Изобретение относится к промышленным и сельскохозяйственным тракторам, бульдозерам, погрузчикам, экскаваторам и другим гусеничным самоходным рабочим машинам с гидростатической или электромеханической трансмиссией, предназначенным для выполнения землеройных, строительных, дорожных, сельскохозяйственных и других работ.
Известен гусеничный трактор с гидростатической трансмиссией, содержащий двигатель внутреннего сгорания (ДВС), три соединенных с ним гидронасоса, два из которых выполнены регулируемыми реверсивными и образующими гидроконтуры с соответствующими аксиально-поршневыми гидромоторами, которые установлены соосно с двухступенчатыми планетарными бортовыми редукторами, а третий гидронасос образует гидроконтур с гидроцилиндрами рабочих органов навесного оборудования трактора [1], [2].
Установка аксиально-поршневых гидромоторов, имеющих большую длину, соосно с бортовыми редукторами приводит к необходимости размещения этих гидромоторов в вырезах корпуса рамы. Кроме того, при применении двухступенчатого бортового редуктора с относительно небольшим передаточным отношением (I=55,4), необходимое тяговое усилие трактора может быть получено только в случае применения гидромотора с большим рабочим объемом, имеющим повышенные габаритные размеры.
В этом случае нижние поверхности гидромоторов, ограничивающие возможность увеличения высоты нижней поверхности корпуса (днища) трактора, расположены существенно ниже осей ведущих звездочек. По этой причине известный трактор имеет малую величину клиренса (дорожного просвета), что предопределяет его низкую проходимость.
Этот же недостаток имеет гусеничный трактор с электрической трансмиссией, содержащий ДВС, силовой генератор, два тяговых электродвигателя и блок управления, размещенные в раме трактора, а также бортовые редукторы и ходовую часть с ведущими и натяжными колесами. Каждый тяговый электродвигатель выполнен в едином блоке с бортовым редуктором и расположен на единой поперечной оси с ним и ведущим колесом ходовой части трактора [3].
Расположение тяговых электродвигателей, имеющих большие габаритные размеры, в вырезе рамы на одной поперечной оси с бортовыми редукторами и ведущими колесами (звездочками) ходовой части трактора приводит к малой величине расстояния между низко расположенными нижними поверхностями тяговых электродвигателей и поверхностью грунта. Это аналогичным образом приводит к малой величине клиренса. Небольшой клиренс в сочетании с отсутствием конструктивных решений, направленных на повышение проходимости трактора, предопределяет низкий уровень этой проходимости.
Задачей, на решение которой направленно изобретение, является создание гусеничной машины с гидростатической или электромеханической трансмиссией, обладающей высокой проходимостью. Техническим результатом, на достижение которого направлено изобретение во всех вариантах его исполнения, является повышение проходимости.
При реализации гусеничной машины с гидростатической или электромеханической трансмиссией, содержащей ДВС, установленный на остове или корпусе машины, по меньшей мере, один гидронасос или генератор трансмиссии, функционально соединенный с ДВС каким-либо способом и приспособленный для преобразования, по меньшей мере, части механической энергии ДВС в гидравлическую или электрическую энергию, два гидромотора или электромотора трансмиссии, приспособленные для преобразования этой гидравлической или электрической энергии в механическую энергию, два бортовых редуктора, последние ступени которых выполнены планетарными, размещены внутри гусеничного обвода и соединены с его ведущими звездочками, а входные валы бортовых редукторов функционально соединены с гидромоторами или электромоторами трансмиссии, а также систему электрооборудования, приспособленную для управления ДВС и/или трансмиссией, указанный технический результат достигается путем реализации одного или нескольких следующих технических решений в их любом сочетании:
1. Бортовые редукторы имеют не менее трех ступеней, причем их первые ступени выполнены в виде зубчатых цилиндрических или конических передач с эвольвентным или эксцентриково-циклоидальным зацеплением, или гипоидных передач, причем оси их малых колес расположены выше осей последних ступеней бортовых редукторов и ведущих звездочек гусеничной машины.
2. Соотношение между длиной и наружным диаметром электромоторов или гидромоторов трансмиссии оптимизировано по критерию максимальной проходимости гусеничной машины или выбрано из условия отсутствия ограничения этой проходимости с учетом влияния этого соотношения на клиренс, массу и удельное давление гусеничного движителя на грунт.
3. Расстояние по вертикали между осью ведущей звездочки и нижней поверхностью гидромотора или электромотора выбрано из условия обеспечения заданного клиренса гусеничной машины, а также опускания ведущей звездочки с гусеницей на грунт или установления угла наклона задней ведущей ветви гусеницы не более 6°.
4. Гидромоторы или электромоторы трансмиссии и система электрооборудования реализуют повороты гусеничной машины с полным использованием мощности ДВС и устанавливают необходимое соотношение между выходными моментами гидромоторов или электромоторов трансмиссии в зависимости от заданного радиуса поворота.
5. Система электрооборудования определяет величины буксования каждой гусеницы и далее формирует сигналы управления трансмиссией из условия ограничения этого буксования. Для этого система электрооборудования содержит микропроцессорный контроллер, датчик действительной скорости движения гусеничной машины и датчики угловой скорости валов бортовых редукторов. Микропроцессорный контроллер осуществляет вычисление и сравнение величин буксования каждой гусеницы с ее максимально допустимым значением, предварительно записанным в памяти его микроконтроллера, и далее формирует сигналы управления трансмиссией в зависимости от результатов этого сравнения из условия предотвращения максимально допустимой величины буксования каждой гусеницы.
6. Система электрооборудования определяет величину погружения гусениц в грунт и далее формирует сигналы управления трансмиссией из условия предотвращения увеличения этого погружения. Для этого система электрооборудования содержит микропроцессорный контроллер и ультразвуковой, радарный или электромеханический датчик положения остова или корпуса машины относительно грунта. Контроллер вычисляет глубину погружения гусениц в грунт с использованием сигналов этого датчика и далее формирует сигналы управления трансмиссией, реализуя блокирование или разрешение поворота, ограничение минимального радиуса поворота, ограничение выходного крутящего момента каждого гидромотора или электромотора или соотношения между этими моментами, в зависимости от глубины этого погружения.
7. Система электрооборудования формирует сигналы управления трансмиссией из условия ограничения величины и/или скорости нарастания крутящего момента гидромоторов или электромоторов при начале движения гусеничной машины или при увеличении ее скорости.
8. Составные части (устройства) системы электрооборудования, генератор и электромоторы, расположенные ниже возможной глубины преодолеваемого брода, выполнены водонепроницаемыми, а соединяющие их электрические кабели выполнены с возможностью сохранения регламентированного значения электрического сопротивления изоляции при длительном нахождении в условиях постоянного увлажнения. В частности, корпуса устройств системы электрооборудования, генератора и электромоторов, расположенных ниже возможной глубины преодолеваемого брода, имеют класс защиты от проникновения твердых предметов и воды не хуже, чем IP57 по стандарту МЭК 529 или ГОСТ 14254.
Альтернативные отличительные признаки независимого пункта формулы изобретения направлены на повышение проходимости гусеничной машины путем увеличения ее клиренса или длины опорной поверхности гусеничного движителя, предотвращения погружения гусениц в грунт при их буксовании или срыве верхнего слоя грунта в динамических режимах работы машины, уменьшения радиуса горизонтальной проходимости при повышенной длине опорной поверхности гусеничного движителя или увеличения глубины преодолеваемого брода. Влияние реализации каждого отличительного признака на указанный технический результат дополнительно показано ниже при описании различных вариантов реализации гусеничной машины.
На гусеничной машине может быть реализовано как одно техническое решение, соответствующее одному из альтернативных признаков независимого пункта формулы изобретения, так и одновременно несколько технических решений в различных комбинациях (сочетаниях), что обеспечивает достижение одного и того же технического результата. При этом достигаемый уровень повышения проходимости гусеничной машины зависит от выбора реализуемого альтернативного признака или их сочетания.
Из уровня техники неизвестно применение на гусеничных машинах с гидростатическими и электромеханическими трансмиссиями предложенных технических решений с целью повышения проходимости этих машин.
На чертеже приведен пример реализации гусеничной машины с электромеханической трансмиссией.
Она содержит двигатель внутреннего сгорания (ДВС) 1, установленный на остове или корпусе 2 гусеничной машины, генератор 3 трансмиссии, соединенный с ДВС 1 непосредственно, или через муфту, или через согласующий редуктор и муфту (на чертеже условно не показаны), два электромотора (именуемых также электродвигателями) 4, 5 трансмиссии, два бортовых редуктора 6, 7, последние ступени 8, 9 которых выполнены планетарными, размещены внутри гусеничного обвода (гусениц) 10, 11 и соединены с ведущими звездочками 12, 13.
Остов машины может иметь рамную, полурамную или безрамную конструкцию.
Входные валы 14, 15 бортовых редукторов непосредственно или через передаточные устройства, например муфты (на чертеже не показаны), механически соединены с электромоторами 4, 5 трансмиссии.
Бортовые редукторы 6, 7 имеют не менее трех ступеней, причем их первые ступени 16, 17 выполнены в виде зубчатых цилиндрических или конических передач с эвольвентным или эксцентриково-циклоидальным зацеплением. Могут быть применены гипоидные передачи. Оси их малых колес расположены выше осей последних ступеней бортовых редукторов 6, 7 и, соответственно, ведущих звездочек 12, 13 гусеничной машины.
Система электрооборудования машины, именуемая также системой контроля, защиты и управления, состоит из ее высоковольтной и низковольтной частей и предназначена для контроля режимов работы и управления ДВС, генератором 3 (при необходимости), электромоторами 4, 5 трансмиссии и приводом 18 рабочего оборудования, например гидравлическим приводом подъема/опускания и перекоса отвала бульдозера.
Эта система содержит электронные, преимущественно микропроцессорные контроллеры 19-22, включающие в себя их информационную и силовую части. Контроллеры могут именоваться также электронными блоками, устройствами управления, модулями и т.д. Они могут быть выполнены в виде конструктивно законченных (автономных) устройств или иметь встраиваемое исполнение. Контроллер 20 генератора может быть встроен в генератор 3, а контроллеры 21, 22 электромоторов - в эти электромоторы.
Один из контроллеров 20, 21, 22 либо дополнительно установленный главный контроллер 19 выполняет функции ведущего контроллера (координатора) системы электрооборудования. К нему подключены датчики 23 параметров работы гусеничной машины, в том числе датчик действительной скорости движения гусеничной машины (например, доплеровский), датчики угловой скорости валов бортовых редукторов или соединенных с ними гидромоторов или электрометров, датчик положения остова или корпуса 2 относительно поверхности грунта (ультразвуковой, радарный или электромеханический дальномер) и другие датчики, органы управления 24 движением и приводом рабочего оборудования 18, а также панель оператора (машиниста) с графическими, аналоговыми и/или дискретными индикаторами и сигнализаторами (на чертеже условно не показана).
Линии передачи информационных сигналов между контроллерами 19-22, датчиками 24, органами управления 24 и панелью оператора выполнены с использованием интерфейсов CAN, RS-485, LIN и т.д. Силовая высоковольтная шина трансмиссии, связывающая контроллеры 20, 21 и 22, имеющая, например, номинальное напряжение 550 В постоянного тока, на чертеже выделена жирными линиями.
Контроллер 20 генератора 3 может быть выполнен в виде выпрямителя, в том числе синхронного, а контроллеры 21, 22 электромоторов 4, 5 - в виде силовых частотных преобразователей, инверторов, коммутаторов и т.п.
На машине возможно объединение нескольких контроллеров в единый блок (модуль), либо их раздельное исполнение в зависимости от выполняемых функций и требований к компоновке машины. Эти контроллеры, а также генератор 3 и электродвигатели 4, 5, могут иметь систему жидкостного охлаждения, объединенную, в частности, с системой охлаждения ДВС 1.
Электродвигатели 4, 5 или бортовые редукторы 6, 7 имеют встроенные нормально замкнутые стояночные тормоза, управление которыми осуществляется от главного контроллера 19 или контроллеров 21, 22 электродвигателей 4, 5. Эти тормоза могут быть также выполнены в виде отдельных устройств и присоединены к соответствующим валам электромоторов 4, 5.
Машина может быть дополнительно оснащена накопителем электрической энергии, выполненным в виде аккумулятора и/или суперконденсатора, подключенного к силовой сети трансмиссии. В этом случае контроллеры 20, 21 и 22 обеспечивают передачу электрической энергии от генератора 3 или электродвигателей 4, 5 в этот накопитель энергии, а также последующую передачу этой накопленной энергии в электродвигатели 4, 5 в рабочем режиме машины.
Электродвигатели 4, 5 могут быть асинхронными частотно-управляемыми. Более предпочтительным является применение вентильных реактивных (индукторных, индукционных) электродвигателей (ВРД, ВИД, ВИРД) - трех или более фазных электродвигателей без магнитов и электромагнитов в роторе и статоре, управляемых электронными ключами. В англоязычной литературе они называются электродвигателями с переменным магнитным сопротивлением или «Switched Reluctance Motor (SRM)».
Перспективно также применение синхронных электродвигателей с постоянными магнитами в роторе, которые на английском языке называются «Permanent Magnet Synchronous Motor (PMSM)». Реже используется название «BrushLess Direct Current motor (BLDC)», что переводится, как «Бесщеточный мотор постоянного тока».
На гусеничной машине с гидростатической трансмиссией вместо генератора 3 устанавливается реверсивный регулируемый гидронасос или, что предпочтительнее, два гидронасоса, соединенных по тандемной схеме, а вместо электромоторов 4 и 5 - гидромоторы, например, регулируемые аксиально-поршневые. При этом может быть реализована гидравлическая схема с закрытым или открытым контуром.
В этом случае гидронасос (гидронасосы) трансмиссии соединяются с гидромоторами гидравлическими линиями. Контроллеры 20, 21, 22 на машине с гидростатической трансмиссией отсутствуют. Управление гидронасосом (гидронасосами) и гидромоторами осуществляет главный контроллер 19.
В остальном гусеничная машина с гидростатической трансмиссией не отличается от показанной на чертеже и описанной машины с электромеханической трансмиссией.
Гусеничная машина может дополнительно включать в себя различные дополнительные устройства, условно не показанные на чертеже. В том числе насос и радиатор системы охлаждения двигателя 1, генератора 3, электродвигателей 4, 5 и контроллеров 20, 21, 22, кондиционер, стартер, устройства (фары) рабочего освещения, стеклоочистители и т.д.
Гусеничная машина работает следующим образом.
Генератор 3 (на машине с электромеханической трансмиссией) или гидронасос (гидронасосы) (на машине с гидростатической трансмиссией) преобразует механическую энергию ДВС 1, соответственно, в электрическую или гидравлическую энергию.
Электрическая энергия, после выпрямления контроллером 20 генератора 3, через контроллеры 21, 22 поступает на электродвигатели 4, 5. Аналогичным образом, на машине с гидростатической (гидрообъемной) трансмиссией потоки рабочей жидкости поступают от насоса (насосов) на два гидромотора.
Тяговые электродвигатели 4, 5 или гидромоторы, получающие электрическую или гидравлическую энергию, преобразуют ее в механическую энергию и передают вращающий момент на бортовые редукторы 6, 7 и далее на ведущие звездочки 12, 13 и гусеницы 10, 11, обеспечивая движение машины.
Режимы работы ДВС 1, генератора 3 (гидронасосов) и электромоторов 4, 5 (гидромоторов) устанавливаются главным контроллером 19, связанным с органами управления 24 машиной и панелью приборов.
Скорость движения гусеничной машины устанавливается контроллером 19 в зависимости от положения рукоятки органа управления движением 24. Если мощности ДВС 1 достаточно для поддержания этой скорости при текущем значении тяговой нагрузки машины, то машина движется с заданной скоростью.
При увеличении тяговой нагрузки возрастает необходимый крутящий момент электромоторов 4, 5 (гидромоторов). Если этот момент не может быть реализован при заданной скорости вращения роторов электромоторов (гидромоторов), то контроллеры 21, 22 либо главный контроллер 19 (на машине с гидромеханической трансмиссией) осуществляют снижение скорости вращения роторов электромоторов (гидромоторов) при одновременном повышении крутящего момента.
При уменьшении тягового усилия машины контроллеры 19, 21, 22 автоматически увеличивают скорость вращения роторов электромоторов 4, 5 (гидромоторов) и, соответственно, скорость движения машины до величины, заданной машинистом с помощью органа управления 24 движением машины.
Таким образом, электромеханическая (гидростатическая) трансмиссия обеспечивает автоматическое регулирование тягового усилия в широком диапазоне скорости движения гусеничной машины при полном использовании мощности ДВС 1.
Под проходимостью машины, как известно, понимается ее способность к движению по бездорожью и снегу, к работе на неосушенных и слабоосушенных болотах и на переувлажненных минеральных почвах. Проходимость - это способность машины передвигаться по бездорожью, по грунтам и почвам, имеющим низкую несущую способность, с необходимым тяговым усилием и тяговым КПД, способность преодолевать неровности рельефа без существенного ухудшения плодородия почвы и качества выполняемой работы.
Проходимость гусеничной машины зависит от множества ее конструктивных параметров, важнейшими из которых являются среднее удельное давление гусениц на грунт и клиренс (дорожный просвет). Клиренс - это показанное на чертеже наименьшее расстояние К от точек нижнего контура корпуса (остова) 2 машины (ее днища) до поверхности грунта или почвы без погружения движителя в грунт.
Чем больше клиренс, тем больше, при прочих равных условиях, проходимость машины. С увеличением клиренса движение машины происходит без касания днищем грунта, почвы или снежного покрова, а также пней, валунов, бугров и других неровностей. При погружении гусениц 10, 11 в грунт, почву или снег на глубину, превышающую клиренс, возникают дополнительные силы сопротивления передвижению машины, обусловленные вертикальной деформацией грунта, почвы или снежного покрова лобовой частью остова или корпуса, а также силами трения о днище корпуса 2. Машина нижней поверхностью корпуса 2 ложится на грунт, почву или снег, силы сцепления гусениц 10, 11 уменьшаются и машина останавливается.
В первом варианте реализации гусеничной машины бортовые редукторы 6, 7, с целью повышения клиренса, имеют не менее трех ступеней. Их первые ступени 16, 17 выполнены в виде зубчатых цилиндрических или конических передач с эвольвентным или эксцентриково-циклоидальным зацеплением, или гипоидных передач. Оси малых колес 14, 15 первых ступеней редукторов 6, 7 расположены выше осей последних ступеней бортовых редукторов 8, 9 и ведущих звездочек 12, 13 гусеничной машины.
Следствием применения трехступенчатых бортовых редукторов 6, 7, обеспечивающих их повышенное передаточное отношение, является работа электромоторов 4, 5 или гидромоторов на повышенных угловых скоростях, что обеспечивает уменьшение их габаритных размеров.
Это, в сочетании с перемещением вверх осей электромоторов или гидромоторов, приводит к максимальному подъему нижних поверхностей электромоторов или гидромоторов. Поскольку именно эти поверхности ограничивают возможность подъема днища корпуса 2, это техническое решение обеспечивает увеличение клиренса и, соответственно, повышение проходимости машины.
Другим вариантом реализации гусеничной машины с повышенным клиренсом, обеспечивающим улучшение ее проходимости, является оптимизация соотношения между длиной и наружным диаметром электромоторов или гидромоторов трансмиссии по критерию максимальной проходимости гусеничной машины, либо выбора этого соотношения из условия отсутствия ограничения этой проходимости.
Физический смысл этой оптимизации заключается в следующем.
Известно, что величина крутящего момента электромотора линейно возрастает при увеличении длины его ротора и статора. При увеличении диаметра ротора или статора этот момент возрастает по квадратичной зависимости.
Поэтому уменьшение соотношения диаметр/длина электромотора приводит к подъему нижней плоскости электромотора и, соответственно, к увеличению клиренса. С другой стороны, уменьшение этого соотношения приводит к увеличению массы электромоторов и, соответственно, массы машины в целом. Это, в свою очередь, приводит к увеличению удельного давления гусеничного движителя на грунт, что ухудшает проходимость машины. Соответственно, имеется оптимальное значение соотношения диаметр/длина электромотора, при котором проходимость машины максимальна.
В предложенной гусеничной машине это оптимальное соотношение предварительно определено расчетным или экспериментальным путем. Если по каким-либо причинам, например ввиду ограниченной прочности ротора электромотора, достижение оптимального соотношения невозможно, оно выбирается наиболее близким к оптимальному таким образом, чтобы не ограничивать проходимость машины. Например, не используются электромоторы чрезмерно большого диаметра, существенно ограничивающие клиренс машины.
Сказанное в отношении электромоторов относится и к гидромоторам. Необходимое значение их выходного момента также может быть достигнуто при различных отношениях их длины и диаметра. Например, в аксиально-поршневых гидромоторах могут быть применены короткие поршни большого диаметра, либо длинные поршни уменьшенного диаметра. Могут быть применены также как аксиально-поршневые, так и радиально-поршневые гидромоторы, отличающиеся различными соотношениями их диаметра и длины.
В третьем варианте гусеничной машины указанные два способа повышения проходимости - оптимизация бортовых редукторов и соотношения диаметр/длина электромоторов или гидромоторов, соответствующие альтернативным признакам формулы изобретения, реализованы одновременно.
Четвертый вариант реализации гусеничной машины предполагает оптимизацию расстояния по вертикали между осью ведущей звездочки и нижней поверхностью гидромотора или электромотора. Это расстояние влияет как на величину клиренса, так и на длину опорной поверхности гусеничного движителя. Опускание ведущей звездочки и, соответственно, уменьшение угла наклона задней ведущей ветви гусеницы, с одной стороны, уменьшает клиренс машины и способствует снижению ее проходимости, а с другой стороны, увеличивает длину опорной поверхности гусеничного движителя (базу машины), что способствует повышению проходимости за счет уменьшения удельного давления на грунт (почву, снег), повышения возможности преодоления рвов и т.д. Соответственно, имеется оптимальное значение этого расстояния с точки зрения проходимости. Это значение предварительно определяется расчетным или экспериментальным путем и реализуется в конструкции гусеничной машины.
Данный способ повышения проходимости машины также может быть реализован как отдельно, так и в сочетании с другими указанными выше способами в их любом сочетании.
При увеличении длины опорной поверхности гусеничного движителя ухудшается управляемость машины из-за увеличения сопротивления повороту.
Примером реализации гусеничной машины, в которой обеспечивается компенсация этого эффекта и, соответственно, обеспечивается увеличение радиуса горизонтальной проходимости, является машина, в которой гидромоторы или электромоторы 4, 5 трансмиссии и контроллеры 19 (21, 22) системы электрооборудования обеспечивают реализацию поворота гусеничной машины без разрыва потока мощности с возможностью полного использования мощности ДВС 1 и установления соотношения между выходными моментами гидромоторов или электромоторов в зависимости от заданного радиуса поворота гусеничной машины. В этом случае в режиме поворота машины обеспечивается передача на один бортовой редуктор 6 или 7 более 50% мощности ДВС 1 для обеспечения возможности поворота машины при увеличенной длине гусеничного движителя.
При движении по грунтам с низкой несущей способностью необходимо не допускать интенсивного буксования каждой гусеницы, поскольку в противном случае они интенсивно зарываются в грунт (почву, снег) и машина ложится на грунт днищем корпуса 2.
В варианте реализации гусеничной машины с контролем буксования в состав ее датчиков 23 входят датчик действительной скорости движения гусеничной машины, а также датчики угловой скорости валов бортовых редукторов или соединенных с ними гидромоторов или электрометров 4, 5.
Главный контроллер 19 осуществляет вычисление и сравнение коэффициентов буксования каждой гусеницы с их максимально допустимым значением, предварительно записанным в памяти его микроконтроллера. Далее этот контроллер формирует сигналы управления трансмиссией из условия предотвращения превышения максимально допустимой величины (коэффициента) буксования каждой гусеницы.
Еще в одном варианте реализации гусеничной машины, обладающей повышенной проходимостью, осуществляется контроль глубины погружения гусениц в грунт (почву, снег) и оптимизация управления трансмиссией в зависимости от глубины этого погружения.
В этом случае в состав датчиков 23 входит ультразвуковой, радарный или электромеханический датчик положения остова или корпуса 2 гусеничной машины относительно грунта (датчик высоты Н, показанной на чертеже). Главный контроллер 19 вычисляет глубину погружения гусениц в грунт (h=К-Н) в зависимости от сигналов этого датчика и далее формирует сигналы управления трансмиссией, осуществляя запрет поворота или ограничение минимального радиуса поворота, или ограничение выходного крутящего момента каждого гидромотора или электромотора, или соотношения между этими моментами, в зависимости от глубины этого погружения. Указанные зависимости для каждой машины предварительно определяются расчетным или экспериментальным путем и предварительно записываются в память контроллера 19.
Ограничение выходного крутящего момента каждого гидромотора или электромотора особенно важно в начале движения и при изменении скорости движения машины. В противном случае резкое увеличение крутящего момента и, соответственно, тягового усилия гусениц, приводит к срыву верхнего, более плотного покрова почвы или грунта, что приводит к интенсивному развитию буксования и ухудшению проходимости машины.
Кроме перечисленных параметров, проходимость машины определяется также глубиной преодолеваемого брода. С целью повышения этой глубины устройства системы электрооборудования, включая контроллеры, генератор и электромоторы, расположенные ниже возможной глубины преодолеваемого брода, выполнены с классом защиты от проникновения твердых предметов и воды не хуже, чем IP57 по стандарту МЭК 529 или ГОСТ 14254, а соединяющие их электрические кабели выбраны из условия сохранения регламентированного значения электрического сопротивления изоляции при длительном нахождении в условиях постоянного увлажнения.
В варианте гусеничной машины, в которой реализовано это техническое решение, могут быть дополнительно реализованы иные технические решения, соответствующие другим альтернативным признакам формулы изобретения, в их любом сочетании.
Для специалистов в данной области техники понятно, что кроме описанных вариантов гусеничной самоходной рабочей машины с гидростатической или электромеханической трансмиссией возможны также иные варианты ее реализации на основе признаков, изложенных в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОМЫШЛЕННЫЙ ТРАКТОРНЫЙ АГРЕГАТ С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2014 |
|
RU2550867C1 |
| МОТОРНО-ТРАНСМИССИОННАЯ УСТАНОВКА РАБОЧЕЙ МАШИНЫ | 2014 |
|
RU2558416C1 |
| РОБОТИЗИРОВАННАЯ ПЛАВАЮЩАЯ МАШИНА | 2018 |
|
RU2714551C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2017 |
|
RU2643903C1 |
| САМОХОДНАЯ РАБОЧАЯ МАШИНА С УСТРОЙСТВАМИ ДЛЯ ЕЕ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ | 2014 |
|
RU2569711C2 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
| ГУСЕНИЧНЫЙ ТРАКТОР С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ (ВАРИАНТЫ) | 2019 |
|
RU2720694C1 |
| Самоходная машина (варианты) | 2023 |
|
RU2841418C1 |
Изобретение относится к гусеничным самоходным рабочим машинам с гидростатической или электромеханической трансмиссией, в частности к тракторам и бульдозерам на их базе. Машина содержит двигатель внутреннего сгорания (ДВС), гидронасос или генератор трансмиссии, два гидромотора или электромотора трансмиссии и трехступенчатые бортовые редуктора, первые ступени которых выполнены цилиндрическими, а последние планетарными, размещенными внутри гусеничного обвода, а также контроллеры системы электрооборудования. В различных вариантах исполнения машины дополнительно могут быть реализованы: оптимизация соотношения между длиной и диаметром электромоторов или гидромоторов трансмиссии, с учетом влияния этого соотношения на клиренс и удельное давление гусеничного движителя на грунт, оптимизация расстояния между осью ведущей звездочки и нижней поверхностью гидромоторов или электромоторов, реализация поворотов с полным использованием мощности ДВС и необходимым соотношение между выходными моментами гидромоторов или электромоторов, контроль и ограничение буксования каждой гусеницы и величины их погружения в грунт, ограничение величины или скорости нарастания крутящего момента гидромоторов или электромоторов в начале движения гусеничной машины или при увеличении ее скорости, а также герметизация устройств системы электрооборудования. Изобретение обеспечивает повышение проходимости гусеничной машины. 4 з.п. ф-лы, 1 ил.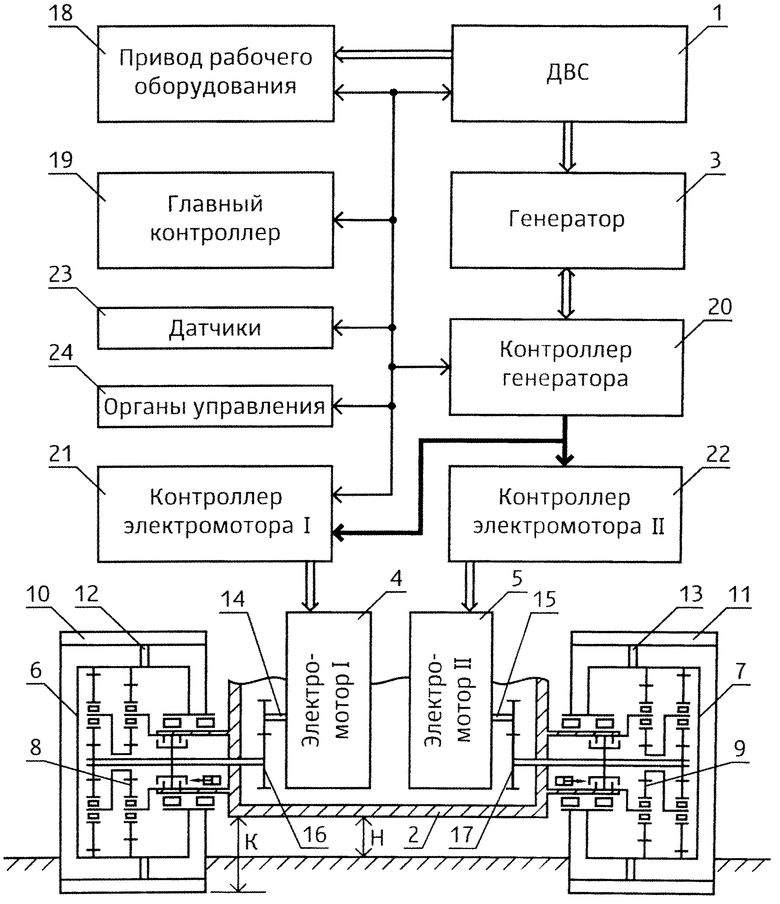
1. Гусеничная машина с гидростатической или электромеханической трансмиссией, содержащая двигатель внутреннего сгорания, установленный на остове или корпусе гусеничной машины, по меньшей мере, один гидронасос или генератор трансмиссии, соединенный с двигателем внутреннего сгорания непосредственно, или через муфту, или через согласующий редуктор и муфту, и приспособленный для преобразования, по меньшей мере, части механической энергии двигателя внутреннего сгорания в гидравлическую или электрическую энергию, два гидромотора или электромотора трансмиссии, приспособленные для преобразования этой гидравлической или электрической энергии в механическую энергию, два бортовых редуктора, последние ступени которых выполнены планетарными, размещены внутри гусеничного обвода и соединены с его ведущими звездочками, а входные валы бортовых редукторов непосредственно или через передаточные устройства механически соединены с гидромоторами или электромоторами трансмиссии, а также систему электрооборудования, приспособленную для управления двигателем внутреннего сгорания, и/или гидромоторами или электромоторами трансмиссии, и/или, по меньшей мере, одним гидронасосом или генератором трансмиссии, отличающаяся тем, что в ней дополнительно реализовано, по меньшей мере, одно из следующих технических решений:
а) бортовые редукторы имеют не менее трех ступеней, причем их первые ступени выполнены в виде зубчатых цилиндрических или конических передач с эвольвентным или эксцентриково-циклоидальным зацеплением, или гипоидных передач, причем оси их малых колес расположены выше осей последних ступеней бортовых редукторов и ведущих звездочек;
б) соотношение между длиной и наружным диаметром электромоторов или гидромоторов трансмиссии выбрано из условия достижения максимальной проходимости гусеничной машины или отсутствия ограничения этой проходимости;
в) расстояние по вертикали между осью ведущей звездочки и нижней поверхностью гидромотора или электромотора выбрано из условия обеспечения заданного клиренса гусеничной машины, а также опускания ведущей звездочки с гусеницей на грунт или установления угла наклона задней ведущей ветви гусеницы не более 6°;
г) гидромоторы или электромоторы трансмиссии и система электрооборудования приспособлены для реализации поворота гусеничной машины с возможностью полного использования мощности двигателя внутреннего сгорания и установления соотношения между выходными моментами гидромоторов или электромоторов в зависимости от заданного радиуса поворота гусеничной машины;
д) система электрооборудования выполнена с возможностью определения величины буксования каждой гусеницы и последующего формирования сигналов управления гидромоторами или электромоторами трансмиссии и/или, по меньшей мере, одним гидронасосом или генератором трансмиссии, из условия ограничения этого буксования;
е) система электрооборудования выполнена с возможностью определения величины погружения гусениц в грунт и последующего формирования сигналов управления гидромоторами или электромоторами трансмиссии и/или, по меньшей мере, одним гидронасосом или генератором трансмиссии, в зависимости от величины этого погружения из условия предотвращения ее увеличения;
ж) система электрооборудования выполнена с возможностью формирования сигналов управления гидромоторами или электромоторами трансмиссии и/или, по меньшей мере, одним гидронасосом или генератором трансмиссии, из условия ограничения величины и/или скорости нарастания крутящего момента гидромоторов или электромоторов в начале движения гусеничной машины и/или при увеличении ее скорости;
з) устройства системы электрооборудования, генератор и электромоторы, расположенные ниже возможной глубины преодолеваемого брода, выполнены водонепроницаемыми, а соединяющие их электрические кабели выполнены с возможностью сохранения регламентированного значения электрического сопротивления изоляции при длительном нахождении в условиях постоянного увлажнения.
2. Гусеничная машина по п.1, отличающаяся тем, что соотношение между длиной и наружным диаметром электромоторов или гидромоторов трансмиссии выбрано из условия достижения максимальной проходимости гусеничной машины или отсутствия ограничения этой проходимости с учетом влияния этого соотношения на клиренс, а также на массу и удельное давление гусеничного движителя на грунт.
3. Гусеничная машина по п.1, отличающаяся тем, что система электрооборудования содержит микропроцессорный контроллер, датчик действительной скорости движения гусеничной машины, а также датчики угловой скорости валов бортовых редукторов или соединенных с ними гидромоторов или электрометров, причем микропроцессорный контроллер выполнен с возможностью вычисления и сравнения коэффициента буксования каждой гусеницы с максимально допустимым значением этого коэффициента, предварительно записанным в памяти его микроконтроллера, а также последующего формирования указанных сигналов управления в зависимости от результатов этого сравнения из условия предотвращения превышения максимально допустимой величины коэффициента буксования каждой гусеницы.
4. Гусеничная машина по п.1, отличающаяся тем, что система электрооборудования содержит микропроцессорный контроллер и ультразвуковой, или радарный, или электромеханический датчик положения остова или корпуса гусеничной машины относительно грунта, причем микропроцессорный контроллер приспособлен для вычисления глубины погружения гусениц в грунт в зависимости от сигналов этого датчика, а система электрооборудования приспособлена для формирования указанных сигналов управления с возможностью запрета поворота или ограничения минимального радиуса поворота гусеничной машины, или ограничения выходного крутящего момента каждого гидромотора или электромотора, или соотношения между этими моментами, в зависимости от глубины этого погружения.
5. Гусеничная машина по п.1, отличающаяся тем, что корпуса устройств системы электрооборудования, генератора и электромоторов, расположенных ниже возможной глубины преодолеваемого брода, имеют класс защиты от проникновения твердых предметов и воды не хуже, чем IP57 по стандарту МЭК 529 или ГОСТ 14254.
| Совмещенное устройство проточного воздухосборника и вантуза | 1958 |
|
SU125662A1 |
| Сухой способ производства солонины | 1947 |
|
SU74322A1 |
| ЭЛЕКТРИЧЕСКАЯ СИЛОВАЯ ПЕРЕДАЧА ДЛЯ РАБОЧЕЙ МАШИНЫ | 2006 |
|
RU2394701C2 |
| ГИДРООБЪЕМНАЯ ТРАНСМИССИЯ ГУСЕНИЧНОГО ТРАКТОРА | 2003 |
|
RU2247037C1 |
| US 5343971 A, 06.09.1994 | |||

