Способ управления групповым вождением машин относится к области автоматизации процессов совместной работы движущихся друг за другом машин и может быть использован для ориентации движения двух транспортных средств, в частности при совместной работе скрепера и толкача.
Известны способы для группового управления вождением самоходных сельскохозяйственных машин, например описанный в SU А.С. N 743612 от 30.06.80, включающий ведущую и ведомые машины, заключающийся в том, что ведущая машина излучает электромагнитные волны через радиопередатчик и излучатель, а ведомая принимает их через антенны и приемники, преобразовывает в соотношение амплитуд, обрабатывает, формирует сигналы коррекции, преобразовывает их в текущие координаты исполнительных органов. Излучение и прием электромагнитных волн осуществляют в двух взаимно перпендикулярных направлениях с помощью вибраторов.
Недостатками описанного способа являются: наличие "мертвых" зон, не возможность вхождения машин в синхронизм в исходном положении машин, сложность системы управления и сложность ее обслуживания в реальных по левых условиях.
Более надежным в управлении известен способ, реализация которого описана в SU А.С. N 835319 и который заключается в том, что ведущая и ведомая машины излучают сигналы в виде электромагнитных волн через радиопередатчик и излучатель, а принимают через антенны приемников с вибраторами, преобразовывают сигналы в соотношение амплитуд, обрабатывают, дополнительно интегрируют, формируют сигналы коррекции и преобразовывают их в текущие координаты исполнительных органов. Этот способ принят за прототип.
Он имеет следующие недостатки:
1. реализация данного способа включает множество сложных операций, для выполнения которых требуются радиоприемники и радиопередатчики, смесители, гетеродин, фильтры, фазоизмерительные и сравнивающие устройства, интеграторы, коммутаторы и вычислители, что делает данный способ достаточно сложным и дорогим.
2. система, описанная в данном способе, осуществляет управление только скоростью движения группы самоходных машин и не учитывает их поперечное движение. Кроме того, способ не позволяет осуществлять синхронное сближение и стыковку, т.е. его функциональные возможности управления ограничены.
Задача, решаемая изобретением, - упрощение процесса управления при сближении и стыковке машин, расширение функциональных возможностей управления в полевых условиях и сокращение времени стыковки.
Это достигается тем, что в способе управления групповым вождением машин, заключающемся в том, что ведущая машина излучает сигнал, а ведомая принимает сигнал, ведущая машина излучает постоянный визуальный сигнал о скорости и переменный визуальный и звуковой сигнал о положении ведомой машины относительно линии симметрии ведущей машины через соответствующие элементы индикации, которые располагают на задней стенке ковша ведущей машины, при этом ведомая машина по визуальному сигналу о скорости ведущей машины изменяет свою скорость, а по переменному визуальному и звуковому сигналу ведущей машины ориентирует свое движение в направлении, перпендикулярном основному движению ведущей машины, причем ведущая машина переменный визуальный и звуковой сигналы формирует путем логической обработки сигналов с датчиков соприкосновения, которые располагают в теле его буфера, от момента начального соприкосновения ведомой машины с буфером ведущей машины до их полного соприкосновения. Постоянный визуальный сигнал о скорости ведущей машины формируют путем заполнения нечетных промежутков между импульсами, снимаемыми с датчика оборотов тросика спидометра, импульсами высокой частоты, их подсчета и преобразования в значение скорости в четных промежутках между первыми упомянутыми импульсами, запоминания и отображения на соответствующих индикаторах, при этом преобразование подсчитанного количества импульсов высокой частоты в значение скорости осуществляют в соответствии с выражением
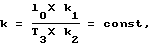
где V - скорость в км/ч,
n - количество подсчитанных импульсов высокой частоты с периодом T3,
l0 - цена в линейных размерах одного импульса с датчика оборотов тросика спидометра,
k1 и k2 - соответственно коэффициенты перевода линейных размеров l0 в километры и временного интервала T3 в часы.
Логическую обработку сигналов с датчиков соприкосновения осуществляют путем оценки наличия сигналов от каждой группы рядом стоящих датчиков соприкосновения и включения соответствующего индикатора на пульсирующее мигание, а при наличии сигналов от всех групп датчиков соприкосновения переводят индикаторы на постоянное свечение и формируют прерывистый звуковой сигнал на заданное время, после истечения которого звуковой сигнал снимают.
Реализация способа управления групповым вождением машин рассматривается ниже на примере работы системы управления групповым вождением машин скрепер - толкач и поясняется чертежами, приведенными на фиг. 1-7, при этом скрепер выступает в качестве ведущей машины, а толкач - в качестве ведомой машины.
На фиг. 1 - приведена общая схема системы скрепер - толкач, включающая скрепер 1, раму 2, ковш 3, заднюю стенку ковша 4, буфер ковша 5, устройство управления 6, панель управления 7, толкач (бульдозер) 8, толкающие брусья с отвалом 9. датчик движения толкача 10, указатель скорости толкача 11.
На фиг. 2 показан вид сзади на буфер ковша скрепера с датчиками соприкосновения (5.2л - левая группа, 5.2п - правая группа).
На фиг. 3 приведено сечение по А-А фиг. 2, где показана конструкция датчика соприкосновения и его крепление в теле буфера 5.1, где: 5.2 - болт, 5.3 - пружина, 5.4 - гайка, 5.5 - магнитная шайба, 5.6 - кронштейн, 5.7 - магнитоуправляемый контакт (геркон).
На фиг. 4 показан основной вид панели индикации 7 с цифровыми индикаторами скорости скрепера 7.1, с группой левых 7.2 и правых 7.3. индикаторов положения толкача, со звуковым излучателем 7.4 (динамик), установленных на панели 7.5.
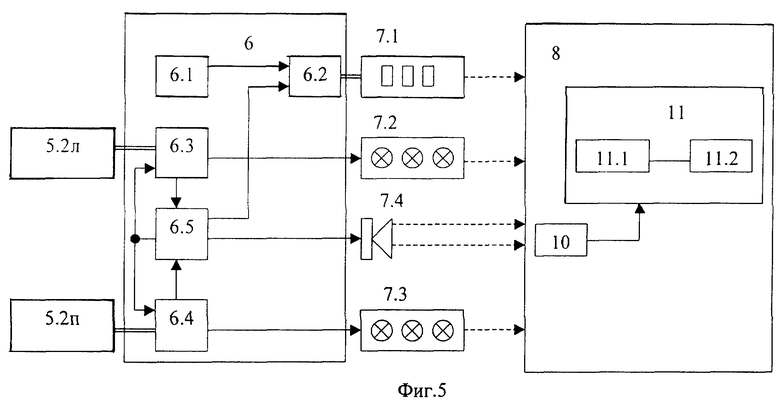
На фиг. 5 приведена блок-схема системы управления ориентировки движения совместно работающих скрепера и толкача (бульдозера), где обозначены:
5.2л, 5.2п - левая и правая группы датчиков соприкосновения,
6.1 - датчик оборотов тросика спидометра скрепера,
6.2 - блок определения скорости скрепера,
6.3; 6.4 - блоки формирования переменного визуального сигнала о положении толкача относительно линии симметрии скрепера,
6.5 - блок формирования переменного звукового сигнала,
10 - датчик движения толкача,
11 - указатель скорости толкача с преобразователем движения в скорость 11.1 и индикатором скорости 11.2.
На фиг. 6 - показана функциональная схема логической обработки сигналов с датчиков соприкосновения и формирования переменного визуального и звукового сигнала. Блок 6.3 формирования переменного визуального сигнала от левой группы датчиков соприкосновения содержит три схемы совпадения на три входа, подключенных к трем группам по три датчика соприкосновения 5.2л, и три схемы совпадения на два входа, первыми входами связанными с входами соответствующих схем совпадения, вторыми - с управляющим входом блока, а выходами через усилители с левой группой индикаторов положения толкача. Аналогично построен блок 6.4 формирования переменного визуального сигнала от правой группы датчиков соприкосновения. Блок 6.5 формирования переменного звукового сигнала содержит шестивходовую схему И-НЕ, входами связанную с выходами блоков 6.3 и 6.4, двухвходовую схему И-НЕ, входами связанную с выходами предыдущей схемой И-НЕ и первым выходом f1 генератора импульсов G, а выходом с управляющим входом блоков 6.3 и 6.4.
Блок 6.5 также содержит триггер, связанный первым входом через формирователь F, а вторым входом через линию задержки ЛЗ и формирователь F с выходом упомянутой шестивходовой схемы И-НЕ, причем выход триггера через трехвходовую схему И и усилитель У связан со звукоизлучателем 7.4, а второй и третий входы трехвходовой схемы И подключены соответственно к первому и второму выходам генератора импульсов G, третий выход которого f3 связан с блоком 6.2.
На фиг. 7 приведена функциональная схема блока определения скорости скрепера, где обозначены:
Тсч - одноразрядный двоичный счетчик, схема совпадения &, делитель Д, двоичный счетчик ST, преобразователь кода скорости в численное значение скорости с запоминанием P, одновибраторы F1 и F2,
f0(T0) - частота (период) импульсов с датчика оборотов тросика спидометра,
f3(T3) - частота (период) импульсов высокой частоты,
n - количество импульсов высокой частоты, прошедшее за нечетный промежуток между импульсами с частотой f0.
Преобразователь кода P (к/n) в численное значение скорости построен в виде постоянного запоминающего устройства (ПЗУ), на выходе которого подключен регистр, адресными входами ПЗУ являются входы счетчика ST, а сигналом чтения - сигнал с одновибратора F1.
После запоминания численного значения скорости по коду со счетчика ST последний гасится сигналом с одновибратора F2.
Управление вождением машин на примере скрепера с толкачом предлагаемым способом осуществляется следующим образом.
Скрепер 1 (фиг. 1), врезаясь в грунт ковшом 3, излучает постоянный визуальный сигнал о скорости с индикаторов 7.1 индикаторной панели 7. Водитель толкача 8 воспринимает информацию о скорости скрепера, снижает свою скорость, контролируя ее по указателю скорости 11. При начальном соприкосновении отвала 9 с буфером ковша 5 скрепера срабатывает одна или несколько групп, например, левых датчиков соприкосновения 5.2л, которые, преодолевая сопротивление пружины 5.3 (фиг. 2,3), перемещают магнитную шайбу в осевом направлении, отчего замыкается магнитоуправляемый контакт 5.7 соответствующего датчика, срабатывает одна или несколько трехвходовых схем И в блоке 6.3 и соответственно одна или несколько двухвходовых схем. И в этом блоке и соответствующие индикаторные лампы блока 7.2 переходят в режим пульсирующего мигания, управляемые сигналом f1 на входе блока 6.3, т.е. скрепер излучает переменный визуальный сигнал о положении толкача относительно линии симметрии ведущей машины (скрепера). По миганию индикаторных ламп водитель толкача ориентирует его движение в направлении, перпендикулярном основному движению, до момента полного соприкосновения.
Этот момент фиксируется шестивходовой схемой И-НЕ в блоке 6.5 (фиг. 6), и через двухвходовую схему И-НЕ на управляющий вход блоков 6.3 и 6.4 поступает постоянный сигнал, отчего индикаторные лампы переходят на постоянное свечение.
Одновременно через формирователь F срабатывает триггер Т (фиг. 6), отчего открывается трехвходовая схема И-НЕ и на звуковой излучатель поступает смесь двух частот с генератора импульса G (f1 и f2), что вызывает прерывистые звуковые сигналы с излучателя 7.4. Через время, определяемое линией задержки ЛЗ, триггер Т устанавливается в первоначальное положение и работа излучателя 7.4 прекращается. Ведущая машина и ведомая машина начинают работать при полном соприкосновении, при постоянном контроле скорости скрепера по ее визуальной индикации на индикаторном табло.
Постоянный визуальный сигнал о скорости скрепера формируют путем заполнения нечетных промежутков между импульсами (фиг. 7), снимаемых с датчика оборотов тросика спидометра G1, импульсами высокой частоты f3(T3), их подсчета (элементы Tсч, схема И, делитель Д, счетчик ST) и преобразования в значение скорости в четных промежутках между упомянутыми импульсами, запоминания [элементы F1, F2, P(к/n)] и отображения на соответствующих индикаторах. Преобразование подсчитанного количества импульсов высокой частоты в значение скорости осуществляют в соответствии с выражением

где V - скорость в км/ч,
n - количество подсчитанных импульсов высокой частоты с периодом T3,
l0 - цена в линейных размерах одного импульса с датчика оборотов тросика спидометра,
k1 и k2 - соответственно коэффициенты перевода линейных размеров l0 в километры и временного интервала T3 в часы.
В каждом нечетном интервале между импульсами f0 в счетчике ST (фиг. 7) записывают код скорости (величина n/k), а численное значение скорости равно k/n. Поэтому в преобразователе P(k/n) осуществляется обратное преобразование кода n/k путем обращения к таблице, записанной в постоянном запоминающем устройстве ПЗУ, где каждому значению n/k есть соответствующее значение k/n.
За счет того, что ведущая машина дополнительно излучает переменный визуальный и звуковой сигналы о положении ведомой машины относительно линии симметрии ведущей машины через соответствующие элементы индикации, а ведомая машина ориентирует по дополнительно полученным сигналам свое движение в направлении, перпендикулярном основному движению ведущей машины до полного их соприкосновения, сокращается время стыковки, упрощается процесс управления вождением машин и расширяются функциональные возможности управления в полевых условиях.





Способ заключается в том, что ведущая машина излучает сигнал, а ведомая машина принимает сигнал. Ведущая машина излучает постоянный визуальный сигнал о скорости и переменный визуальный сигнал о положении ведомой машины относительно линии симметрии ведущей машины через соответствующие элементы индикации, которые располагают на задней стенке ковша ведущей машины. Ведомая машина по визуальному сигналу о скорости ведущей машины изменяет свою скорость, а по визуальному и звуковому переменному сигналу ведущей машины ориентирует свое движение в направлении, перпендикулярном основному движению ведущей машины. Ведущая машина переменный визуальный и звуковой сигналы формирует путем логической обработки сигналов с датчиков соприкосновения, которые располагают в теле ее буфера, от момента начального соприкосновения ведомой машины с буфером ведущей машины до их полного соприкосновения. Упрощается процесс управления при сближении и стыковке машин, расширяются функциональные возможности управления в полевых условиях и сокращается время стыковки. 2 з.п.ф-лы, 7 ил.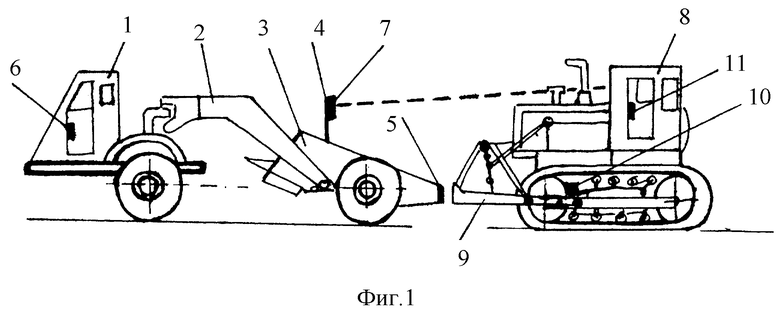

где
где V - скорость, км/ч;
n - количество подсчитанных импульсов высокой частоты с периодом T3;
l0 - цена в линейных размерах одного импульса с датчика оборотов тросика спидометра;
k1 и k2 - соответственно коэффициенты перевода линейных размеров l0 в километры и временного интервала T3 в часы.
| Система для автоматического управленияСКОРОСТью дВижЕНия гРуппы САМОХОдНыХМАшиН | 1979 |
|
SU835319A1 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1978 |
|
SU743612A1 |
| Индукционное устройство для групповогоВОждЕНия ТРАКТОРНыХ АгРЕгАТОВ | 1979 |
|
SU835320A1 |
| Система группового управления самоходными агрегатами | 1978 |
|
SU880284A1 |
