Изобретение относится к области измерительной технике и может быть использовано, например, в измерительном устройстве.
Известно контрольно-измерительное устройство фирмы Ренк Тейлор Хобсон (В), на которое в СССР выдан патент N 1718735, взятое за прототип, механизм перемещения которого содержит основание, размещенную на нем с возможностью вращения вокруг своей оси опору для детали, привод для вращения опоры, установленную на основании колонну, размещенную на колонне с возможностью продольного перемещения каретку, установленную на каретке с возможностью продольного перемещения штангу, несущую датчик, приводы для перемещения соответственно каретки и штанги.
Однако необходимость манипулирования несколькими автономными приводами для перемещения датчика при подготовке к работе и при переходе на соседнюю траекторию при измерении усложняет работу оператора при обмере поверхностей сложной конфигурации, когда необходимо получить информацию о координатах как можно большего числа точек поверхности измеряемой детали, увеличивает время, необходимое для измерения.
Техническим результатом изобретения является получение более полной информации об измеряемой поверхности сложной конфигурации, сокращение времени, необходимого для измерения, уменьшение габаритов и массы устройства, а также надежность работы и повышение точности измерений.
Указанный технический результат достигается тем, что в известный механизм перемещения измерительного устройства, содержащий основание, размещенный на нем привод вращения опоры для измеряемой детали, установленную на основании колонну, размещенную на колонне с возможностью продольного перемещения каретку и установленную на каретке штангу, несущую датчик, введены размещенная на установленном в корпусе привода дополнительном валу предохранительная муфта, кинематически связанная с выходным валом привода вращения опоры, барабан, установленный с радиальным и осевым зазорами на корпусе муфты, и по крайней мере один ведущий палец, жестко укрепленный также на корпусе муфты, при этом ведущий палец расположен в барабане с зазором, а на барабане выполнена наружная винтовая канавка, в которой смонтирован канат, концы которого закреплены на размещенной на колонне каретке, а средняя точка контактируемой с винтовой канавкой части каната механически зафиксирована на барабане.
Изобретение является новым, т.к. оно не известно из уровня техники.
Хотя валы, предохранительные муфты, барабаны с наружными винтовыми канавками, ведущие пальцы и канаты широко известны, однако кинематическая связь размещенной на дополнительном валу предохранительной муфты, обеспечивающей предохранение электродвигателя от перегрузок, жестко укрепленного ведущего пальца и снабженного наружной винтовой канавкой барабана с канатом, концы которого закреплены на каретке, несущей штангу с датчиком, а средняя точка контактируемой с винтовой канавкой части каната механически зафиксирована на барабане, позволяет осуществлять перемещение каретки, несущей штангу с датчиком, одновременно с вращением опоры для измеряемой детали, а размещение барабана на корпусе муфты с радиальным и осевым зазорами и расположение в барабане с зазором ведущего пальца позволяет в конце хода каретки "вниз" или "вверх" в момент реверса привода вращения опоры осуществлять поворот опоры с измеряемой деталью на половину оборота (180o) без перемещения датчика. В результате происходит смещение винтовой линии поверхности, координаты точек которой измеряются датчиком, по вертикали на величину, равную половине перемещения датчика за один оборот опоры. Такое смещение позволяет в свою очередь уменьшить расстояние между двумя соседними точками по вертикали и получить более полную информацию об измеряемой поверхности, а наличие предохранительной муфты позволяет увеличить ресурс работы механизма.
Переход датчика к измерению геометрических координат соседней точки поверхности происходит автоматически, поэтому отпадает необходимость манипулирования несколькими автономными приводами, что сокращает время, необходимое для получения более полной информации о геометрических координатах точек поверхности сложной конфигурации.
Механическое фиксирование на барабане средней точки контактируемой с винтовой канавкой части каната позволяет минимизировать длину каната и обусловлено тем, что ход каретки из крайнего верхнего положения в крайнее нижнее положение равен обратному ходу каретки из крайнего нижнего положения в крайнее верхнее положение и, следовательно, длина каната от точки фиксации, наматываемая на барабан при повороте против часовой стрелки (движение каретки вниз), равна длине от точки фиксации, наматываемой на барабан при повороте по часовой стрелке (движение каретки вверх), что позволяет устранить проскальзывание каната при повороте барабана и тем самым повысить точность устройства.
Это позволяет сделать вывод о соответствии технического решения критерию "изобретательский уровень".
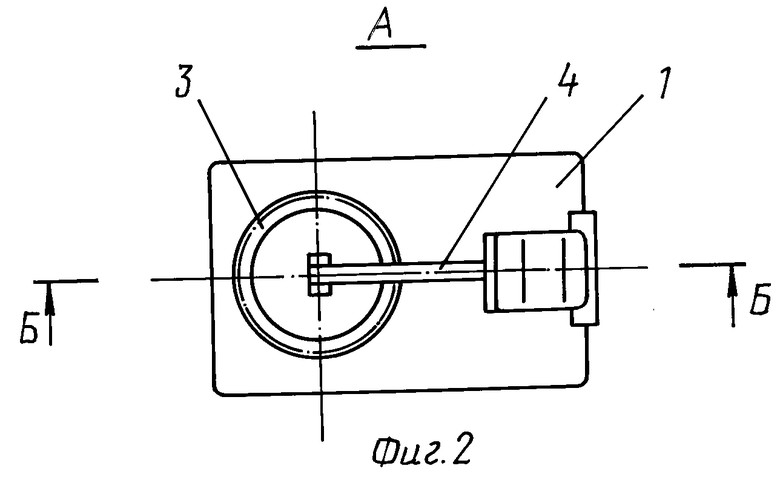
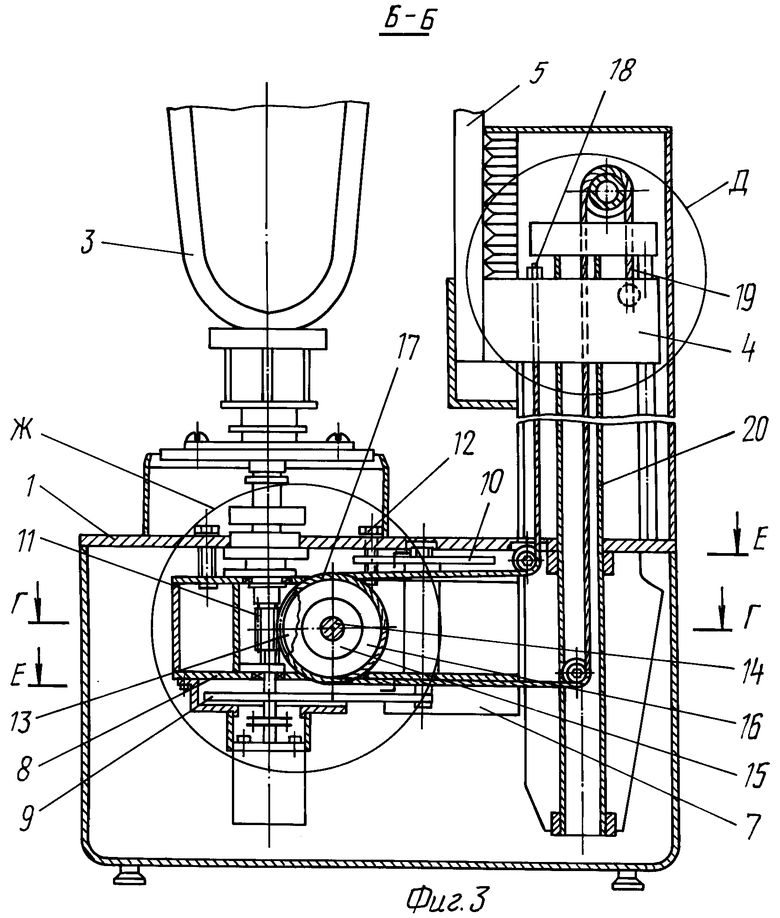
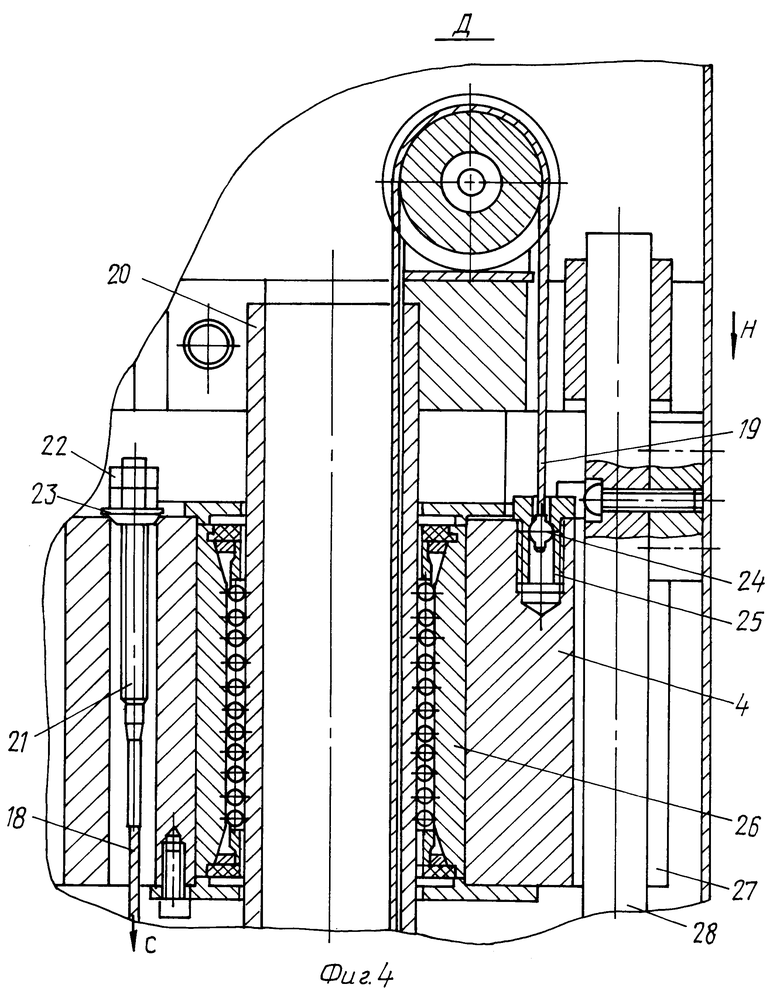
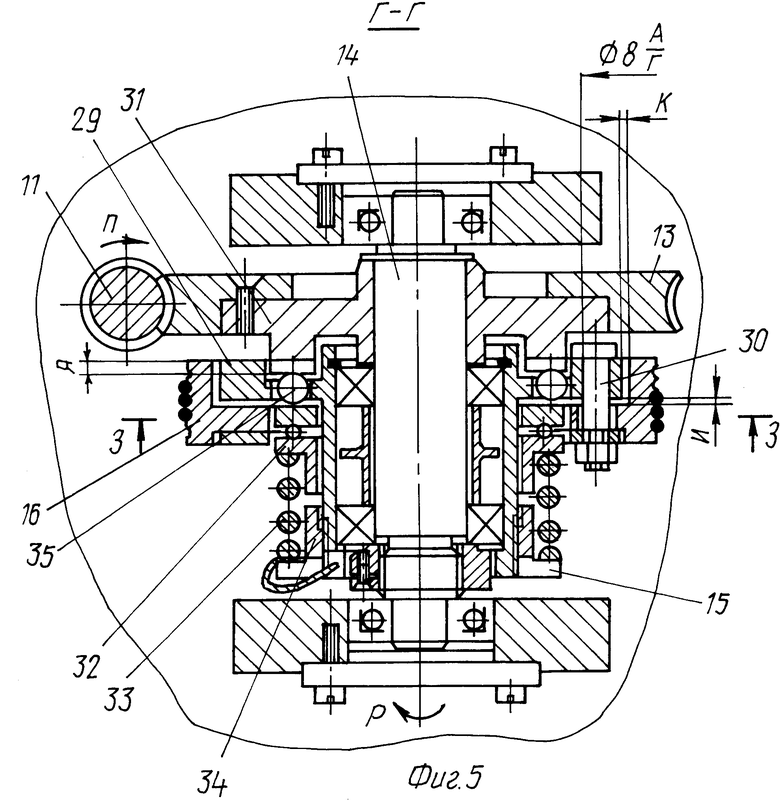
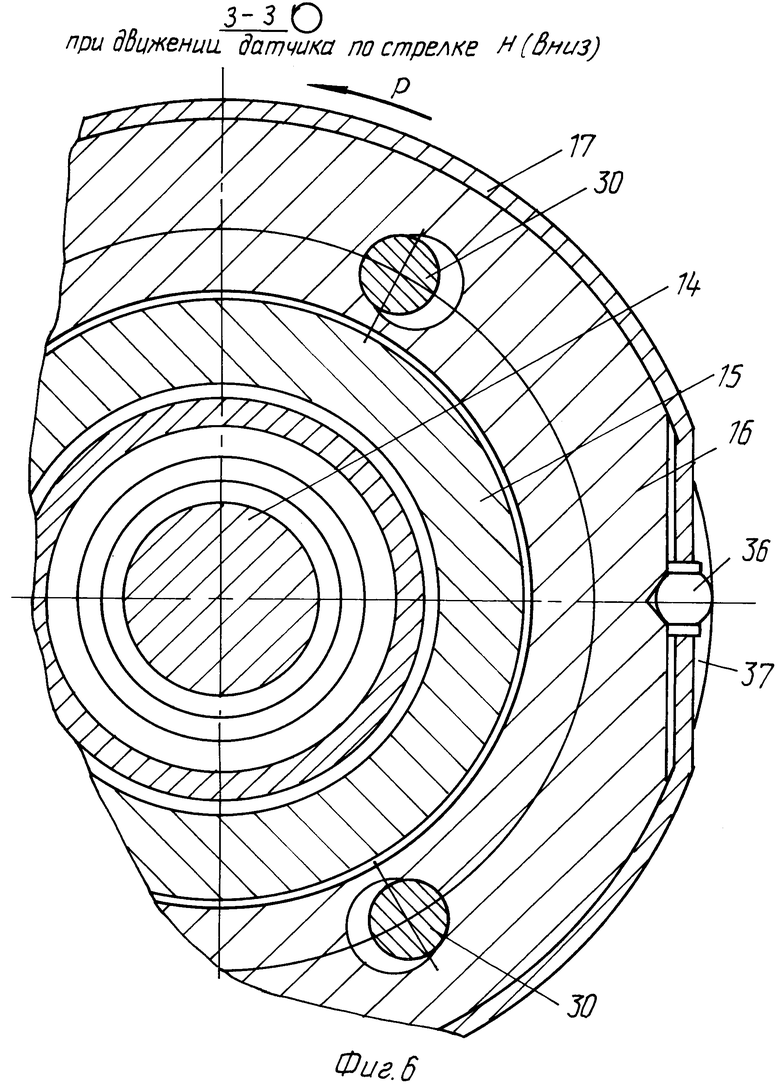
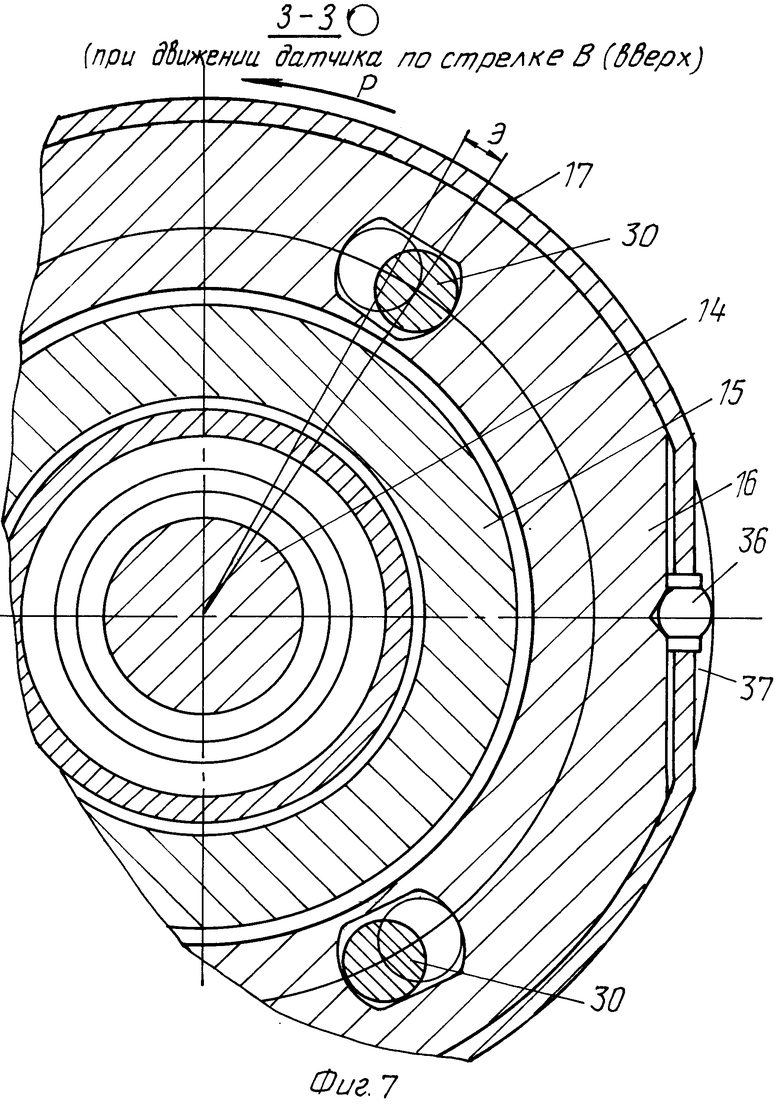
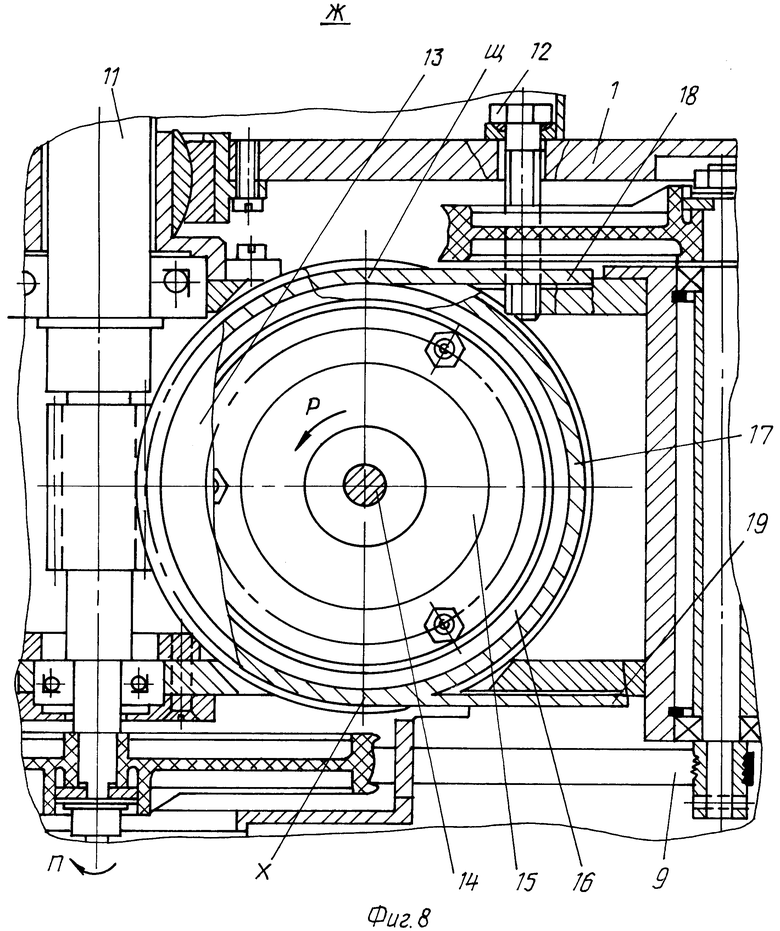
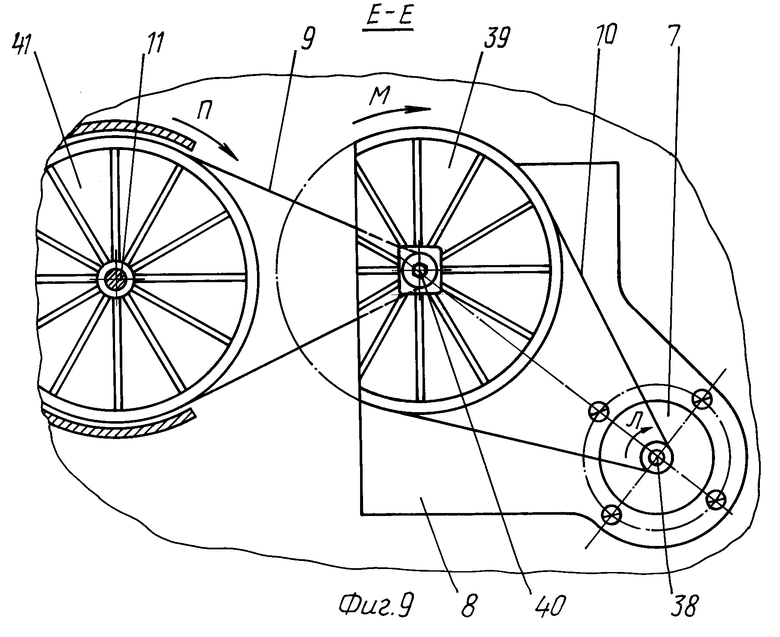
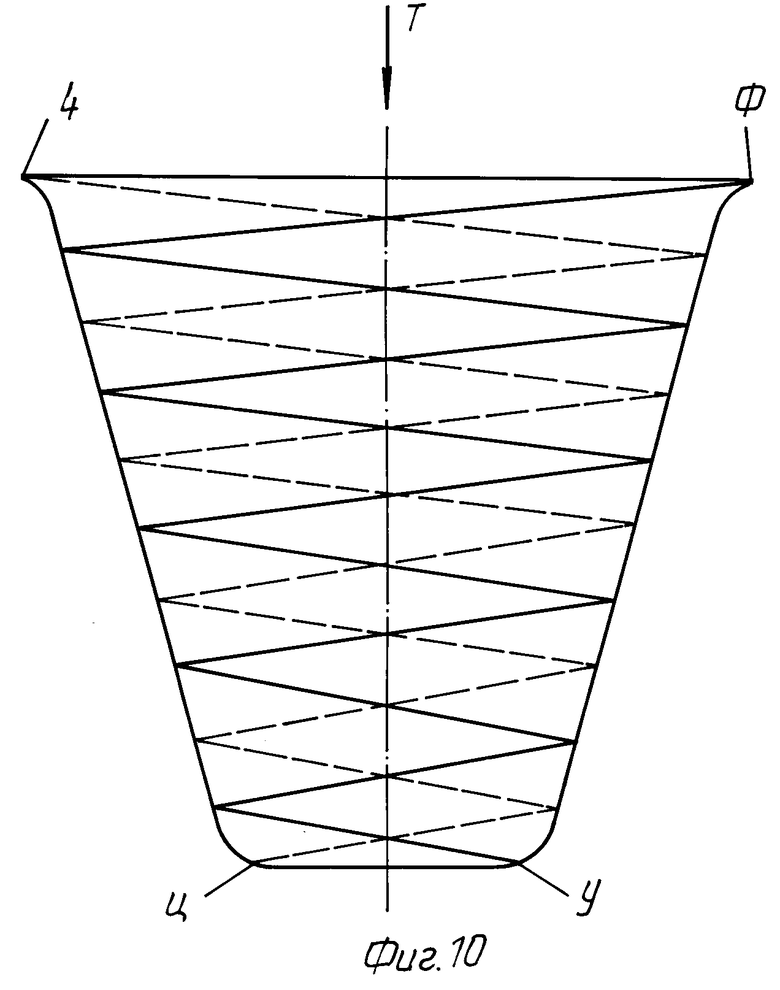
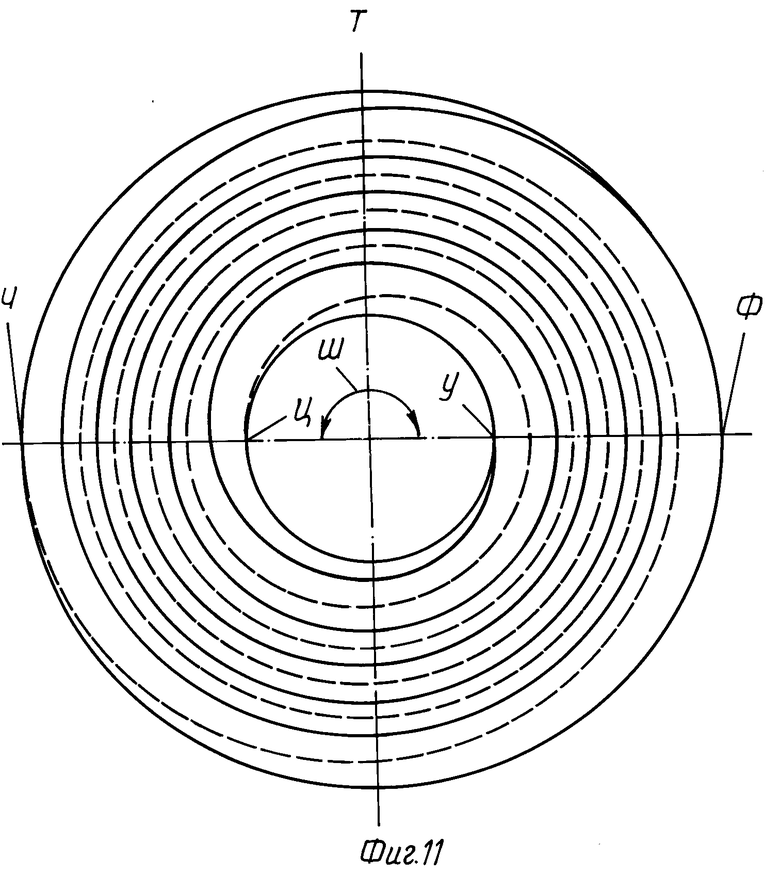
На фиг. 1 11 представлен пример реализации предлагаемого механизма перемещения измерительного устройства. На фиг. 1 и 2 показан общий вид механизма перемещения; на фиг. 3 механизм перемещения представлен в разрезе; на фиг. 4 укрупненно показана размещенная на колонне каретка с закрепленными на ней концами каната; на фиг. 5 -размещенная на установленном в корпусе привода дополнительном валу предохранительная муфта и барабан; на фиг. 6 и 7 - в разрезе барабан с ведущими пальцами; на фиг. 8 укрупненно кинематическая связь выходного вала привода вращения опоры с предохранительной муфтой; на фиг. 9 в плане привод вращения опоры для измеряемой детали; на фиг. 10 и 11 схематически винтовые линии поверхности, координаты точек которых измеряются датчиком.
Механизм перемещения измерительного устройства содержит основание 1, опору 2 для измеряемой детали 3 и укрепленную на каретке 4 штангу 5, несущую датчик 6.
Привод вращения опоры для измеряемой детали, состоящий из электродвигателя 7, корпуса 8 и двух ременных передач 9 и 10, передающих вращение на выходной вал 11, размещен на основании с помощью болтов 12 (фиг. 3). Выходной вал через червячное колесо 13 кинематически связан с размещенной на установленном в корпусе привода дополнительном валу 14 предохранительной муфтой 15, на корпусе которой установлен барабан 16, снабженный наружной винтовой канавкой, в которой смонтирован канат 17, ветви 18 и 19 которого закреплены на каретке, размещенной на колонне 20, установленной на основании.
Один конец каната (фиг. 4) закреплен на каретке с помощью обжатого на канате наконечника 21, снабженного наружной резьбой, и гаек 22 со сферической шайбой 23. Другой конец каната закреплен на каретке с помощью обжатого на канате шарика 24 и втулки 25, снабженной наружной резьбой. Каретка размещена на колонне с помощью подшипника 26. В пазу 27 каретки установлен направляющий валик 28, закрепленный на основании.
На корпусе 29 предохранительной муфты 15 (фиг. 5) параллельно ее оси жестко укреплен ведущий палец 30, расположенный в барабане с зазором. Барабан на корпусе муфты установлен с радиальным зазором К и осевым зазором И.
Предохранительная муфта 15 состоит из полумуфты 31 и подвижной полумуфты, содержащей упорный подшипник 32, пружину 33 и гайку 34, размещенных на валу 14. В торцевых пазах Я полумуфты 31 размещены шарики 35.
Средняя точка контактируемой части каната с винтовой канавкой (фиг. 6) механически зафиксирована на барабане с помощью обжатого на канате шарика 36, уложенного в паз 37, выполненный на барабане.
Контактируемая часть каната с винтовой канавкой (фиг. 8) начинается в точке Щ соприкосновения ветви 18 с барабаном и заканчивается в точке Х ветви 19 каната.
В приводе вращения опоры (фиг. 9) выходной вал 38 электродвигателя связан ременной передачей со шкивом 39, вращающим промежуточный вал 40, связанный ременной передачей со шкивом 41.
Работа механизма перемещения измерительного устройства при обмере детали 3, укрепленной на опоре 2, происходит следующим образом.
Перед началом работы каретка 4 со штангой 5 и датчиком 6 находится в верхнем положении (фиг. 1). При подаче управляющего сигнала на электродвигатель 7 выходной вал 38 электродвигателя вращается по стрелке Л (фиг. 9). Через ременную передачу 10 вращение передается на шкив 39 и вал 40, которые вращаются по стрелке М, и далее через ременную передачу 9 на шкив 41 и выходной вал 11, которые вращаются по стрелке П. Вместе с выходным валом вращается опора 2 с укрепленной на ней измеряемой деталью 3. Одновременно червяк выходного вала 11 поворачивает червячное колесо 13 по стрелке Р (фиг. 8). При этом (фиг. 5) поворачивается связанный с червячным колесом корпус 29 предохранительной муфты 15, а жестко установленные в корпусе 29 ведущие пальцы 30, занимая положение, показанное на фиг. 6, поворачивают барабан 16 по стрелке Р. При этом ветвь 18 каната 17 (фиг. 8) наматывается на барабан, а ветвь 19 сматывается с барабана. Каретка 4 (фиг. 4) под действием силы С, возникающей в ветви 18, движется на подшипнике 26 по колонне 20 вниз, по стрелке Н. При этом направляющий валик 28, установленный в пазу 27 каретки, удерживает ее от проворота.
Вместе с кареткой движется по стрелке Н (фиг. 1) штанга 5, несущая датчик 6. Когда каретка с датчиком достигает нижнего положения, срабатывает концевой выключатель, электродвигатель выключается.
В предохранительной муфте (фиг. 5) вращающий момент с полумуфты 31 на подвижную полумуфту передается шариками 35, поджимаемыми в торцевые пазы Я полумуфты 31 пружиной 33 через упорный подшипник 32 с определенной силой, регулируемой гайкой 34, при этом окружная сила воздействия на шарики 35 находится в равновесии с силой сжатия пружины 33, т.е. выполняется условие равновесия подвижной полумуфты.
Учитывая, что перемещение каретки с датчиком происходит одновременно с поворотом детали, точки поверхности, геометрические координаты которых измерены на ходе каретки по стрелке Н, располагаются на винтовой линии, показанной на фиг. 10, 11 сплошной линией, начинающейся в точке Ф и заканчивающейся в точке У. После выключения электродвигателя по управляющему сигналу происходит его новое включение, но с вращением выходного вала электродвигателя в обратную сторону против стрелки Л (фиг. 9). Соответственно выходной вал 11 вращается против стрелки П, а червячное колесо 13 и корпус 29 предохранительной муфты 15 с ведущими пальцами 30 вращаются против стрелки Р. При этом, т. к. ведущие пальцы 30 установлены в барабане 16 с зазором, поворот барабана 16 против стрелки Р начнется только после того, как ведущие пальцы 30 займут положение, показанное на фиг. 7.
За это время червячное колесо повернется относительно барабана на угол Э.
С учетом передаточного отношения i в червячной паре поворот опоры 2 с измеряемой деталью 3 при неподвижной каретке 4 составит угол Ш i•Э. В представляемой конструкции Ш 180o.
С началом поворота барабана 16 против стрелки Р начнется наматывание на барабан ветви 19 каната 17 и движение вверх, по стрелке В, каретки 4 с датчиком 6 (фиг. 4).
Дальнейшее вращение измеряемой детали и перемещение каретки с датчиком происходят синхронно, и точки поверхности, геометрические координаты которых измерены на ходе каретки по стрелке В, располагаются на винтовой линии, показанной на фиг. 10, 11 пунктирной линией, начинающейся в точке Ц и заканчивающейся в точке Ч.
Эта линия смещена по вертикали от линии Ф У на величину, равную половине перемещения датчика за один оборот.
В момент, когда каретка 4 с датчиком 6 достигает "верхнего положения", срабатывает концевой выключатель, электродвигатель 7 отключается. Обмер детали заканчивается.
При работе механизма перемещения на ветвях 18 и 19 каната могут возникать перегрузки, которые можно предотвратить благодаря срабатыванию муфты 15.
Срабатывание происходит следующим образом. Наступает остановка барабана 16, который через пальцы 30 жестко связан с корпусом 29 муфты, выходной вал 11, продолжая вращаться, вращает червячное колесо 13, жестко связанное с полумуфтой 31, при этом окружная сила, действующая на шарики 35 в пазах Я, выходит из равновесия с силой сжатия пружины 33 условие равновесия подвижной полумуфты нарушается. Полумуфта 31 преодолевает сопротивление пружины 3 посредством проворота шариков 35, при этом шарики 35 выходят из пазов Я - муфта 15 срабатывает, что сопровождается характерным звуком, ограничивая момент на валу электродвигателя.
Из вышеизложенного видно, что измерение осуществляется и на ходе каретки из "верхнего положения" в "нижнее положение", и на обратном ходе, т.е. холостой ход отсутствует. Один привод осуществляет и перемещение датчика, и вращение измеряемой детали, поэтому не требуется при измерении манипулирование несколькими приводами.
Все это облегчает работу оператора, сокращает время, необходимое для измерения. Отсутствие дополнительных приводов уменьшает габариты и массу устройства по сравнению с существующими аналогами.
Смещение по вертикали винтовой линии поверхности, координаты точек которой измеряются датчиком, позволяет уменьшить расстояние между двумя соседними точками по вертикали и получить более полную информацию об измеряемой поверхности.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ ИЗМЕРИТЕЛЬНОГО УСТРОЙСТВА | 1993 |
|
RU2062974C1 |
| КРУПНОГАБАРИТНЫЙ КОСМИЧЕСКИЙ СКЛАДНОЙ РЕФЛЕКТОР | 1996 |
|
RU2101811C1 |
| СПАЛЬНОЕ МЕСТО КОСМОНАВТА | 1993 |
|
RU2089470C1 |
| ВОЛНОВАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 1998 |
|
RU2131544C1 |
| ВОЛНОВОЙ ПРИВОД | 1995 |
|
RU2080500C1 |
| СПОСОБ ПОДВОДНОЙ РАЗРАБОТКИ МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1995 |
|
RU2098628C1 |
| ГЕРМЕТИЧНЫЙ ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 1996 |
|
RU2118713C1 |
| ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 1996 |
|
RU2103556C1 |
| ПРИВОД | 1995 |
|
RU2094677C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СМЕЩЕНИЯ И УГЛА РАССОГЛАСОВАНИЯ МЕЖДУ ОСЬЮ ВРАЩЕНИЯ ПЛАТФОРМЫ И ОСЬЮ ПЕРЕМЕЩЕНИЯ ИЗМЕРИТЕЛЬНОЙ ГОЛОВКИ | 1993 |
|
RU2091703C1 |
Использование: в измерительной технике, в измерительных машинах и контрольно-измерительных устройствах. Механизм содержит основание, привод вращения опоры для измеряемой детали и колонну, размещенные на основании. На колонне установлена каретка с возможностью продольного перемещения, а на каретке размещен датчик. Кроме того, устройство содержит предохранительную муфту, кинематически связанную с выходным валом привода вращения опоры, барабан, установленный на корпусе муфты с радиальным и осевым зазорами, ведущих пальцев, размещенных на корпусе муфты. На барабане выполнена наружная винтовая канавка, в которой смонтирован канат. Концы каната закреплены на каретке, а средняя точка каната механически зафиксирована на барабане. При подаче сигнала на выходной вал он начинает вращаться и передает вращение опоре с измеряемой деталью. Обмер детали осуществляется датчиком, установленным на штанге, закрепленной на каретке, которая связана канатом через барабан с муфтой привода вращения опоры и может перемещаться вдоль направляющей колонны, установленной на основании из крайнего верхнего положения в крайнее нижнее. 11 ил.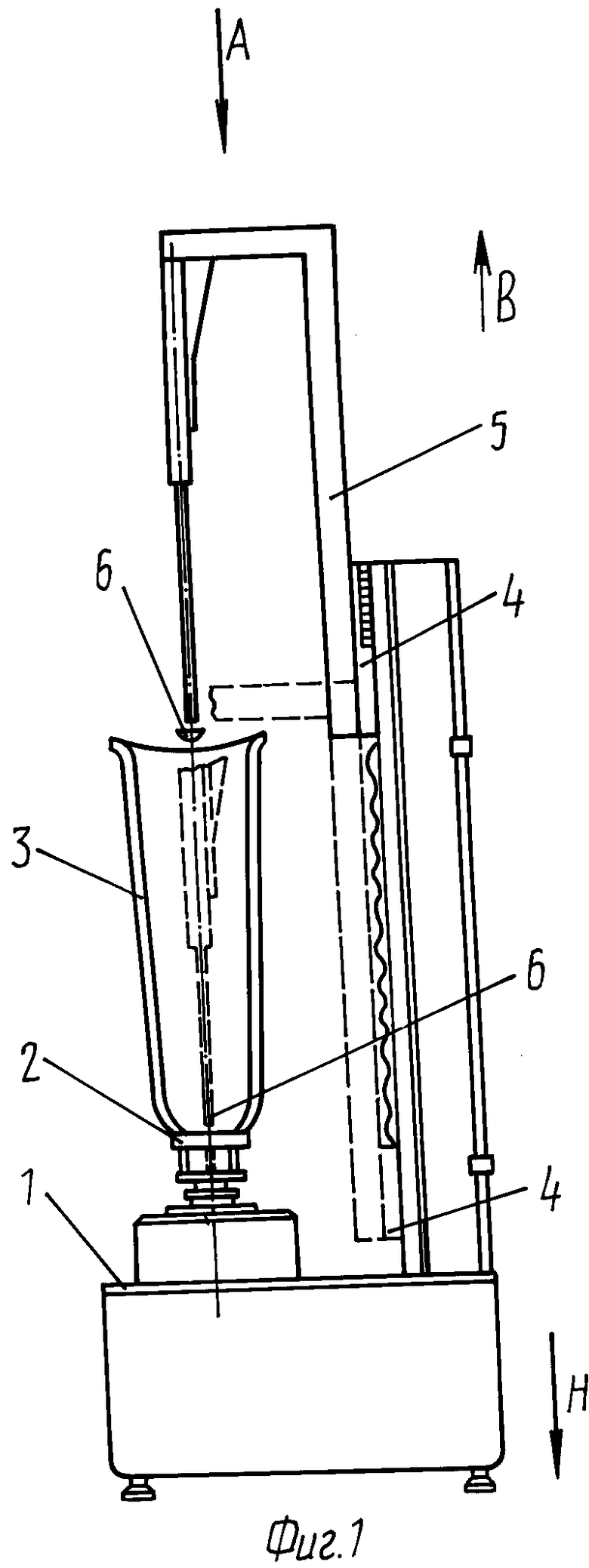
Механизм перемещения измерительного устройства, содержащий основание, размещенный на нем привод вращения опоры для измеряемой детали, установленную на основании колонну, размещенную на колонне с возможностью продольного перемещения каретку и установленную на каретке штангу, несущую датчик, отличающийся тем, что в него введены размещенная на дополнительном валу предохранительная муфта, кинематически связанная с выходным валом привода вращения опоры, барабан, установленный с радиальным и осевым зазорами на корпусе муфты, и по крайней мере один ведущий палец, жестко укрепленный параллельно оси муфты также на корпусе муфты, при этом ведущий палец расположен в барабане с зазором, а на барабане выполнена наружная винтовая канавка, в которой смонтирован канат, концы которого закреплены на размещенной на колонне каретке, а средняя точка контактируемой с винтовой канавкой части каната механически зафиксирована на барабане.
| SU, патент, 1718735, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
