Способ относится к области машиностроения для легкой промышленности и может быть использован при обнаружении металлических частиц, например обломков игл, в нетканой основе при производстве синтетической кожи, фетра и т.д.
Известен способ обнаружения металлических частиц в движущемся материале с помощью двух датчиков обнаружения: неподвижного и подвижного, перемещающегося под углом 90o относительно направления движения полотна. При перемещении материала через зону работы неподвижного датчика фиксируют наличие металлической частицы и определяют ее координату по длине полотна [1]. Когда участок полотна с расположенной в нем частицей оказывается в зоне работы подвижного датчика, механизм перемещения полотна выключают и перемещают датчик поперек материала, определяют координату металлической частицы по ширине материала, наносят метку и возобновляют перемещение материала. Однако этот способ имеет следующие недостатки:
1) низкую производительность вследствие частых остановов;
2) быстрый износ оборудования за счет стоп-стартного принципа работы технологического комплекса.
Наиболее близким по технической сущности к заявленному является способ обнаружения металлических частиц в движущемся материале [2] с помощью двух неподвижных датчиков обнаружения, установленных соответственно под углом 45o и под углом 90o относительно направления движения полотна. Материал последовательно перемещают через зону работы двух датчиков обнаружения и зону нанесения метки, информацию о наличии металлической частицы в полотне принимают с первого датчика обнаружения, фиксируют момент приема, запоминают эту информацию в виде единичного импульса и перемещают его по сдвигающему регистру синхронно с перемещением материала посредством шаговых импульсов с датчика перемещения. Принимают информацию о наличии металлической частицы с второго датчика обнаружения и фиксируют момент приема. Путем сравнения информации, полученной с первого датчика обнаружения, и информации, полученной с второго датчика обнаружения, определяют координату расположения металлической частицы в полотне. С блока управления формируют управляющую информацию для нанесения метки.
Этот способ является более производительным и более надежным по сравнению с указанным выше вследствие большей долговечности оборудования, однако он обладает рядом недостатков. Во-первых, очередность появления сигналов, соответствующих частицам с первого датчика обнаружения, во многих случаях не совпадает с очередностью появления сигналов о тех же частицах с второго датчика обнаружения, что приводит к формированию ложных координат расположения частиц по ширине и длине материала. Во-вторых, информация в регистре после каждого считывания не уничтожается, что влечет искажение информации при очередном считывании, ее избыточность, отчего снижается достоверность формирования координат расположения частиц по ширине материала. Например, если две частицы расположены рядом по ходу движения материала, то есть в соседних координатах по длине, но имеющих одну координату по ширине (например, в координате 4), то первый датчик обнаружения выдаст два сигнала подряд, а затем второй датчик обнаружения через 4 и 5 шаговых импульсов с датчика перемещения выдаст тоже два сигнала. В блок управления будут считаны из регистра два кода: 001100... и 000110..., означающие нахождение частиц в одном сечении с координатами 3 и 4, а в другом сечении с координатами 4 и 5. Координаты 3 и 5 - ложные, избыточные.
Заявленное изобретение решает задачу сокращения избыточной и ложной информации и повышения достоверности определения координат расположения частиц в материале.
Это достигается тем, что материал последовательно перемещают через зону работы двух датчиков обнаружения и зону нанесения метки, информацию о наличии металлической частицы в полотне принимают с первого датчика обнаружения, фиксируют момент приема, запоминают эту информацию в виде единичного импульса и перемещают его синхронно с перемещением материала посредством шаговых импульсов с датчика перемещения, принимают информацию о наличии металлической частицы в полотне с второго датчика обнаружения и фиксируют момент приема, а с блока управления формируют управляющую информацию для нанесения метки, после приема информации с второго датчика обнаружения ее запоминают в виде единичного импульса и перемещают его синхронно с перемещением материала посредством шаговых импульсов с датчика перемещения, а после прохождения заданного расстояния единичным импульсом с первого датчика обнаружения формируют короткий импульс, которым считывают информацию в блок управления из постоянного запоминающего устройства и запомненную информацию от первого датчика обнаружения и после считывания осуществляют установку в нулевое состояние старших разрядов запомненной информации от первого датчика обнаружения и всех разрядов запомненной информации от второго датчика обнаружения, при этом в качестве младшей части адреса постоянного запоминающего устройства используют запомненную информацию от второго датчика обнаружения, а в качестве старшей части адреса постоянного запоминающего устройства используют запомненную информацию от первого датчика обнаружения. Предварительно в постоянное запоминающее устройство записывают координаты различных вариантов размещения металлических частиц по ширине полотна.
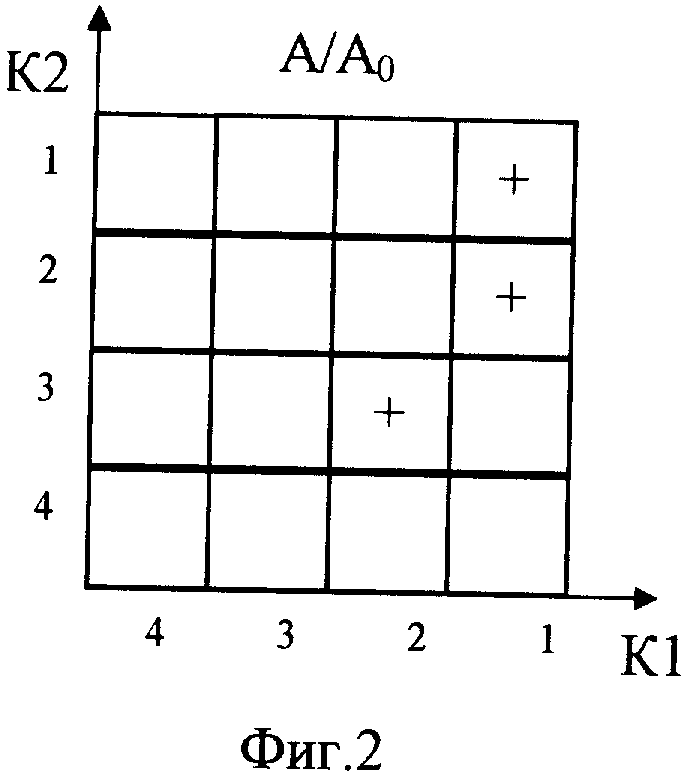
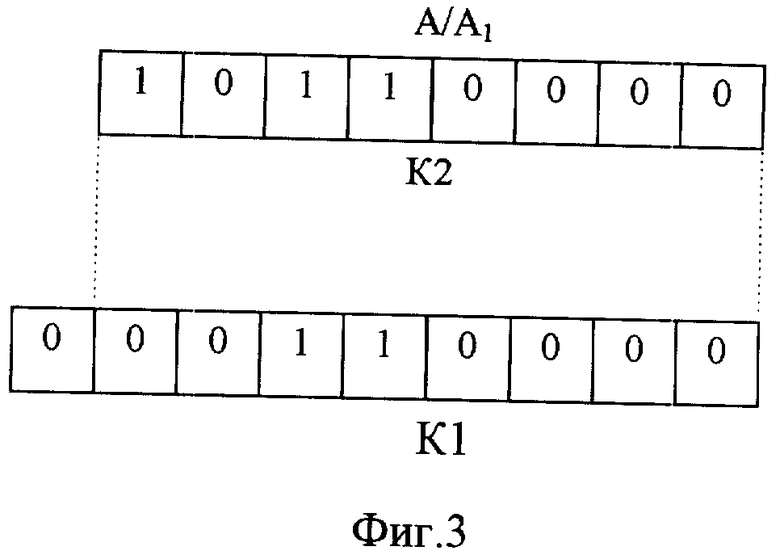
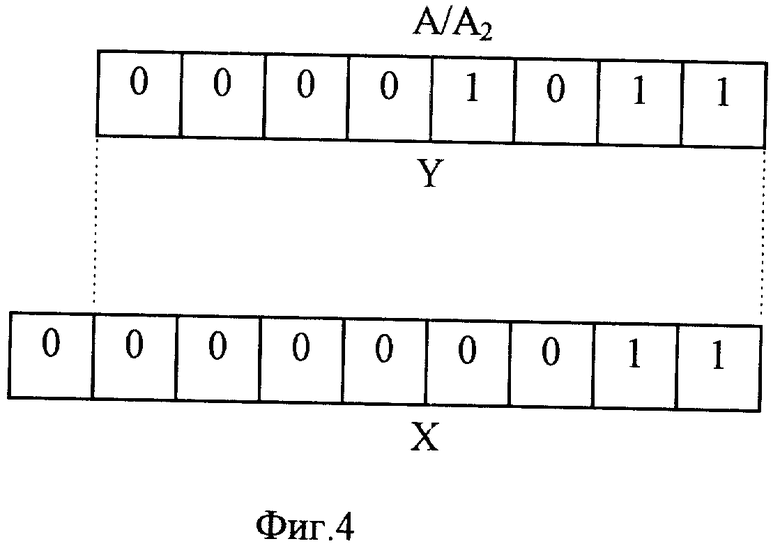
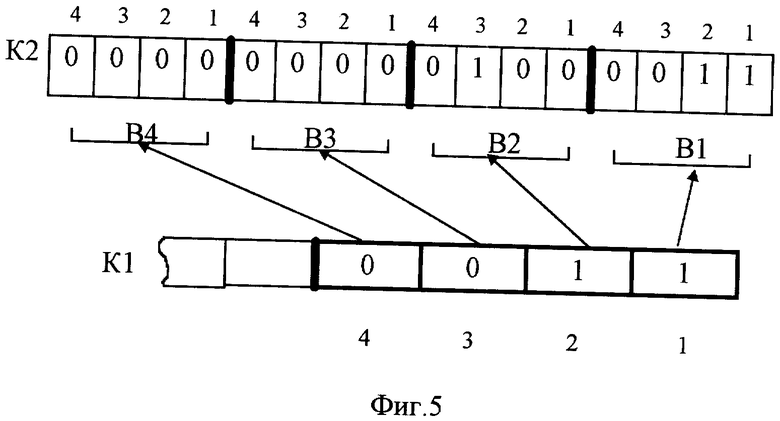
Сущность предлагаемого способа поясняется чертежами. На фиг. 1 показана блок-схема устройства для реализации предлагаемого способа. На фиг. 2 показан участок полотна, представляющий собой квадратную матрицу A размерностью 4х4 виртуальных зон расположения частиц в позиции A0, крестиками показано расположение металлических частиц в материале, K1 - код координаты металлической частицы по длине материала и K2 - код координаты металлической частицы по ширине материала. На фиг. 3 показаны коды координат тех же металлических частиц в регистрах X и Y и (регистр 6 и регистр 5) при расположении матрицы A в позиции A1. На фиг. 4 показаны коды координат тех же металлических частиц в регистрах X и Y при расположении матрицы A в позиции A2. На фиг. 5 показан код, считанный из постоянного запоминающего устройства в блок управления для тех же частиц. А его соответствие горизонтальной и вертикальной координате показано на фиг. 6. На фиг. 7 представлены фрагменты расположения металлических частиц по координатам X и Y для матрицы 4х4 и соответствующие им координаты по ширине и длине материала в десятичной системе.
Способ осуществляется следующим образом. Материал 1 последовательно перемещают через зону работы первого датчика обнаружения 2 и зону работы второго датчика обнаружения 3 и зону работы отметчика 4. При наличии металлической частицы в полотне информацию о ней принимают с датчика обнаружения 2, фиксируют момент приема, запоминают эту информацию в виде единичного импульса в первом разряде сдвигающего регистра 6 и перемещают его по ячейкам регистра 6 синхронно с перемещением материала 1 посредствам шаговых импульсов с датчика перемещения 7. Так как датчики обнаружения отстоят друг от друга на расстояние a, равное по величине одному шаговому импульсу, обнаружение той же металлической частицы вторым датчиком обнаружения начинается с запаздыванием на один шаг, поэтому емкость регистра Y меньше емкости регистра X на один разряд. Далее информацию о наличии металлической частицы принимают с датчика обнаружения 3, запоминают эту информацию в виде единичного импульса в первом разряде сдвигающего регистра 5 и перемещают его по ячейкам регистра 5 синхронно с перемещением материала 1 посредством шаговых импульсов с датчика перемещения 7. Информацию со сдвигающего регистра 5 подают на младшие входы A0...A7 постоянного запоминающего устройства 8, а информацию со сдвигающего регистра 6 подают на старшие входы A8...A11 постоянного запоминающего устройства 8. Информация, поступающая со сдвигающего регистра 6, является кодом координаты металлической частицы по длине материала. Коду каждой координаты металлической частицы по длине соответствует множество координат частиц по ширине для различных вариантов расположения частиц в полотне, которые предварительно записывают в постоянное запоминающее устройство. Постоянное запоминающее устройство 8 представлено в виде двухуровневой памяти. Номер страницы кодируется выходами с регистра 6, а номер ячейки в странице кодируется выходами с регистра 5. В каждой ячейке памяти записан код соответствующей координаты расположения металлической частицы по ширине. При появлении единичного импульса на выходе регистра 6 схемой И 9 формируют короткий единичный импульс с использованием второго выхода с датчика перемещения 7. Этим коротким импульсом считывают информацию из соответствующей ячейки памяти в блок управления 10, который управляет работой отметчика 4. Для конкретного примера описания способа на фиг. 2 показан участок полотна, имеющий квадратную матрицу A размерностью 4х4 виртуальных зон нахождения частиц. При этом K1 - координата по длине, K2 - координата по ширине, крестиками показано расположение металлических частиц. На фиг. 3 показаны коды координат тех же металлических частиц в регистрах X и Y при расположении матрицы A в позиции A1. На фиг. 4 показаны коды координат тех же металлических частиц в регистрах X и Y при расположении матрицы А в позиции A2. В этой позиции происходит чтение информации из постоянного запоминающего устройства. Для тех же частиц считанный из постоянного запоминающего устройства код K2 и считанный с регистра X код K1 представлены на фиг. 5, а их соответствие горизонтальной и вертикальной координатам представлено на фиг. 6. На фиг. 7 представлены фрагменты расположения металлических частиц по координатам X и Y для матрицы 4х4 и коды координат K1 и K2 по длине и ширине материала в десятичной системе. Эти же коды, но в двоичной системе представлены на фиг. 5.
Предварительная запись в постоянное запоминающее устройство той или иной информации из таблицы фиг. 7 происходит стандартными средствами и способами. Например, для частиц, расположенных как показано на фиг. 2, коды координат X и Y указаны в таблице фиг. 7 на строке 23, программирование постоянного запоминающего устройства осуществляется следующим образом: на входах A8...A11 устанавливают код Х, в данном случае 0011, а на входах A0...A7 устанавливают код Y в данном случае 00001011, и записывают информацию по шинам D0...D15 в соответствии со столбцами 5 и 6 таблицы фиг. 7 (двоичный эквивалент этой информации представлен на фиг. 5 как код K2). После считывания осуществляют установку в нулевое состояние с помощью линии задержки 11 старших разрядов регистра 6 и всех разрядов регистра 5.
Предлагаемый способ за счет того, что дополнительно информацию с датчика обнаружения 3 запоминают в виде единичного импульса и перемещают его синхронно с перемещением материала, позволяет получить полную информацию об одноименных частицах с обоих датчиков обнаружения, а обработка этой информации путем перебора и сравнения с заранее записанными в постоянное запоминающее устройство данными по размещению металлических частиц в материале позволяет более достоверно определить координату расположения металлических частиц в полотне, что уменьшает поток избыточной и ложной информации.
Источники информации
1. Патент ФРГ N 957384, НКИ 8 F 3/50, 1957.
2. АС СССР N 767254, МКИ D 06 H 3/14, 1980.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ МЕТАЛЛИЧЕСКИХ ЧАСТИЦ В ДВИЖУЩЕМСЯ МАТЕРИАЛЕ | 1999 |
|
RU2147327C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И УДАЛЕНИЯ МЕТАЛЛИЧЕСКИХ ЧАСТИЦ В ДВИЖУЩЕМСЯ МАТЕРИАЛЕ | 2001 |
|
RU2180373C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И УДАЛЕНИЯ МЕТАЛЛИЧЕСКИХ ЧАСТИЦ В ДВИЖУЩЕМСЯ МАТЕРИАЛЕ | 1996 |
|
RU2100505C1 |
| СПОСОБ УПРАВЛЕНИЯ КЛЕЙМЕНИЕМ ПЛОЩАДИ КОЖ | 1997 |
|
RU2124561C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ КРАСКОРАСПЫЛИТЕЛЕМ | 2002 |
|
RU2225634C1 |
| СПОСОБ УПРАВЛЕНИЯ КЛЕЙМЕНИЕМ ПЛОЩАДИ КОЖ | 1995 |
|
RU2100439C1 |
| Устройство для обнаружения металлических частиц в движущемся материале | 1978 |
|
SU767254A1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕТАЛЛИЧЕСКИХ ЧАСТИЦ В ПЕРЕМЕЩАЕМОМ ВОЛОКНИСТОМ МАТЕРИАЛЕ | 2013 |
|
RU2545496C1 |
| СПОСОБ УПРАВЛЕНИЯ КЛЕЙМЕНИЕМ ПАРАМЕТРОВ ДВИЖУЩИХСЯ КОЖ | 1999 |
|
RU2147036C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕТАЛЛИЧЕСКИХ ЧАСТИЦ В ПЕРЕМЕЩАЕМОМ ВОЛОКНИСТОМ МАТЕРИАЛЕ | 2013 |
|
RU2545495C1 |
Изобретение относится к области машиностроения для легкой промышленности и может быть использовано при обнаружении металлических частиц, например обломков игл, в нетканой основе при производстве синтетической кожи, фетра. Способ заключается в том, что материал перемещают через зону работы двух датчиков обнаружения и зону нанесения метки, фиксируют момент приема информации с датчиков в виде импульса, синхронно перемещают его с перемещением материала и через заданное расстояние считывают информацию в блок управления из постоянного запоминающего устройства и от первого датчика обнаружения. Предварительно в постоянное запоминающее устройство записывают координаты различных вариантов размещения металлических частиц по ширине полотна, а с блока управления формируют управляющую информацию для нанесения метки. Данное изобретение решает задачу сокращения избыточной и ложной информации и повышения достоверности определения координат расположения частиц в материале. 7 ил.
Способ обнаружения металлических частиц в движущемся материале, заключающийся в том, что материал последовательно перемещают через зону работы двух датчиков обнаружения и зону нанесения метки, информацию о наличии металлической частицы в полотне принимают с первого датчика обнаружения, фиксируют момент приема, запоминают эту информацию в виде единичного импульса и перемещают его синхронно с перемещением материала посредством шаговых импульсов с датчика перемещения, принимают информацию о наличии металлической частицы в полотне с второго датчика обнаружения и фиксируют момент приема, а с блока управления формируют управляющую информацию для нанесения метки, отличающийся тем, что после приема информации со второго датчика обнаружения ее запоминают в виде единичного импульса и перемещают его синхронно с перемещением материала посредством шаговых импульсов с датчика перемещения, а после прохождения заданного расстояния единичным импульсом с первого датчика обнаружения формируют короткий импульс, которым считывают информацию в блок управления из постоянного запоминающего устройства и запомненную информацию от первого датчика обнаружения и после считывания осуществляют установку в нулевое состояние старших разрядов запомненной информации от первого датчика обнаружения и всех разрядов запомненной информации от второго датчика обнаружения, при этом в качестве младшей части адреса постоянного запоминающего устройства используют запомненную информацию от второго датчика обнаружения, а в качестве старшей части адреса постоянного запоминающего устройства используют запомненную информацию с первого датчика обнаружения, причем предварительно в постоянное запоминающее устройство записывают координаты различных вариантов размещения металлических частиц по ширине полотна.
| Устройство для обнаружения металлических частиц в движущемся материале | 1978 |
|
SU767254A1 |
| WO 9203300 A1, 05.03.92 | |||
| Устройство для сбора и накопления информации | 1971 |
|
SU451209A1 |
| EP 0267021 A2, 11.05.88 | |||
| Способ получения сульфированных реагентов для обработки глинистых растворов | 1958 |
|
SU116273A1 |
| Устройство для дискретного задания углов | 1980 |
|
SU957384A1 |
