Изобретение относится к измерительной технике, в частности к технике определения смещения между измерительными осями.
Известен способ [1] определения смещения и угла рассогласования между осью вращения платформы и осью перемещения измерительной головки, включающий измерение координат перемещения измерительной головки относительно базовой поверхности с помощью специальных (дополнительных) инструментов и определение смещения и угла рассогласования по результатам измерения.
Недостаток этого способа состоит в сложности определения (дополнительного конструирования) базовой поверхности, однозначно характеризующей с заданной точностью положение измерительной головки относительно этой поверхности, а также в необходимости использования дополнительного измерительного оборудования.
Наиболее близким к предлагаемому является способ [2] определения смещения и угла рассогласования, заключающийся в том, что осуществляют вращение платформы с установленной на ней деталью, перемещают измерительную головку, измеряют расстояние от измерительной головки до точек поверхности детали и по полученным данным определяют смещение и угол рассогласования.
Недостаток этого способа состоит в том, что точность определения смещения и угла рассогласования зависит от конструктивных параметров измерительной установки и регулировочных приспособлений, позволяющих уменьшать величину смещения и угла рассогласования. Точность установки и определения этих величин низка.
Цель изобретения упрощение реализации способа за счет отсутствия необходимости регулировки и повышение точности измерения.
Цель достигается тем, что способ определения смещения и угла рассогласования между осью вращения платформы и осью перемещения измерительной головки, заключающийся в том, что осуществляют вращение платформы с установленной на ней деталью, перемещают измерительную головку, измеряют расстояние от измерительной головки до точек поверхности детали, и само перемещение измерительной головки предполагает в качестве детали использование эталона в виде соосно расположенных цилиндров разных диаметров, ось симметрии которых совмещают с осью вращения платформы, при повороте платформы последовательно фиксируют значения перемещений измерительной головки Hi (i 1, 2) и соответствующие этим перемещениям расстояния Ri (i 1, 2) от оси измерительной головки до боковой поверхности цилиндра одного диаметра, угол рассогласования Φ между осью вращения платформы и осью перемещения измерительной головки определяют по зафиксированным значениям Hi и Ri, формируют сигнал Ki в виде зависимости: Ki= RicosΦ + HisinΦ (i 1, 2) для соответствующих измеренных перемещений измерительной головки Hi (i 1, 2) и расстояний Ri (i 1, 2) от оси измерительной головки до боковых поверхностей цилиндров разных диаметров, а смещение между осью вращения платформы и осью перемещения измерительной головки определяют по измеренным значениям перемещений Hi, расстояний Ri и сигналам Ki.
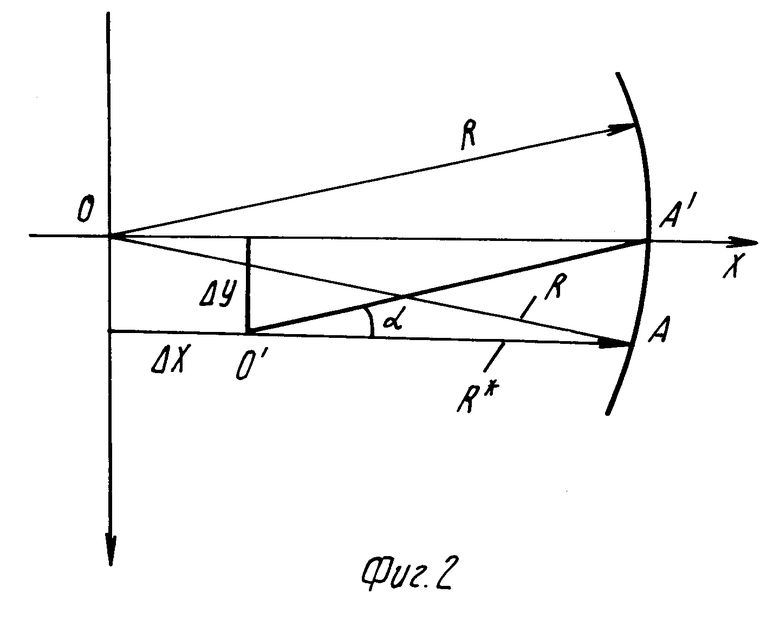
На фиг. 1 представлена схема расположения осей измерения и перемещения измерительной головки и система координат.
На этой схеме X, Y, Z базовая (исходная) система координат (базис J), l1 ось вращения платформы (совпадает с осью 0Z), l2 ось перемещения измерительной головки, X*, Y*, Z* система координат (базис J*), связанная с измерительной головкой (Z совпадает с осью l2), X* перпендикулярна Z* и совпадает с направлением измерения, Y* перпендикулярна плоскости Z*0'X*, 0' начало координат, точка пересечения оси l2 с плоскостью X0Y, Φ угол рассогласования между осями l1 и l2, Dx и Δy -координаты точки О1 в базисе J (смещение оси l2), RH координаты точка A в базисе J, R*, H* координаты точки A в базисе J*.
На фиг.2 изображена проекция осей на плоскость X0Y.
Оценим вначале влияние координат Δx, Δy на погрешность измерения. Для малых значений Δx, Δy и α (фиг.2) имеем:
При R**>> Δy получим: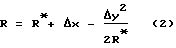
Откуда погрешность ΔR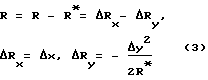
Как следует из /3/, погрешность измерения ΔR линейно зависит от ΔX и нелинейно от ΔY, причем влияние значения ΔY на погрешность ΔR значительно слабее. Например, при R*>> 100 мм, Δy = 2 мм погрешность ΔRy составляет приблизительно 0,01 мм, что значительно меньше Δy.
Учитывая незначительное влияние смещения Δy на погрешность ΔR, будем считать, что ось перемещения измерительной головки параллельна плоскости X0Z.
Рассмотрим процесс определения смещения Δx, Δy и угла рассогласования Φ.
В соответствии с фиг.1 имеем:
где H, R и H*, R* координаты точки A поверхности эталона в базисах J и J* соответственно.
Измерительная установка, реализующая способ, содержит вращающуюся платформу, на которой установлен эталон, имеющий две цилиндрические поверхности диаметром D1 (радиус R1) и D2 (радиус R2), оси симметрии которых совпадают с осью вращения платформы l1.
Процесс определения угла рассогласования Φ осуществляется следующим образом.
На поверхности диаметром D фиксируются две различные точки с координатами R
Из /4/ имеем: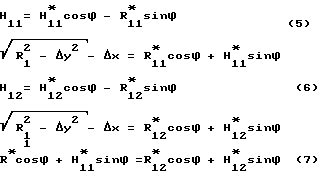
откуда 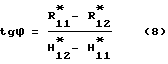
где  относительное перемещение измерительной головки.
относительное перемещение измерительной головки.
Таким образом, производя измерение и фиксацию координат R*, H* двух разных точек поверхности эталона одного диаметра, можно определить угол рассогласования Φ между осью вращения платформы l1 и осью перемещения измерительной головки l2 согласно /8/.
После определения значения v сформируем сигнал Ki (i 1, 2).
Ki= RjcosΦ + H
где R
Как следует из /5/ и /6/, значение сигнала Ki для одного и того же диаметра измеряемой поверхности неизменно и может быть определено для любой точки поверхности с координатами R
Процесс определения смещения Δ = (Δx, Δy) (10)
(10)
реализуется следующим образом. На поверхности эталона радиусом R1 измеряются и фиксируются координаты точки R
Затем формируются сигналы:
Определение смещения Δ производится следующим образом.
Из равенства
находятся значения Δx и Δy.

В способе определение смещения Δ и угла рассогласования v позволяет повысить точность измерения.
Использование способа позволяет свести практически к нулю погрешность измерения DH и ΔP.о
Использование: в измерительной технике для определения смещения между измерительными осями. Сущность изобретения: в способе определения смещения и угла рассогласования между осью вращения платформы и осью перемещения измерительной головки, заключающемся в том, что осуществляют вращение платформы с установленной на ней деталью, перемещают измерительную головку, измеряют расстояние от оси измерительной головки до точек поверхности детали и само перемещение измерительной головки, в качестве детали используют эталон в виде двух соосно расположенных цилиндров разных диаметров, оси симметрии которых совмещают с осью вращения платформы, при повороте платформы последовательно фиксируют значения перемещений измерительной головки Hi(i= 1,2) и соответствующие этим перемещениям расстояния Ri(i= 1,2) от оси измерительной головки до боковой поверхности цилиндра одного диаметра, угол рассогласования Φ между осью вращения платформы и осью перемещения измерительной головки определяют по зафиксированным значениям Hi и Ri, формируют сигнал Ki в виде зависимости Ki=Ricos Φ + Hisin Φ (i=1,2) для соответствующих измеренных значений перемещений измерительной головки Hi(i=1,2) и расстояний Ri(i=1,2) от оси измерительной головки до боковых поверхностей цилиндров разных диаметров, а смещение между осью вращения платформы и осью перемещения измерительной головки определяют по измеренным значениям Hi, расстояний Ri и сигналам Ki. 2 ил.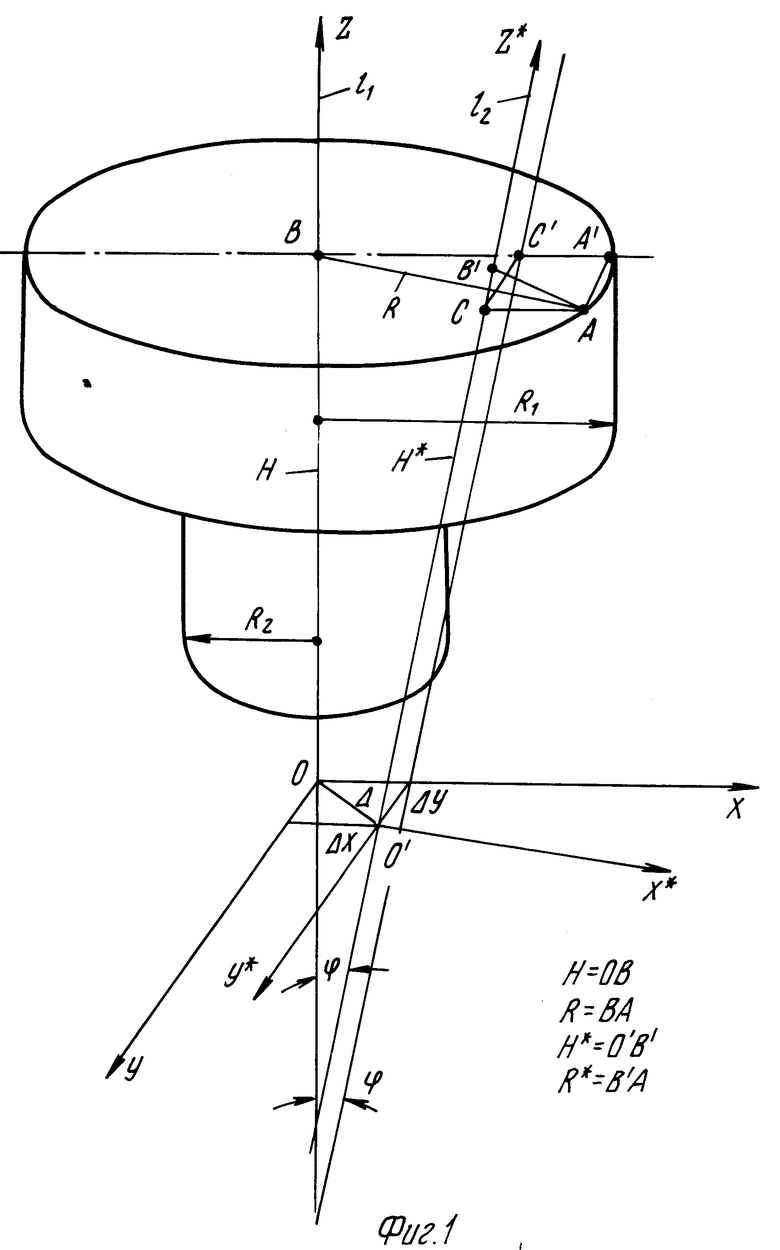
Способ определения смещения и угла рассогласования между осью вращения платформы и осью перемещения измерительной головки, заключающийся в том, что осуществляют вращение платформы с установленной на ней деталью, перемещают измерительную головку, измеряют расстояние от оси измерительной головки до точек поверхности детали и само перемещение измерительной головки, по полученным данным определяют смещение и угол рассогласования, отличающийся тем, что в качестве детали используют эталон в виде двух соосно рассположенных цилиндров разных диаметров, ось симметрии которых совмещают с осью вращения платформы, при повороте платформы последовательно фиксируют значения перемещений измерительной головки Hi (i 1, 2) и соответствующие этим перемещениям расстояния Ri (i 1, 2) от оси измерительной головки до боковой поверхности цилиндра одного диаметра, угол рассогласования Φ между осью вращения платформы и осью перемещения измерительной головки определяют по зафиксированным значениям Hi и Ri, формируют сигнал Ki в виде зависимости Ki= RicosΦ + HisinΦ (i 1, 2) для соответствующих измеренных значений перемещений измерительной головки Hi и расстояний Ri от оси измерительной головки до боковых поверхностей цилиндров разных диаметров, а смещение между осью вращения платформы и осью перемещения измерительной головки определяют по измеренным значениям перемещений Hi, расстояний Ri и сигналов Ki.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Боднер В.А., Алферов А.В | |||
| Измерительные приборы | |||
| - Изд-во стандартов, 1986, с.100, рис.5.4 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Контрольно-измерительное устройство | 1987 |
|
SU1718735A3 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
