Изобретение относится к авиационной технике и предназначено для автоматической посадки планирующих парашютных систем.
Известны способы для вывода самолета на заданную посадочную траекторию, представляющую линию пересечения плоскости посадочного курса и глиссады снижения, и стабилизация на ней [1] .
В этих способах формируют сигналы, характеризующие отклонение траектории полета самолета от заданной радиосредствами глиссады снижения, и управляют движением самолета таким образом, чтобы отклонение от глиссады было минимальным. Известны навигационные устройства для управления движением самолета по глиссаде [1] .
Эти устройства содержат наземные курсовые и глиссадные радиомаяки, бортовые курсовые и глиссадные радиоприемники и автопилоты. Способ управления движением по глиссаде эффективен для летательных аппаратов, имеющих двигатель, или высокое аэродинамическое качество, что обеспечивает возможность пологого захода на посадку. При крутом спуске, характерном для парашютных систем, угол наклона траектории к горизонту может существенно меняться при изменении горизонтальной составляющей ветра. Поэтому рассматриваемый способ, предназначенный для управления посадкой по глиссаде, не обеспечивает посадки парашютных систем с необходимой точностью. Кроме того, формирование радиоглиссад осуществляется с помощью сложной радиоаппаратуры.
Наиболее близким из известных технических решений является способ управления летательным аппаратом [2] .
При этом способе управления движением планирующей парашютной системы при наведении на радиомаяк стабилизирует полет в направлении передатчика в зоне радиовидимости и выполняют поворот для полета в обратном направлении после прохода зоны радиомолчания маяка. Способ реализуется с помощью навигационной системы, содержащей наземный передатчик, приемник, установленный на летательном аппарате, систему из двух антенн и автопилот [2] .
Недостатком данного способа и устройства является недостаточная точность наведения планирующей парашютной системы на радиомаяк.
Целью изобретения является повышение точности наведения.
Цель достигается тем, что в способе наведения на радиомаяк, основанном на управлении углом курса, отсчитываемого от плоскости радиомаяк-парашютная система, до первого достижения границы конуса радиомолчания маяка вне конуса радиомолчания стабилизирует полет на маяк, а внутри конуса радиомолчания осуществляют полет с нулевыми отклонениями строп управления, после первого достижения границы конуса радиомолчания стабилизируют курс в 35-50о вне конуса радиомолчания, а внутри конуса радиомолчания осуществляют разворот до выхода конуса радиомолчания.
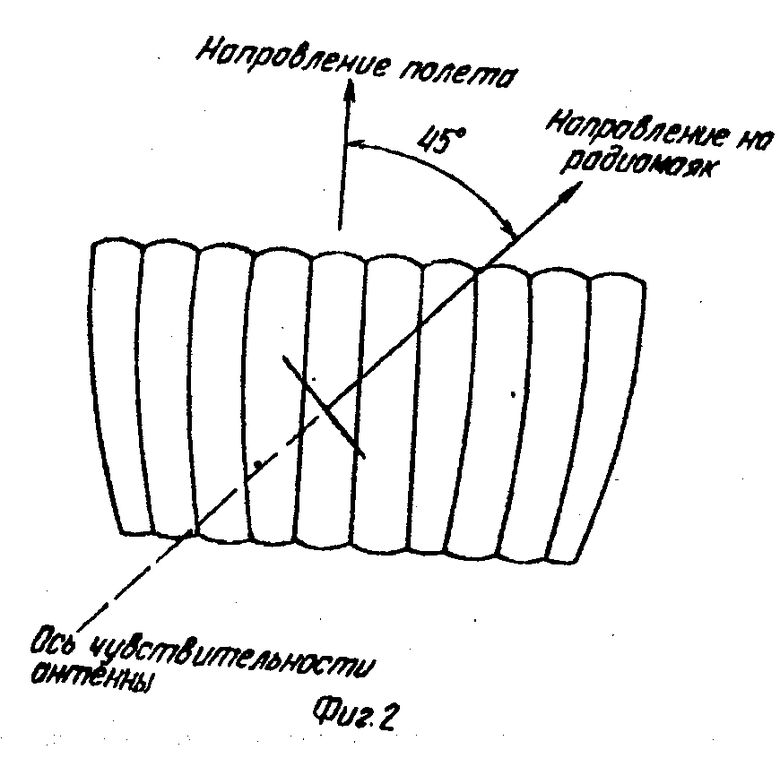
Цель достигается также тем, что в устройстве наведения планирующей парашютной системы на радиомаяк, содержащем наземный радиомаяк, направленную бортовую антенну, приемник, вычислительное устройство, ось чувствительности направленной бортовой антенны расположена под углом 35-50о к плоскости вертикальной симметрии планирующего парашюта.
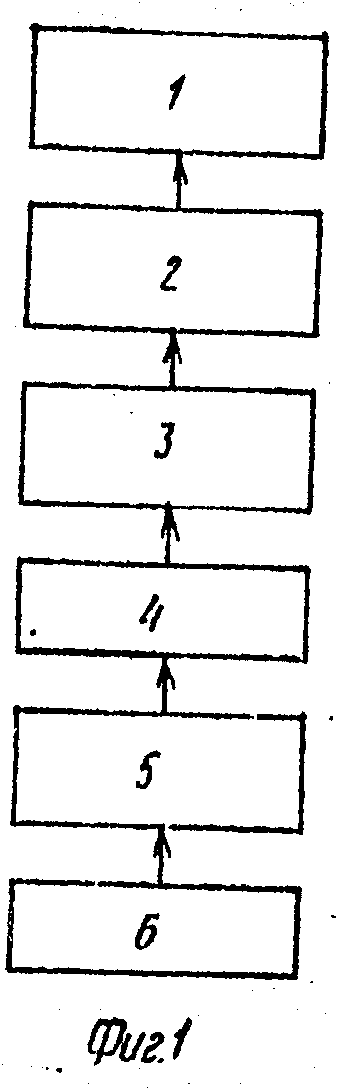
На фиг. 1 представлена схема устройства наведения УППС на наземный радиомаяк; на фиг. 2 представлена схема расположения направленной антенны относительно оси симметрии планирующего парашюта.
Представленные траектории получены при численном моделировании управляемой посадки. При расчетах принималось, что горизонтальная составляющая ветра W = 5 м/с и направлена вдоль оси Х. Устройство наведения содержит планирующий парашют 1, приводы 2 строп, вычислительное устройство 3, приемник 4, направленную антенну 5, радиомаяк 6.
Устройство наведения работает следующим образом. Напpавленная антенна 5 принимает сигналы от радиомаяка 6 и передает их в приемник 4. Сигналы с приемника 4 передаются в вычислительное устройство 3, которое определяет необходимый режим полета и подает необходимые сигналы на приводы 2 строп.
Способ может быть реализован следующим образом.
Полет до границы конуса радиомолчания вначале происходит внутри него или снаружи в зависимости от точки сброса КППС. Если точка сброса была внутри конуса радиомолчания, то полет до границы конуса проводится с нулевыми отклонениями приводов 2 строп. При сбросе вне конуса радиомолчания полет до границы конуса проводят со стабилизацией курса на радиомаяк 6.
Полет после первого достижения границы конуса радиомолчания проводят в двух режимах. В первом стабилизируют курс в 35-50о относительно направления на радиомаяк 6. Этот режим полета осуществляют до достижения границы конуса радиомолчания. Внутри конуса подают команду на кратчайший разворот до выхода из конуса радиомолчания радиомаяка 6 до достижения угла места ниже порогового. Режимы движения задают вычислительным устройством 3 в зависимости от сигналов, принимаемых направленной бортовой антенной 5.
Ось чувствительности антенны располагают под углом 35-50о к плоскости вертикальной симметрии парашюта, чтобы реализовался полет вокруг конуса радиомолчания. Это позволяет получить точность наведения выше, чем с помощью способа и устройства, принятого за прототип. При осуществлении посадки с помощью способа и устройства, принятого за прототип, полет конуса наведения идет в радиальном направлении с последующим разворотом для полета в противоположном направлении. Проведенное численное статического моделирование автоматической посадки для определенного типа парашюта показало, что в безветрии с помощью устройства, принятого за прототип, точность посадки определяется кругом радиусом 160 м. С помощью предлагаемого способа и устройства в тех же условиях разброс точки посадки определяется кольцом с внутренним радиусом 50 м и внешним - 80 м. Выигрыш в точности в 1,5-2 раза сохраняется и при приемлемых для автоматической посадки ветровых возмущений.
Расчеты показали также оптимальность выбора угла в 35-50о, под которым должна располагаться ось чувствительности антенны относительно плоскости вертикальной симметрии парашюта. Если угол меньше 35о или больше 50о, то точность наведения парашютной системы падает, так как увеличивается длительность внутреннего или внешнего разворотов. (56) 1. Белгородский С. Л. Автоматизация управления посадкой самолета, М. , 1972, с. 45-68, 90-101.
2. Заявка Великобритании N 2165963, кл. G 05 D 1/02, 1986.
Изобретение относится к авиационной технике и предназначено для организации автоматической доставки грузов в заданную область с помощью планирующих парашютных систем. Цель изобретения - повышение точности наведения. Сущность способа и устройства заключается в том, что для повышения точности наведения ось чувствительности направленной бортовой антенны располагают под углом 35 - 50к плоскости симметрии планирующего парашюта и управляют движением парашюта таким образом, чтобы реализовался полет вокруг конуса радиомолчания наземного радиомаяка. Применение изобретения позволит осуществлять автоматическую посадку планирующих парашютных систем в условиях ветровых возмущений с достаточной точностью. 2 с. п. ф-лы, 2 ил.

