур жидкости в баках окислителя и горючего;
Dон, Dгн значения номинальных давлений вытеснительного газа в баках окислителя и горючего;
Tо, Tг текущие значения температуры компонента в баках окислителя и горючего во время работы ДУ;
Dо, Dг текущие давления вытеснительного газа в баках окислителя и горючего;
k1, k2, k3, k4 полуэмпирические коэффициенты, полученные по результатам проведения ряда наземных огневых испытаний ДУ.
Основные недостатки определения тяги по формуле (5) заключаются в следующем:
значения коэффициентов k1.k4 уточняются после проведения полного цикла огневых испытаний ДУ, взятых выборочно из произведенной партии, и используются для оценки величины тяги двигателей этой партии;
определение реальной пустотной тяги ЖРД (см. /3 Г.Б. Синярев, М.В. Добровольский. Жидкостные ракетные двигатели, М. "Оборонпром", 1957 г.) может быть произведено лишь непосредственно в условиях космического пространства, а формулы пересчета тяги наземной в пустотную будут нести за собой как систематическую ошибку (например, связанную с технологическими особенностями изготовления двигателя и др.), так и случайную (например, связанную с изменением режима в камере сгорания при полной или частичной "засветке" двигателя Солнцем; в случае орбитальной или конструктивной тени и т.д.);
каждый из датчиков текущих измеренных значений, входящих в состав формулы, имеет свою систематическую и случайную погрешность.
Кроме этого, нельзя считать тягу неизменной величиной на интервале работы двигателя из-за наличия ряда характерных участков, например, таких как газодинамический участок выхода двигателя на режим номинальной тяги, переходной процесс к установившемуся режиму работы, постпереходной процесс, выход на установившийся режим работы, импульс последействия. Причем после выхода двигателя на режим можно также обнаружить изменения тяги, связанные с изменением площади критического сечения сопла за счет тепловой и газодинамической эрозии, разогревом сопла и т.д. Если проинтегрировать значение тяги без учета указанной специфики, то каждый из участков будет привносить свою, иногда характерную только для него погрешность. При этом увеличивается значение случайной ошибки за счет перехода в нее части систематической ошибки отдельных участков работы двигателя.
Указанные недостатки способа-прототипа не позволяют произвести определение массы сборки космических объектов с достаточной точностью для решения последующих баллистических и других научных задач.
Техническим результатом, достигаемым изобретением, является обеспечение определения величины массы сборки космических объектов с высокой степенью точности.
Указанный технический результат достигается тем, что в способе определения массы сборки космических объектов в процессе изменения параметров орбиты, включающем измерение параметров движения объектов на участке изменения параметров орбиты стыкуемого объекта известной массы и сборки, определение массы сборки по импульсу приложенной к ней силы движителем стыкуемого объекта и измеренным параметрам ее движения, измеряют интервал времени наименьшего отличия величины импульса силы между значениями, определенными по измеренным величинам параметров движения стыкуемого объекта и измеренным рабочим параметрам движителя на участках изменения параметров орбиты стыкуемого объекта известной массы, фиксируют значения рабочих параметров движителя для указанного измеренного интервала времени, а после сборки, в процессе изменения параметров ее орбиты обеспечивают реализацию импульса силы при работе движителя в диапазоне указанных выше фиксированных значений его рабочих параметров, при этом определение массы сборки осуществляют на том же измеренном интервале времени с определением величины импульса силы по измеренным значениям рабочих параметров движителя с учетом величины наименьшего отличия импульса силы.
Введение новых признаков в предлагаемый "Способ." позволяет достичь указанного технического результата.
Рассмотрим сущность предлагаемого "Способа.", приняв в качестве космических объектов стыкуемый ГК "Прогресс-М" и орбитальную пилотируемую научную станцию (ОПНС) "Мир".
Как уже отмечалось, на корабле "Прогресс-М" установлен ЖРД с известным значением величины номинальной пустотной тяги и соответствующим этому значению рабочим параметрам.
По программе полета указанного корабля, до стыковки с ОПНС "Мир" предусмотрено минимум пять маневров по изменению параметров его орбиты. ЖРД корабля является также основным источником силы для плановых изменений параметров орбиты ОПНС "Мир".
Перед установкой на ракету-носитель производится оценка величины стартовой массы ГК "Прогресс-М" с высокой точностью. В процессе полета учет расхода компонентов топлива (массы) на выполнение динамических операций ведется при помощи системы измерения расхода. Причем непосредственное измерение по мере прохождения топлива в магистралях двигателя сравнивается с расчетом по "динамическому контролю" системы управления движением. Таким образом удается подтвердить достаточность контроля и обеспечить определение величины массы корабля после каждой динамической операции с относительной точностью не хуже, чем на момент установки на ракету-носитель.
В процессе работы ДУ датчик кажущейся скорости фиксирует изменение величины скорости корабля с учетом всех возможных отклонений в импульсах тяги. Непосредственно тяга двигателя имеет пять наиболее характерных участка: I - выход двигателя на режим; II переходный процесс; III постпереходный процесс; IV установившийся режим работы; V импульс последействия. Каждый из участков характеризуется изменением рабочих параметров двигателя, особенно величины давления в баках окислителя и горючего. Первый участок длится ≈1 с и представляет собой газодинамический режим воспламенения топлива в камере сгорания. Начало второго участка характеризуется наибольшим значением тяги. Это объясняется исходно максимальным давлением в баках, связанным с первоначальным наддувом их вытеснительным газом до закрытия обратных клапанов, установленных перед каждым из них. Далее давление в баках падает, так как двигатель работает на надутых "подушках" газа в баках. В этот период наблюдается и падение тяги. Весь второй участок длится от 5 с до 15 с в зависимости от объема "подушек" в баках, объем которых в свою очередь увеличивается по мере расходования топлива. Третий участок характеризуется незначительным падением тяги. Это объясняется началом открытия обратных клапанов наддува баков, работающих в переходном режиме. Продолжительность третьего участка составляет ≈5 с. IV-й участок характеризуется установившимся значением тяги. В этом случае обратные клапаны работают в режиме поддержания величины давления наддува по мере расхода топлива из баков. И, наконец, V-й участок характеризуется истечением остатков газа после выключения двигателя.
Каждый из участков может иметь несколько временных интервалов, характеризуемых неизменным значением рабочих параметров.
Относительная ошибка δm/m в определении массы космического корабля "Прогресс-М" на участке автономного полета составляет 0,05.0,07% А точность, с которой измеряется его кажущаяся скорость W, определенная через относительную ошибку датчика кажущейся скорости δW/W имеет значение не хуже 0,03% Относительная ошибка импульса маневра определяется по выражению:
где δt погрешность измерителя времени, включающая в себя точность датчика времени, осуществляющего временную привязку значений W;
t2-t1 выбранный интервал времени действия импульса тяги.
Если принять постоянным значение δt ≈ 0,02 с, что соответствует точности приема телеметрической информации, взять значения ранее указанных относительных погрешностей, а также выбрать интервал t2-t1 30 с, то δ (mW)/mW ≈ 0,12%
Необходимо оценить и выбрать минимальную длительность интервала продолжительности импульса, исходя из имеющейся точности определения времени dt см. (6). Так, при заданном δt на интервале времени в 10 с относительная погрешность в определении импульса маневра составляет ≈ 0,29% а при 30 с, как уже отмечалось, ≈ 0,12% Поэтому необходимо выбирать для анализа как можно более продолжительный указанный интервал.
Рассмотрим общий подход к предложенному ". измерению интервала времени наименьшего отличия величины импульса силы."
Пусть на космическом объекте установлен движитель с неопределенными рабочими характеристиками формирования силы. Тогда измеряем весь интервал времени работы движителя в процессе изменения им параметров орбиты космического объекта на участке автономного полета стыкуемого объекта и определяем константу CW1 импульса маневра:
где  среднее значение массы космического объекта на интервале работы движителя, с учетом расхода рабочего тела;
среднее значение массы космического объекта на интервале работы движителя, с учетом расхода рабочего тела;
Wо модуль вектора кажущейся скорости объекта.
Определяет по выражению (6) значение относительной погрешности импульса маневра. При этом для космического объекта известной массы с высокоточным датчиком кажущейся скорости и заданном значении δt определяющим в относительной погрешности является интервал времени работы движителя. Исходя из потребной точности, сразу же устанавливается минимальное значение продолжительности интервала Δτmin По Δτmin бракуются включения движителя меньшей продолжительности.
Далее по измеренным рабочим параметрам движителя определяем по выражению (5) изменения силы Pc(t) на интервале его работы (tc1, tc2) и далее - интегральное значение импульса этой силы:
Исходя из равенства импульса силы и импульса маневра устанавливаем значение ошибки ΔC1
ΔC1 = CW1 - CP1 (9).
При последующих изменениях параметров орбиты аналогично устанавливаем значения ΔC2, ΔC3, ..., ΔCn, где n 1,2,3, число включений для одних и тех же интервалов работы движителя (начиная с момента его запуска).
Далее из значений ΔC1, ΔC2, ..., ΔCn выделяем систематическую погрешность ΔCc (см. /4/). При условии наличия ошибок одного знака в качестве систематической погрешности берется наименьшее значение модуля  выбранное из значений
выбранное из значений  с последующим присвоением знака систематической погрешности
с последующим присвоением знака систематической погрешности
После этого определяется максимальное значение случайной погрешности ΔCsm:
где  наибольшее значение модуля значений
наибольшее значение модуля значений  и среднее ее значение
и среднее ее значение 

где ΔCsn случайная погрешность каждого события,
При этом по  определяется наименьшее отличие величины импульса силы от импульса маневра. А значение ΔCsm определяется с целью исключения промаха в получении случайной погрешности, значительно превышающего ее значение, присущее данному процессу.
определяется наименьшее отличие величины импульса силы от импульса маневра. А значение ΔCsm определяется с целью исключения промаха в получении случайной погрешности, значительно превышающего ее значение, присущее данному процессу.
После указанного анализа значение импульса силы PmΣ определенного по рабочим параметрам движителя для каждого последующего m-го включения после сборки, можно записать в виде
где CPm значение импульса силы на измеренном интервале при m-м включении с определением непосредственно силы по рабочим параметрам движителя.
Величина ΔCc однозначно входит в определении импульса силы, поддается учету и характеризует лишь несовершенство расчетной зависимости получения силы по рабочим параметрам движителя. Значение  характеризует непредвиденные изменения импульса силы и определяет величину относительной погрешности при ее определении:
характеризует непредвиденные изменения импульса силы и определяет величину относительной погрешности при ее определении:
где  относительная погрешность импульса маневра при n-х включения движителя для измеренного интервала времени при автономном полете стыкуемого объекта, определяется по выражению (6);
относительная погрешность импульса маневра при n-х включения движителя для измеренного интервала времени при автономном полете стыкуемого объекта, определяется по выражению (6); относительная ошибка средней случайной погрешности в определении импульса силы.
относительная ошибка средней случайной погрешности в определении импульса силы.
Данный подход в выборе интервала времени работы движителя может себя оправдать в случае некоторого идеального режима его работы, при котором значение формируемой силы остается всегда постоянной. Однако реальные движители, в частности ЖРД, не имеют этого постоянства. А обезличивание участков работы движителя приводит к уменьшению систематической погрешности ΔCc и увеличении случайной ΔCs Поэтому при анализе работы реального движителя и сохранении условия получения минимальной погрешности в определении импульса силы по рабочим параметрам необходимо произвести аналогичный анализ отдельных участков его работы.
Если рабочая характеристика формирования силы движителя неизвестна, то проводится случайный поиск по указанной выше схеме с целью получения интервала времени с наименьшим значением  При этом сам интервал поиска выбирается из условия получения относительной ошибки не хуже потребной.
При этом сам интервал поиска выбирается из условия получения относительной ошибки не хуже потребной.
Однако в большинстве случает рабочая характеристика формирования силы движителем известна. В частности, для ЖРД это перечисленные ранее участки. Проведенный анализ показал, что наиболее подходит для высокоточного определения импульса тяги ЖРД с получением наименьшего значения  IV участок установившегося режима его работы. Прежде всего это потому, что значение тяги на продолжительном интервале времени этого участка близко к постоянному значению. Если имеются отклонения, то они продолжительны по времени, фиксируются измеряемыми рабочими параметрами двигателя и незначительны по величине. Все это позволяет на этом участке измерить достаточный для статистической обработки интервал времени при неизменившихся значениях рабочих параметров.
IV участок установившегося режима его работы. Прежде всего это потому, что значение тяги на продолжительном интервале времени этого участка близко к постоянному значению. Если имеются отклонения, то они продолжительны по времени, фиксируются измеряемыми рабочими параметрами двигателя и незначительны по величине. Все это позволяет на этом участке измерить достаточный для статистической обработки интервал времени при неизменившихся значениях рабочих параметров.
Поэтому при работе двигателя корабля "Прогресс-М" измеряем интервал времени на IV-м участке работы, начало которого устанавливается неизменными значениями рабочих параметров (в частности, давлениями в баках окислителя и горючего), которые не изменяются на всем его протяжении. Если происходит изменение одного из указанных параметров, предыдущий интервал фиксируется для анализа и измеряется следующий интервал времени на этом же участке и т. д. до выключения двигателя. Как показано в (14), значение систематической ошибки однозначно учитывается при определении PmΣ Измеренный интервал времени отслеживается при всех включениях двигателя на автономном участке полета корабля, при этом каждый раз фиксируются значения рабочих параметров. В конце всех измерений имеется определенный диапазон по каждому из указанных параметров. По возможности указанные диапазоны необходимо сужать, так как значительный разброс их значений может повлиять на величину случайной погрешности. Для ЖРД корабля "Прогресс-М" такой диапазон фактически уставливается допустимыми значениями рабочих параметров по техническим условиям эксплуатации. Предварительный анализ показал, что для конкретного двигателя работа на границе каждого из значений не влияет на величину случайной погрешности. Например, при работе двигателя на установившемся участке с давлением в баках ≈ 18,5 кГс/см2 (значении, близком к предельному верхнему), значение ошибки DC1, определенное по выражению (9), не являлось экстремальным по сравнению с аналогичными значениями при последующих включениях двигателя и меньших значениях этих параметров.
После стыковки ГК "Прогресс-М" с ОПНС "Мир" с помощью двигателя корабля проводятся плановые изменения параметров орбиты. Перед этим производится специальная подготовка к включению двигателя. Для этого фиксируются по телеметрической информации значения температур в баках окислителя и горючего. И если они не входят в допустимый зафиксированный диапазон, то выполняется ряд специальных динамических операций. Если имеется "перегрев" баков, то ОПНС "Мир" разворачиваем таким образом, чтобы двигатель находился определенное время в конструктивной тени, а если "охлаждение", то наоборот юбка его агрегатного отсека освещается Солнцем. Обеспечение начальных значений температур в баках в заданном диапазоне оказывается достаточным для того, чтобы и давление в баках находилось в фиксированных диапазонах. Имеется также возможность управления и этими параметрами. В процессе работы двигателя рабочие параметры будут менять свои значения, однако эти изменения прогнозируемы по их начальным условиям. Поэтому заданными начальными условиями удается обеспечить требуемые значения рабочих параметров и на измеренном z-м интервале времени с наименьшим  полученном по результатам включений двигателя в автономной полете корабля.
полученном по результатам включений двигателя в автономной полете корабля.
При изменении параметров орбиты ОПНС "Мир" можно для измеренного z-го интервала времени записать равенство:
где M суммарное значение массы станции;
ΔWz приращение кажущейся скорости на измеренном интервале времени работы двигателя;
Pz значение тяги на измеренном z-м интервале работы двигателя, определяется по выражению (5) с учетом реально измеренных его рабочих параметров;
Δtz продолжительность z-го интервала;
ΔCcz систематическая погрешность в определении импульса тяги z-го интервала работы двигателя, определенная на автономном участке полета корабля; среднее значение случайной погрешности в определении импульса тяги z-го интервала работы двигателя, определенное на автономном участке полета корабля.
среднее значение случайной погрешности в определении импульса тяги z-го интервала работы двигателя, определенное на автономном участке полета корабля.
Из (16) можно определить M:
При этом относительная ошибка в определении массы будет определяться по выражению (18):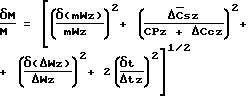
где  относительная ошибка импульса маневра, см. (6), на z-м интервале при n-х включениях двигателя на автономном участке полета;
относительная ошибка импульса маневра, см. (6), на z-м интервале при n-х включениях двигателя на автономном участке полета; относительная ошибка средней случайной погрешности в определении импульса тяги на z-м интервале работы двигателя;
относительная ошибка средней случайной погрешности в определении импульса тяги на z-м интервале работы двигателя; относительная ошибка датчика кажущейся скорости;
относительная ошибка датчика кажущейся скорости; относительная ошибка измерителя времени.
относительная ошибка измерителя времени.
Проведем численную оценку величины относительной погрешности δM/M Путь относительная ошибка импульса маневра на z-м интервале продолжительностью 30 с при n-х включениях будет равна ранее вычисленной величине
а значение относительной ошибки средней случайной погрешности в определении импульса тяги на z-м интервале работы двигателя (при средней случайной погрешности тяги ≈ 1 кГс) составит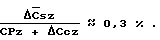
Значение относительной погрешности измерителя кажущейся скорости остается прежним  а значение
а значение  при δt = 0,02 c и Δtz = 30 c тогда
при δt = 0,02 c и Δtz = 30 c тогда
Полученные значения удовлетворяют необходимой степени точности в определении массы ОПНС "Мир". При имеющейся в настоящее время массе станции значение 0,33% составляет ≈ 400 кг.
Проводился также сравнительный анализ полученной относительной погрешности в определении массы станции на едином измеренном интервале, состоящем из II-го, III-го и IV-го участков работы двигателя. При этом значение его тяги определялось по расчетной зависимости (5) отдельно для каждого из участков с учетом изменяющихся рабочих параметров двигателя. Отдельно учитывалась также продолжительность каждого из участков, характеризуемых своей тягой. Как было установлено по результатам обработки данных на автономном участке маневрирования, значение относительной ошибки случайной погрешности в определении импульса тяги почти на порядок выше, чем для отдельного, z-го интервала: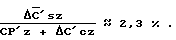
Значение относительной ошибки импульса маневра на автономном участке составило значение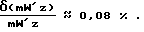
А значение относительной ошибки массы сборки с учетом полученных значений составило
Указанная относительная ошибка составляет ≈ 2600 кг массы станции, что не удовлетворяет потребной точности в ее определении.
Если определить массу станции по способу-прототипу с использованием только выражений (4), (5), не определив при этом значения систематической и случайной погрешности по результатам измерений на автономном участке полета, то относительная ошибка только по импульсу тяги составила (для того же случая включения двигателя, что и при измерении z-го интервала) ≈ 6,8 При этом относительную ошибку в определении массы станции можно приравнять к относительной ошибке в определении импульса тяги, а относительные ошибки приборного состава можно не учитывать из-за более высокого их порядка малости. Для массы станции указанный процент относительной ошибки составляет ≈ 7600 кг.
Несмотря на то, что реализация способа в основном рассмотрена для случая выбора ЖРД в качестве движителя, все его положения будут распространяться и на другие типы движителей. Более того, для других типов движителей актуальность предложенного способа возрастает. Это объясняется тем, что рабочие характеристики ЖРД наиболее изучены к настоящему времени и можно воспользоваться знанием участков со стабильной тягой при определении случайной погрешности. Если взять, например, такие перспективные движители, как лазерные и солнечные ракетные двигатели, то неопределенность в значениях величины тяги будет большей, чем для ЖРД. В случае их установки на большие космические объекты и решения аналогичной задачи по определению массы объекта необходимо применять те же технические решения, что и в предлагаемом способе.
20 февраля 1996 г. исполнилось 10 лет с момента начала эксплуатации на космической орбите ОПНС "Мир".
В настоящее время ОПНС "Мир" представляет собой конструкцию модульного типа и включает отдельные конструктивно завершенные и оснащенные агрегатами и системами функциональные модули (ФМ) и космические аппараты:
базовый блок (ББ) "Мир";
астрофизический модуль "Квант";
модуль дооснащения "Квант-2";
технологический модуль "Кристалл";
исследовательский модуль "Спектр";
стыковочный отсек;
транспортный пилотируемый корабль "Союз-ТМ";
автоматический грузовой корабль "Прогресс-М", доставляющий на станцию различные грузы.
За время нахождения в космосе осуществлено четыре стыковки ББ с крупногабаритным ФМ, две стыковки с космическим кораблем типа "Шатлл" (США), более 40 стыковок с транспортными грузовыми кораблями "Прогресс-М" и более 20 с транспортными пилотируемыми кораблями "Союз-ТМ". Доставлены на станцию "Мир" более 40 космонавтов и десятки тонн различных грузов.
Многократное и относительно частое изменение величины массы ОПНС "Мир" привело к необходимости ее практического определения.
Существовавший ранее способ определения массы по учету грузопотока на ОПНС "Мир" перестал удовлетворять требованиям необходимой точности из-за трудности учета массы расходуемых материалов.
Использование: космическая техника. Сущность: способ позволяет определить массу сборки космических объектов в процессе изменения параметров орбиты. Для этого измеряют параметры движения стыкуемого объекта известной массы и сборки, по этим параметрам и импульсу силы, приложенному к сборке движителем стыкуемого объекта, определяют массу сборки. При этом в процессе измерений находят интервал времени в работе движителя, на котором величины импульсы силы, определенные по измеренным параметрам движения стыкуемого объекта и по измеренным параметрам движителя, имеют наименьшее отличие. Для этого интервала времени фиксируются значения рабочих параметров движителя. После сборки для изменения параметров орбиты импульс силы реализуют при работе движителя в диапазоне определенных выше рабочих параметров. Массу сборки определяют на этом же интервале по величине импульса силы, определенном по измеренным значениям рабочих параметров движителя с учетом величины наименьшего отличия импульса силы.
Способ определения массы сборки космических объектов в процессе изменения параметров орбиты, включающий измерение параметров движения объектов на участке изменения параметров орбиты стыкуемого объекта известной массы и сборки, определение массы сборки по импульсу приложенной к ней силы движителем стыкуемого объекта и измеренным параметрам ее движения, отличающийся тем, что измеряют интервал времени наименьшего отличия величины импульса силы между значениями, определенными по измеренным величинам параметров движения стыкуемого объекта и измеренным рабочим параметрам движителя на участках изменения параметров орбиты стыкуемого объекта известной массы, фиксируют значения рабочих параметров движителя для указанного измеренного интервала времени, а после сборки, в процессе изменения параметров ее орбиты, обеспечивают реализацию импульса силы при работе движителя в диапазоне указанных выше фиксированных значений его рабочих параметров, при этом определение массы сборки осуществляют на том же измеренном интервале времени с определением величины импульса силы по измеренным значениям рабочих параметров движителя с учетом величины наименьшего отличия импульса силы.
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Б.Н.Петрова, 1985, с.199-227. | |||
