Изобретение относится к машиностроению, в частности к соединениям деталей машин.
Известно [1, с. 20, 3-й и 4-й образцы сверху] что любая механическая система (механизм, машина) состоит из звеньев и соединений звеньев, а соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой.
Различают кинематические пары низшие и высшие [1,с.27, пункт 7o] Если соприкосновение звеньев происходит по поверхности, то пара называется низшей, а если по линии или в точке, то высшей.
В той же книге введено понятие числа контактов звеньев между собой [1, на с. 20, начиная со строки 18 снизу] где записано "совокупность поверхностей, линий и отдельных точек звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару, называется элементом кинематической пары. Именно "совокупность" есть то самое число, которое определяет контактность. Каждые поверхность, линия и точка этой совокупности есть контакт.
Известна двухподвижная кинематическая пара, называемая "сферической с пальцем" [1, табл. 1, с. 31, 6-ая пара сверху и рис. 2.25.е, на с. 47] Эта пара не может быть отнесена ни к низшей, ни к высшей, т.к. сферическое соединение звеньев есть соединение по поверхности, а соприкосновение пальца с прорезью есть точечное или линейное, т.е. с этой позиции пара высшая.
Сферическая с пальцем пара обеспечивает соприкосновение звеньев по сферической поверхности (один контакт) и пальца одного звена с прорезью в другом звене (второй контакт). Таким образом сферическая с пальцем пара есть пара двухконтактная. Возможно и большее число контактов между звеньями. Однако введение звеньев в дополнительный контакт в случае пары сферической с пальцем не обеспечивает определенности относительно движения, т.к. остались два независимых движения вокруг двух взаимно перпендикулярных осей декартовой системы координат.
Известна цилиндрическая кинематическая пара, принимаемая за прототип [1, с. 25. рис. 1.7 и строки с 22 по 14, снизу, и табл. 1 на с. 31] которая состоит из двух цилиндров. Такая пара есть низшая пара и двухподвижная, она позволяет звеньям совершать относительные движения вдоль их геометрической оси и вокруг этой оси. Цилиндрическая пара обеспечивает соприкосновение деталей по единой цилиндрической поверхности, т.е. такая пара есть одноконтактная.
Недостатком такой пары является неопределенность относительного движения, а именно полная независимость двух относительных движений. Чтобы добиться зависимости этих движений друг относительно друга, т.е. сделать эту пару одноподвижной, необходимо введение в нее существенных конструктивных изменений.
Задачей изобретения является устранение независимости двух движений, т. е. обеспечение одноподвижности.
В изобретении поставленная задача достигается за счет того, что звенья, соединенные в одноконтактную цилиндрическую кинематическую пару, снабжены пальцами, обеспечивающими точечный дополнительный контакт, который устраняет независимость двух движений.
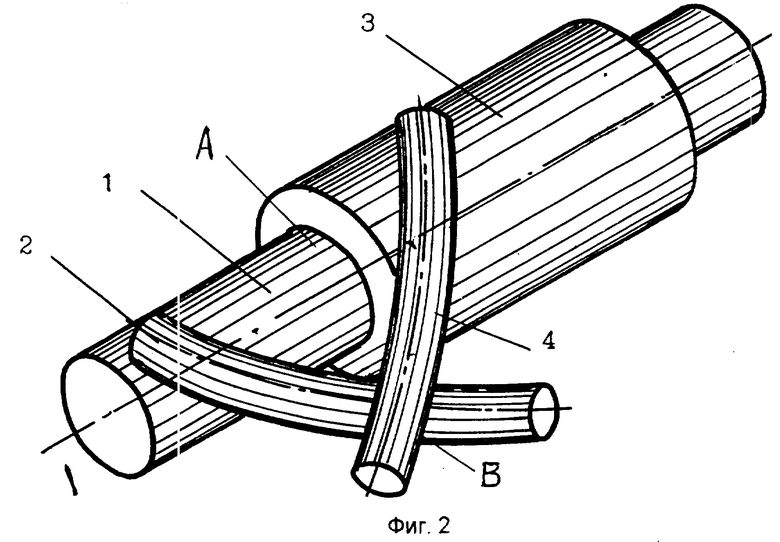
Предлагаемая двухконтактная кинематическая пара изображена на фиг.1 с цилиндрическими пальцами и на фиг.2 с пальцами, оси которых выполнены криволинейными.
На фиг.1 показаны валик 1 с пальцем 2 и втулка 3 с пальцем 4, взаимодействующие между собой по цилиндрическому контакту А и точечному контакту B. Углы перекрещивания α и β осей пальцев 2 и 4 с осью Х-Х соединения могут приниматься различными, что позволяет обеспечить три вида относительного движения звеньев вращательное, что при α = 90° и β = 90°, поступательное при α = 90° и β = 0° и винтовое при любых углах α и β.
Двухконтактная кинематическая пара работает следующим образом. Если звену 1 задать движение относительно звена 3, принятого за неподвижное, то в результате того, что звенья имеют два контакта, звено 1 одновременно будет, взаимодействуя со звеном 3, совершать движение вдоль и вокруг геометрической оси Х-Х и это смешение будет зависимым, обусловленным величинами углов a и β, т.е. такая пара окажется одноподвижной.
На фиг. 2 оси пальцев выполнены криволинейными. Тогда винтовое движение одного звена относительно другого окажется с переменным шагом, обусловленным кривизной осей пальцев.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХЗВЕННОЕ ЗАКЛИНИВАЮЩЕЕ СОЕДИНЕНИЕ | 1996 |
|
RU2108492C1 |
| РАЗЪЕМНОЕ ЗАКЛИНИВАЮЩЕЕ СОЕДИНЕНИЕ | 1996 |
|
RU2099610C1 |
| БУРОВОЙ АГРЕГАТ ДЛЯ СТРОЧНОГО БУРЕНИЯ ШПУРОВ | 1997 |
|
RU2130545C1 |
| РЫЧАЖНЫЙ ПРЕОБРАЗОВАТЕЛЬ УСИЛИЙ | 1997 |
|
RU2123428C1 |
| ТВЕРДОСПЛАВНАЯ ВСТАВКА ДВОРНИКОВА-ВЕЧУЖАНИНА ДЛЯ БУРОВЫХ КОРОНОК | 1995 |
|
RU2090735C1 |
| РЕДУКТОР ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 1994 |
|
RU2082047C1 |
| БУРОВОЙ МАНИПУЛЯТОР | 1994 |
|
RU2083820C1 |
| РАЗЪЕМНОЕ ЭКСЦЕНТРИКОВОЕ СОЕДИНЕНИЕ | 1994 |
|
RU2108493C1 |
| БУРОВАЯ КОРОНКА | 1994 |
|
RU2083793C1 |
| ЦАНГОВОЕ СОЕДИНЕНИЕ ДЕТАЛЕЙ МАШИН | 1992 |
|
RU2069277C1 |
Использование: машиностроение, соединение деталей машин. Сущность изобретения: кинематическая пара, содержащая звенья в виде валика и втулки, которые соединен с возможностью вращения и осевого перемещения, снабжена пальцами, жестко соединенными с валиком с втулкой и предназначенными для взаимодействия друг с другом с образованием дополнительного контакта между звеньями кинематической пары. 1 з.п. ф-лы, 2 ил.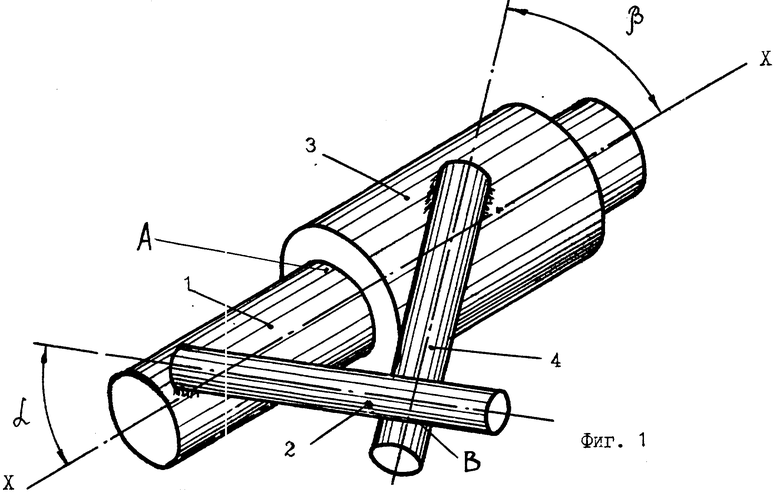
| Артоболевский И.И | |||
| Теория механизмов и машин, учебник для ВУЗов, 4-е изд | |||
| - М.: Наука, 1988, с.25, рис | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
