Изобретение относится к области контрольно-измерительной техники и может быть использовано при дефектоскопическом контроле нефте- и газопроводов, а также других трубопроводных конструкций.
Известна конструкция магнитного интроскопа, выполненная на основе матричных преобразователей магнитного поля на магниточувствительных ферроиндукционных элементах [1].
Недостатком описанной конструкции является ее низкая чувствительность при выявлении дефектов газопроводов, находящихся под слоем изоляции.
Известен строчный преобразователь магнитных полей, содержащий строку магниточувствительных элементов на основе датчиков Холла [2].
Однако такое устройство обладает низкой надежностью и чувствительностью при выявлении протяженных стресс-коррозионных трещин газопроводов под слоем изоляции.
Наиболее близким по технической сущности к предлагаемому устройству является магнитный ортограф, содержащий передвижное намагничивающее устройство на колесах, сканирующий преобразователь магнитного поля, контроллер преобразователя, видеоконтрольный терминал и масштабно-временной преобразователь [3].
Недостатком этого устройства являются низкие чувствительность и производительность при выявлении протяженных стресс-коррозионных дефектов, находящихся под слоем изоляции, обусловленные влиянием на результаты контроля изменения толщины изоляции, ее отслаивания и коробления.
Задачей изобретения является повышение чувствительности и производительности магнитного интроскопа для контроля газопроводов без снятия защитной изоляции.
Поставленную задачу решают следующим образом. В магнитном интроскопе для контроля газопроводов без снятия защитной изоляции, содержащем передвижное намагничивающее устройство на колесах, сканирующий преобразователь магнитного поля, контроллер преобразователя, видеоконтрольный терминал и масштабно-временной преобразователь, согласно изобретению, масштабно-временной преобразователь и сканирующий преобразователь магнитного поля размещены непосредственно на передвижном намагничивающем устройстве на колесах таким образом, что между полюсами намагничивающего устройства и объектом контроля выполнен зазор, сканирующий преобразователь магнитного поля расположен между полюсами намагничивающего устройства и введен каркас для перемещения по нему передвижного намагничивающего устройства, выполненный из направляющих, связанных с торцов стяжками, размещаемый на поверхности газопровода за счет силы притяжения намагничивающего устройства.
Кроме того, каркас дополнительно крепится на поверхности газопровода за счет постоянных магнитов, жестко размещенных на стяжках каркаса.
Кроме того, в качестве масштабно-временного преобразователя используется оптоэлектронный или магнитный датчик поворота ротора, связанного с одним из колес передвижного устройства.
Кроме того, намагничивающее устройство выполнено на основе П-образного электромагнита или постоянного магнита.
Кроме того, П-образный электромагнит или постоянный магнит выполнен из отдельных полюсов и ярма, скрепляемых посредством корпуса.
Кроме того, полюса П-образного электромагнита или постоянного магнита выполнены из отдельных пластин на основе материалов с большой намагниченностью насыщения и малой коэрцитивной силой, прижимаемых друг к другу за счет винтов корпуса.
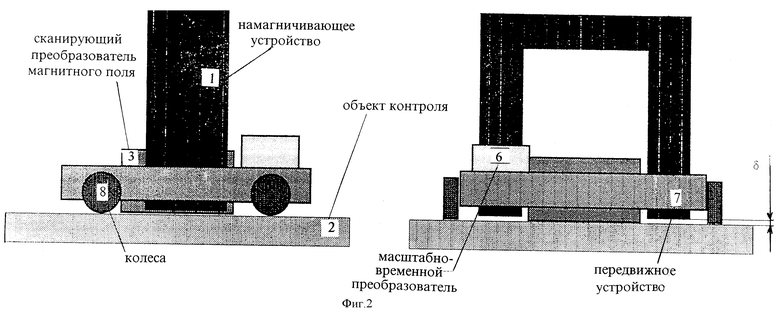
На фиг.1 показана блок-схема устройства.
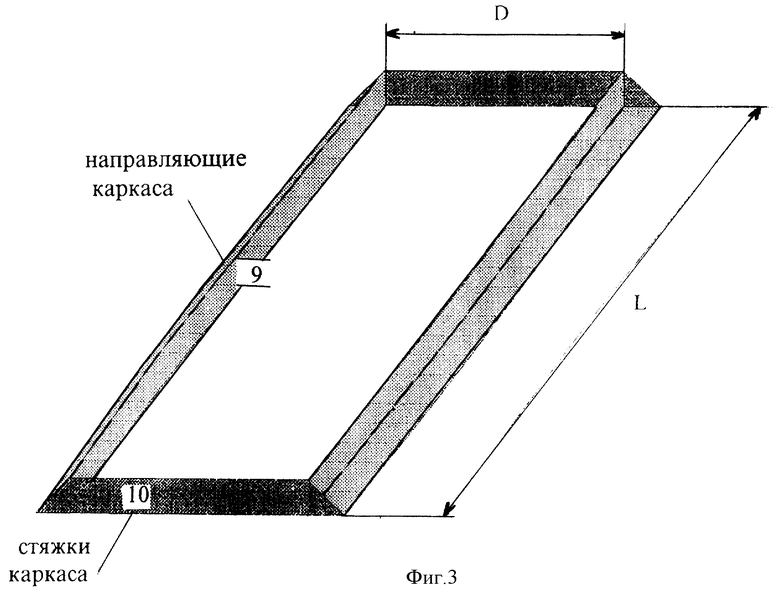
На фиг.2 изображена схема расположения отдельных блоков устройства.
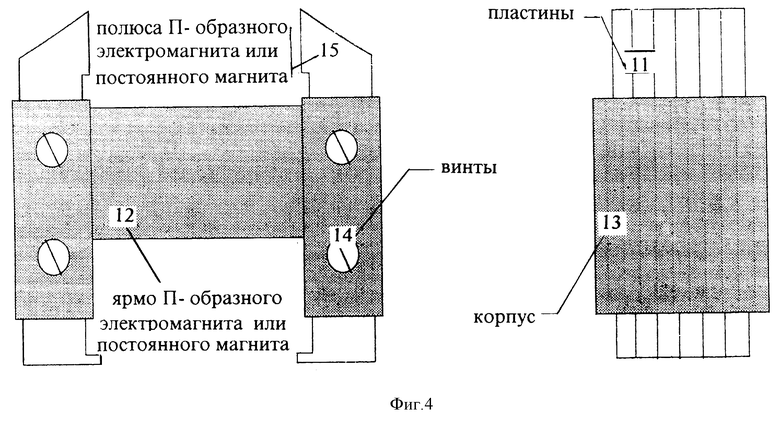
На фиг. 3 представлен каркас для установки подвижного устройства на поверхности газопровода.
На фиг.4 дана конструкция намагничивающего устройства.
Магнитный интроскоп состоит из намагничивающего устройства 1, объекта контроля 2, сканирующего преобразователя магнитного поля 3, контроллера преобразователя 4, видеоконтрольного терминала 5, масштабно-временного преобразователя 6, передвижного устройства 7, колес 8, каркаса с направляющими 9 и стяжками 10, пластин 11 на основе материалов с большой намагниченностью насыщения и малой коэрцитивной силой и ярма 12 П-образного электромагнита или постоянного магнита, корпуса 13, винтов 14, полюсов 15 П-образного электромагнита или постоянного магнита. Намагничивающее устройство 1, масштабно-временной преобразователь 6 и сканирующий преобразователь магнитного поля 3 размещены непосредственно на передвижном устройстве 7 таким образом, что между полюсами 15 намагничивающего устройства 1 и объектом контроля 2 выполнен зазор δ, а сканирующий преобразователь магнитного поля 3 расположен между полюсами 15 намагничивающего устройства 1. Каркас выполнен из направляющих 9, связанных с торцов стяжками 10, размещен на поверхности вдоль оси газопровода и закреплен на нем за счет силы притяжения намагничивающего устройства 1. Кроме того, каркас может быть дополнительно закреплен на поверхности газопровода за счет постоянных магнитов, жестко размещенных на стяжках каркаса. В качестве масштабно-временного преобразователя 6 используется оптоэлектронный или магнитный датчик поворота ротора, связанного с одним из колес 8 передвижного устройства 7. Намагничивающее устройство 1 выполнено на основе П-образного электромагнита или постоянного магнита, каждый из которых может быть выполнен из отдельных полюсов 15 и ярма 12, скрепляемых посредством корпуса 13, и пластин 11 с большой намагниченностью насыщения и малой коэрцитивной силой, прижимаемых друг к другу за счет винтов 14 корпуса 13.
Магнитный интроскоп для контроля газопроводов работает следующим образом.
В основе работы устройства лежит магнитный метод выявления дефектов, заключающийся в обнаружении полей рассеяния, возникающих у поверхности объекта контроля 2 при его намагничивании. Для этого на поверхности газопровода вдоль его оси размещен каркас для перемещения по нему передвижного устройства 7. На передвижном устройстве 7 размещены намагничивающее устройство 1, масштабно-временной преобразователь 6 и сканирующий преобразователь магнитного поля 3, причем сканирующий преобразователь магнитного поля 3 расположен между полюсами 15 намагничивающего устройства 1, представляющего собой П-образный электромагнит (с источником питания, который может быть выполнен, например, на основе аккумулятора типа PS-632 фирмы Power Sonic либо без него) или постоянный магнит. При этом между полюсами 15 намагничивающего устройства 1 и объектом контроля 2 выполнен зазор δ. При перемещении передвижного устройства 7 относительно контролируемой поверхности магнитное поле намагничивающего устройства 1 замыкается через объект контроля 2, в результате чего у его поверхности возникает магнитное поле рассеяния, коррелирующее с внутренней структурой контролируемого участка газопровода. Поскольку передвижное устройство 7 с размещенными на нем элементами перемещается относительно объекта контроля 2, то и поле рассеяния, подлежащее сканированию, перемещается вместе с ним. В то же время, поскольку газопровод, как правило, выполняется из материала с низким значением остаточной индукции, а поле возбуждения составляет порядка 500 А/см, за пределами передвижного устройства 7 поле рассеяния много меньше поля рассеяния непосредственно у полюсов 15 намагничивающего устройства 1 и не влияет на результаты сканирования поля на рабочем участке. Таким образом, достигается более высокое соотношение сигнала и помехи, а значит, достигается более высокая чувствительность устройства.
Намагниченный участок газопровода сканируется посредством сканирующего преобразователя магнитного поля 3, управляемого контроллером преобразователя 4, а информация о распределении поля рассеяния у поверхности объекта контроля 2 отображается в виде яркостной картинки на экране видеоконтрольного терминала 5, связанного со сканирующим преобразователем магнитного поля 3 гибким кабелем или по оптическому либо по радиоканалу. Синхронизация моментов сканирования и скорости перемещения устройства относительно поверхности объекта контроля 2 осуществляется с помощью масштабно-временного преобразователя 6.
Поскольку в процессе контроля большое влияние на точность регистрации дефектов оказывает изменение толщины изоляции на участке контроля из-за ее коробления и отслоения в результате воздействия различных внешних факторов (температуры, влажности, механических и электрохимических воздействий) и неоднородности намотки при производстве трубы, то необходимо уменьшить неоднородность толщины изоляции на участке контроля. В предлагаемом устройстве параллельное перемещение достигается за счет применения каркаса, по которому осуществляется перемещение передвижного устройства.
Поскольку величина магнитной индукции, создаваемая намагничивающим устройством в объекте контроля 2, а следовательно, и чувствительность устройства зависят от зазора δ между полюсами П-образного электромагнита или постоянного магнита и его однородности, в заявляемом магнитном интроскопе намагничивающее устройство 1 выполнено из отдельных полюсов 15 и ярма 12, скрепляемых посредством корпуса 13, а его полюса 15 - из отдельных пластин 11 на основе материалов с большой намагниченностью насыщения и малой коэрцитивной силой, прижимаемых друг к другу за счет винтов 14 корпуса 13. Это позволяет в каждом конкретном случае подобрать требуемую величину зазора δ такой, чтобы поле возбуждения было максимально возможным при заданной степени нарушения защитной изоляции.
Таким образом, удается, не снижая производительности устройства, добиться максимальной его чувствительности при контроле газопроводов без снятия защитной изоляции.
Источники информации
1. Абакумов А.А., Магнитная интроскопия. М., Энергоатомиздат, 1996, с. 194.
2. Патент РФ 2006850. БИ 2, 1994.
3. Патент РФ 2098808. БИ 34, 1997.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНЫЙ ИНТРОСКОП ДЛЯ КОНТРОЛЯ ТРУБОПРОВОДОВ БЕЗ ВСКРЫТИЯ ГРУНТА | 2000 |
|
RU2187100C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАПРАВЛЕНИЯ И СКОРОСТИ ДВИЖЕНИЯ ГРУНТА ОТНОСИТЕЛЬНО ПОДЗЕМНОГО ТРУБОПРОВОДА И НАГРУЗОК НА ТРУБОПРОВОД, ВЫЗВАННЫХ ПЕРЕМЕЩЕНИЕМ ГРУНТА | 2001 |
|
RU2205919C2 |
| СПОСОБ ПРЕДОХРАНЕНИЯ АНТИКОРРОЗИОННОГО ПОКРЫТИЯ ПРИ СТРОИТЕЛЬСТВЕ ТРУБОПРОВОДОВ | 1999 |
|
RU2174641C2 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ЛОКАЛЬНЫХ ДЕФЕКТОВ ПРОВОДЯЩИХ ОБЪЕКТОВ | 2005 |
|
RU2308026C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕКРЫТИЯ ПОЛОСТИ ГАЗОПРОВОДА ПОД ДАВЛЕНИЕМ | 1999 |
|
RU2173810C2 |
| АНОДНЫЙ ЗАЗЕМЛИТЕЛЬ | 1998 |
|
RU2149920C1 |
| СПОСОБ КОМПЛЕКСНОЙ ЗАЩИТЫ ОТ КОРРОЗИИ ЗАГЛУБЛЕННОГО ИЗОЛИРОВАННОГО СООРУЖЕНИЯ | 1997 |
|
RU2151820C1 |
| УСТРОЙСТВО ДЛЯ ИНДИКАЦИИ УРОВНЯ ЖИДКОСТИ В СКВАЖИНЕ | 1999 |
|
RU2175387C2 |
| ЗАГЛУШКА, УСТРОЙСТВО ДЛЯ МОНТАЖА ЕЕ НА ОБЪЕКТ И СПОСОБ МОНТАЖА ЗАГЛУШКИ | 1999 |
|
RU2173811C2 |
| УСТРОЙСТВО СВЯЗИ ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ ПО ТРУБОПРОВОДНОМУ КАНАЛУ | 1997 |
|
RU2170952C2 |
Интроскоп относится к области неразрушающего контроля и может быть использован при дефектоскопии нефте- и газопроводов, а также других трубопроводных конструкций. Интроскоп содержит передвижное намагничивающее устройство на колесах, размещенные на намагничивающем устройстве сканирующий преобразователь магнитного поля и масштабно-временной преобразователь, а также видеоконтрольный терминал. Интроскоп содержит каркас для перемещения по нему намагничивающего устройства. Каркас выполнен из направляющих, связанных с торцов стяжками. Размещается каркас на поверхности устройства за счет силы притяжения намагничивающего устройства, а также за счет силы притяжения постоянных магнитов, жестко размещенных на стяжках каркаса. Результатом перемещения намагничивающего устройства и размещенного между его полюсами сканирующего преобразователя по каркасу является поддержание постоянного зазора между преобразователем и контролируемой поверхностью, не зависящего от изменения толщины изоляции, и повышение точности регистрации дефектов. 5 з.п. ф-лы, 4 ил.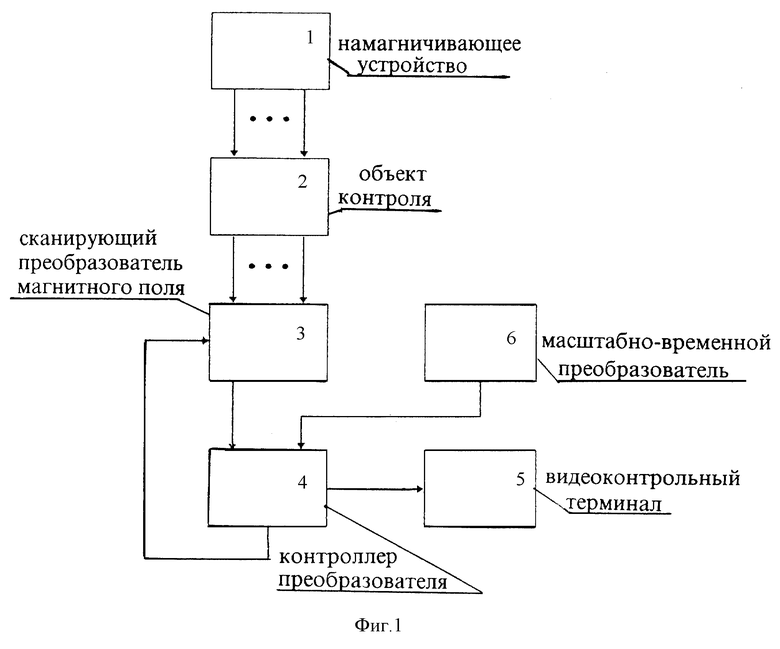
| МАГНИТНЫЙ ОРТОГРАФ | 1995 |
|
RU2098808C1 |
| СПОСОБ ПОЛУЧЕНИЯ ФТОРИСТОГО КАЛЬЦИЯ | 2001 |
|
RU2188156C1 |
| RU 94042545 А1, 20.09.1996 | |||
| СТРОЧНЫЙ ПРЕОБРАЗОВАТЕЛЬ МАГНИТНЫХ ПОЛЕЙ | 1988 |
|
RU2006850C1 |
| АБАКУМОВ А.А | |||
| Магнитная интроскопия | |||
| Учебное пособие для вузов | |||
| -М.: Энергоатомиздат, 1996, с.194-200 | |||
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |

