Предлагаемое изобретение относится к области авиационной техники и предназначено для повышения точности автоматического наведения управляемой планирующей парашютной системы (УППС) на радиомаяк (РМ).
Известен способ, реализованный в устройстве [1] сущность которого заключается в осуществлении пролетов над радиомаяком последовательно в прямом и обратном направлениях.
Недостатком этого способа является сильная зависимость точности и условий посадки от величины и направления горизонтального ветра.
Наиболее близким из известных технических решений повышения точности посадки является способ, основанный на использовании разворота парашюта в направлении, противоположном тому, выдерживая которое, парашют входит в контрольный конус [2; способ B] Сущность способа заключается в программном выборе команды виража после входа парашюта в контрольный конус и поддержании режима до момента выхода из контрольного конуса.
Недостатком этого способа, как показали результаты математического моделирования, остается большая вероятность того, что при сбросе парашюта в наветренной стороне от радиомаяка при радиальном наведении парашютная система уходит вбок и снос парашюта в подветренную зону затягивается (что приводит к недолету), а при малых скоростях ветра и сбросе парашюта в пределах конуса затягивается выход из контрольного конуса, происходит нерасчетная потеря высоты и после разворота парашюта на радиомаяк ввиду малой высоты происходит недолет.
Задача состоит в повышении точности наведения.
Техническим результатом предлагаемого решения является переведение УППС перед началом точного наведения (в том числе при сильных ветровых возмущениях) в подветренную зону. Для достижения решения технической задачи в способе автоматического наведения планирующей парашютной системы на радиомаяк, включающем измерения высоты полета, сигнала бортовой радиопеленгационной системы о местонахождении планирующей парашютной системы внутри или вне контрольного конуса над радиомаяком и измерения сигналов угла курса планирующей парашютной системы относительно радиомаяка, парашютную систему сбрасывают в пределах контрольного конуса над радиомаяком, назначают контрольную высоту Hконтр, измеряют текущую высоту, измеряют сигнал от бортового радиопеленгатора о нахождении планирующей парашютной системы в пределах контрольного конуса, подтягивают левую или правую стропу управления для спирального спуска УППС до тех пор, пока или высота не будет меньше контрольной, или УППС не выйдет из контрольного конуса, после чего измеряют угол курса планирующей парашютной системы относительно радиомаяка, подтягивают левую или правую стропу управления для стабилизации курса УППС на радиомаяк.
На чертеже схематически показаны основные маневры УППС при осуществлении наведения согласно предлагаемому способу.
Способ осуществляется следующим образом.
Сброс парашюта осуществляют в пределах контрольного конуса, т.е. при угле места ε>εx где εx 70 75o. Назначают контрольную высоту полета Hконтр, измеряют текущую высоту, например, с помощью баровысотомера; получают от бортового радиогенератора сигнал о нахождении УППС в пределах контрольного конуса ε>εx; при H > Hконтр и ε>εx подтягивают левую или правую стропу управления для спирального спуска УППС до тех пор, пока одно из указанных условий H > Hконтр или ε>εx не будет нарушено; после этого стабилизируют курс полета УППС "на РМ" или "от РМ" согласно одному из известных способов наведения [2] [3]
При выполнении указанных действий под влиянием горизонтального ветра УППС сносится в подветренную сторону от РМ, что существенно улучшает вероятность успешного применения способов наведения, например [2] [3] благодаря подготовке исходной позиции УППС перед началом точного наведения.
Одно из преимуществ предлагаемого решения заключается в том, что для его использования необходим минимум навигационной информации.
Проведенное математическое моделирование подтверждает эффективность предложенного решения.
Литература
1. Великобритания. Заявка N 2165963, 1978 г. G3N H4L UIS IntCl4, G05 D 1/02 // 1/12.
2. T.F. Goodrick, A. Pearson, A.L. Murphy. Analysis of Various Automatic Homing Techniques for Gliding Airdrop Systems with Comparative Performance in Adverse Winds. AIAA Paper No 73-462, 1973 (see Method B, p.8).
3. T. F. Goodrick, A. Pearson, A.L. Murphy. AIAA Paper No 73-462, 1973 (see Method C, pp.8, 9).
Изобретение относится к области авиационной техники и предназначено для повышения точности автоматического наведения управляемой планирующей системы /УППС/. Технический результат заключается в том, что назначают контрольную высоту Hконтр, измеряют текущую высоту, измеряют сигнал от бортового радиопеленгатора о нахождении планирующей парашютной системы в пределах контрольного конуса, подтягивают левую или правую стропу управления для спирального спуска УППС до тех пор, пока или высота не будет меньше контрольной, или УППС не выйдет из контрольного конуса, после чего изменяют угол курса планирующей системы относительно радиомаяка, подтягивают правую или левую стропу управления для стабилизации курса УППС на радиомаяк. 1 ил.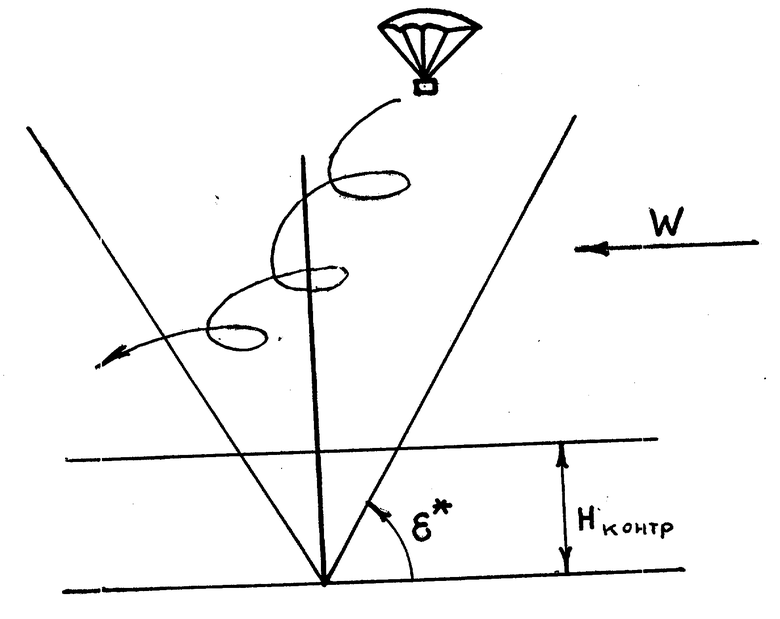
Способ наведения парашютной планирующей системы на радиомаяк, при котором измеряют текущую высоту полета, определяют местонахождение парашютной планирующей системы внутри или вне контрольного конуса над радиомаяком по сигналу бортовой радионавигационной системы и определяют курс парашютной планирующей системы на радиомаяк, отличающийся тем, что задают контрольную высоту полета, парашютную планирующую систему сбрасывают в пределах контрольного конуса над радиомаяком и осуществляют спиральный спуск до тех пор, пока или текущая высота полета не будет меньше контрольной или парашютная планирующая система не выйдет из контрольного конуса, после чего направляют парашютную планирующую систему по курсу на радиомаяк, который стабилизируют.
| T.F.Goodrick, A | |||
| Pearson, A.L.Murphy Analysis of Various Automatic Homing Techniques for GLiding Airdrop Systems with Comparative Performance in Adverse Winds AIAA Paper N 73-462, 1973. |

