Изобретение относится к строительству, а более конкретно, к вибрационным машинам для погружения свай, используемых при строительстве промышленно-гражданских, транспортных и других объектов.
Известен вибропогружатель, содержащий корпус, жестко соединенный с захватывающим сваю устройством, смонтированные в корпусе валы с дебалансами, связанные друг с другом с возможностью синхронизации, и привод дебалансов (см. например, SU N 1696644, кл. E 02 D 7/18, 1989). Привод вибропогружателя, состоящий из электродвигателя с зубчатыми шестернями, наличие в его конструкции механизма изменения статического момента, также включающего электродвигатель с зубчатыми шестернями, придают вибропогружателю громоздкость, увеличивают его вес и энергоемкость, усложняют его эксплуатацию.
Более близким к предлагаемому техническому решению является вибропогружатель с нерегулируемым статическим моментом, содержащий корпус, жестко соединенный с захватывающим сваю устройством, смонтированные в корпусе залы с дебалансами, связанные друг с другом с возможностью синхронизации, и привод валов с дебалансами, состоящий из гидронасоса и гидромотора (см. например, EP 0116164 B1, E 02 D 7/18, 1988). Вибропогружатель снабжен виброгасителем, посредством которого корпус вибропогружателя гибко соединен со стрелой подъемного крана (с базовою машиной). Конструкция виброгасителя обеспечивает виброизоляцию базовой машины, но за счет снижения и ограничения диапазона скоростей снижает технические возможности применения вибропогружателя. Кроме того, применение виброгасителя сложной конструкции является неоправданно дорогостоящим техническим решением.
Технический результат изобретения повышение предельной погружающей способности вибропогружателя с нерегулируемыми дебалансами в зависимости от характеристик участвующих в процессе погружения сваи всех звеньев динамической системы.
Это достигается тем, что в вибропогружателе, содержащем корпус, жестко соединенный с захватывающим сваю устройством, смонтированные в корпусе валы с дебалансами, связанные друг с другом с возможностью синхронизации, и привод валов с дебалансами, состоящий из гидронасоса и гидромотора, гидронасос снабжен регулятором мощности и предохранительным клапаном, а гидромотор - согласующим редуктором, установленным между валом гидромотора и валами с дебалансами, при этом передаточное число согласующего редуктора, параметры погружаемой сваи, грунта, дебалансов, гидронасоса, гидромотора связаны следующей зависимостью: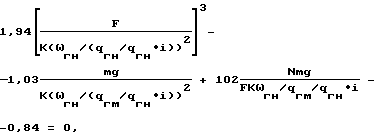
где:
F сопротивление погружению сваи по боковой поверхности (определяется по известным зависимостям для наиболее тяжелого для погружения сваи грунта - глины с консистенцией 0,2);
m масса вибропогружателя со сваей;
g ускорение силы тяжести;
N мощность гидронасоса (определяется установкой регулятора мощности);
ωгн скорость вращения вала гидронасоса;
qгн номинальный рабочий объем гидронасоса;
qгм номинальный рабочий объем гидромотора;
K статический момент масс дебалансов;
i передаточное число согласующего редуктора.
В отличие от ближайшего аналога повышение предельной погружающей способности вибропогружателя достигается тем, что привод дебалансов осуществляется от регулируемого в режиме постоянной мощности гидронасоса при установке согласующего редуктора с передаточным числом i, обеспечивающего автоматическую адаптацию параметров вибропогружателя к изменяющимся грунтовым условиям и глубине погружения и снижение воздействия динамических усилий на базовую машину.
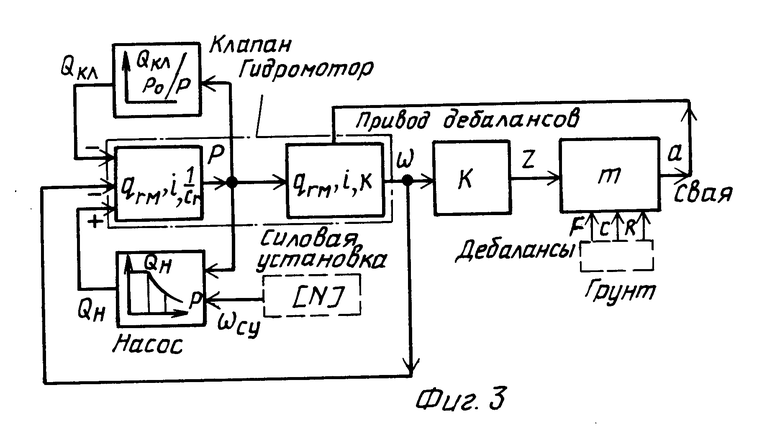
На фиг. 1 изображен вибропогружатель с погружаемой сваей; на фиг. 2 - вибропогружатель с захватывающим сваю устройством, в разрезе; на фиг. 3 - структурная схема системы вибропогружателя; на фиг. 4 графическое изображение режима работы гидропривода.
Вибропогружатель состоит из корпуса 1, жестко соединенного с захватывающим сваю устройством 2, в которое закрепляют сваю 3. В корпусе смонтированы залы 4 с дебалансами 5, привод которых осуществляется гидромотором 6 через согласующий редуктор 7 с передаточным числом i. Вращение вала гидромотора обеспечивается работающим от силовой установки гидронасосом 8 с регулятором мощности и предохранительным клапаном (на чертеже не показаны). Гидронасос и силовая установка расположены на базовой машине. В качестве силовой установки обычно используют дизельный, либо электрический двигатель.
Как видно из структурной схемы на фиг. 3 вибропогружатель с приводом и свая образуют сложную систему, состоящую из отдельных динамических: звеньев, связанных прямым и обратным связями. На основании исследования различных режимов вибропогружения установлено, что наибольшей погружающею способности вибропогружателя в пределах ограничений по мощности и массе соответствуют режимы, при которых скорость вращения валов дебалансов не становится меньше критической, определяемой параметрами глубины погружения и самого грунта. Свойства системы при заданном функциональном назначении определяются выбором структурных звеньев, их параметрами и установленной между ними зависимостью, выраженной вышеприведенной на стр. 2 формулой. Структурная схема системы вибропогружателя включает следующие основные звенья и характеризующие их параметры:
гидронасос с приводом от силовой установки, у которого расход Qгн функционально зависит от давления P в гидросистеме и скорости вращения вала ωгн при ωгн Const зависимость Qai f(P) выражена тремя участками:
Qгн Qгнmax Const при P ≅ P1;
Qгн Qгнmin Const при P ≥ P1;
где
[N] номинальная мощность гидронасоса с регулятором мощности при ωгм Const,
P1 и P2 давления, соответствующие границам диапазона характеристик постоянной мощности насоса;
предохранительный клапан с расходом Qкл, зависящим от давления P в гидросистеме;
Qкл 0 при P ≅ P0;
Qкл (P P0)•Sкл при P > P0,
где
P0 давление открытия клапана;
Sкл параметр характеристики клапана, определяющий возрастание давления в системе при увеличении расхода;
гидромотор с номинальным рабочим объемом qгм, вращающий через cогласующий редуктор с передаточным числом i валы дебалансов со скоростью ω определяемой зависимостью:
и давлением P, определяемым зависимостью: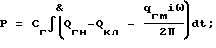
где
J момент инерции масс дебалансов;
g ускорение силы тяжести;
a ускорение колебаний сваи;
K статический момент масс дебалансов;
Cг приведенная гидравлическая жесткость гидросистемы;
дебалансы, вращающиеся со скоростью ω и создающие возмущающую силу Z, передающуюся через корпус вибропогружателя на сваю и направленную вдоль оси ее:
Z = K•ω2cosΦ, где ω = ωгм/i,
где
Φ угол подъема дебалансов;
Z возмущающая сила дебалансов;
w скорость вращения валов с дебалансами;
wгм скорость вращения вала гидромотора;
i передаточное число редуктора;
вибропогружатель со сваей массой m, двигающейся с ускорением a под действием силы Z в грунте, создающем сопротивление F по боковым поверхностям сваи и R по торцу сваи.
Работа вибропогружателя осуществляется следующим образом.
Силовая установка вращает вал гидронасоса с регулятором мощности, который обеспечивает подачу рабочей жидкости в гидросистему и далее в гидромотор. Вращение вала гидромотора через согласующий редуктор с передаточным числом i передается на валы дебалансов, вращающиеся со скоростью ω создающий дебалансами возмущающую силу Z, заставляющую колебаться сваю в грунте с ускорением a. В результате на дебалансах возникает момент сопротивления движению Mc K(g-a), преодолеваемый гидроприводом при давлении P. Вследствие взаимосвязи звеньев динамической системы по давлению P, скорости ω ускорению a и зависимости расхода гидронасоса Qгн от давления P, ускорения a от скорости w последней от Qн система является замкнутой и обладает свойством саморегулирования.
K(g-a), преодолеваемый гидроприводом при давлении P. Вследствие взаимосвязи звеньев динамической системы по давлению P, скорости ω ускорению a и зависимости расхода гидронасоса Qгн от давления P, ускорения a от скорости w последней от Qн система является замкнутой и обладает свойством саморегулирования.
При изменении грунтовых условий и глубины погружения система переходит в новое равновесное устойчивое состояние с новым сочетанием параметров. При достижении предельной погружающей способности в результате возрастания F и R при заглублении сваи ускорение a резко снижается и уменьшается тормозящее действие ускорения a на вращение дебалансов, сопротивление вращению уменьшается и падает давление P в гидросистеме. В соответствии с принятой характеристикой гидронасоса при падении P увеличивается расход Qгн, возрастает скорость w вращения дебалансов и возмущающая сила Z, что приводит к увеличению ускорения a, а, следовательно, и скорости и амплитуды колебаний сваи. В результате погружение сваи продолжается и устанавливается новое устойчивое состояние, характеризуемое иным сочетанием параметров режима (  P'',
P'',  Z'', a'') при (F'',
Z'', a'') при (F'',  R''), но при соблюдении условия N'
R''), но при соблюдении условия N'  N в пределах характеристики постоянно, мощности насоса в диапазоне [P1 ≅ P ≅ P2]
N в пределах характеристики постоянно, мощности насоса в диапазоне [P1 ≅ P ≅ P2]
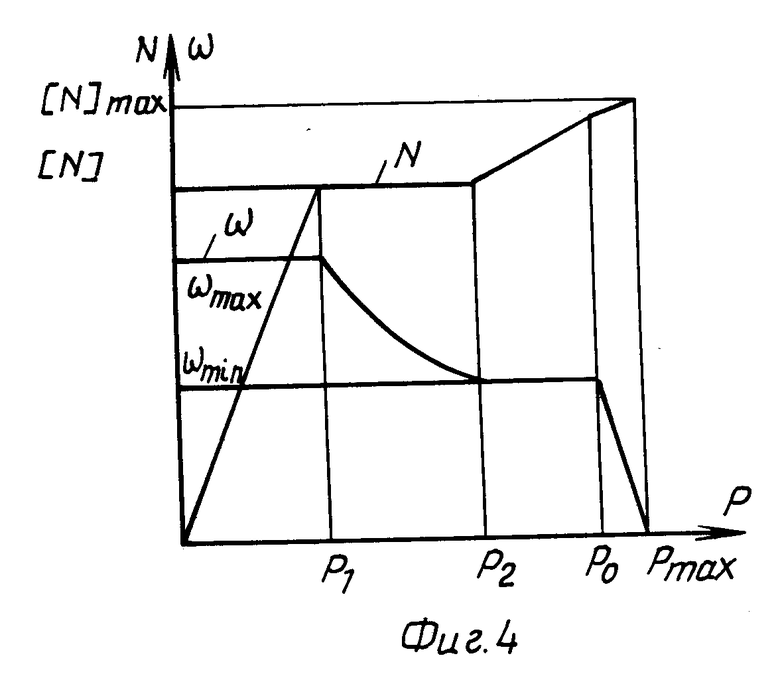
При выходе за пределы регулировочной характеристики N Const в зону меньших давлений P <P1 дебалансы вращаются с наибольшей постоянной частотой (ω = ωmax) при пропорциональном снижении мощности N P x[N]/P1.
При возрастании давления в диапазоне P2 < P < P0 дебалансы вращаются с минимальной постоянной частотой ω = ωmin
При возрастании мощности до максимально допустимой (фиг. 4) N P x[N]/P2 ≅ [N]max.
В предельном случае при дальнейшем увеличении давления срабатывает предохранительный клапан и частота вращения дебалансов снимается до значения, определяемого условием P ≈ P0 при Qкл > 0 и N  [N]max. Это состояние системы также устойчиво и может иметь место, в частности, при запуске вибропогружателя. На фиг. 4 представлена идеализированная выходная характеристика системы. Таким образом, все возможные состояния системы являются устойчивыми и при работе достигается эффект вращения дебалансов с наибольшей возможной скоростью в пределах ограничения по мощности N и в диапазоне ωmin ≅ ω ≅ ωmax при закрытом клапане и ω ≥ 0 при открытом клапане и, следовательно, достигается наибольшая возмущающая сила и амплитуда колебаний сваи. При прочих разных условиях в этом случае обеспечивается наибольшая погружающая способность вибропогружателя. При определенных параметрах звеньев системы в пределах установленной мощности согласование параметров режима (P, w Z, a) и характеристик сопротивления грунта (F, R, Cг) обеспечивается установкой согласующего редуктора с передаточным числом i, определяемых по предложенной формуле. Структурная схема показывает, что передаточное число i входит в любой замкнутый контур системы и определяет взаимосвязь давления и расходов, скорости и давления, ускорения и скорости, т.е. определяет основные характеристики системы.
[N]max. Это состояние системы также устойчиво и может иметь место, в частности, при запуске вибропогружателя. На фиг. 4 представлена идеализированная выходная характеристика системы. Таким образом, все возможные состояния системы являются устойчивыми и при работе достигается эффект вращения дебалансов с наибольшей возможной скоростью в пределах ограничения по мощности N и в диапазоне ωmin ≅ ω ≅ ωmax при закрытом клапане и ω ≥ 0 при открытом клапане и, следовательно, достигается наибольшая возмущающая сила и амплитуда колебаний сваи. При прочих разных условиях в этом случае обеспечивается наибольшая погружающая способность вибропогружателя. При определенных параметрах звеньев системы в пределах установленной мощности согласование параметров режима (P, w Z, a) и характеристик сопротивления грунта (F, R, Cг) обеспечивается установкой согласующего редуктора с передаточным числом i, определяемых по предложенной формуле. Структурная схема показывает, что передаточное число i входит в любой замкнутый контур системы и определяет взаимосвязь давления и расходов, скорости и давления, ускорения и скорости, т.е. определяет основные характеристики системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД РАБОЧЕГО ОРГАНА ЗЕМЛЕРОЙНОЙ МАШИНЫ | 1997 |
|
RU2112842C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 1996 |
|
RU2113616C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 1995 |
|
RU2075640C1 |
| ГУСЕНИЧНАЯ МАШИНА С ГИДРОСТАТИЧЕСКОЙ ИЛИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2545145C1 |
| КОВШ СКРЕПЕРА | 1997 |
|
RU2119995C1 |
| ТРАНСМИССИЯ ЭЛЕКТРОМОБИЛЯ | 1997 |
|
RU2123944C1 |
| ВИБРОПОГРУЖАТЕЛЬ С ИЗМЕНЯЕМЫМ РАССТОЯНИЕМ МЕЖДУ ОСЯМИ ДЕБАЛАНСОВ | 2016 |
|
RU2615544C1 |
| КОВШ СКРЕПЕРА | 1996 |
|
RU2114252C1 |
| ЦЕНТРОБЕЖНО-ВИБРАЦИОННЫЙ СПОСОБ РАЗДЕЛЕНИЯ СМЕСЕЙ | 1997 |
|
RU2128084C1 |
| ВИБРОМАШИНА | 2015 |
|
RU2600301C2 |

Использование: вибропогружение свай, используемых при строительстве промышленно-гражданских, транспортных и других объектов. Сущность изобретений: в вибропогружателе гидронасос снабжен регулятором мощности и предохранительным клапаном, гидромотор-согласующим редуктором, установленным между валом гидромотора и валами с дебалансами. При этом достигается предельная погружающая способность вибропогружателя при работе в пределах ограничения по мощности N в диапазоне ωmin ≅ ω ≅ ωmax скоростей вращения дебалансов при закрытом предохранительном клапане и ω ≥ 0 открытом клапане за счет согласования параметров режима работы и характеристик сопротивления грунта, обеспечиваемого установкой согласующего редуктора с передаточным числом i, определяемым по предложенной формуле. 4 ил.
Вибропогружатель, содержащий корпус, жестко соединенный с захватывающим сваю устройством, смонтированные в корпусе валы с дебалансами, связанные друг с другом с возможностью синхронизации, и привод валов с дебалансами, состоящий из гидронасоса и гидромотора, отличающийся тем, что гидронасос снабжен регулятором мощности и предохранительным клапаном, а гидромотор согласующим редуктором, установленным между валом гидромотора и валами с дебалансами, при этом передаточное число согласующего редуктора, параметры погружаемой сваи, грунта, дебалансов, гидронасоса, гидромотора связаны следующей зависимостью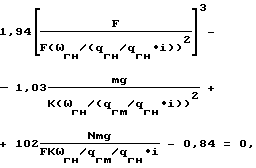
где F сопротивление погружению связи по боковой поверхности (определяется по известным зависимостям для наиболее тяжелого для погружения сваи грунта глины с консистенцией 0,2);
m масса вибропогружателя со сваей;
g ускорение силы тяжести;
N мощность гидронасоса (определяется установкой регулятора мощности);
ωгн - скорость вращения вала гидронасоса;
qгн номинальный рабочий объем гидронасоса;
qгм номинальный рабочий объем гидромотора;
K статический момент масс дебалансов;
i передаточное число согласующего редуктора.
| ЕР, патент, 0116164, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

