Изобретение относится к управлению угловым движение≈м космических аппаратов (КА) с помощью реактивных исполнительных органов - силовых гироскопов (СГ) и реактивных двигателей ориентации (ДО).
Известен способ управления КА с помощью реактивных исполнительных органов СГ и ДО при выполнении режимов ориентации (см. Система управления движением астрофизического модуля "Гамма", ТО 19К 30Ю 0000. НПО "Энергия" им. С. П. Королева, 1989), суть которого заключается в том, что в процессе поддержания заданного режима ориентации по измеренным параметрам ориентации опорного физического базиса и вектора абсолютной угловой скорости измеряют текущие значения вектора кинетического момента в системе СГ, определяют суммарное значение вектора кинетического момента, а по нему и области S располагаемых значений вектора кинетического момента - момент времени насыщения системы СГ. Далее в момент времени насыщения определяют изменения  суммарного вектора кинетического момента, требуемого для обеспечения завершения заданного режима ориентации, и фиксирует положение КА в инерциальном пространстве. После чего определяют кинематические параметры разворота КА для совмещения вектора
суммарного вектора кинетического момента, требуемого для обеспечения завершения заданного режима ориентации, и фиксирует положение КА в инерциальном пространстве. После чего определяют кинематические параметры разворота КА для совмещения вектора  с направлением, противоположным вектору разгрузочного момента с максимальным значением произведения удельного импульса ДО на плечо действия тяги ДО, разворачивают КА в определенное положение и разгружают систему СГ на величину
с направлением, противоположным вектору разгрузочного момента с максимальным значением произведения удельного импульса ДО на плечо действия тяги ДО, разворачивают КА в определенное положение и разгружают систему СГ на величину  . А после разгрузки определяют кинематические параметры разворота КА в заданную ориентацию и производят разворот по определенным параметрам в заданную ориентацию.
. А после разгрузки определяют кинематические параметры разворота КА в заданную ориентацию и производят разворот по определенным параметрам в заданную ориентацию.
Основной недостаток рассмотренного способа управления заключен в том, что для оптимальной разгрузки СГ с помощью ДО необходимо выполнить специальный дополнительный разворот КА, который не предусмотрен основной программой полета. Причем при больших моментах инерции КА указанный разворот становится невыполним с помощью одних только СГ. А применять дополнительно ДО для этого разворота не рационально исходя из самой постановки задачи: уменьшить расход рабочего тела на управление КА.
Известен другой способ управления КА с помощью реактивных исполнительных органов системы ориентации при поддержании заданной ориентации (см. Алексеев К.Б., Бебенин Г.Г. Управление космическими летательными аппаратами. М.: Машиностроение, 1974, с. 220-225) по технической сути наиболее близким к предлагаемому изобретению и выбранный в качестве прототипа.
Способ-прототип включает в себя измерение параметров ориентации опорного физического базиса, измерение вектора абсолютной угловой скорости КА, поддержание ориентации КА с помощью системы СГ по указанным измеренным значениям, измерение текущих значений вектора кинетического момента в системе СГ  , определение суммарного вектора кинетического момента
, определение суммарного вектора кинетического момента  , а по нему и параметрам области S момента времени насыщения системы (tso) определение в значениях
, а по нему и параметрам области S момента времени насыщения системы (tso) определение в значениях  постоянной и периодической составляющих, разгрузку системы СГ с помощью реактивных ДО от указанной постоянной составляющей вектора-функции
постоянной и периодической составляющих, разгрузку системы СГ с помощью реактивных ДО от указанной постоянной составляющей вектора-функции  i-ми импульсами, где i=0,1,2,3,..., путем одновременного приложения к корпусу КА разгрузочного момента от ДО минимальной длительности и равного, противоположно направленного момента от СГ. При этом при i=0 рассматривается случай, когда в момент tso начинается очередной режим ориентации (например, программный разворот с использованием СГ) и нет необходимости проводить разгрузку.
i-ми импульсами, где i=0,1,2,3,..., путем одновременного приложения к корпусу КА разгрузочного момента от ДО минимальной длительности и равного, противоположно направленного момента от СГ. При этом при i=0 рассматривается случай, когда в момент tso начинается очередной режим ориентации (например, программный разворот с использованием СГ) и нет необходимости проводить разгрузку.
Преимущество данного способа управления по сравнению со способом-аналогом заключается в том, что для разгрузки СГ не требуется проведения специального разворота. А разгрузку осуществляют только от постоянной составляющей вектора  в момент насыщения системы СГ, что также способствует экономии рабочего тела, так как переменная составляющая указанного вектора-функции не требует разгрузки (с. описание способа-прототипа).
в момент насыщения системы СГ, что также способствует экономии рабочего тела, так как переменная составляющая указанного вектора-функции не требует разгрузки (с. описание способа-прототипа).
Основной недостаток способа-прототипа заключается в том, что указанная разгрузка происходит однозначно в момент времени tso. Использование ДО с максимальным коэффициентом эффективности момента (см. способ-аналог)
Kэм = Is • l • go,
где
Is - удельный импульс ДО;
l - плечо действия тяги ДО;
go - ускорение свободно падающего тела у поверхности Земли, вовсе не рассматривается.
При этом существует отрезок [to tso] полетного времени, где to - момент начала поддержания ориентации, в течение которого можно осуществить планируемую разгрузку (в отличии от интервала отрезок включает в себя и конечные значения моментов времени). В абсолютном инерциальном базисе Iγ значения  , неизменные по величине и направлению, и зависят только от выбора ориентации КА в этом же базисе. А на связанные оси КА значения
, неизменные по величине и направлению, и зависят только от выбора ориентации КА в этом же базисе. А на связанные оси КА значения  будут перепроектироваться каждый раз в процессе смены его ориентации. Следовательно, каждый момент времени начала разгрузки после смены ориентации определяет новый расход рабочего тела в ДО, так как каждый раз будут разные сочетания величин импульсов разгрузочных моментов относительно осей связанного базиса. Выбора же оптимального сочетания, при котором расход рабочего тела в ДО на разгрузку СГ был бы минимален, в способе-прототипе не производится.
будут перепроектироваться каждый раз в процессе смены его ориентации. Следовательно, каждый момент времени начала разгрузки после смены ориентации определяет новый расход рабочего тела в ДО, так как каждый раз будут разные сочетания величин импульсов разгрузочных моментов относительно осей связанного базиса. Выбора же оптимального сочетания, при котором расход рабочего тела в ДО на разгрузку СГ был бы минимален, в способе-прототипе не производится.
Кроме того в прототипе не учитывается необходимая достаточность разгрузки с учетом продолжения текущего режима ориентации. Ведь в определенных случаях накоплений в системе СГ кинетический момент способствует проведению режима. Например, если в дальнейшем при проведении режима главный вектор внешнего возмущающего момента  будет направлен в сторону, противоположную той, которую он занимал уже при выполнении текущего режима, то накопленный кинетический момент увеличит продолжительность безрасходного (по топливу) управления до разгрузки СГ при помощи До (см. Раушенбах Б.В., Токарь Е.Н. Управление ориентацией КА. М.: Наука, 1974, с. 127).
будет направлен в сторону, противоположную той, которую он занимал уже при выполнении текущего режима, то накопленный кинетический момент увеличит продолжительность безрасходного (по топливу) управления до разгрузки СГ при помощи До (см. Раушенбах Б.В., Токарь Е.Н. Управление ориентацией КА. М.: Наука, 1974, с. 127).
Указанные недостатки способа-прототипа приводят к перерасходу рабочего тела в ДО при поддержании режимов ориентации с помощью СГ и применении ДО для разгрузки СГ от накопленного кинетического момента.
Техническим результатом, достигаемым изобретением, является уменьшение расхода рабочего тела в ДО КА для разгрузки СГ при поддержании заданной ориентации.
Указанный технический результат достигается тем, что в способе управления КА с помощью реактивных исполнительных органов при поддержании заданной ориентации, включающем измерение параметров ориентации опорного физического базиса, измерение вектора абсолютной угловой скорости КА, поддержание ориентации космического аппарата по указанным измеренным значениям с помощью СГ, измерение текущих значений вектора кинетического момента в системе СГ, определение суммарного вектора кинетического момента, а по нему и параметрам области располагаемых значений кинетического момента в СГ - момента времени насыщения системы (tso), определение в значениях суммарного вектора накопленного кинетического момента постоянной и периодической составляющих, разгрузку системы СГ с помощью реактивных ДО от указанной постоянной составляющей суммарного вектора накопленного кинетического момента i-ми импульсами, где i=0,1,2,3,..., путем одновременного приложения к корпусу КА разгрузочного момента от ДО минимальной длительности и равного, противоположно направленного момента от СГ, в момент начала поддержания ориентации to определяют временной отрезок [to, tso], сравнивают его с заданным интервалом поддержания ориентации и, если указанный отрезок меньше интервала, определяют на указанном отрезке направление единичного вектора постоянной составляющей прогнозируемых значений суммарного вектора кинетического момента в абсолютном инерциальном базисе, определяют в абсолютном инерциальном базисе покомпонентно для каждой проекции прогнозируемых значений суммарного вектора кинетического момента наклон прямой постоянного ухода значений проекции указанной составляющей по отношению к временной оси поддержания ориентации и границе области располагаемых значений вектора кинетического момента в системе СГ, определяют покомпонентно направление единичного вектора разгружаемого кинетического момента в абсолютном инерциальном базисе по направлению единичного вектора постоянной составляющей прогнозируемых значений суммарного вектора кинетического момента и наклону ухода постоянной составляющей прогнозируемых значений суммарного вектора кинетического момента по отношению к временной оси поддержания ориентации и границе области располагаемых значений вектора кинетического момента в СГ, при этом, если наклон указанной прямой компоненты указанного вектора направлен от временной оси к границе области или параллелен временной оси, то соответствующей компоненте единичного вектора разгружаемого кинетического момента присваивают соответствующее значение компоненты указанного единичного вектора постоянной составляющей суммарного вектора кинетического момента, а если наклон указанной прямой компоненты указанного вектора направлен от границы области к временной оси, то соответствующей компоненте единичного вектора разгружаемого кинетического момента присваивают значение, противоположное значению компоненты указанного единичного вектора постоянной составляющей суммарного вектора кинетического момента, определяют на этом же отрезке кинетические параметры ориентации связанного базиса относительно абсолютного инерциального базиса, при которых расход рабочего тела До на разгрузку системы СГ от единичного вектора разгружаемого кинетического момента определенного направления минимален, а в процессе поддержания ориентации по измеренным значениям параметров ориентации опорного физического базиса и угловой скорости корпуса КА определяют текущие кинетические параметры положения связанного базиса относительно абсолютного инерциального базиса, сравнивают текущие кинетические параметры с определенными и при их совпадении в момент времени t1 оптимальной, в смысле указанного минимального расхода рабочего тела реактивных двигателей ориентации, разгрузки, определяют отрезки [t1,tsiη] , где tsiη - моменты времени насыщения системы СГ, определенные с учетом начальных условий по суммарному вектору кинетического момента после прогнозируемой выдачи разгрузочных импульсов от ДО по η -ым осям связанного базиса X, Y, Z в момент времени t1, с учетом направлений, определенных проекциями единичного вектора разгружаемого кинетического момента, сравнивают их между собой и по наибольшему значению отрезка выбирают η -ю ось для проведения разгрузки, а после разгрузки определяют отрезок  , где
, где  - момент времени насыщения системы СГ, определенный с учетом начальных условий по суммарному вектору кинетического момента, полученным на момент окончания очередной i-ой разгрузки, сравнивают определенный отрезок с оставшимся в данном цикле разгрузок интервалом поддержания заданной ориентации и, если указанный отрезок меньше оставшегося интервала, проводят очередную i-ю разгрузку, каждый раз определяя η -ю ось разгрузки до тех пор пока очередной отрезок
- момент времени насыщения системы СГ, определенный с учетом начальных условий по суммарному вектору кинетического момента, полученным на момент окончания очередной i-ой разгрузки, сравнивают определенный отрезок с оставшимся в данном цикле разгрузок интервалом поддержания заданной ориентации и, если указанный отрезок меньше оставшегося интервала, проводят очередную i-ю разгрузку, каждый раз определяя η -ю ось разгрузки до тех пор пока очередной отрезок  не будет больше равен оставшемуся интервалу, при этом при каждым разгрузочным импульсом проверяют выполнение условия, при котором последующий прогнозируемый отрезок [t1, ts(i+1)] , после очередного i-го включения ДО, будет больше предыдущего отрезка
не будет больше равен оставшемуся интервалу, при этом при каждым разгрузочным импульсом проверяют выполнение условия, при котором последующий прогнозируемый отрезок [t1, ts(i+1)] , после очередного i-го включения ДО, будет больше предыдущего отрезка  , если указанное условие не выполняется, то разгрузку прекращают, фиксируют последнее значение tsi и продолжают поддержание заданной ориентации до момента времени t2, где t2 - момент времени оптимальной разгрузки на отрезке
, если указанное условие не выполняется, то разгрузку прекращают, фиксируют последнее значение tsi и продолжают поддержание заданной ориентации до момента времени t2, где t2 - момент времени оптимальной разгрузки на отрезке  , далее в момент времени t2 повторяют указанный цикл разгрузки системы СГ с помощью ДО до момента, когда очередной временной отрезок поддержания ориентации без включения ДО будет больше или равен оставшемуся интервалу ориентации, если указанное условие не выполняется, то повторяют циклы i-х разгрузок и поддержания ориентации до очередного момента времени оптимальной разгрузки и самой разгрузки СГ с помощью ДО до выполнения этого условия.
, далее в момент времени t2 повторяют указанный цикл разгрузки системы СГ с помощью ДО до момента, когда очередной временной отрезок поддержания ориентации без включения ДО будет больше или равен оставшемуся интервалу ориентации, если указанное условие не выполняется, то повторяют циклы i-х разгрузок и поддержания ориентации до очередного момента времени оптимальной разгрузки и самой разгрузки СГ с помощью ДО до выполнения этого условия.
В случае наличия нескольких равнозначных моментов времени оптимальной разгрузки предлагается выбирать первый из них по ходу времени поддержания заданной ориентации, а в оставшиеся - проверять по прогнозируемым суммарным значениям вектора кинетического момента выполнение условий, при которых отрезок, определяющий насыщение системы СГ, будет больше оставшегося интервала поддержания ориентации, если условие выполняется, продолжать поддержание заданной ориентации, а если нет - проводить цикл указанных i-х разгрузок СГ при помощи ДО.
В моменты времени оптимальной разгрузки предлагается уточнять значение единичного вектора разгружаемого кинетического момента по значениям суммарного вектора накопленного кинетического момента на отработанном интервале поддержания ориентации.
Введение новых признаков в предлагаемый "Способ..." позволяет достичь указанного технического результата.
При поддержании заданной инерциальной ориентации КА в абсолютном инерциальном базисе Iγ , оси связанного базиса будут занимать определенное положение, заданное, например, кватернионом разворота. Если указанное поддержание осуществлять при помощи системы СГ и выделить при этом постоянную составляющую из вектора-функции  , то она будет пропорционально расти в проекциях на оси связанного базиса по мере увеличения длительности поддержания ориентации. При проведении разгрузки СГ в этом случае выбор момента времени включения ДО не влияет на величину расхода рабочего тела, так как вектор, определяющий постоянную составляющую в
, то она будет пропорционально расти в проекциях на оси связанного базиса по мере увеличения длительности поддержания ориентации. При проведении разгрузки СГ в этом случае выбор момента времени включения ДО не влияет на величину расхода рабочего тела, так как вектор, определяющий постоянную составляющую в  и вектор, определяющий разгрузочный момент будут однозначно "привязаны" к осям связанного базиса.
и вектор, определяющий разгрузочный момент будут однозначно "привязаны" к осям связанного базиса.
Если провести переориентацию КА в другой инерциальный базис и допустить, что в процессе его разворота определенный интеграл от действия  равен нулю, то начальное значение вектора
равен нулю, то начальное значение вектора  на момент начала другой инерциальной ориентации в Iγ не изменится. Естественно, что не изменится величина этого значения и в связанном базисе, однако проекции этого вектора на оси связанного базиса будут уже другие. Следовательно и разгрузочный момент от ДО, противоположно направленный накопленному, будет иметь другие составляющие по осям связанного базиса. А отсюда следует, что и расход рабочего тела для "сброса" той же величины
на момент начала другой инерциальной ориентации в Iγ не изменится. Естественно, что не изменится величина этого значения и в связанном базисе, однако проекции этого вектора на оси связанного базиса будут уже другие. Следовательно и разгрузочный момент от ДО, противоположно направленный накопленному, будет иметь другие составляющие по осям связанного базиса. А отсюда следует, что и расход рабочего тела для "сброса" той же величины  будет другой.
будет другой.
На самом деле начальное значение вектора  как-то изменится за счет действия
как-то изменится за счет действия  в процессе разворота, однако поскольку речь идет о модуле одной и той же "сбрасываемой" величины, причем сбрасываемой по-разному (с разным сочетанием работы ДО), то приведенные рассуждения остаются в силе и для этого случая.
в процессе разворота, однако поскольку речь идет о модуле одной и той же "сбрасываемой" величины, причем сбрасываемой по-разному (с разным сочетанием работы ДО), то приведенные рассуждения остаются в силе и для этого случая.
При поддержании заданной ориентации КА с помощью СГ на опорный физический базис (на Землю, на Солнце, на опорную Звезду и т.д.), связанный базис вращается в Iγ за счет коррекции управления от датчика внешней ориентации (инфракрасной вертикали, солнечного, звездного датчиков и т.д.). При этом в Iγ можно определить изменяющиеся значения  и как относительно их будут располагаться оси связанного базиса в каждый момент времени.
и как относительно их будут располагаться оси связанного базиса в каждый момент времени.
Указанный в изобретении технический результат достигается за счет выбора момента времени, когда оси связанного базиса будут оптимальным образом расположены по отношению к установленному значению той части вектора  , от которой необходимо разгрузить систему СГ (разгружаемого вектора). Причем под "оптимальным" понимается случай, когда для разгрузки максимально используются ДО с наибольшими значениями Кэм. Использование ДО с наибольшими значениями Кэм [см. (1)] для разгрузки от одной и той же величины разгружаемого вектора приводит к наименьшим затратам рабочего тела. Причем при определении разгружаемого вектора учитывается направление наклона постоянной составляющей в
, от которой необходимо разгрузить систему СГ (разгружаемого вектора). Причем под "оптимальным" понимается случай, когда для разгрузки максимально используются ДО с наибольшими значениями Кэм. Использование ДО с наибольшими значениями Кэм [см. (1)] для разгрузки от одной и той же величины разгружаемого вектора приводит к наименьшим затратам рабочего тела. Причем при определении разгружаемого вектора учитывается направление наклона постоянной составляющей в  по отношению к продольной временной оси поддержания ориентации и границе области S. Это позволяет выбрать необходимое направление разгрузки в области S с учетом продолжения текущего режима (произвести перевод
по отношению к продольной временной оси поддержания ориентации и границе области S. Это позволяет выбрать необходимое направление разгрузки в области S с учетом продолжения текущего режима (произвести перевод  от границы области S или наоборот, к ее границе). Кроме того, в процессе разгрузки выдается минимально необходимое число импульсов ДО, т.е. реализуется принцип необходимой достаточности разгрузки для завершения режима на одних СГ.
от границы области S или наоборот, к ее границе). Кроме того, в процессе разгрузки выдается минимально необходимое число импульсов ДО, т.е. реализуется принцип необходимой достаточности разгрузки для завершения режима на одних СГ.
Для пояснения сути изобретения рассмотрим, например, управление ориентацией орбитального комплекса (ОК) "Мир" при проведении эксперимента "Рентген" 19.04.1988 г. Информация о динамике ОК, управляемого СГ, подробно приведена в работе "Математическое обеспечение автоматизированного планирования исследований на орбитальном комплексе "Мир", авторы Беляев М.Ю. и др. Космические исследования, том XXVII, вып. 1, 1989, с. 126-134. Пользуясь доступностью данного материала как для авторов, так и для экспертизы, рассмотрим динамику изменений вектора кинетического момента в системе СГ при выполнении программы полета (см. рис. 1,2 указанной работы, а также фиг. 1).
Интервал программы полета (22.20.00, 23.30.00) включал в себя:
1) гравитационную разгрузку ОК;
2) разворот ОК на выбранную точку фона;
3) инерциальную ориентацию на точку фона;
4) разворот на исследуемый объект;
5) инерциальную ориентацию на исследуемый объект.
Соответствующим временным участкам режимов ориентации соответствует график изменения H(t), т.е. представлен график модуля вектора  , изменяющегося в системе СГ. Причем рассмотрены как измеренные, так и прогнозируемые его значения.
, изменяющегося в системе СГ. Причем рассмотрены как измеренные, так и прогнозируемые его значения.
Рассмотрим режим гравитационной разгрузки на интервале (22.20.00, 22.43.00). Суть данного режима заключается в том, чтобы за счет поворотов корпуса КА направить по-возможности вектор действующего на него гравитационного момента  противоположно постоянной составляющей вектора накопленного кинетического момента в системе СГ. Известно, что
противоположно постоянной составляющей вектора накопленного кинетического момента в системе СГ. Известно, что  направлен перпендикулярно плоскости, образованной продольной осью КА "гантельного типа" и его радиус-вектором. При этом
направлен перпендикулярно плоскости, образованной продольной осью КА "гантельного типа" и его радиус-вектором. При этом  стремится повернуть КА по кратчайшему пути до совмещения указанной оси с радиус-вектором (см., например, Бауэлл Б.К. Управление количеством движения космического летательного аппарата с помощью гравитационных моментов. Управление в пространстве. Труды IV Международного симпозиума ИФАК по автоматическому управлению в пространстве (Югославия, 1971), М.: Наука, 1973).
стремится повернуть КА по кратчайшему пути до совмещения указанной оси с радиус-вектором (см., например, Бауэлл Б.К. Управление количеством движения космического летательного аппарата с помощью гравитационных моментов. Управление в пространстве. Труды IV Международного симпозиума ИФАК по автоматическому управлению в пространстве (Югославия, 1971), М.: Наука, 1973).
Указанное совмещение двух векторов достигается за счет разворотов КА относительно орбитального базиса (ОБ) и дальнейшего поддержания ориентации в указанном положении. Однако за счет того, что не всегда удается полностью провести совмещение разгрузочного и разгружаемого векторов на одной линии и удержание КА в таком положении, а также по причине действия на корпус КА и других составляющих  в частности магнитного и аэродинамического моментов, приходится периодически изменять ориентацию в ОБ. При этом не строится каждый раз опорный ОБ и осуществляется относительно его разворот, а производится коррекция связанного базиса путем определения положения КА в других опорных физических базисах (для ОК "Мир" - два раза за один виток), относительно которых известно положение орбитального и осуществляется дальнейший необходимый перерасчет. В частности на ОК "Мир" такими базисами наиболее часто являются магнитный (построенный по магнитному полю Земли) и различные солнечно-звездные базисы.
в частности магнитного и аэродинамического моментов, приходится периодически изменять ориентацию в ОБ. При этом не строится каждый раз опорный ОБ и осуществляется относительно его разворот, а производится коррекция связанного базиса путем определения положения КА в других опорных физических базисах (для ОК "Мир" - два раза за один виток), относительно которых известно положение орбитального и осуществляется дальнейший необходимый перерасчет. В частности на ОК "Мир" такими базисами наиболее часто являются магнитный (построенный по магнитному полю Земли) и различные солнечно-звездные базисы.
На ОК "Мир" путем моделирования режимов ориентации, выбран 12-минутный интервал для уточнения в режиме гравитационной разгрузки необходимого положения связанного базиса относительно ОБ. Таким образом, на интервале (22.20, 22.43) по меньшей мере один раз уточнялась ориентация.
Вектор кинетического момента корпуса КА  в Iγ поддерживался постоянным на всем интервале разгрузки (за исключением разворотов) и был равен
в Iγ поддерживался постоянным на всем интервале разгрузки (за исключением разворотов) и был равен ,
,
где
I - тензор инерции ОК; - вектор орбитальной угловой скорости ОК.
- вектор орбитальной угловой скорости ОК.
Поэтому можно рассматривать, в качестве примера, при анализе динамического процесса одну из составляющих значений  , а именно
, а именно  .
.
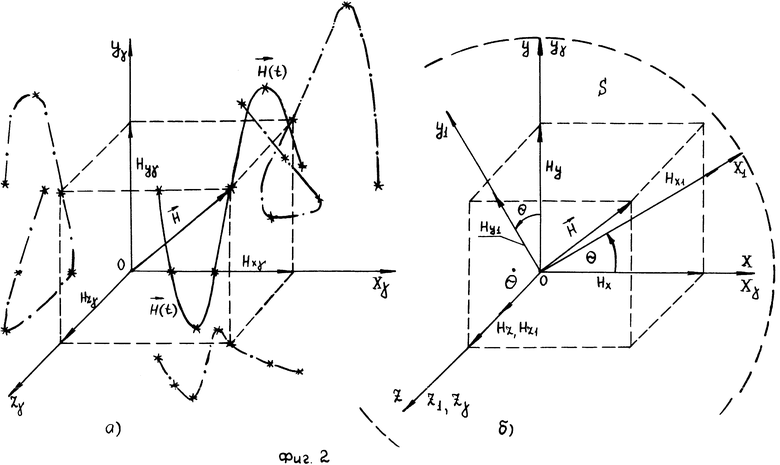
Представим себе, что значения  на указанном интервале будут иметь в Iγ вид, представленный на фиг. 2а), где введены следующие обозначения:
на указанном интервале будут иметь в Iγ вид, представленный на фиг. 2а), где введены следующие обозначения:
ΟXγ,OYγ,OZγ - оси базиса Iγ ; - значения вектора-функции кинетического момента в системе СГ, модули которых определены на фиг. 1.
- значения вектора-функции кинетического момента в системе СГ, модули которых определены на фиг. 1.
На фиг. 2а представлены также проекции указанного вектора на плоскости, образованные осями базиса iγ и значение вектора  , определяющего постоянную составляющую вектора-функции
, определяющего постоянную составляющую вектора-функции  . При этом в Iγ вектор
. При этом в Iγ вектор  определен проекциями Hxγ,Hyγ,Hzγ , полученными по выражению:
определен проекциями Hxγ,Hyγ,Hzγ , полученными по выражению:
где
Hmin, Hmax - экстремальные значения функции H(t), полученные из графика фиг. 1 на рассматриваемом временном интервале; - значение единичного вектора, задающего направление среднего значения H, определяется из вектора-функции
- значение единичного вектора, задающего направление среднего значения H, определяется из вектора-функции  , по моменту времени t', соответствующему
, по моменту времени t', соответствующему  , при этом
, при этом  .
.
Как видно из фиг. 1, постоянная составляющая значений H(t) за счет режимов гравитационной разгрузки имеет горизонтальный вид. Поэтому ее можно определить одним средним значением.
Пусть например, в один из моментов времени базисы Iγ и связанный совпадают, см. фиг. 2б, где связанный базис представлен осями OX, OY, OZ. А в процессе поддержания гравитационной разгрузки по результатам коррекций связанного базиса относительно физических опорных базисов и уточнений текущей ориентации КА в ОБ, возникала необходимость совершить один поворот КА по тангажу на угол Θ . Тогда оси связанного базиса займут по отношению к Iγ новое положение, обозначенное как OX1, OY1, OZ1 (см. фиг. 2б). В первом случае вектор  , будет иметь проекции на оси связанного базиса Hx, Hy, Hz, а во втором - проекции Hx1, Hy1, Hz1. Кроме этого на фиг. 2б пунктиром показана граница области S располагаемых значений вектора кинетического момента в системе СГ, имеющая форму сферы радиусом R.
, будет иметь проекции на оси связанного базиса Hx, Hy, Hz, а во втором - проекции Hx1, Hy1, Hz1. Кроме этого на фиг. 2б пунктиром показана граница области S располагаемых значений вектора кинетического момента в системе СГ, имеющая форму сферы радиусом R.
Допустим, необходимо разгрузить систему СГ от вектора  . Тогда в первом случае расход рабочего тела Q1 будет равен:
. Тогда в первом случае расход рабочего тела Q1 будет равен:
Q1 = Hx/K1 + Hy/K2 + Hz/K3
где
K1, K2, K3 - коэффициенты Kэм относительно осей OX, OY, OZ,
а во втором случае - Q2:
Q2 = Hx1/K1 + Hy1/K2 + Hz1/K3
Естественно, что для сокращения расхода рабочего тела в ДО на разгрузку СГ необходимо выбрать случай с меньшим значением Q.
Рассмотрен пример управления с двумя возможными вариантами разгрузки. При этом коррекция связанного базиса относительно опорного физического базиса осуществляется периодически. В случае же поддержания ориентации с непрерывным управлением ориентацией связанного базиса от датчика внешней информации таких случаев намного больше, так как вектор абсолютной угловой скорости КА  не равен нулю и может принимать различные значения (связанный базис КА вращается в абсолютном инерциальном базисе).
не равен нулю и может принимать различные значения (связанный базис КА вращается в абсолютном инерциальном базисе).
На фиг. 2 рассмотрена графически суть решаемой задачи. Далее рассмотрим общий случай математического решения.
Исходными в постановке задачи являются заданный режим ориентации КА, включающий измерение параметров ориентации опорного физического базиса и коррекцию по нему связанного базиса. Задана также длительность режима. По указанным данным, а также по инерционным, аэродинамическим и др. характеристикам КА, используя известные расчетные зависимости, приведенные в описании аналога, прототипа и источников информации, можно прогнозировать изменения вектора  в связанном базисе.
в связанном базисе.
Рассмотрим для примера в качестве опорного ОБ.
На борту КА, система управления движением которого построена на принципах БИНС - бескарданных инерциально-навигационных систем (см. Раушенбах Б.В., Токарь Е.Н., Управление ориентацией КА., М.: Наука, 1974, с. 101 - 105), как правило известны кинетические параметры, задающие преобразование базиса Iγ в орбитальный. На ОК "Мир" такое преобразования обеспечивает кватернион L(t) (см. Бранец В. Н., Шмыглевский И.П. Применение кватернионов в задачах ориентации твердого тела. И.: Наука, 1973). В случае выполнения программного разворота КА относительно орбитального базиса известен кватернион RZ, задающий преобразование орбитального базиса в связанный на момент времени окончания разворота. В свою очередь по кватернионам L(t) и RZ можно определить кватернион N(t), задающий преобразование Iγ в связанный базис.
N(t) = L(t)oRZ
Пусть необходимо поддерживать орбитальную ориентацию ОК "Мир" с заданным программным разворотом на интервале (t0, tк), где tк - момент времени окончания поддержания заданной ориентации. Тогда, спрогнозировав значения вектора-функции  , переводим их в Iγ по выражению:
, переводим их в Iγ по выражению:
где - кватернион, сопряженный кватерниону N(t).
- кватернион, сопряженный кватерниону N(t).
По результатам прогноза определяем момент времени насыщения системы СГ tso. Указанному моменту соответствует равенство модуля текущего значения  , например, радиус R вписанной в область S сферы.
, например, радиус R вписанной в область S сферы.
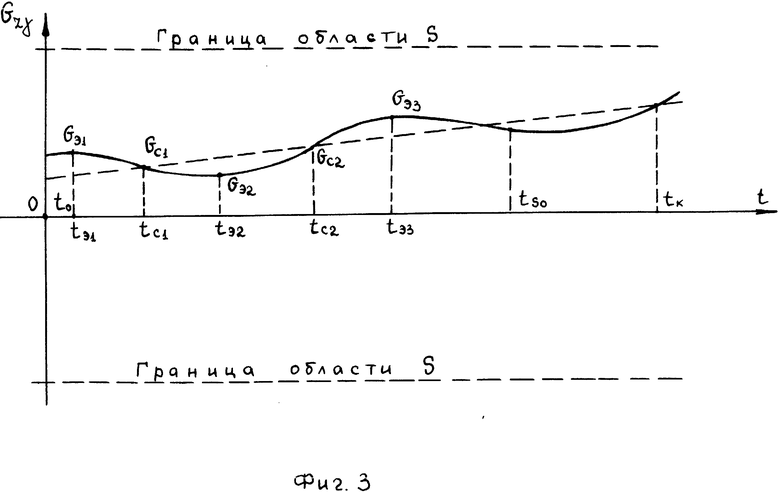
Далее сравниваем временной отрезок [to, tso] с заданным интервалом (to, tk) и если отрезок меньше интервала определяем направление постоянной составляющей  . Для этого рассмотрим график изменения одной из проекций
. Для этого рассмотрим график изменения одной из проекций  , см. фиг. 3.
, см. фиг. 3.
На фиг. 3 показан график прогнозируемого изменения Gzγ(t) на интервале (to, tk), при этом пунктиром показан постоянный уход значений проекции вектора. Момент времени tso не всегда соответствует выходу графика на границу области S, так как насыщение определяется по текущим значениям модуля вектора  .
.
Указанный постоянный уход с достаточной степенью точности можно аппроксимировать прямой линией. Для этого определяем экстремальные значения Gzγ϶ . На фиг. 3 этим значениям Qэ1,2,3 соответствует моменты времени tэ1,2,3. Далее определяем точки перегиба графика Gc1 и Gc2:
Gc1 = (Gэ1 + Gэ2)/2, Gc2 = (Gэ2 + Gэ3)/2,
По указанным значениям определяем соответствующие им моменты времени tc1 и tc2. Известные точки A1(tc1, Gc1) и A2(tc2, Gc2) позволяют записать уравнение искомой прямой:
(t-tc1)/(tc2-tc1) = (Gzγp-Gc1)/(Gc2-Gc1) (8)
Следовательно, для любого момента времени t, принадлежащего интервалу (to, tk), можно получить по выражению (8) значение постоянной составляющей Gzγp .
проанализировать графики Gxγ(t) и Gyγ(t) аналогично определяем линейной зависимости Gxγp(t) и Gyγp(t) .
Полученные зависимости Gxγp(t), Gyγp(t) и Gzγp(t) позволяют получить значение единичного вектора  по выражению:
по выражению:
где
Gηpγ - значения компонент вектора  на фиксированный момент времени tso. Момент времени tso выбран как пример для исключения частного случая
на фиксированный момент времени tso. Момент времени tso выбран как пример для исключения частного случая  .
.
Значение вектора  не окончательно определяет значение единичного вектора разгружаемого кинетического момента, так как не учитывается наклон полученной по выражению (8) прямой по отношению к продольной временной оси поддержания ориентации и направлению к границе области S. А указанный наклон определяет будет накопленное значение постоянной составляющей вектора
не окончательно определяет значение единичного вектора разгружаемого кинетического момента, так как не учитывается наклон полученной по выражению (8) прямой по отношению к продольной временной оси поддержания ориентации и направлению к границе области S. А указанный наклон определяет будет накопленное значение постоянной составляющей вектора  способствовать увеличению продолжительности безрасходного (до момента времени tso управления КА с помощью СГ или нет.
способствовать увеличению продолжительности безрасходного (до момента времени tso управления КА с помощью СГ или нет.
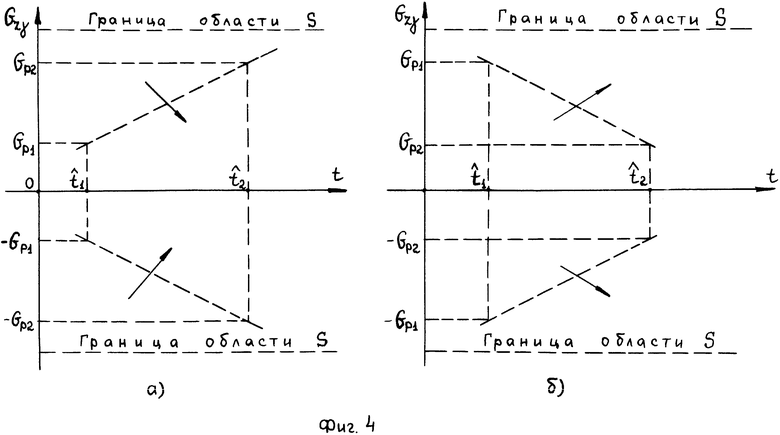
Для окончательного определения единичного вектора разгружаемого кинетического момента выбираем два значения проекции вектора  одного знака, например,
одного знака, например,  произвольные моменты времени, выбранные на оси Ot, см. фиг. 4, для которых выполняется условие
произвольные моменты времени, выбранные на оси Ot, см. фиг. 4, для которых выполняется условие  . Далее сравниваем эти значения
. Далее сравниваем эти значения
и, если условие (10) выполняется, то соответствующей проекции единичного вектора разгружаемого кинетического момента gzpγ, , присваиваем значение g′zpγ, , полученное из выражения (9). Тем самым выбираем направление разгрузки "внутрь области S", см. фиг. 4а), где стрелками показано направление смещения постоянной составляющей компоненты Gzγ. . Как видно из фиг. 4а), в данном случае уменьшение значений компоненты приводит к увеличению ее запаса для "безрасходного" проведения последующего режима.
В случае невыполнения условия (10), gzpγ присваиваем значение - g′zpγ , тем самым выбираем направление разгрузки от центра к границе области S, (см. фиг. 4б). Как бы "нагружая" систему СГ по вектору кинетического момента при помощи ДО, мы увеличиваем его запас на последующий режим. В дальнейшем полученное значение будет скомпенсировано действием  на корпусе КА при поддержании ориентации с использованием СГ на оставшемся интервале.
на корпусе КА при поддержании ориентации с использованием СГ на оставшемся интервале.
Аналогичным образом выбираем и остальные компоненты единичного вектора разгружаемого кинетического момента gxpγ и gypγ .
Следовательно, векторы  не всегда могут совпадать.
не всегда могут совпадать.
Далее определяем текущие значения вектора  в проекциях на оси связанного базиса:
в проекциях на оси связанного базиса:
Для получения кватерниона N(t) (см. (5)) необходимо моделировать движение ОБ относительно Iγ , определяя тем самым расчетные текущие значения кватерниона L(t). Такая модель существует, в частности на борту ОК "Мир".
По  строится зависимость коэффициента относительного расхода топлива
строится зависимость коэффициента относительного расхода топлива  .
.
Для этого на каждый момент времени t рассчитывается значение: .
.
Выражение (12) характеризует расход рабочего тела ДО на единицу разгружаемого вектора кинетического момента в зависимости от выбора момента времени разгрузки t. Следовательно значению qmin будет соответствовать и минимальный расход рабочего тела в ДО для конкретного заданного значения модуля вектора Iγ .
По qmin определяем момент времени tm, которому в свою очередь соответствуют кинетические параметры ориентации связанного базиса относительно Iγ . Для рассматриваемого примера это расчетное значение кватерниона Lm.
Как уже отмечалось, в процессе поддержания ориентации производится коррекция в определении положения связанного базиса относительно  . При этом используются показания как с датчиков внешней информации, так и с датчиков угловой скорости КА. В конкретном примере это позволяет по указанным измеренным значениям определять в каждый момент времени текущие значения кватерниона L'(t). Путем сравнения L'(t) с Lm определяем момент времени начала разгрузки, которому соответствует совпадение указанных кватернионов.
. При этом используются показания как с датчиков внешней информации, так и с датчиков угловой скорости КА. В конкретном примере это позволяет по указанным измеренным значениям определять в каждый момент времени текущие значения кватерниона L'(t). Путем сравнения L'(t) с Lm определяем момент времени начала разгрузки, которому соответствует совпадение указанных кватернионов.
В момент времени t1 оптимальной разгрузки, соответствующий qmin (или Lm), направление вектора  необходимо по-возможности уточнять исходя из предыдущих полученных значений
необходимо по-возможности уточнять исходя из предыдущих полученных значений  , начиная с момента времени to. Для этого используются те же расчетные выражения (5)-(11). Если полученных значений
, начиная с момента времени to. Для этого используются те же расчетные выражения (5)-(11). Если полученных значений  может оказаться недостаточно для определения постоянной составляющей, то могут использоваться прогнозируемые значения этого же вектора, дополняющие полученные.
может оказаться недостаточно для определения постоянной составляющей, то могут использоваться прогнозируемые значения этого же вектора, дополняющие полученные.
Использование  при определении
при определении  позволяет уменьшить значение расчетной ошибки, связанной с моделированием процесса ориентации. При этом по полученным значениям
позволяет уменьшить значение расчетной ошибки, связанной с моделированием процесса ориентации. При этом по полученным значениям  после определения η уточняется также модель прогноза изменения значений указанного вектора для оставшегося интервала ориентации.
после определения η уточняется также модель прогноза изменения значений указанного вектора для оставшегося интервала ориентации.
Выбрав момент времени начала разгрузки, определяем η = x,y,z -ю ось связанного базиса, где  относительно которой начинаем разгрузку. Для этого известно направление единичного вектора разгружаемого кинетического момента в связанном базисе
относительно которой начинаем разгрузку. Для этого известно направление единичного вектора разгружаемого кинетического момента в связанном базисе  .
.
Из условия разгрузки СГ, противоположно каждой компоненте вектора Mη направлен по соответствующей оси связанного базиса вектор разгрузочного момента от ДО. Величины разгрузочных моментов ΔGη известны. Известно также минимальное значение кинетического момента ΔGη = signMηΔt (13), по каждой оси, на которое будет произведена разгрузка:
Δt ,
где - величина минимального импульса ДО,
- величина минимального импульса ДО,
sign - значение знака, выбранное с учетом направления компонент вектора  и условия разгрузки СГ.
и условия разгрузки СГ.
Определим начальные условия для вектора  по выражению
по выражению ,
,
где - измеренное значение вектора-функции
- измеренное значение вектора-функции  в момент времени t1;
в момент времени t1; - измеренное значение угловой скорости корпуса КА;
- измеренное значение угловой скорости корпуса КА; - требуемое значение угловой скорости коррекции на момент времени t1, формируемое по результатам измерений параметров ориентации опорного физического базиса.
- требуемое значение угловой скорости коррекции на момент времени t1, формируемое по результатам измерений параметров ориентации опорного физического базиса.
При поддержании ОБ на ОК "Мир"
Далее поочередно вычитаем из каждой компоненты вектора ΔGη. соответствующие значения [t1,tsiη] . При этом, по каждому из значений вектора суммарного кинетического момента, определяющему новые начальные условия, путем моделирования режима дальнейшего поддержания ориентации с помощью СГ, определяем отрезки tsiη , где η - момент времени насыщения системы СГ после прогнозируемой разгрузки по отдельной η -й оси. Чем больше указанный отрезок, тем дольше "безрасходное" поддержание ориентации. Следуя постановке задачи  -е направление, обеспечивающее значение этого отрезка, будет иметь наибольший приоритет для разгрузки. В данном случае технический результат, направленный на "...уменьшение расхода рабочего тела в ДО", достигается за счет увеличения продолжительности "безрасходного" поддержания ориентации.
-е направление, обеспечивающее значение этого отрезка, будет иметь наибольший приоритет для разгрузки. В данном случае технический результат, направленный на "...уменьшение расхода рабочего тела в ДО", достигается за счет увеличения продолжительности "безрасходного" поддержания ориентации.
Выдав первый разгрузочный импульс, из i-й серии, где i=1,2,3,..., по установленной оси, определяем по аналогии с выражением (14) реально полученные начальные условия по  . Далее определяем отрезок [t1,tsiη] - момент времени насыщения системы СГ, определенный с учетом указанных начальных условий. Уточнение отрезка [t1, tsi] после разгрузки, по сравнению с отрезком
. Далее определяем отрезок [t1,tsiη] - момент времени насыщения системы СГ, определенный с учетом указанных начальных условий. Уточнение отрезка [t1, tsi] после разгрузки, по сравнению с отрезком  до разгрузки, необходимо проводить из-за ошибки в определении величины выданного импульса. На точность определения влияют, например, разброс в значениях номинальной тяги ДО (до 10%), упругие характеристики выдвижной штанги ДО и т.д. Поэтому при определении η-ю используются реально измеренные значения величин, определяющих значения указанных в формуле (14) векторов.
до разгрузки, необходимо проводить из-за ошибки в определении величины выданного импульса. На точность определения влияют, например, разброс в значениях номинальной тяги ДО (до 10%), упругие характеристики выдвижной штанги ДО и т.д. Поэтому при определении η-ю используются реально измеренные значения величин, определяющих значения указанных в формуле (14) векторов.
Если полученный отрезок [t1, tsi] больше оставшегося интервала (t1, tk) или равен ему, см. фиг. 3, то одним импульсом задача разгрузки решена. В противном случае определяем  ось для следующей i-ой разгрузки, проводим эту разгрузку, проверяем условие ее достаточности и т.д. до решения задачи разгрузки.
ось для следующей i-ой разгрузки, проводим эту разгрузку, проверяем условие ее достаточности и т.д. до решения задачи разгрузки.
Однако за один цикл i-х разгрузок решить задачу не всегда удается, так как существует определенный предел разгрузки, границы которого заданы параметрами области S. Начальные условия по η после каждого (i+1)-го импульса ДО не должны приводить к "насыщению" указанной области до расчетных моментов времени tsi. Поэтому перед каждым разгрузочным i-м импульсом, после выбора  -го направления, проверяем выполнение условия
-го направления, проверяем выполнение условия
[t1, ts(i+1)] > [t1, tsi],
где
ts(i+1) - момент времени насыщения системы СГ после (i+1)-го импульса ДО.
Если это условие выполняется, то есть смысл в продолжении разгрузки. Иначе "насыщение" системы СГ наступит раньше, чем оно определено моментом времени tsi, т.е. уменьшится продолжительность "безрасходного" поддержания ориентации.
Как видно из неравенства (15), в общем случае значение i моет быть равно нулю, i=0. В таком случае разгрузки не потребуется, поскольку не выполняется условие
[t1, ts1] > [t1, tso].
Это означает, что разгрузка приводит к уменьшению первоначальной длительности "безрасходного" поддержания ориентации или равна ей.
Если условие (15) не выполняется и задача разгрузки не решена, то фиксируем последнее значение  и определяем на отрезке
и определяем на отрезке  момент времени t2 (по аналогии с t1) оптимальной разгрузки. А в процессе поддержания ориентации фиксируем момент времени t2 и повторяем цикл i-х разгрузок СГ с помощью ДО до решения задачи разгрузки. Если и во втором случае не удается решить задачу разгрузки, то определяем на отрезке [t2, tsi] момент времени оптимальной разгрузки t3 и т.д. Таким образом циклируем определение момента времени оптимальной разгрузки и самой разгрузки СГ с помощью ДО до решения задачи разгрузки для "безрасходного" поддержания ориентации на оставшемся интервале.
момент времени t2 (по аналогии с t1) оптимальной разгрузки. А в процессе поддержания ориентации фиксируем момент времени t2 и повторяем цикл i-х разгрузок СГ с помощью ДО до решения задачи разгрузки. Если и во втором случае не удается решить задачу разгрузки, то определяем на отрезке [t2, tsi] момент времени оптимальной разгрузки t3 и т.д. Таким образом циклируем определение момента времени оптимальной разгрузки и самой разгрузки СГ с помощью ДО до решения задачи разгрузки для "безрасходного" поддержания ориентации на оставшемся интервале.
При этом за счет выбора оптимального сочетания ДО для разгрузки (через определение минимальных затрат для разгрузки единичного вектора разгружаемого момента), выбора направления разгружаемого вектора и минимально необходимого числа включений ДО для достижения цели "безрасходного" поддержания ориентации, удается минимизировать затраты рабочего тела на текущий режим поддержания ориентации.
На отрезках, определяющих насыщение системы СГ, в принципе возможно наличие нескольких равнозначных моментов времени оптимальной разгрузки, например  и т.д. В этом случае предлагается для разгрузки использовать первый из них по ходу времени поддержания заданной ориентации. В остальные моменты времени уточняется единичный вектор разгружаемого кинетического момента, исходя из реальных начальных условий по
и т.д. В этом случае предлагается для разгрузки использовать первый из них по ходу времени поддержания заданной ориентации. В остальные моменты времени уточняется единичный вектор разгружаемого кинетического момента, исходя из реальных начальных условий по  , полученных на указанные моменты времени. Далее проверяется также выполнение условий "безрасходного" управления КА, при которых отрезки
, полученных на указанные моменты времени. Далее проверяется также выполнение условий "безрасходного" управления КА, при которых отрезки  и т.д. больше интервалов
и т.д. больше интервалов  и т.д. В случае невыполнения указанного условия в моменты времени
и т.д. В случае невыполнения указанного условия в моменты времени  и т.д. проводим цикл указанных ранее i-х разгрузок, иначе продолжаем поддержание заданной ориентации.
и т.д. проводим цикл указанных ранее i-х разгрузок, иначе продолжаем поддержание заданной ориентации.
Указанные уточнения необходимы из-за расхождения прогнозируемых и реальных значений  . Они проводятся и в случаях отсутствия моментов времени t', t'' и т. д. Однако при включении ДО в других случаях разгрузка будет "вынужденной", без учета ранее рассмотренных факторов ее оптимальности.
. Они проводятся и в случаях отсутствия моментов времени t', t'' и т. д. Однако при включении ДО в других случаях разгрузка будет "вынужденной", без учета ранее рассмотренных факторов ее оптимальности.
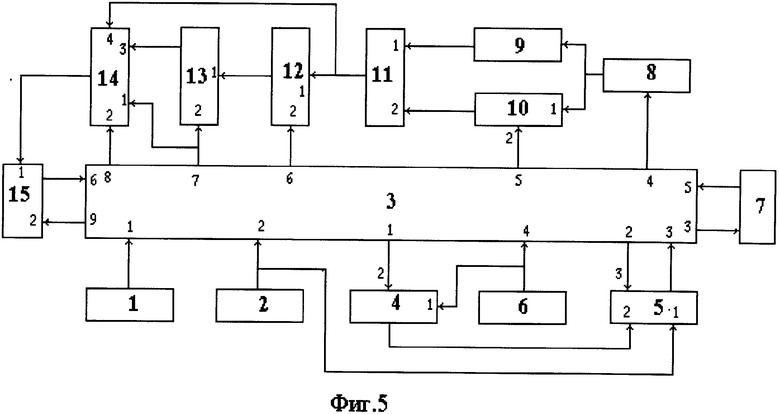
На фиг. 5 представлена блок-схема системы управления ориентацией КА, реализующая предлагаемый способ, при этом введены следующие обозначения: 1 - блок датчиков внешней информации (БДВИ); 2 - блок задания параметров КА и внешней среды (БЗПКАИВС); 3 - блок оценки динамического состояния КА, внешней среды и системы управления (БОСКАВССУ); 4 - блок сравнения прогнозируемых и располагаемых значений кинетического момента (БСПРЗКМ); 5 - блок силовых гироскопов (БСГ); 6 - блок датчиков угловой скорости (БДУС); 7 - блок двигателей ориентации (БДО); 8 - блок определения постоянной составляющей в значениях суммарного вектора кинетического момента (БОПСЗСВКМ); 9 - блок определения наклона постоянной составляющей (БОНПС); 10 - блок определения единичного вектора постоянной составляющей (БОЕВПС); 11 - блок определения единичного вектора разгружаемого кинетического момента (БОЕВРКМ); 12 - блок определения кинематических параметров оптимальной разгрузки (БОКПОР); 13 - блок сравнения текущих и определенных кинетических параметров (БСТОКМ); 14 - блок определения единичного вектора разгружаемого кинетического момента по значениям суммарного вектора кинетического момента на отработанном интервале (БОЕВРКМНОИ); 15 - блок прогноза направления разгрузки СГ (БПНРСГ).
При этом выход БДВИ1 соединен с первым входом БОСКАВССУ 3, а выход ВЗПКАИВС 2 - со вторым входом БОСКАВССУ 3 и первым входом БСГ 1. Выход БСГ 1 соединен с третьим входом БОСКАВССУ 3, а выход БДУС 6 соединен с четвертым входом БОСКАВССУ 3 и первым входом БСПРЗКМ 4. Первый выход БОСКАВССУ 3 соединен со вторым входом БСПРЗКМ 4, а выход БСПРЗКМ 4 - со вторым входом БСГ5. БОСКАВССУ 3 своим выходом соединен с третьим входом БСГ 5. Выход БДО 7 соединен с пятым входом БОСКАВССУ 3, а третий выход БОСКАВССУ3 соединен с входом БДО 7.
Указанные блоки и их функциональные связи с подробными примерами реализации представлены в описании заявки N 5032611/22 от 17.03.92 "Система управления ориентацией КА с СГ" (авторы Ковтун В.С., Платонов В.Н. и др., патент Российской Федерации 2006430 С1). При этом в состав БОСКАВССУ 3 включены дополнительно два других блока. Блок прогнозируемых значений вектора кинетического момента системы СГ (блок 7 в описании патента) и блок определения временных интервалов для проведения экспериментов и определения кинематических параметров для ориентации (блок 8 в описании патента). Блоки 7, 8 в указанной "Системе..." функционально объединены с БОСКАВССУ3. Перечень решаемых в них совместных задач аналогичен задачам, решаемым при реализации предлагаемого "Способа...".
Кроме этого для новых блоков введены следующие функциональные связи. Четвертый выход БОСКАВССУ 3 соединен с входом БОПСЗСВКМ 8, а выход БОПСЗСВКМ 8 соединен с входом БОНПС 9 и первым входом БОЕВПС 10. Со вторым входом БОЕВПС 10 соединен пятый выход БОСКАВССУ 3. Выход БОНПС 9 соединен с первым входом БОЕВРКМ 11, а со вторым входом этого же блока соединен выход БОЕВПС 10. Выход БОЕВРКМ 11 соединен с первым входом БОКПОР 12, а со вторым входом этого же блока соединен шестой выход БОСКАВССУ 3. Кроме того выход БОЕВРКМ 11 соединен с четвертым входом БОЕВРКМНОИ 14. Выход БОКПОР 12 соединен с первым входом БСТОКМ 13, а со вторым входом этого же блока соединен седьмой выход БОСКАВССУ 3. Кроме этого указанный седьмой выход БОСКАВССУ 3 соединен с первым входом БОЕВРКМНОИ 14, а со вторым и третьим входами этого же блока соединены соответственно восьмой выход БОСКАВССУ 3 и выход БСТОКМ 13. Выход БОЕВРКМНОИ 14 соединен с первым входом БПНРСГ 15. А со вторым входом этого же блока соединен девятый выход БОСКАВССУ 3. В свою очередь выход БПНРСГ 15 соединен с шестым входом БОСКАВССУ 3.
Блоки 8-15 могут быть реализованы бортовой цифровой вычислительной машиной (ЦВМ) "Салют-5Б", установленный на ОК "Мир".
На фиг. 6 показан пример такой реализации на базе одного из процессоров по типу трехканального исполнения ЦВМ "Электроника" МС 1201.02-02 (см. ТО ШИ3.059.064-02 микро-ЭВМ "Электроника") с дополнительными контролерами ввода-вывода, при этом введены обозначения: 16 - тактовый генератора (ТГ); 17 - процессор (П); 18 - дешифратор адреса (ДША); 19 - устройство ввода-вывода (УВВ).
ШД(16) - трехстабильная двунаправленная 16-ти разрядная шина данных; ША(16) - трехстабильная однонаправленная 16-ти разрядная шина адреса; ШУ(10) - шина управления (10 линий сигналов управления).
Блоки 8-15 набраны из стандартных ПЗУ емкостью 2кБайт, при этом число стандартных ПЗУ определяется объемом алгоритма решаемой в блоке задачи, си Петросян О. А. и др. Схемотехника БИС ПЗУ.М.: Радио и связь, 1987, с. 115-117. Функциональные связи между блоками 8-15 реализованы за счет трезканального исполнения - через шины данных, адреса и управления. Через УВВ 19 осуществляется функциональная связь четвертого-девятого выходов БОСКАВССУ 3 с соответствующими им входами блоков 8-15, а также выхода БВНРСГ 15 с шестью входом БОСКАВССУ 3.
Работает система при реализации предложенного способа следующим образом.
При помощи блоков 1-7 и их связей реализуется заложенная в программу системы управления движения (СУД) логика управления ориентацией КА, которая включает в себя три основные функции:
1) построение требуемой ориентации КА;
2) поддержание заданной ориентации;
3) формирование команд для разгрузки СГ.
Подробно работа СУД приведена в описании указанной "Системы управления ориентацией КА и СГ", с. 3-15.
При этом по измеренным параметрам ориентации опорного физического базиса, получаемым с БДВИ 1 и угловой скорости, измеряемой при помощи БДУС 6, кинематический и динамический контуры СУД, реализуемые в БОСКАВССУ 3, поддерживают заданную ориентацию КА. В момент начала поддержания ориентации to, который фиксируется, как правило, кинематическим контуром СУД в конце построения ориентации определяется момент времени tso. Для этого используются в БОСКАВССУ 3 прогнозируемые значения вектора кинетического момента системы СГ, прогнозируемые значения вектора угловой скорости КА с учетом угловой скорости коррекции и значение тензора инерции КА. Получение прогнозируемого значения вектора  , по указанным данным с использованием известных алгоритмов, производится также в БОСКАВССУ 3. Далее по полученным значениям
, по указанным данным с использованием известных алгоритмов, производится также в БОСКАВССУ 3. Далее по полученным значениям  в БСПРЗКМ 4 определяем непосредственно значение момента времени tso.
в БСПРЗКМ 4 определяем непосредственно значение момента времени tso.
Момент времени tk может задаваться в БОСКАВССУ 3 как командой управления с Земли при помощи БЗПКАИВС 2, так и бортовыми программами управления, реализуемыми "блоком определения временных интервалов для проведения экспериментов...", входящим в состав БОСКАВССУ 3.
В БОСКАВССУ 3 сравниваем полученный отрезок [to, tso] с интервалов (to, tk) и , если отрезок меньше указанного интервала, при помощи программы БИНС переводим полученные значения Iγ в  например, по выражению (6) и далее покомпонентно передаем их в БОПСЗСВКМ 8. Там по логике, реализующей выражения (7, 8), определяются искомые прямые линии постоянной составляющей вектора
например, по выражению (6) и далее покомпонентно передаем их в БОПСЗСВКМ 8. Там по логике, реализующей выражения (7, 8), определяются искомые прямые линии постоянной составляющей вектора  .
.
Выражения, определяющие искомые, прямые передаются из БОПСЗСВКМ 8 в БОНПС 9 и БОЕВПС 10.
В БОНПС 9 в соответствии с выражением (10) проверяются условия, определяющие наклоны постоянных составляющих в каждой из проекций вектора g′ηpγ . А в БОВПС 10 определяются компоненты Gηpγ , см.(9). При этом из пятого выхода БОСКАВССУ 3 в блок БОЕВПС 10 поступает информация о значении момента времени tso, для выбора значений g′ηpγ .
В БОЕВРКМ 11 в соответствии с признаками, характеризующими выполнение условий (10), получаемыми через первый вход из БОНПС 9, присваиваются знаки "+" или "-" значениям  , получаемым через второй вход из БОЕВПС 10. Таким образом на выходе БОЕВРКМ 11 формируются компоненты вектора
, получаемым через второй вход из БОЕВПС 10. Таким образом на выходе БОЕВРКМ 11 формируются компоненты вектора  .
.
Значение вектора  поступает на первый вход БОКПОР 12, а на второй вход этого же блока из БОСКАВССУ 3 поступают прогнозируемые значения кватернионов L(t) и RZ для определения кватерниона N(t) см. (5). В БОКПОР 12 определяются текущие положения вектора
поступает на первый вход БОКПОР 12, а на второй вход этого же блока из БОСКАВССУ 3 поступают прогнозируемые значения кватернионов L(t) и RZ для определения кватерниона N(t) см. (5). В БОКПОР 12 определяются текущие положения вектора  в проекциях на оси связанного базиса
в проекциях на оси связанного базиса  , согласно (11). Далее по ним определяется функциональная зависимость g(t), см. (12), из которой в свою очередь выделяется gmin, с соответствующим ему моментом времени tm. По tm в полученных значениях кватернионов L(t) отыскивается значение Lm, которое пересылается на вход БСТОКМ 13.
, согласно (11). Далее по ним определяется функциональная зависимость g(t), см. (12), из которой в свою очередь выделяется gmin, с соответствующим ему моментом времени tm. По tm в полученных значениях кватернионов L(t) отыскивается значение Lm, которое пересылается на вход БСТОКМ 13.
В БСТОКМ 13 производится сравнение кватернионов L'(t) с Lm. При этом значение L'(t) поступает на второй вход БСТОКМ 13 с седьмого выхода БОСКАВССУ 3. С этого же выхода БОСКАВССУ 3 поступают значения L'(t) на первый выход БОЕВРКМНОИ 14.
При совпадении L'(t) и Lm в момент времени t1 на третий вход БОЕВРКМНОИ 14 поступает сигнал о начале разгрузки СГ при помощи ДО. На второй вход этого же блока из восьмого выхода БОСКАВССУ 3, начиная с момента времени to, поступают значения вектора  . В БОЕВРКМНОИ 14 производится определение
. В БОЕВРКМНОИ 14 производится определение  по выражениям (5) - (11). При этом изначально в выражение (5) подставляются значения кватерниона L'(t), а в (6) - значения
по выражениям (5) - (11). При этом изначально в выражение (5) подставляются значения кватерниона L'(t), а в (6) - значения  . В случае, если значений L'(t) и
. В случае, если значений L'(t) и  недостаточно для определения
недостаточно для определения  , из-за непродолжительности отработанного интервала режима поддержания ориентации, в указанном блоке через четвертый вход записывается ранее полученное расчетное значение этого же вектора из БОЕВРКМ 11.
, из-за непродолжительности отработанного интервала режима поддержания ориентации, в указанном блоке через четвертый вход записывается ранее полученное расчетное значение этого же вектора из БОЕВРКМ 11.
Таким образом на выходе БОЕВРКМНОИ 14 формируется значение вектора  , которое передается на первых вход БПНРСГ 15. А на второй вход этого же блока, из девятого выхода БОСКАВССУ 3 выдается значение ΔGη = ΔGx,ΔGy,ΔGz , см. (14).
, которое передается на первых вход БПНРСГ 15. А на второй вход этого же блока, из девятого выхода БОСКАВССУ 3 выдается значение ΔGη = ΔGx,ΔGy,ΔGz , см. (14).
В БПНРСГ 15 определяются значения  согласно (13) и прогнозируемые значения векторов суммарного кинетического момента:
согласно (13) и прогнозируемые значения векторов суммарного кинетического момента:
Полученные значения векторов ΔGη, выдаются в БОСКАВССУ 3, где определяются отрезки [t1, ts1x], [t1, tsly] и [t1, tslz]. Далее из указанных отрезков выбирается максимальный [t1, ts1], для которого проверяется условие (15)'. Если оно выполняется, то по оси, определенной указанным отрезком, выдается первый разгрузочный импульс. При этом направление выдаваемого импульса определяется знаком в соответствующем значении  см. (13), значение которого передается из БПНРСГ 15 одновременно с вектором в БОСКАВССУ 3.
см. (13), значение которого передается из БПНРСГ 15 одновременно с вектором в БОСКАВССУ 3.
Если условие (15)' не выполняется, выбирается очередной отрезок из указанных трех и проводится разгрузка по оси, определенной этим отрезком. В случае не выполнения условия для всех трех отрезков разгрузка не проводится вовсе.
После первого разгрузочного импульса с использованием ДО в БОСКАВССУ 3 определяется значение вектора  по измеренным значениям величин. Далее это значение используется в качестве начальных условий для определения отрезка
по измеренным значениям величин. Далее это значение используется в качестве начальных условий для определения отрезка  . Если полученный отрезок будет больше или равен оставшемуся интервалу поддержания ориентации, то разгрузка СГ на этом заканчивается. В противном случае из БОСКАВССУ 3 в БПНРСГ 15 выдается новое значение
. Если полученный отрезок будет больше или равен оставшемуся интервалу поддержания ориентации, то разгрузка СГ на этом заканчивается. В противном случае из БОСКАВССУ 3 в БПНРСГ 15 выдается новое значение  , где по нему определяются значения векторов кинетического момента
, где по нему определяются значения векторов кинетического момента  . При этом используются выражения (16), с подстановкой вместо
. При этом используются выражения (16), с подстановкой вместо  вектора
вектора  . По полученным значениям
. По полученным значениям  определяются отрезки [t1, ts2x] , [t1, ts2y] и [t1, ts2z]. Далее выбирается максимальный отрезок [t1, ts2], для которого согласно (15) проверяется условие
определяются отрезки [t1, ts2x] , [t1, ts2y] и [t1, ts2z]. Далее выбирается максимальный отрезок [t1, ts2], для которого согласно (15) проверяется условие
[t1, ts2] > [t1, ts1].
Затем при необходимости повторяется цикл указанных проверочных условий и т.д. до выполнения условия разгрузки.
Если условие разгрузки достичь не удалось по невыполнению условия (15), то в БОСКАВССУ 3 фиксируется последнее значение  . Далее определяется системой момент времени t2 оптимальной разгрузки на отрезке
. Далее определяется системой момент времени t2 оптимальной разгрузки на отрезке  и повторяется цикл i-x разгрузок СГ при помощи ДО по достижению этого момента времени.
и повторяется цикл i-x разгрузок СГ при помощи ДО по достижению этого момента времени.
Таким образом система циклирует определение момента времени оптимальной разгрузки и самой разгрузки СГ с помощью ДО до выполнения условия "безрасходного" поддержания ориентации на оставшемся интервале.
В случае наличия нескольких равнозначных моментов времени оптимальной разгрузки  и т.д., система автоматически их "распознает" при определении Lm на последующих, после очередного цикла разгрузки, интервалах. Так, например, если
и т.д., система автоматически их "распознает" при определении Lm на последующих, после очередного цикла разгрузки, интервалах. Так, например, если
то момент времени оптимальной разгрузки 
Изобретение направлено на уменьшение расхода рабочего тела в ДО при поддержании режимов ориентации с помощью СГ и применении ДО для разгрузки СГ от накопленного кинетического момента.
В настоящее время на борту ОК "Мир" установлена выносная двигательная установка (ВДУ), которая позволяет увеличить длину плеча одного из ДО примерно на 10 м. Аналогично типа ВДУ предполагается установить и на международной космической станции "Альфа", при этом длина плеча ДО будет увеличена до 100 м. Известно, что расход топлива в ДО при выдаче им номинальных управляющих моментов в том числе и при разгрузке СГ обратно пропорционален длине плеча действия их тяги. Предложенный "Способ управления..." дает возможность более эффективно (в плане экономии топлива) использовать ВДУ для разгрузки СГ от накопленного кинетического момента.
Анализ программы полета показал, что на один режим поддержания ориентации ОК "Мир" и ОБ в течение одного витка с использованием СГ и ДО экономится от 5 до 40% расходуемого топлива на разгрузку СГ. При этом величина экономии расходуемого топлива зависит от углов разворота ОК "Мир" относительно ОБ. Это позволило, в частности расширить на ≈ 10% допустимый диапазон в выборе углов ориентации на проведение экспериментов с поддержанием заданной ориентации в ОБ. Такие ограничения на проведение экспериментов существуют из-за повышенного расхода топлива при установленном его лимите на выполнение программы полета в целом.

Изобретение относится к управлению угловым движением космических аппаратов (КА) с помощью силовых гироскопов (СГ) и реактивных двигателей ориентации (ДО). В предлагаемом способе осуществляют циклы импульсной разгрузки СГ (РСГ), в которых измеряют параметры ориентации и углового движения КА, отслеживают изменения вектора кинетического момента в системе СГ, определяют время насыщения СГ по осям связанного с КА базиса и время проведения оптимальной (с миним. расходом топлива ДО) РСГ, выбирают ось РСГ, соответствующую максим. разности указанных времен, а после РСГ сравнивают отрезок времени от момента оптимальной РСГ до насыщения СГ с оставшимся интервалом поддержания ориентации КА и, если этот интервал больше указанного отрезка, проводят очередную РСГ при условии, что следующий прогнозируемый отрезок насыщения СГ больше предыдущего; в противном случае поддерживают без РСГ заданную ориентацию КА до вновь определяемого момента оптимальной РСГ. Способ позволяет уменьшить расход рабочего тела на поддержание заданной ориентации КА. 2 з.п. ф-лы, 6 ил.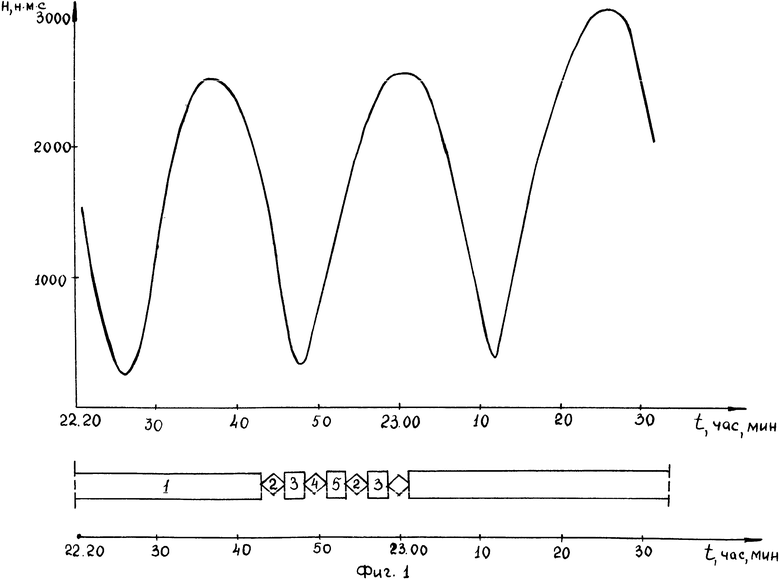
 где
где  момент времени насыщения системы силовых гироскопов, определенный с учетом начальных условий по суммарному вектору кинетического момента, полученным на момент окончания очередной i-й разгрузки, сравнивают определенный отрезок с оставшимся в данном цикле разгрузок интервалом поддержания заданной ориентации и, если указанный отрезок меньше этого оставшегося интервала, проводят очередную i-ю разгрузку, каждый раз определяя n-ю ось разгрузки, до тех пор, пока очередной отрезок
момент времени насыщения системы силовых гироскопов, определенный с учетом начальных условий по суммарному вектору кинетического момента, полученным на момент окончания очередной i-й разгрузки, сравнивают определенный отрезок с оставшимся в данном цикле разгрузок интервалом поддержания заданной ориентации и, если указанный отрезок меньше этого оставшегося интервала, проводят очередную i-ю разгрузку, каждый раз определяя n-ю ось разгрузки, до тех пор, пока очередной отрезок  не будет больше или равен указанному оставшемуся интервалу, при этом перед каждым разгрузочным импульсом проверяют выполнение условия, при котором последующий прогнозируемый отрезок
не будет больше или равен указанному оставшемуся интервалу, при этом перед каждым разгрузочным импульсом проверяют выполнение условия, при котором последующий прогнозируемый отрезок  после очередного i-го включения реактивных двигателей ориентации, будет больше предыдущего отрезка
после очередного i-го включения реактивных двигателей ориентации, будет больше предыдущего отрезка  если указанное условие не выполняется, то разгрузку прекращают, фиксируют последнее значение
если указанное условие не выполняется, то разгрузку прекращают, фиксируют последнее значение  и продолжают поддержание заданной ориентации до момента времени t2, где t2 - момент времени оптимальной разгрузки на отрезке
и продолжают поддержание заданной ориентации до момента времени t2, где t2 - момент времени оптимальной разгрузки на отрезке  далее, в момент времени t2, повторяют вышеуказанный цикл разгрузки системы силовых гироскопов с помощью реактивных двигателей ориентации до момента, когда очередной временной отрезок поддержания ориентации без включения реактивных двигателей будет больше или равен оставшемуся интервалу поддержания ориентации, если указанное условие не выполняется, то повторяют циклы i-х разгрузок и поддержания ориентации до очередного определения момента времени указанной оптимальной разгрузки и проведения самой разгрузки силовых гироскопов с помощью реактивных двигателей ориентации - до выполнения указанного условия.
далее, в момент времени t2, повторяют вышеуказанный цикл разгрузки системы силовых гироскопов с помощью реактивных двигателей ориентации до момента, когда очередной временной отрезок поддержания ориентации без включения реактивных двигателей будет больше или равен оставшемуся интервалу поддержания ориентации, если указанное условие не выполняется, то повторяют циклы i-х разгрузок и поддержания ориентации до очередного определения момента времени указанной оптимальной разгрузки и проведения самой разгрузки силовых гироскопов с помощью реактивных двигателей ориентации - до выполнения указанного условия.
