Изобретение относится к оборудованию для текстильной и кожевенной промышленности, а именно к устройствам для обнаружения металлических частиц в движущихся материалах, в нетканых и потоках различных волокнистых материалов.
Известно устройство для обнаружения металлических частиц в движущихся материалах, содержащее отметчик местонахождения частиц, подключенный к блоку управления, два датчика обнаружения частиц, первый из которых установлен перпендикулярно к направлению перемещения материала, и вычислительный блок [1]
Недостатком известного устройства является то, что для указания месторасположения частиц по ширине материала затрачивается относительно много времени, так как после выдачи сигналов первым датчиком движение материала останавливается, приходит в движение отметчик, жестко связанный со вторым датчиком обнаружения, который обнаруживает месторасположение частиц по ширине и дает команду на отметку, т. е. производительность обнаружения недостаточно высока.
Известно также устройство для обнаружения металлических частиц в движущемся материале [2] содержащее многопозиционный исполнительный орган, подключенный к блоку управления, два датчика обнаружения частиц, расположенных поперек движения материала и разнесенных относительно друг друга в направлении движения материала, причем первый датчик расположен под углом к направлению движения материала, импульсный датчик перемещения материала, сдвигающий регистр, выходы которого подключены к блоку управления, а входы сдвигающего регистра подключены соответственно к выходам импульсного датчика перемещения материала и первого датчика обнаружения частиц, при этом выход второго датчика обнаружения подключен ко вторым входам конъюнкторов. Данное устройство более производительно, так как нанесение меток осуществляется без останова движения материала, и оно принято за прототип.
Но оно имеет следующие недостатки. Чтобы эффективно удалять металлические частицы без потери производительности необходимо вместо многопозиционного отметчика поставить многопозиционный исполнительный орган удаления (например, многопозиционный вырубной микропресс), но вблизи зоны обнаружения такой исполнительный орган установить невозможно из-за влияния на работу датчиков обнаружения. Другой путь отнести зону удаления на определенное расстояние и там установить многопозиционный исполнительный орган удаления, при этом каждая позиция должна иметь датчик обнаружения метки, то есть в этом случае должно происходить двойное обнаружение координат расположения частиц. При этом нанесение меток из-за Физико-химических свойств наносимого вещества (например, магнитных чернил, как наиболее разработанных и простых при распознавании) и движение самого материала не дают 100% качества получаемых меток, как источника информации. Кроме того, для формирования метки, как источника информации требуется определенное время (время "высыхания"), что требует еще большего отнесения зоны удаления от зоны обнаружения. Если для меток используются магнитные чернила, то датчик обнаружения меток будет воспринимать магнитное поле метки и при соответствующем расположении частицы магнитное поле самой частицы, отчего управляющая информация о координате частицы будет искажена: в одном случае усилена, в другом случае занижена, то есть надежность управляющей информации является недостаточной.
Предлагаемое изобретение решает задачу повышения надежности управляющей информации о координатах месторасположения частиц, исключения двойного обнаружения координат и расширения функциональных возможностей устройства за счет автоматизации удаления частиц при разнесенных зонах обнаружения и удаления.
Задача достигается тем, что в устройство, содержащее два датчика обнаружения, импульсный датчик перемещения материала, сдвигающий регистр, коньюнкторы и многопозиционный исполнительный орган, подключенный к блоку управления, а выходы регистра подключены к конъюнкторам, вторые входы которых связаны с выходом второго датчика обнаружения частиц, а входы сдвигающего регистра связаны соответственно с выходом первого датчика обнаружения и первым выходом импульсного датчика перемещения, введен блок запоминания и перемещения координат расположения частиц, включенный между выходами конъюнкторов и входами блока управления, второй, третий, четвертый и пятый входы упомянутого блока связаны соответственно с выходом второго датчика обнаружения частиц и вторым, третьим выходами импульсного датчика перемещения материала, а шестой вход блока является установочным. Блок запоминания и перемещения координат расположения частиц содержит два счетчика, запоминающее устройство и два регистра, при этом первый вход блока связан с информационными входами первого регистра, а выход блока связан с информационными выходами второго регистра, информационные входы которого подключены к входам/выходам данных запоминающего устройства и выходам первого регистра, первый управляющий вход которого подключен ко второму входу блока, третий вход которого связан со счетными входами счетчиков, четвертый вход с управляющим входом второго счетчика, с управляющим входом второго регистра и управляющим входом "ЧТЕНИЕ" запоминающего устройства, а пятый вход связан с управляющим входом первого счетчика, вторым управляющим входом первого регистра и управляющим входом "ЗАПИСЬ" запоминающего устройства, адресные входы которого параллельно подключены к выходам счетчиков, противоположно установочные входы которых объединены и связаны с шестым входом блока.
На фиг. 1 показана блок-схема устройства для обнаружения и удаления металлических частиц в движущемся материале; на фиг.2 функциональная электрическая схема блока запоминания и перемещения координат расположения частиц; на фиг.3 временная диаграмма работы.
Устройство содержит датчики 1 и 2 обнаружения частиц, расположенные поперек движущегося материала 3, многопозиционный исполнительный орган 4 с позициями 5.1. 5. n, импульсный датчик перемещения материала 6, конъюнкторы 7.1. 7.n, сдвигающий регистр 8, входы которого подключены к выходу первого датчика обнаружения частиц 1 и первому выходу 6.1 импульсного датчика перемещения материала 6, а выходы через конъюнкторы 7.1.7.n связаны с первым входом 9.1 блока запоминания и перемещения координат расположения частиц 9, при этом вторые входы коньюнкторов связаны с выходом второго датчика обнаружения частиц 2 и вторым входом 9.2 блока запоминания и перемещения координат расположения частиц 9, третий вход которого 9.3 связан с первым выходом датчика 6, а выход блока 9.7 через блок управления 10 подключен к соответствующим входам 1 n многопозиционного исполнительного органа 4. Входы 9.4 и 9.5 блока 9 подключены ко второму и третьему выходам датчика перемещения 6 (выходы 6.2 и 6.3), а вход 9.6 блока 9 является установочным. Первый датчик обнаружения частиц 1 установлен под углом α 45o, максимальное удаление между датчиками 1 и 2 равно А, размер датчика 2 равен В, а расстояние между зоной обнаружения координат расположения частиц (датчик 2) и зоной удаления равно С. Датчик 6 перемещения материала связан кинематически с механизмом перемещения материала и формирует шаговые импульсы через d единиц по длине материала, причем внутри шага Формируется еще два импульса с выходов 6.2 и 6.3. Оптимальное количество координат "n" нахождения частиц по ширине, материала выбрано из условия:
Количество координат "n" (зон обнаружения по ширине) однозначно соответствует количеству выходов сдвигающего регистра 8.1.8.n. количеству коньюнкторов 7.1. 7. n и количеству позиций 5.1. 5.n исполнительного органа 4. Расстояние между зонами обнаружения и удаления "а", выраженное в шаговых импульсах с датчика 6, будет равно:
a=c/d
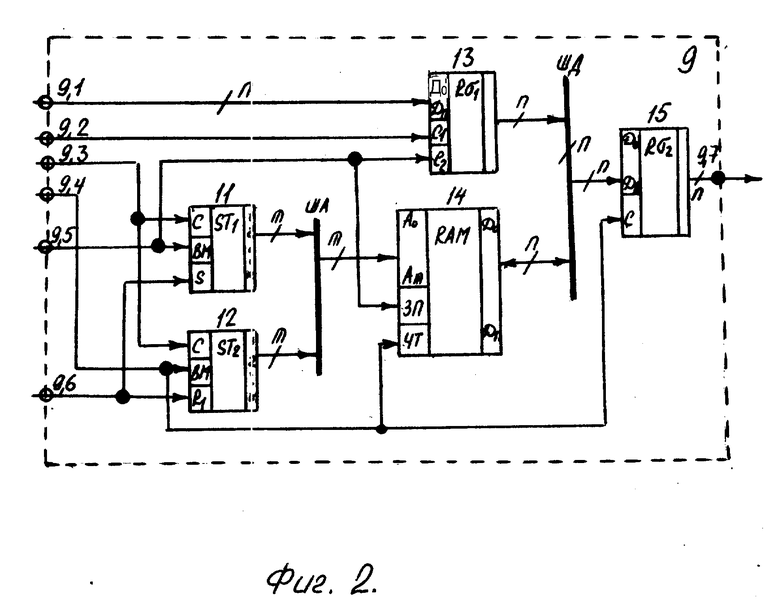
Блок запоминания и перемещения координат расположения частиц по ширине 9 содержит (фиг. 2) два счетчика 11 и 12, запоминающее устройство 14 и два регистра 13 и 15. Вход блока 9.1 связан с информационными входами Do Dn регистра 13, а управляющий вход С1 связан со входом 9.2 блока 9. Информационные выходы регистра 13 связаны с информационными входами/выходами запоминающего устройства 14 и информационным входом второго регистра 15. Такое подключение элементов 13, 14 и 15 обеспечивается выбором этих элементов, имеющих на своих входах/выходах буфера с тремя состояниями. Вход 9.3 блока 9 связан со счетным входом "С" счетчиков 11 и 12, вход 9.4 подключен к управляющему входу BM счетчика 12, управляющему входу "ЧТЕНИЕ" запоминающего устройства 14 и управляющему входу регистра 15, а вход 9.5 блока 9 подключен к управляющему входу счетчика 11, второму управляющему входу первого регистра 13 и управляющему входу "ЗАПИСЬ" запоминающего устройства 14, адресные входы которого (Ao. Am) связаны с выходами счетчиков 11 и 12. Вход 9.6 блока 9 связан со входом S (установка единиц) счетчика 11 и со входом R (установка нулей) счетчика 12. Счетчики 11 и 12 являются двоичными суммирующими счетчиками с одинаковым количеством выходов m. Информация на этих выходах появляется только при наличии управляющих импульсов на входах BM счетчиков.
В исходном состоянии сигналом УСТ сдвигающий регистр 8 устанавливается в нулевое состояние, счетчик 11 в блоке 9 в единичное состояние (все разряды в единичном состоянии), а счетчик 2 в блоке 9 в нулевое состояние.
Устройство работает следующим образом. Включается в работу механизм перемещения материала, отчего с датчика перемещения 6 начинают поступать шаговые импульсы, причем на каждом из трех выходов 6.1, 6.2 и 6.3 они сдвинуты один относительно другого на одинаковые расстояния (фиг. 3). При попадании металлической частицы в зону действия первого датчика обнаружения 1 на его выходе Формируется сигнал Dоб1 (фиг. 3), который установит первый разряд сдвигающего регистра 8 в единичное состояние, следующий сигнал с выхода 6.1 датчика перемещения сдвинет эту единицу во второй разряд регистра 8, а очередной сигнал в третий разряд и т.д.
При попадании металлической частицы в зону действия датчика 2 последний формирует на выходе сигнал Dоб2 (Фиг. 3) и перепишет информацию с выходов регистра 8 через коньюнкторы 7.1.7.n в первый регистр 13 блока 9. Эта информация сигналом с выхода 6.3 датчика перемещения перепишется из регистра 13 в запоминающее устройство 14 по адресу, зафиксированному на выходе счетчика 11. Перед этим сигналом с выхода 6.2 датчика 6 происходит чтение информации из запоминающего устройства 14 в регистр 15 по адресу, зафиксированному счетчиком 12. Но так как в памяти 14 ничего не было записано, то в регистре 15 запишется нулевая информация. Емкость счетчиков одинакова и составляет "а" единиц, равная расстоянию от датчика обнаружения до многопозиционного исполнительного органа удаления 4. Но так как исходное состояние их было противоположным, то формируемые на их выходах адреса будут отличаться на "a" единиц. Поэтому через "a" шагов металлическая частица окажется в зоне действия исполнительного органа, а сигналом с выхода 6.1 датчика 6 счетчика 12 установится в состояние, равное адресу счетчика 11, по которому ранее в память 14 была записана информация о координате расположения частицы по ширине. При этом количество выходов счетчиков "m" связано с числом "а" следующей зависимостью:
m=log2a
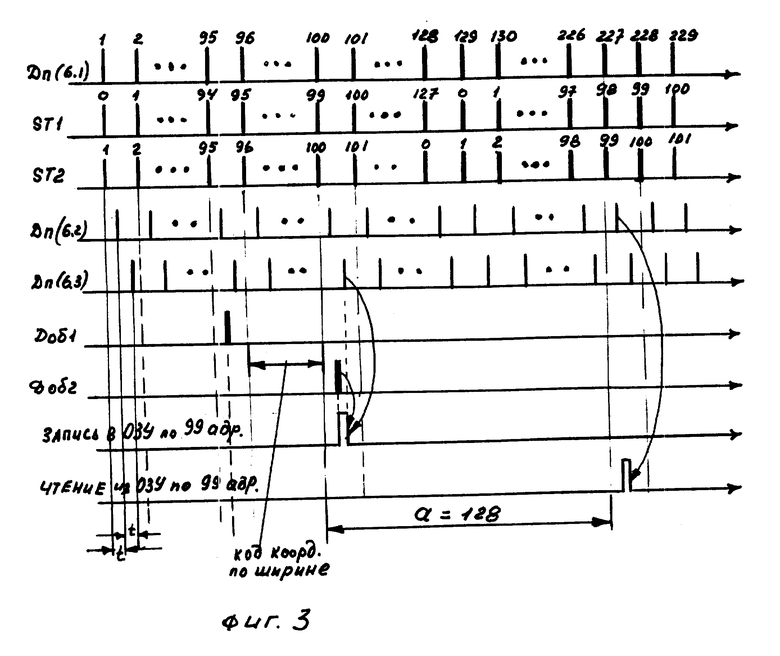
Сигналом с выхода 6.3 датчика 6 адрес со счетчика 12 поступит на адресные входы памяти 14, сформируется сигнал "ЧТЕНИЕ" и по этому адресу в регистр 15 из памяти 14 перепишется координата нахождения частицы по ширине материала. В блоке управления 10 сформируется сигнал управления на одной или нескольких из выходных шин 1. n, отчего сработает одна или несколько из позиций 5.1. 5n исполнительного органа 4 и, таким образом, одна или несколько частиц будут удалены. На фиг.3 приведена временная диаграмма работы устройства для числа a=128, при этом двоичное представление его:
m=log2a=7
т.е. количество разрядов двоичных счетчиков 11 и 12 равно 7.
На диаграмме показано, как изменяются адреса на счетчике ST1 и ST2 (11 и 12), а также срабатывание первого датчика обнаружения Dоб1 на интервале между 9.5 и 9.6 шаговыми импульсами с датчика перемещения 6, а второго датчика обнаружения Dоб2 между сотым и сто первым шаговыми импульсами. По 99 адресу запоминающего устройства будет записан код координат расположения частиц по ширине, а считывание этого кода произойдет через 128 шагов по тому же 99 адресу, т. е. произойдет перемещение кода координаты по ширине из зоны обнаружения в зону удаления.
Введение блока запоминания и перемещения координат расположения частиц по ширине в виде двух счетчиков, работающих со смещением адресов на величину транспортного запаздывания, и запоминающего устройства, откуда непосредственно считывается информация на многопозиционный исполнительный орган удаления частиц, исключает двойное обнаружение координат нахождения частиц, позволяет автоматизировать процесс удаления частиц, а компактная упаковка информации о координатах в запоминающем устройстве повышает надежность и достоверность получения управляющей информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ И УДАЛЕНИЯ МЕТАЛЛИЧЕСКИХ ЧАСТИЦ В ДВИЖУЩЕМСЯ МАТЕРИАЛЕ | 2001 |
|
RU2180373C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕТАЛЛИЧЕСКИХ ЧАСТИЦ В ДВИЖУЩЕМСЯ МАТЕРИАЛЕ | 1999 |
|
RU2147327C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕТАЛЛИЧЕСКИХ ЧАСТИЦ В ДВИЖУЩЕМСЯ МАТЕРИАЛЕ | 1997 |
|
RU2119985C1 |
| СПОСОБ УПРАВЛЕНИЯ КЛЕЙМЕНИЕМ ПЛОЩАДИ КОЖ | 1997 |
|
RU2124561C1 |
| СПОСОБ УПРАВЛЕНИЯ КЛЕЙМЕНИЕМ ПЛОЩАДИ КОЖ | 1995 |
|
RU2100439C1 |
| Устройство для обнаружения металлических частиц в движущемся материале | 1978 |
|
SU767254A1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУППОВЫМ ВОЖДЕНИЕМ МАШИН | 1999 |
|
RU2172085C2 |
| СПОСОБ УПРАВЛЕНИЯ КЛЕЙМЕНИЕМ ПЛОЩАДИ КОЖ | 2001 |
|
RU2205225C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ КРАСКОРАСПЫЛИТЕЛЕМ | 2002 |
|
RU2225634C1 |
| ЭЛЕКТРОННЫЙ ЦВЕТОКОРРЕКТОР | 1989 |
|
RU2033702C1 |
Устройство содержит многопозиционный исполнительный орган, подключенный к блоку управления и расположенный в зоне удаления металлических частиц, два датчика обнаружения, расположенных поперек движения материала и разнесенных относительно друг друга в направлении движения материала, импульсный датчик перемещения материала, сдвигающий регистр, конъюнкторы и блок запоминания и перемещения координат расположения частиц. Входы сдвигающего регистра подключены к первому датчику обнаружения и первому выходу датчика перемещения, а выходы сдвигающего регистра через коньюнкторы и блок запоминания и перемещения координат расположения частиц подключены ко входам блока управления. Второй датчик обнаружения подключен ко вторым входам конъюнкторов, ко второму входу блока запоминания и перемещения координат расположения частиц, третий, четвертый, пятый входы которого связаны с первым, вторым и третьим выходам датчика перемещения. 1 з.п. ф-лы, 3 ил.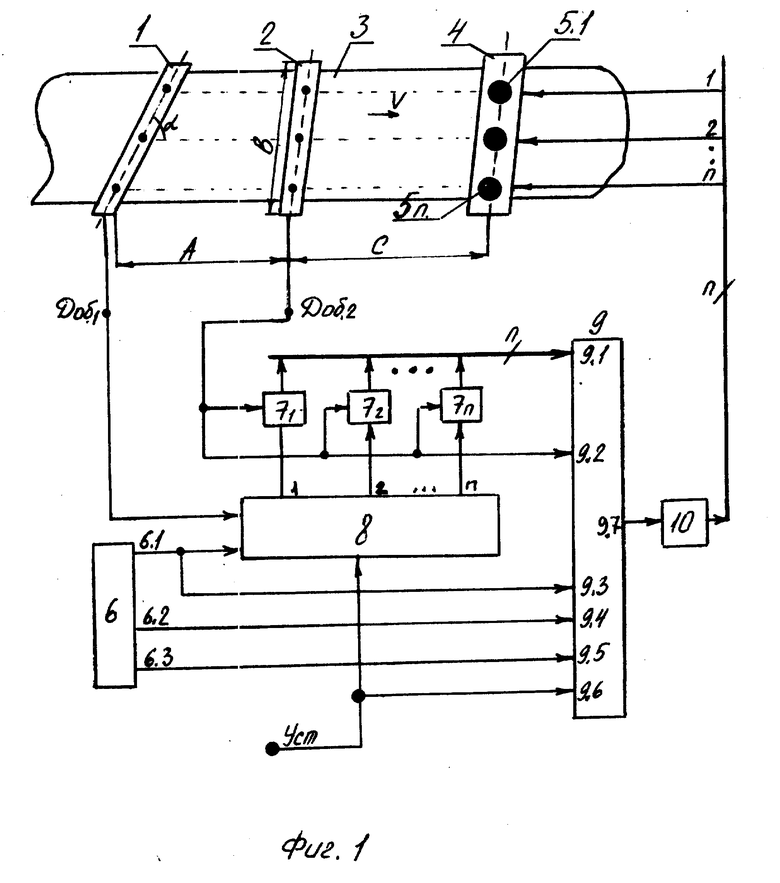
| DE, патент, 957384, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| SU, авторское свидетельство, 767254, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
