Изобретение относится к радиотехнике и может использоваться в азимутальном канале радиотехнических систем ближней навигации ( РСБН).
Цель изобретения - повышение помехо- устойчивости и точности.
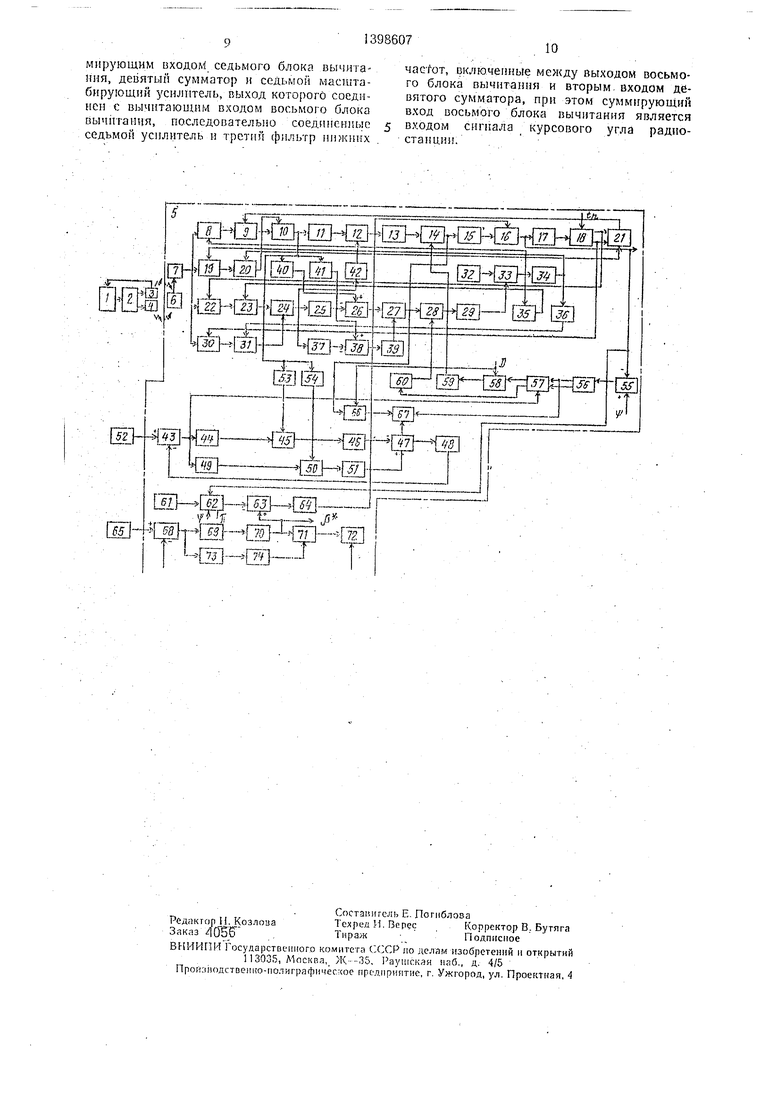
На чертеже представлена структурная элекп рическая схема иредлагаемой системы.
Система содержит наземный радиомаяк, вадючающий шифратор опорных сигналов (ШОС) 1, передающий блок 2, вращающую- ся Напраоля ои1ую антенну 3 я ненаправленную антенну 4, бортовое приемо-измеритель- ное устройство 5, вкючаюшее антенну 6, приемник 7, первые синхронный детектор 8, временной разлнчитель 9, сумматор 10, уси- литель И, блок 12 вычитания, интегратор 13, второй сумматор Ц, второй интегратор 15, третий сумматор 16, первый мг сшта- бирующий усилитель 17, формирователь 18 «мпульсов, второй синхронный детектор 19, второй временной разлнчитель 20, формнро- ватель 21 селектирующих импульсов, первый ключ 22, нервый фазовый детектор 23, четвертый сумматор 24, второй усилитель 25, второй блок 26 вычитания, нятый сумматор 27, шестой сумматор 28, третий инте-. гратор 29, второй ключ 30, второй фазовый детектор 31, генератор 32 онорных колебаний, управлящнй фазовращатель 33, фазовращатель 34 на 180°, фазовращатели 35 и. 36 на 90°, третий усилитель 37, третий блок 38 вы- читання,- первый фильтр ннжних частот, (ФНЧ) 39, усилители 40, 41 и 42 коррекцни, четвертый блок 43 вычитания, четвертый усилитель 44, седьмой сумматор 45, четвертвн1 интегратор 46, пятый блок 47 вычитания, второй масштабирующий усилитель 48, пятый усилитель 49, восьмой сумматор 50, второй ФНЧ 51, измеритель 52 скорости, третий и четвертый масщтабирующие усилители 53 и 54, шестой блок 55 вычитания синусно-косипусной преобразователь (СКП) 56, иервьп блок 57 умножения, первый блок 58 деления, пятый масштабирующий усилитель 59, шестой масштабируюилий усилитель 60, задатчик 61 угла схождения ме- ридиапов.блок 62 алгебраичрского сложения, седьмой блок 63 вычитания, седьмой масшта- бируюи ий ус 1литель 64, автоматический радиокомпас (АРК) 65, второй блок 66 умно- жепня, вторЬй блок 67 деления, восьмой блок 68 вычитания, шестой усилитель 69, нятый интегратор 70, девятый сумматор 71, седьмой масштабирующий усилитель 72, седьмо усилитель 73 и третий ФНЧ 74.
Система работает следующим образом.
Канал непрерывного излучения передающего блока 2 на|-ружеп ira антР1гну 3, которая имеет двухлснестковую Jl,l;l в горизонтальной плоскости, вращаюи.1уюсп со ско- ростЬю 100 об/мин. Летательные аппараты находящиеся в зоне действия системы нод разными а.чимутами, облучаются последовательно в разные моменты времени. В результате этого в момент облучения ЛА на выходе антенны 6 выделяется азимутальный радиосигнал i(i). Для передачи опорного сигнала в «северный момент времени используются серии опорных имнульсов «35 и «36, которые вырабатываются с помощью специальных датчиков, и поступают п ШОС 1 а затем - в импульсный канал блока 2, нагруженного на ненаправленную антенну 4. Излученные антенной 4 онорпые радиоимпульсы серий «35 и «36 принимаются на борту ЛА и декодируются в приемнике 7. Импульс «северного совпадения; временное „ положение которого является началом отсчета азимута, формируется в приемнике 7 блока совпадения. Импульс «северного совпадения также используется для запуска формирователя 18. Из приемника 7 после нреоб- разовання и усиления азимутальный сигнал поступает на входы синхронных селекторов В и 19, на другие входы которых поступают сигналы с выходы геператора 32 соответственно через фазовращатель 33 и фазовращатель 34, осуществляющего поворот фазы опорного сигнала на 180°. Выходные напряжения детекторов 8 и 19 в виде видеоимпульсов попадаются на временные различи- тели 9 и 20, на которые также с выходов формировате,дя 2 постунают селекторные имг пульсы, соответствующие рашшм и поздним стробам. Временные различители 9 и 20 формируют нанряжения, характеризующие отклонения осей видеоимпульсов относительпо осей симметрии соответствующих стробов. С выхода сумматора 10 снимается результирующий сигнал ощибкн, характеризующий отклонение оси симметрии азимутального радиосигнала от соответствующей оси симметрии следящих стробов, и через .усилитель 11 и блок 12 подаются на интегратор 13, выходное напряжение которого пропорционально скорости 1 зменення азимута ЛА. Напряжение с выхода интегратора 13 подается ни первый вход сумматора 14, па второй вход которого с выхода масштабирующего усилителя 59 подается напряжение, пропорциональное ошибки тангенциальной составляющей (i)-Q) путевой скорости полета ЛА. Напрян ение с выхода сумматора 14 подается iia вход интегратора 15, с выхода которого снимается напряжение, пропорциональное измеряемому азимуту ЛА. Указанное напряжение с выхода интегратора 15 подается на первый вход сумматора 16, на второй вход которого с выхода блока 63 через масштабирующий усилитель 64 подается напряжение, пронорцпональ- пое разностп между истинным и измеренным значениями азимута.
Ввод сигналов, пропорциональных AlF и AQ, в кольцо слежения за измеряемым -азимутом ЛА позволяет донолнительно сузить полосу пропускания (без увеличения динамических ошибок) устройства 5 и повысить его помехоустойчивость при воздействии
преднамеренных i: непреднамеренных радиопомех.
Осуществление в предлагаемом техническом решении скоростной н позиционной коррекции также позволите - в последующем бо- лее точно определить временное /« положе- Hi-ie ожидаемой оси симметрии азимутального радиосигнала.
Это особенно важно, при таких негативных явлениях, как случайные пропадания азимутального радиосигнала и при наличии мешающих переотражений от местных пред- . метов, что является х;-;рактерным для систем такого класса.
Напряжение с выхода сумматора 16 подается на вход масштабирующего усилите- ля 17, выходное напряжение которого характеризует временное /e iT-Q положение
zn
оси симметрии азимутального сигнала (Г- период вращения антенны). Напряжение с выхода масштабирующего усилителя 17 воздействует на формирователь 18. в котором осуществляется формирование двух импуль- сов, временное tg положение оси симметрии которых соответствует ожидаемой оси сим- метрии азимутального радиосигнала. Выходные импульсы формирователя 18 подаются на формирователь 21, п котором осуществляется формирование соответствующих ранних и поздних стробов. Кроме того, выходными импульсами формирователя 18 стробируются ключи 22 и 30, на первые входы которых по- ступгет с выхода приемника 7 азимутальный радиосигнал. Азнмутальньи : сигнал с выходов ключей 22 и 30 подается на первые входы соответствующих фазовых детекторов 23 и 31, на другие входы которых подаются онорные сигналы с выходов первого 35 и второго 36 фазовращателей, осуществляющих поворот на 90 фазы сигналов, снимаемых с выходов фазовращателей 33 н 34. Выходные напряжения фазовых детекторов 23 и 31, величины которых определяются фазовым рассогласованием между сигналами, поступающими на них, подаются на со- ответствуюндие входы сумматора 24, а выходное напряжение последнего через усилитель 42 и усилитель 25 подается на вычитаю- щие входы соответственного первого 12 и второго 26 блоков вычитания, на суммирующий вход блока 26 подается через усилитель 40 сигнал ощибки с выхода сумматора 10. Выходное напряжение с выхода блока 26 Подается на первый вход сумматора 27, на вто- рой вход которого подастся сглаженное напряжение оценки флуктуации частоты , обусловленных техгшческими несга- бильностями задающего четвертого генератора радиомаяка () и влиянием условий распространения радиоволны но клналу свя- зн «РМ-ЛА. При лтом укузлипос напряжение формируется сглаживающей пеночкой, включенной глежду выходом четвертого 24 и вторым входом шггоп) 27 cy ni;iгпpoR и соетааляющсй из паследовательно соединенных усилителя 37, блока 38 и первого ФНЧ 39. При этом на суммирующий вход блока 38 через усилитель 4 с соответствующим «весом подается с выхода сумматора 10 напряжение сигнала ощибки. Результирующее напряжение с выхода сумматора 27 подается на вход сумматора 28, на второчи вход которого подается с выхода масщтаби- рующего усилителя 60 напряжение, tipo- порциональное ошибке радиальной составляющей путевой скорости полета ЛА, что позволяет учесть изменение частоты применяемого радиосигнала, обусловленное эффектом Доплера. Напряжение с выхода сумматора 28 подается на вход интегратора 29, выходным напряжением которого, пропорциональным оценке фазы принимаемого радиосигнала в фазовращателе 33, осуществляется фазовая подстройка опорного сигнала, вырабатываемого генератором 32. Тем самым устраняется фазовое рассогласование между сигналами, поступающими на синхронные и фазовые детекторы 8, 19 и 23, 31.
На первый вход блока 43 поступает с выхода измерителя 52 скорости (например, канала скорости СВС или канала скорости ИНС) сигнал 2(О, содержащий информацию о путевой скорости /IA, хотя и с ошибками, обусловленными иаличиямн ветра и собственными ощибками канала СВС. На вычитающий вход блока 43 поступает опорный сигнал с выхода второго масштабирующего усилителя 48. Сигнал ощибки с выхода блока 43, пропорциональный разности между наблюдаемым сигналом |2(/) и опорным сигналом ири заданном 2{t), через усилители 44 и 49 поступает на первые входы сумматоров 45 и 50, на другие Входы которых с. выхода сумматора 10 подаются соответственно через масштабирующие усилители 53 и 54 корректирующие сигна.(Ы с «весами, соответственно равными коэффициентам передачи указанных усилителей. Сигналы с выходов сумматоров 45 и 50 через интегратор 46 и ФНЧ 51 поступают соответственно на вычитающий и первый суммирующий входы блока 47, выходной сигнал которого после масштабирования в усилителе 48 подается в качестве опорного сигнала на вычитающий вход блока 43. Сигнал ошибки с выхода блока 43 подается на третий вход блока 57, на первый и второй входы которого с соответствующих выходов СКП 56 подаются на- , соответственно пропорциональные 5т() и C os.(). При этом формирование сигнала, пропорционального разности истинного курса Ч и азимута Q осуществляется в блоке 55, суммирующий вход которого является входом сигнала курса, снимаемого, например с ИНС или курсовой системы, а на его вычитающий вход подается с выхода сумматора 16 напряжение, пропорциональное оценке Q. В блоке 57
.осуществляется формлров ание таягенциаль- . 1(ой () н радиальной (F-Q) составляющих ошибок оценки Путевой CKOpocTnW. Напряжение с перпо- тЬ выхода блока 61, пропорциональное 5 ) подается на первый вход блока 58, второй вход которого является входом сигнала дальности D линии радиосвязи «ЛА-РМ, снимаемого с выхода, например дальномерного канала РСБН. С выхода бло- .. ка 58 напряжение, пропорциональное
А , через масштабирующий
усилитель 39 подается па второй вход сум- ifiaTOpa И. Со второго входа блока 57 сии- jj ijiaeTcn напряженне, пропорционально (V-Q), и через масштабирующий усилитель 60, выходное напряжение которого пропорционально -&.(4 -Q) {с-
20
-3- 10 м/с. О) - несущая частота азимутального радиосигнала, подается на вход сумматора 28 канала оценивания фазы радиосигнала.
Отличительной особенностью предлагае
лого технического решения является использование в качестве корректирующего сигнала напряжения, пропорциоиального , а не 11, как это сделано в прототипе, что приводит к улучшению характеристик точности и помехоустойчивости следящей системы, Кроме того, принципиальным отличием предлагаемой системы, является то, что формирование тангенциальной составляющ,ей
-Lw Sin{4 - Q) осуществляется в канале
слежения за азимутом, которая далее в виде
напряжения, пропорционального W, используется для формиррвашигопорного сигнала |(0. Формирование этого напряжс1П1я осуществляется блоками 66 и 67. Для этого на первый вход блока 66 с выхода суммато- ра И подается напряжение, пропорциональное Q, а па второй его вход - чапрл- жение, пропорциональное D. На пряжение с выхода блока 66 подается на первый вход блока 67, на второй вход которого подает- ся С-первого выхода СКП 56 напряжение, пропорциональное Sw(4 -Q). В результате этого с выхода блока 67 снимается напряжение, пропорциональное W, и подается на второй суммирующий вход блока 47. Это напряжение содержит существенно меньшую погрешность измерения W, а это обеспечивает более точное формирование onopiioro в блоке 47 и усилителе 48. В итоге это позволяет в блоке 43 более точно сформировать сигнал ошибки, который далее, как указывалось, подается на третий вход бло- ка. 57 н. используется для формирования соответствующих сигналов коррекцпи.
.Разделение полезной информации, содержащейся R сигнале АРК 65 и флуктуа.
j
0
5
n
5
0 .. сп 55
ционной ошибки бр, а также ее оценка и сглаживание ошибки бр в предлагаемом техническом решении осуществляется следую- щим образом.
На суммирующий вход блока 68 подется с выхода АРК 65 сигнал 5з(/), содержащий, хотя н с больц имн ошибками, чем азимутальный радиосигнал РМ, информацию об азимуте ЛА. При этом наибольший вес в указанных ошибках в сигнале АРК имеет флуктуациопная ошибка бр. На вычитающий вход блока 63 с выхода седьмого масштабирующего усилителя 72 подается опорный сигнал э(0- Сигнал ошибки с выхода блока 68, пропорциональный разности между наблюдаемь.1м сигналом |з(0 опорным сигналом при .заданном |з{0, через усилители 69 и 7 3 поступает па п)ггсгратор 70 и ФНЧ 74. При этом с выхода интегратора снимается нанряжен1 е пропорциональное оценочному значению КУР р, а с выхода ФНЧ 74Цагфяжение, пропорциональное сгла-. женному значению ошибки бр. При этом сигнал, снимаемый с выхода интегратора 70, со.аержит существенно меньшую флук- туациоиную ошибку. Выходные нанряжения интегратора 70 и ФНЧ 7-4 подаются па сумматор 71 и далее после масштабирования в усилителе 7 используются в качестве опорного сигнала. Кроме того, с .выхода интегратора 70 напряжение, пропорциональное оценочному значению КУР и содержащее информацию об озимуте ЛА, подается на Суммирующий вход блока 63. На вычитающий вход блока 63 подается напряжение, пропорциональное вычислительному .значению КУР pfc Q 4 -S-я., .который формируется в блоке 62 в соотдетСтвии с выражением р-Q-H -б-я, где ;F--истинный курс; б -- УГО.Л схождения меридианов.
Г1ри этом в заоисимости от взаимного расположения ЛА и РМ с приводной радиостанцией знаки величин бил могут быть различными. Поэтому в блоке 62 осуществляется алгебраическое суммирование сигналов, пропор)1.иональных соответствующим навигационным параметрам.
На первый вход блока 62 с выхода сумматора 16 подается напряжение, пропорциональное оценочному значению Q, а ha второй его вход с .да задатчика 61 - напряжение, пропорциональное углу схоисдения ме- ридиаиов в точке местоположения наземных РМ. и приводной радиостанции (ПРС), точк« размещения которых предполагаются совмещенными. На третий и четвертый входы блока 62 подаются напряже шя, пропорциональные Текущему значению курса V и постоянной величине л. .
С выхода блока 63 снимается сигнал ошибки, пропорциональный разпостн между оценочным и вычисленным значениями КУР. Этот разностный сигнал содержит существенно л{еньшую флуктуационную ошибку и гюсле масштабирования в усилителе 64 подается на второй вход сумматора 16.
Формула изобретения Комплексная радионавигационная снстег на измерения азимута летательного аппарата относительно рад омаяка, содержащая наземный радиомаяк, включающий последовательно соединенные шифратор опорных сигналов, передающий блок и вращающуюся напргплеиную антенну, выход сигнала «Север которой соединен с сиь хронизирую- щим входом щифратора опорных сигналов и иенаправленную антенну, вход которой соединен с вторым выходом передающего блока, бортовое приемо-измерительное устройство, вкючающее последовательно соединенные антенну, приемник, первые синхронный детектор, временный разлнчитель, сумматор, усилитель, блок вычитания, интегратор, второй сумматор, второй интегратор, третий сумматор, первый масштабирующий усилитель и формирователь импульсов, по- следопательно соединенные вторые синхронный .детектор и временный различитель, включенные между выходом приемника и вторым входом первого сумматора,-формирователь селектирующих импульсов, первый и второй входы которого соединены с соответствующими выходами формирователя импульсов, а первый и второй выходы соединены сстробирующими входами соответственно первого и второго временных различителей,- последовательно соединенные первый ключ, первый фазовый детектор, четвертый сумматор, второй усилитель, второй блок вычитания, пятый сумматор, щестой сумматор и третий интегратор, последовательно соединенные второй ключ и второй фазовый детектор, выход которого соединен с вторым входом четвертого сумматора, выход приемника соединен с входами первого и второго ключей, управляющие входы которых соединены соответственно с первым и вторым выходами формирователя импульсо в. последовательно соединенные генератор опорных колебаний, управляемый фазовращатель, управляющий вход которого соединен с выходом третьего интегратора, и фазовращатель на 180°, причем выходы управляемого фазовращателя и фазовращателя на 180° соединены с опорными входами соответственно первого и второго синхронных детекторов не- посредствегпю, а через первый и второй фазовращатели на 90 с опорными входами соответственно первого и второго фазовых детекторов, последовательно соединенные третий усилитель, третий блок вычитания и первый фильтр нижних частот, включенные между выходом четвертого сумматора и вторым входом пятого сумматора, первый и второй усилители коррекции, входы которых соединены с выходом первого сумматора, а выходы - с суммирующими сходами соответственно второго и -третьего блоков вычитания, третий усилитель коррекции, включенный между в})1ходом четвертого сумматора и вычитающим входом первого блока вычитания, послсаовательно соединенные четвертый блок вы :тания. ,5( v-ib iHTe.nb, седьмой сумматор, четг ертый ии гегратп), ПИТЫЙ блок вычитания и втсрой мосштаб;:- рующий усил1 .тель, выход которого соединен
5 с вычитающим входом четвертого блока вычитания, П :)следовате.чь;ю соединенные пятый усилитель, восьмой сумматор и второй фильтр ,чмжиих частот, включенный между выходом четвертого и первым суммирую- щим входом пятого блоков вычитания, при этом суммирующий вход четвертого блока вычитания является входом сигнала скорости измерителя скорости, а вывод первого сумматора через третий и четвертый масщта- бирующие усилители соответственно подклю5 чей к вторым входам седьмого и восьмого сумматоров, последовательно соединенные шесгой блок вычитания и синусно-косинус- ный преобразователь, последовательно соединенные блок умножения, блок деления и пятый мacuJтaбяpyющий усилитель, выход
которого соединен с вторым входом второго сумматора, при этом первый и второй выходы синусно-косннусного преобразователя соединены соответственно с первым и вторым входами блока умножения, второй вы5 ход которого через шестой мас1итабиру о- щий усилитель соединен с вторым входом шестого сумматора, причем суммирующий вход шестого блока вычитания является входом сигнала курса, а выход третьего сумматора является выходом комплексп.ой радио- 0 нзнигацнонной системы измерения азимута летательного аппарата относительно наземного радиомаяка, второй вход блока деления является входом сигнала дальности до наземного радиомаяка, последовательно сое- . диненпые задатчнк угла схождения меридиа5 нов, блок алгебраического суммирования, седьмой блок вычитания и седьмой масщта- бирующий усилитель, выход которого соединен с вторым входом третьего сумматора, причем третий вход блока алгебраического суммирования является входом сигнала пропорционального л, а четвертый выход - входом сигнала курса, отличающийся тем, что, с целью повышения помехоустойчивости и точности, в нее введены второй блок умно- , первый и второй входы которого
г соответственно соединены с выходом второго сумматора и вторым входом первого блока деления, второй блок деления, первый и второй входы которого соединены соответственно с выходом второго блока умножения и первым выходом синусно-косинуснрго преоб0 разователя, а выход второго блока деления - с вторым суммирующим входом пятого блока вычитания, при- этом третий вход первого блока умножения соедимен с выходом четвертого блока вычитания, выход третьего сумматора соединен с вычитающим
5 входом щестого блока вычитания и первым входом блока алгебраического суммирования, последовательно соединенные восьмой блок вычитания, шестой усилитель, пятый интегратор, выход которого соединен с сум0
мнрующим входом седьмого блока вычитания, девятый сумматор н седьмой масштабирующий усилитель, выход которого соедм- исн с вычитающим входом восьмого блока гзычптания, последовательно соедиисн1 ые седьмой усилитель и третий фильтр иижиих
частот, включенные между выходом восьмого блока вычитания и вторым, входом девятого сумматора, при этом суммирующий вход восьмого блока вычитания является входом сигнала курсового угла радиостанции. . 
| название | год | авторы | номер документа |
|---|---|---|---|
| Система измерения азимута летательного аппарата относительно радиомаяка | 1984 |
|
SU1181398A1 |
| Комплексный доплеровский измеритель скорости подвижного объекта | 1985 |
|
SU1347721A1 |
| КОМПЛЕКСНАЯ СИСТЕМА ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1992 |
|
RU2022297C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2518428C2 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 2000 |
|
RU2176399C1 |
| Бортовая комплексная система измерения дальности и азимута | 1987 |
|
SU1529951A1 |
| ВСЕНАПРАВЛЕННЫЙ РАДИОПЕЛЕНГАТОР | 1996 |
|
RU2126978C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2426143C1 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 1997 |
|
RU2108595C1 |
| Комплексный измеритель дальности | 1986 |
|
SU1396103A1 |
Изобретение относятся к радиотехнике. Цель изобретения - повышение помехоустойчивости и точности. Введены 2-й блок 66 умножения, 2-й блок 67 деления, 8-й блок 68 вычита1| Ш, 6-й у-ль 69, 5-й интегратор 70, 9-й сумматор 71, 7-й масштабирующий у-ль 72, 7-й у-ль 73 1 3-й фильтр 74 нижних частот. Канал непрерывного излучения передающего блока 2 нагружен па антенну 3, к-рая имеет двухлепестковую ДН в горизонтальной плоскости, вращающуюся со скоростью 1.00 об/мин. В момент облучения летательно- То аппарата (ЛА) на выходе антенны 6 выделяется азимутальный радиосигнал. Для передачи опорного сигнала в «северный момент времени используются серии опорных импульсов 35 и 36, к-рые вырабатываются с помощью специальных датчиков и поступают в шифратор 1 опорных сигналов, а затем в импульсный канал передающего блока 2, нагруженного на ненаправленную антенну 4. Излучошые антенной 4 импульсы серии 35 и 36 принимаются на борту ЛА и декодируются в npiieMiiHKc 7, .пьс «северного совпадения, временное положение к-рого является началом отсчет, азимут,, формируется в прием 1;и.е 7. Этот импульс также используется для запуска формирователя 18 им- пульсоа. Из npjiCMHinfa 7 сигнал поступает на входы синхронных селекторов 8 н -19, на др. входы к-рых поступают сигналы с г-ра 32 опорных колебаний соответственно через фя- зовращатели 33 и,34, осуществляющего ло- ворог фазы onopnoi o сигнала на hSO . Выходные напряжения синхронных детекторов 8 и 19 в виде видеоимпульсов попадают на временные различителк 9 и 20, на к-рые с формирователя 21 селектирующих импульсов поступают импульсы, соответствующие ранним и поздним стробам. С сумматора 10 снимается сигнал ошибки, характеризующий отклонение оси симметрии азимутального радиосигнала от оси следящих стробов. I ил. S САЭ СО 00 оь о ч
..-.L....«;...j..,Jb.-. ,ГШ- r:.-.z:i
тЧЖ1 - Я- --1 7П-- И
I V---- L- j , -.-..;C-«.
Г 1
| Авторское свидетельство СССР № 1322821, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
