Изобретение относится к устройству и способам практически полного устранения вызываемых температурой погрешностей измерения с помощью измерительного прибора Кариолиса для измерения удельного массового расхода жидких сред, в противном случае упомянутые погрешности обычно возникают в результате различий в рабочей характеристике между двумя индивидуальными входными каналами, используемыми в измерительном приборе.
В настоящее время измерительные приборы Кариолиса находят все большее практическое применение в самых различных практических областях в качестве точного средства измерения удельного массового расхода различных технологических жидкостей.
В общем измерительный прибор Кариолиса для измерения удельного массового расхода жидкости, например тот, который описан в патенте США N 4491025 (выдан на имя Дж. Е. Смита и др. 1 января 1985 и принадлежащего правоприемнику настоящей заявки; этот патент ниже будем называть просто патент Смита '025), содержит одну или две параллельные трубки, каждая из которых выполнена в виде U-образной трубки Вентури.
Как указано в патенте Смита '025, каждая трубка Вентури приводится в движение с целью возбуждения колебаний вокруг оси с последующим образованием вращательной системы отсчета. Для U-образной трубки Вентури эту ось можно называть изгибающейся осью. По мере прохождения технологической жидкости через каждую колеблющуюся трубку Вентури движение этой жидкости будет образовывать реактивные силы Кариолиса, которые будут перпендикулярны как к скорости жидкости, так и к угловой скорости самой трубки.
Эти реактивные силы Кариолиса, хотя они и очень небольше по сравнению с силой, при которой приводятся в действие трубки Вентури, однако их будет все же достаточно для того, чтобы заставить каждую трубку Вентури скручиваться вокруг оси кручения, чтобы U-образная трубка Вентури располагалась перпендикулярно по отношению к своей изгибающей оси.
Степень кручения каждой трубки Вентури непосредственно связана с удельным массовым расходом протекающей по ней технологической жидкости.
Довольно часто это кручение измеряют с помощью сигналов скорости, получаемых от электромагнитных датчиков скорости, которые установлены на одной или двух трубках Вентури с целью образования полного профиля скорости движения каждой трубки Вентури по отношению либо к другой трубке Вентури, либо к фиксированной точке отсчета.
В измерительных приборах Кариолиса с двумя трубками обе трубки Вентури приводятся в действие противоположным образом, чтобы каждая трубка Вентури колебалась (вибрировала) в качестве индивидуальной стороны камертона. Срабатывание этого "камертона" будет практически полностью устранять все нежелательные вибрации, которые в противном случае могут маскировать силу Кариолиса.
В таком измерительном приборе Кариолиса удельный массовый расход проходящей через прибор жидкости обычно будет пропорционален временному интервалу (так называемое значение "Δt"), который охватывает период от момента, когда одна расположенная на боковой ножке трубки Вентури точка пересекает заданное месторасположение, например, соответствующую среднюю плоскость колебания, и до момента, когда расположенная на противоположной боковой ножке этой же трубки Вентури соответствующая точка пересекает свое соответствующее месторасположение, например, свою соответствующую среднюю плоскость колебания.
Для приборов Кариолиса для измерения удельного массового расхода жидкости с двумя параллельными трубками Вентури упомянутый временной интервал обычно равен разности фазы между сигналами скорости, посылаемыми в обе трубки Вентури на основной (резонансной) частоте, на которой функционируют трубки Вентури.
Кроме того, резонансная частота, на которой происходит колебание каждой трубки Вентури, зависит от общей массы данной трубки, т.е. от массы самой трубки, когда она будет пустой, плюс масса протекающей по трубке жидкости.
Поскольку общая масса изменяется в зависимости от изменения плотности протекающей по трубке жидкости, то скорее всего, что и резонансная частота будет изменяться по мере любого изменения в плотности жидкости, а следовательно, это изменение резонансной частоты можно будет использовать для отслеживания любых изменений в плотности жидкости.
В течение какого-то периода времени специалисты в данной области полагали, что оба сигнала скорости обрабатываются по меньшей мере с помощью какой-то аналоговой схемы с целью последующего генерирования выходных сигналов, которые будут пропорциональны удельному массовому расходу технологической жидкости.
В частности, связанный с каждым датчиком скорости выходной сигнал обычно подается через аналоговую схему, например, через интегратор, а затем через детектор переходов через нулевой уровень (компаратор); аналоговая схема расположена внутри соответствующего индивидуального входного канала.
По данной проблеме отсылаем к патентам США NN 4879911 (выдан 14 ноября 1989 на имя М. Дж. Золока), 4872351 (выдан 10 октября 1989 г. на имя Дж. Р. Руеша), 4843890 (выдан 4 июля 1989 на имя А. Л. Самсона и др.) и 4422338 (выдан 27 декабря 1983 на имя Дж. Е. Смита), причем все упомянутые патенты принадлежат правопреемнику настоящей заявки.
Хотя описанные в упомянутых патентах различные способы и средства обеспечивают достаточно точные результаты измерений в самых различных областях, однако раскрытые здесь измерительные приборы, также как и уже известные измерительные приборы Кариолиса, имеют один общий недостаток, который усложняет проблему их практического использования.
В частности, приборы для измерения удельного массового расхода жидкости Кариолиса осуществляют свою функцию посредством обнаружения очень небольшой междуканальной разности фаз среди сигналов, которые генерируют датчики скорости, например, значение Δt, и преобразования этой разности в сигнал, который будет пропорционален удельному массовому расходу жидкости. Хотя на первый взгляд значение Δt получают на основе результатов измерения разности фаз, однако это значение фактически является также и результатом измерения фазы.
За счет использования результатов измерения фаз можно относительно легко и просто измерить с высокой степенью точности любой разности фазы, появляющейся между сигналами датчика скорости.
В выпускаемых в настоящее время измерительных приборах Кариолиса по патенту правопреемника настоящей заявки упомянутая разность стремится быть равной примерно 130 мл/с при максимальном расходе жидкости. Каждый входной канал в измерительном приборе Кариолиса сообщает своему входному сигналу какую-то междуканальную фазовую задержку.
Хотя количественное выражение подобной задержки обычно будет очень незначительное, однако довольно часто оно будет значительным и иметь значение, особенно при сравнении с небольшой междуканальной фазовой задержкой, например, в 130 л/с или меньше, и такая задержка будет обнаруживаться.
Выпускаемые в настоящее время измерительные приборы Кариолиса основываются на допущении, что каждый входной канал придает своему соответствующему сигналу скорости какую-то определенную и фиксированную степень фазовой задержки. Следовательно, эти измерительные приборы Кариолиса обычно полагаются на первое измерение, т.е. на условие потока истинного нуля, которое имеет место в процессе калибровки измерительного прибора, либо междуканальной фазовой разности (Δt), либо указанного удельного массового расхода.
Следовательно, хотя эти приборы измеряют фактический расход жидкости, однако затем они же будут вычитать (каким-то образом) полученное в результате измерения значение из измеренной разности Δt или из значения удельного массового расхода, чтобы выдать абсолютно точное значение удельного массового расхода проходящей через прибор технологической жидкости.
К сожалению, практика доказала, что подобное допущение не является верным. Прежде всего следует указать на то, что довольно часто каждый входной канал выдает различную степень внутренней фазовой задержки по отношению к другому каналу; кроме того, образуемая каждым входным каналом фазовая задержка зависит от температуры, при этом фазовая задержка дифференцированно изменяется от одного канала к другому в зависимости от соответствующих изменений температуры.
Подобное изменение температуры является главной причиной появления вызываемой температурой междуканальной фазовой разности. Поскольку измеренная фазовая разность (Δt), которая является прямым следствием прохождения потока жидкости через приборы, будет относительно небольшой, однако в определенных ситуациях погрешность в измеренной фазовой разности между сигналами скорости, которую можно приписать обусловленной температурой междуканальной фазовой разности, может оказаться довольно значительной.
Подобная погрешность обычно не учитывается в выпускаемых в настоящее время измерительных приборах Кариолиса для измерения удельного массового расхода жидкости. В каких-то конкретных ситуациях подобная погрешность может привести к появлению довольно большой и зависимой от температуры погрешности в результатах измерения удельного массового расхода жидкости, что в конечном итоге приводит к неправильному измерению расхода жидкости.
Одно из известных решений этой проблемы заключается в образовании специального кожуха вокруг используемых в измерительном приборе Кариолиса трубок и вокруг электронного блока этого прибора; с помощью этого кожуха в приборе будет поддерживаться заданная температура.
В случае использования именно этого технического решения проблемы, целью которого является предохранение прибора от воздействия на него колебаний внешней температуры и поддержание внутри прибора относительно постоянной температуры, мы сталкиваемся с резким увеличением расходов по установке прибора, причем в данном случае ограничивается также диапазон его практического использования.
Следовательно, в тех случаях, когда проблема расходов имеет первостепенное значение, практически исключается возможность использования этого измерительного прибора. В тех случаях, когда измерительный прибор предполагается установить в помещении, и он не будет испытывать отрицательное влияние изменения температуры в широких пределах, происходящая из-за вызываемой колебаниями температуры междуканальной фазовой разности погрешность измерения, которая вообще-то не исключается, будет стремиться оставаться очень незначительной и относительно постоянной.
Пользователь к такой погрешности обычно относится снисходительно. К сожалению, в других ситуациях, когда прибор не заключен в регулирующий температурный режим кожух, например, при его использовании на открытом воздухе, где он подвергается воздействию широких колебаний температуры, упомянутая погрешность может оказаться довольно значительной, и она может измеряться от измерения к измерению, а поэтому эту погрешность необходимо будет учитывать.
Помимо погрешностей, непосредственно связанных с обуславливаемыми изменениями температуры междуканальными фазовыми разностями, многие выпускаемые в настоящее время приборы Кариолиса для измерения удельного массового расхода жидкости часто имеют дополнительный источник связанных с колебанием температуры погрешностей измерения.
В частности, с помощью приборов Кариолиса обычно измеряют температуру трубки Вентури, и вследствие изменений эластичности трубки Вентури в зависимости от изменения температуры соответствующим образом изменяется значение коэффициента измерительного прибора, основанное на текущей температуре трубки. После этого измененный таким образом коэффициент измерительного прибора используют для пропорционального связывания значения междуканальной фазовой разности (Δt) с удельным расходом.
Температуру трубки Вентури измеряют посредством преобразования в цифровую форму выходного сигнала от соответствующего аналогового датчика температуры, например, от устойчивого к температурным колебаниям устройства (RTD) из платины, который обычно устанавливают на внешней поверхности трубки Вентури. Преобразованный в цифровую форму выходной сигнал обычно принимает форму сигнала частоты, который довольно часто генерирует преобразователь напряжение частота (V/F) и который подсчитывается на протяжении какого-то конкретного интервала синхронизации, чтобы выдать затем аккумулированное цифровое значение, которое будет пропорционально температуре трубки Вентури.
К сожалению, на практике преобразователи V/F обычно демонстрируют какой-то температурный дрейф, который на основе величины изменения окружающей температуры может привести к возникновению погрешности, которая иногда достигает нескольких градусов, в результатах измерения температуры трубки Вентури. Подобная ошибка неизбежно сказывается на погрешности при измерении удельного массового расхода жидкости.
В патенте США N 4817448 (выдан 4 апреля 1989 г. на имя Дж. В. Харгартена и др. который также принадлежит правопреемнику настоящей заявки) описывается ранее предложенное решение, которое имеет непосредственное отношение к зависимым от температуры вариациям в рабочей характеристике входных каналов измерительных приборов Кариолиса.
В упомянутом патенте раскрывается двухканальная переключающая входная схема для использования в измерительных приборах Кариолиса. В частности, эта схема содержит двухполюсной, двухпозиционный переключатель полевого транзистора, расположенный между выходами датчиков скорости и входами в оба канала.
В одной своей позиции переключатель полевого транзистора (FET) обеспечивает соединение выходов левого и правого датчиков скорости с соответствующими входами левого и правого каналов соответственно; при нахождении переключателя в противоположной позиции, упомянутые соединения меняются на обратное. Переключатель меняет свою позицию при каждом последовательном цикле движения трубки Вентури.
Следовательно, выходной сигнал от каждого датчика скорости будет поочередно подаваться в оба канала в определенной последовательности. На протяжении интервала из двух циклов происходят соответствующие измерения временных интервалов по отношению к сигналу скорости, который или которые подаются в оба канала, с последующим их усреднением с целью выдачи одного значения временного интервала, из которого уже были удалены погрешности, которые можно приписать каждому индивидуальному каналу.
Затем это конечное значение временного интервала используют для определения удельного массового расхода жидкости, проходящей через измерительный прибор.
Хотя предложенное решение фактически почти полностью устраняет вызываемые изменением температуры междуканальные фазовые разности, однако этому решению присущ недостаток, который несколько ограничивает его диапазон использования. В, частности, упомянутые в патенте '448, выданном Харгартену и др. входные схемы измерительного прибора не включают в себя интеграторы.
Из-за отсутствия этапа фильтрования низких частот, который выполняют интеграторы, упомянутые входные схемы будут восприимчивы к помехам. К сожалению, описанная в этом патенте схема переключения не предусматривает установку интеграторов в переключающей части входной схемы, а следовательно для обеспечения соответствующей защиты от помех необходимо установить за переключателем полевого транзистора соответствующий интегратор. К сожалению, в данном случае довольно трудно будет компенсировать, если это вообще будет возможно, присущую интегратору задержку по фазе.
Поскольку интегратор имеет тенденцию образовывать исключительно большой источник задержки по фазе во входной схеме, то включение такого интегратора будет добавлять какой-то ошибочный компонент, например, нескомпенсированную задержку по фазе в уже измеренные значения Δt.
Более того, эта задержка по фазе будет также изменяться по мере изменения температуры. Следовательно, полученные значения измеренного удельного массового расхода жидкости будут содержать какой-то компонент погрешности. Следовательно, становится очевидным, что предложенное по патенту '448 решение ограничивается теми случаями и ситуациями, которые относительно свободны от помех.
Следовательно, все еще существует необходимость в создании такого измерительного прибора Кариолиса, который будет гарантировать выдачу точных значений относительно удельного массового расхода жидкости, причем эти значения будут по существу нечувствительны к колебаниям температуры окружающей среды, а сам измерительный прибор будет обладать соответствующим иммунитетом против возможных помех, связанных с отрицательным влиянием колебаний температуры.
Такой измерительный прибор должен будет обладать минимальными (если таковые вообще будут) связанными с колебаниями температуры погрешностями измерения на протяжении относительно широких диапазонов колебания температуры внешней среды, а следовательно станет возможным использовать измерительный прибор для выдачи исключительно точных результатов измерения удельного массового расхода жидкости в самых различных областях практического использования приборов и практически без необходимости заключать приборы в кожух или корпуса с регулируемым температурным режимом.
Более высокая степень точности измерений и экономические соображения (отпадает необходимость в сооружении специальных кожухов или корпусов) значительно расширяет диапазон практического применения такого измерительного прибора.
Главной целью настоящего изобретения является создание такого измерительного прибора Кариолиса, который гарантирует выдачу точных результатов измерения, которые практически не будут чувствительны, а следовательно и зависеть от колебаний температуры окружающей среды.
Специфической целью изобретения является создание такого измерительного прибора, который по существу, если не полностью, устраняет необходимость в сооружении кожуха или корпуса с регулируемым температурным режимом.
Другой целью изобретения является создание измерительного прибора Кариолиса, измеренные значения потока и массового расхода жидкости которого не содержат какой-либо значительной погрешности или вообще не содержат никаких погрешностей, которые в противном случае являются результатом появления во входных каналах переключающих переходных состояний.
Эти и другие цели настоящего изобретения достигаются за счет осуществления циклического срабатывания каждого канала прибора, в частности за счет использования относительно короткого периода между:
а) измерением внутренней фазовой задержки этого канала, и
б) измерением потока жидкости, основанным на значениях Δt.
Затем исходное значение или значения корректируют обычно путем вычитания из них измеренного значения фазовой задержки, чтобы выдать скорректированное значение Δt. После этого с помощью скорректированного, а не исходного значения или значений Δt (что типично для известного уровня техники) определяют правильное значение Δt удельного массового расхода жидкости.
Следует обратить внимание на то, что два одинаковых входных канала (т.е. левый и правый каналы), которые обычно используют в измерительных приборах Кариолиса известного уровня техники, по изобретению заменяют двумя парами входных каналов (т.е. парами A-C и B-C), что дает возможность измерить текущую внутреннюю фазовую задержку, демонстрируемую каждой парой каналов.
Каждая из пар каналов используется так, чтобы образовать цикл между измерением своей собственной внутренней фазовой задержки, т.е. режим "установки на нуль", и измерением значений Δt для фактических условий потока жидкости, т.е. режим "измерения".
При довольно короткой продолжительности цикла значение задержки фазы электротока будет точно отражать любые вызываемые колебанием температуры изменения, происходящие в рабочей характеристике каждой канальной пары. После получения точного значения задержки фазы электротока это значение будет использоваться для корректировки значений Δt на основе расхода жидкости, которые получают с помощью пары каналов в следующем режиме измерения этой пары.
Поскольку выдаваемые каждой канальной парой результаты основанного на расходе жидкости измерения Δt будут корректироваться с учетом связанной с этой конкретной канальной парой задержки фазы электротока, то эти значения Δt не содержат каких-либо значительных компонентов вызываемой колебанием температуры погрешности, причем это не зависит от температуры окружающей среды и ее колебаний.
Например, созданный в соответствии с настоящим изобретением измерительный прибор Кариолиса можно будет успешно использовать в окружающей среде с широким колебанием температурного режима и по существу без какого-либо отрицательного влияния на точность измерения со стороны колебаний температуры.
По предпочтительному варианту изобретения обладающая всеми признаками новизны схема измерения расхода жидкости использует три индивидуальных идентичных входных канала (т.е. каналы A, B и C), посредством которых и происходит последовательное и чередующееся взятие результатов измерения междуканальной фазовой разности от каждой из двух пар каналов, т.е. от пар A-C и B-C этих трех каналов.
Канал C выступает в качестве эталонного канала и в него непрерывно подается один из двух сигналов датчика скорости, а также специально для целей предпочтительного варианта изобретения сигнал левого датчика скорости в качестве его входного сигнала. Ввод в каналы A и B представлен входными сигналами левого или правого датчика скорости.
Хотя как нулевой режим, так и режим измерения, включают измерение междуканальной разности фаз в какой-то паре каналов, однако главное различие между ними заключается в том, что при нулевом режиме один и тот же сигнал датчика скорости подается в оба канала какой-то определенной пары, чтобы результирующее измерение междуканальной фазовой разности выдавало конечный результат измерения внутренней фазовой задержки для этой пары каналов; в режиме измерения сигналы левого и правого датчиков скорости подаются в соответствующие различные каналы конкретной пары, чтобы выдать результат (пусть и не скорректированный) основанного на текущем потоке жидкости значения Δt для последующего его использования при определении текущих значений удельного массового расхода жидкости.
Хотя в течение выполнения обоих режимов отбираются результаты измерения междуканальной фазовой разности (Δt), однако для упрощения объектов изобретения и чтобы избежать возможных недоразумений, автор изобретения проводит четкое различие между этими значениями.
Ниже заявитель будет ссылаться только на те измерения фазы, которые осуществляются в нулевом режиме и результаты которых выступают в качестве измерений междуканальной фазовой разности, и только на те измерения, которые осуществляются в режиме измерения и результаты которых выступают в качестве значений Δt.
Следует особо подчеркнуть, что для любой канальной пары, работающей в нулевом режиме, например, для пары A-C, один и тот же сигнал, например, левого датчика скорости, подается на входы обоих каналов этой пары. Затем в течение так называемого интервала "установки на нуль" последовательно и повторно отбирают результаты измерения междуканальной фазовой разности, причем эти результаты будут усредняться в течение этого же интервала.
В идеальном случае, если оба канала данной пары демонстрируют одну и ту же внутреннюю фазовую задержку, т.е. если задержка по фазе через канал A будет равна задержке по фазе эталонного канала C, тогда все конечные результаты измерения междуканальной фазовой разности будут равны нулю.
Однако, в действительности в какой-то один момент все три канала обычно обладают различными внутренними фазовыми задержками. И тем не менее, поскольку фазовая задержка для каждой пары каналов измеряется относительно одного и того же эталонного канала, например, канала C, то любые различия в фазовой задержке между двумя парами каналов обуславливаются различиями в задержке внутренней фазы, происходящей между каналами A и B.
После окончания интервала "установки на нуль" вход в неэталонный канал данной пары переключается на другой сигнал датчика скорости, т.е. на сигнал правого датчика скорости. Затем ждут истечения какого-то конкретного периода времени, включающего в себя так называемый интервал "переключения", перед моментом начала функционирования канальной пары в режиме "измерения", в течение которого происходят измерения основанных на расходе жидкости значений Δt. Интервал переключения будет достаточно продолжительным, чтобы дать возможность устояться всем вызванным переключением переходным состояниям.
В тот момент, когда одна пара каналов, например A-C, работает в своем нулевом режиме, другая пара каналов, например B-C, работает в своем режиме измерения, чтобы гарантировать непрерывный процесс измерения потока жидкости. Для любой канальной пары будет корректироваться каждое последовательное и основанное на текущем расходе жидкости значение Δt, полученное в течение режима измерения, причем эта корректировка обычно осуществляется посредством вычитания самого последнего значения внутренней фазовой задержки, которая уже была измерена для этой канальной пары в течение предыдущего режима установки на нуль или просто нулевого режима.
Длительность интервала, в течение которого одна канальная пара работает в режиме измерения, т.е. интервал измерения, будет равна всему периоду времени, в течение которого другая пара каналов работает в нулевом режиме. Этот последний период времени включает в себя интервал времени, в течение которого последний канал переключают свой ввод неэталонного канала с сигнала от правого на сигнал от левого датчика скорости с последующим выполнением операции установки на нуль и окончательным переключением ввода своего неэталонного канала с сигнала от левого датчика вновь на сигнал от правого датчика скорости.
После завершения интервала измерения канальные пары просто переключают режимы работы, например, канальная пара B-C первоначально переключает свой ввод неэталонного канала с сигнала от правого на сигнал от левого датчика скорости, а канальная пара A-C начинает измерения основанных на расходе жидкости значений Δt.
После завершения этапа переключения ввода канальная пара B-C выполняет режим установки на нуль с последующим переключением канала в противоположном направлении, хотя канальная пара A-C остается в режиме измерения.
Кроме того, по настоящему изобретению устраняются практически все вызываемые колебанием температуры погрешности измерения температуры трубки Вентури, причем это достигается с помощью устойчивого к температурным колебаниям устройства и особенно связано с температурным дрейфом в преобразователе напряжение частота. В более узком смысле, чтобы устранить все эти погрешности, необходимо будет избирательно и последовательно преобразовать два эталонных напряжения, помимо напряжения устойчивого к температурным колебаниям устройства, с помощью преобразователя напряжение - частота в значения частоты (на основе соответствующих подсчетов), а затем использовать эти значения частоты для определения линейной зависимости, особенно коэффициента пропорциональности, которая связывает подсчитанное значение частоты с измеренной температурой трубки Вентури.
После этого путем простого умножения подсчитанного значения частоты для напряжения устойчивого к температурным колебаниям устройства на упомянутый коэффициент получают значение для соответствующей изморенной температуры трубки Вентури.
Поскольку эталонные напряжения по существу не будут изменяться, а если и будут, то в очень незначительной степени, по мере колебания температуры и каждое из этих напряжений будет повторно преобразовываться с помощью преобразователя напряжение частота с относительно короткой периодичностью, приблизительно через каждые 0,8 с, то любой образуемый в результате преобразования напряжение частота температурный дрейф будет точно отражаться в результирующих или конечных значениях подсчитанной частоты для самих эталонных напряжений.
Так как температурный дрейф в равной степени влияет на подсчитанные значения для обоих эталонных напряжений и напряжения устойчивого к температурным колебаниям устройства, но не изменяет зависимостей между ними, то коэффициент пропорциональности после его умножения на значение подсчитанной частоты для напряжения устойчивого к температурным колебаниям устройства выдает истинное значение температуры, которое по существу не зависит от любого температурного дрейфа, образуемого преобразователем напряжение частота.
За счет устранения вызываемых колебаниями температуры погрешностей в измеренной температуре будет соответствующим образом модифицирован коэффициент измерительного прибора, чтобы последний с высокой степенью точности отражал любые изменения в температуре трубки Вентури.
Более того, хотя измерительный прибор и по изобретению определяет текущее значение отметки механического нуля (т.е. нулевое значение смещения потока в измерительном приборе), основанное на количестве измерений Δt без потока, выполненных в течение калибровки измерительного прибора, однако, одним из важных признаков предлагаемого измерительного прибора является использование упомянутого значения для последующей корректировки фактических измерений потока только в случае, если содержание помех или искажений в результатах измерения Δt без потока будет достаточно низким, в противном случае упомянутое значение вообще игнорируется.
Количество измерений Δt без потока регулируется одним из трех следующих факторов:
а) всякий раз, когда стандартное отклонение результатов измерения опускается ниже предела сходимости;
б) всякий раз, когда пользователь вручную заканчивает процесс отметки механического нуля или
в) если уже было выполнено заданное максимальное количество таких измерений.
На фиг.1 показана общая схема измерительной системы Кариолиса 5 для измерения удельного массового расхода; на фиг.2 детализированная блок-схема хорошо известного электронного блока 20, показанного на фиг.1; на фиг.3 и 4
коллективное воспроизведение блок-схемы высокого уровня предпочтительного варианта схемы измерения потока 30 по изобретению; на фиг.5 и 6 коллективное воспроизведение схемы синхронизации операций, выполняемых канальными парами A-C и B-C в схеме измерения потока 30, показанной на фиг.3 и 4; на фиг.7 - таблица состояний схемы 70, которая расположена в пределах схемы измерения потока 30, показанной на фиг.3 и 4; на фиг.8 воспроизведение упрощенной блок-схемы основного контура измерения потока 600, который обслуживает микропроцессор 80, расположенный в пределах схемы измерения потока 30, показанной на фиг. 3 и 4; на фиг.9 и 10 коллективное воспроизведение блок-схемы стандартной программы определения нуля 700, которая реализуется в виде какой-то части главного контура 600, показанного на фиг.8; на фиг.11 и 12 коллективное воспроизведение блок-схемы стандартной программы определения отметки механического нуля 800, которая реализуется в виде какой-то части стандартной программы определения нуля 700, показанной на фиг.9 и 10, на фиг. 13 схематическое изображение операций установки на нуль, которые осуществляются для каждого соответствующего диапазона стандартного отклонения, т.е. δΔt, измеренных значений Δt, которые получают в ходе осуществления процесса определения отметки механического нуля; на фиг.14 схематическое изображение диапазонов приемлемых и неприемлемых значений отметки механического нуля; на фиг. 15 блок-схема стандартной программы обработки температуры устойчивого к температурным колебаниям устройства 1100, которая реализуется на периодически прерываемой основе микропроцессором 80, установленным в обладающей всеми признаками изобретения схеме измерения потока 30, показанной на фиг.3A и 3B.
С целью упрощения описания и понятия сути изобретения для обозначения одинаковых для всех чертежей элементов прибора используются идентичные ссылочные позиции.
После прочтения описания изобретения специалистам в данной области будет совершенно ясно, что новые идеи автора изобретения можно использовать в пределах широкого разнообразия схем, которые измеряют многократные входные сигналы с помощью нескольких аналоговых входных каналов.
Измерительный прибор по изобретению рекомендуется использовать в тех ситуациях, когда хотят устранить большую часть, если не все погрешности, которые в противном случае могут возникать из-за различий в рабочей характеристике индивидуальных каналов и которые можно приписать, например, колебаниям температуры, старению и/или другим факторам, которые по-разному влияют на расположенную в приборе аналоговую схему.
Вполне понятно, что подобное использование будет включать в себя любой измерительный прибор Кариолиса независимо от объекта измерения, т.е. упомянутый прибор можно использовать для измерения расхода или скорости потока, плотности и прочих параметров технологической жидкости. И том не менее, для краткости входная схема по изобретению будет рассматриваться применительно к измерительному прибору Кариолиса с двойной трубкой Вентури, который особенно эффективен при измерении удельного массового расхода и суммарного массового расхода.
На фиг.1 показана общая схема системы измерения массового расхода Кариолиса 5.
Эта измерительная система 5 состоит из двух основных компонентов: блока измерительного прибора Кариолиса 10 и электронного блока прибора 20. Блок 10 осуществляет измерение удельного массового расхода желаемой технологической жидкости. Электронный блок 20 прибора, который соединен с блоком прибора 10 через провода 100, обеспечивает выдачу иллюстративной информации относительно удельного массового расхода и суммированного массового расхода.
Информация об удельном массовом расходе подается по проводам 26 в виде частоты и в виде масштабированного импульса.
Кроме того, информация об удельном массовом расходе выдается также в виде аналогового сигнала в 4-20 мА по проводам 26, чтобы можно было легко и просто передать эту информацию в расположенное ниже оборудование по регулированию процесса и/или по измерению.
Показанный на фиг. 1 блок 10 измерительного прибора Кариолиса включает пару патрубков 110 и 110'; трубчатый элемент 150; пару параллельных трубок Вентури 130 и 130'; приводной механизм 180; пару датчиков скорости 160Lи 160R и пару постоянных электромагнитов 170L и 170R. Трубки Вентури 130 и 130' выполнены по существу U-образной формы, а их концы закреплены в монтажных блоках 120 и 120', которые в свою очередь прикреплены к соответствующим патрубкам 110 и 110'. Обе трубки Вентури не имеют никаких чувствительных к давлению соединений.
Боковые ножки трубок Вентури 130 и 130' неподвижно закреплены в монтажных блоках 120 и 120', а эти блоки в свою очередь неподвижно прикреплены к патрубкам 110 и 110', что хорошо видно из фиг.1; через блок 10 измерительного прибора Кариолиса проходит непрерывная замкнутая траектория потока жидкости.
После подсоединения измерительного прибора 10 через впускной конец 101 и выпускной конец 101' к системе трубопровода (не показана), по которой циркулирует предназначенная для измерения технологическая жидкость, эта жидкость поступает в прибор через расположенное во впускном конце 101 патрубка 110 отверстие и проходит дальше через расположенный здесь же канал, имеющий постепенно изменяющийся профиль по отношению к монтажному блоку 120 трубки Вентури. Здесь происходит разделение потока жидкости и его направление в сторону трубок Вентури 130 и 130', через которые будет проходить жидкость.
После возбуждения трубок Вентури 130 и 130' технологическая жидкость повторно объединяется в одиночный поток внутри монтажного блока 120', а затем будет направляться к патрубку 110'. Внутри патрубка 110' поток жидкости проходит через канал, имеющий такой же постепенно изменяющийся профиль (поперечное сечение), что и патрубок 110 (показано пунктирными линиями на фиг. 1) по отношению к расположенному на выпускном конце 101' отверстию. На выпускном конце 101' жидкость будет повторно входить в систему трубок.
По трубчатому элементу 150 не будет проходить никакая жидкость. Фактически этот трубчатый элемент выполняет функцию центрирования в аксиальном направлении патрубков 110 и 110' и поддержания между ними соответствующего интервала в заданных пределах, чтобы эти патрубки легко и просто принимали монтажные блоки 120 и 120' и трубки Вентури 130 и 130'.
Две U-образные трубки Вентури 130 и 130' устанавливаются в монтажных блоках таким образом, чтобы они имели по существу одинаковые движения инерции и константы пружины вокруг изгибающих осей W-W и W'-W' соответственно. Эти изгибающие оси ориентируются перпендикулярно боковым ножкам U-образных трубок Вентури и располагаются около соответствующих монтажных блоков 120 и 120'.
U-образные трубки Вентури простираются наружу от монтажных блоков по существу параллельным образом и имеют практически одинаковые движения инерции и одинаковые константы пружины вокруг своих соответствующих изгибающих осей. Поскольку константа пружины трубок Вентури изменяется в зависимости от изменения температуры, то устойчивый к температурным колебаниям детектор (RTD) 190 (в качестве которого обычно выступает устойчивое к температурным колебаниям устройство из платины) устанавливается и крепится на одной из трубок Вентури, в рассматриваемом случае на трубке Вентури 130', чтобы иметь возможность постоянно измерять температуру этой трубки.
Температура самой трубки, а следовательно и появляющееся через RTD напряжение (для какого-то конкретного проходящего через RTD электротока), будет регулироваться температурой жидкости, проходящей через трубку Вентури. Зависимое от температуры напряжение, появляющееся в RTD, используется хорошо известным способом электронным блоком 20 измерительного прибора для соответствующей корректировки значения константы пружины в случае возникновения каких-либо изменений в температуре трубки Вентури. Устройство RTD соединяется с электронным блоком 20 прибора через провода 195.
Обе трубки Вентури приводятся в действие (обычно синусоидальное) в противоположных направлениях вокруг их соответствующих изгибающих осей и по существу на их общей резонансной частоте. Благодаря этому обе трубки Вентури будут вибрировать одинаковым образом, т.е. точно так же, как это делают стороны камертона.
Механизм возбуждения 180 подает колебательные возбуждающие силы в трубки Вентури 130 и 130'. Механизм возбуждения может состоять из любого одного из множества хорошо известных устройств, например из электромагнита, установленного на трубке Вентури 130', и противоположной катушки, установленной на трубке Вентури 130 и через которую будет проходить переменный ток; этот механизм обеспечивает синусоидальное вибрирование обеих трубок Вентури на какой-то общей частоте. Соответствующий сигнал возбуждения подается электронным блоком 20 измерительного прибора через провод 185 непосредственно в механизм возбуждения 180.
При прохождении через обе трубки Вентури потока технологической жидкости, когда сами эти трубки находятся в возбужденном в противоположных направлениях состоянии, вдоль смежных ножек каждой трубки Вентури 130 и 130' будут образовываться силы Кариолиса, но в противоположных направлениях, например сила Кариолиса, образуемая в боковой ножке 131, будет противоположна силе Кариолиса, образованной в боковой ножке 131'.
Это явление происходит только по той простой причине, что технологическая жидкость будет проходить через трубки Вентури в основном в одном и том же параллельном направлении, а векторы угловой скорости для вибрирующих трубок Вентури расположены в противоположных, хотя и по существу параллельных направлениях.
В результате действия сил Кариолиса и в течение половины цикла колебания обеих трубок Вентури боковые ножки 131 и 131' будут скручиваться и приближаться друг к другу на расстояние, которое будет меньше минимального расстояния между этими ножками, образуемого колебательным движением трубок, которое вызывает механизм возбуждения 180.
В течение следующего полуцикла силы Кариолиса будут скручивать боковые ножки 131 и 131' и разводить их на расстояние, которое будет больше максимального расстояния между ножками, образуемого колебательным движением трубок, которое вызывает механизм возбуждения 180.
В процессе колебания трубок Вентури смежные боковые ножки, которые принудительным образом сближаются в большей степени, чем их противоположные боковые ножки, достигают крайней или конечной точки своего движения, в которой скорость их движения пересекает нулевую отметку раньше, чем это делают противоположные ножки.
Промежуток времени (который в данном описании также называют междуканальной фазовой разностью или временной разностью, либо просто значением "Δt"), который продолжается от момента, когда одна пара смежных боковых ножек достигает своей концевой точки движения, и до момента, когда противоположная пара боковых ножек, т.е. ножек, которые принудительно раздвинуты на большее расстояние друг от друга, достигают своей соответствующей конечной точки, будет по существу пропорционален удельному массовому расходу жидкости, протекающей через блок 10 измерительного прибора.
В патенте США N 4491025 (выданного 1 января 1985 на имя Дж. Е. Смита и др.) подробно раскрывается принцип работы измерительных приборов Кариолиса.
Чтобы измерить этот интервал времени Δt, необходимо будет соединить катушки 160L и 160R с любой одной трубкой Вентури 130 или 130' около их свободных концов, а постоянные электромагниты прикрепить около свободных концов другой трубки Вентури. Электромагниты 170L и 170R необходимо расположить таким образом, чтобы катушки 160L и 160R располагались внутри пространства, которое окружает соответствующие постоянные электромагниты и в котором поля магнитного потока будут по существу одинаковыми.
При подобной конфигурации расположения упомянутых элементов генерируемые катушками 160L и 160R электрические выходные сигналы образуют профиль скоростей полного движения трубок Вентури; эти выходные сигналы можно обрабатывать любым одним из множества известных способов с целью последующего определения интервала времени и удельного массового расхода проходящей через измерительный прибор жидкости.
В частности, катушки 160L и 160R образуют левый и правый сигналы скорости, которые появляются соответственно в проводах 165L и 165R.
Кроме того, катушки 160L и 160R вместе с соответствующими электромагнитами 170L и 170R соответственно образуют левый и правый датчики скоростей. Хотя на первый взгляд Δt получают на основе результатов измерения временной разности, однако Δt фактически является результатом измерения фазы. В данном случае достаточно точным средством измерения проявлений фазовой разности, которые имеют место между сигналами левого и правого датчиков скорости, является использование результатов измерения временной разности.
Как уже упоминали выше, электронный блок 20 измерительного прибора принимает в качестве входного сигнала сигнал от RTD (устойчивое к температурным колебаниям устройство), подаваемый по проводу 195, и сигналы от левого и правого датчиков скорости, подаваемые по проводам 165L и 165R соответственно.
Также выше отмечали, что электронный блок 20 измерительного прибора образует и посылает по проводу 185 сигнал возбуждения. Провода 165L, 165R, 185 и 195 имеют коллективное название провода 100. Электронный блок измерительного прибора обрабатывает сигналы левого и правого датчиков скорости и сигнал RTD так, чтобы затем иметь возможность установить удельный массовый расход и суммированную скорость потока жидкости, проходящей через блок 10 прибора.
Выдаваемая электронным блоком информация относительно удельного массового расхода появляется в связанных с этим блоком 20 линиях в пределах вводов-выводов 26 в аналоговой форме силой тока 4-20 мА. Информация об удельном массовом расходе выдается также в виде частоты (обычно с максимальным диапазоном от 0 до 10 КГц) по соответствующей линии в пределах вводов-выводов 26 для последующего соединения с расположенным ниже оборудованием.
На фиг.2 показана блок-схема уже известного электронного блока 20 измерительного прибора. В данном случае электронный блок 20 состоит из схемы измерения потока 23, схемы возбуждения трубки Вентури 27 и из дисплея 29.
Схема возбуждения трубки Вентури 27 (фиг.2) образует и подает по проводу 185 соответствующий повторно чередующийся или импульсный сигнал возбуждения в механизм возбуждения 180. Эта схема также синхронизирует сигнал возбуждения относительно сигнала левого датчика скорости, который появляется в проводах 165L и 25.
В процессе функционирования измерительного прибора схема 27 поддерживает обе трубки Вентури в противоположном синусоидальном вибрирующем движении на основной резонансной частоте. Как известно, регулировка этой частоты осуществляется на основе нескольких факторов, в том числе на основе различных специфических признаков самих трубок и плотности проходящей через измерительный прибор технологической жидкости.
Поскольку схема 27 хорошо известна всем специалистам в данной области и поскольку специфическая реализация этой схемы не составляет какой-либо части настоящего изобретения, то больше не будем останавливаться на ее детальном описании. Тех, кого это интересует, отсылаем к патентам США NN 5009109 (выданным 23 апреля 1991 на имя П. Калотая), 4934196 (выдан на имя П. Романо 19 июня 1990) и 4876879 (выдан на имя Дж. Руеша 31 октября 1989), причем все эти патенты принадлежат правопреемнику настоящей заявки и в них раскрываются различные варианты схем возбуждения трубок Вентури.
Схема измерения потока 23 обрабатывает сигналы левого и правого датчиков скорости, которые передаются по проводам 165L и 165R соответственно, а также сигнал RTD, передаваемый по проводу 195, хорошо известным способом, чтобы затем можно было определить удельный массовый расход и суммированный массовый расход технологической жидкости, проходящей через измерительный прибор 10.
Результирующая информация относительно удельного массового расхода жидкости передается по проводу 263 в виде выходного сигнала с силой тока 4-20 мА с последующим подсоединением этого провода к дополнительному расположенному ниже оборудованию управления технологическим процессом (не показано), а также в виде сигнала масштабированной частоты по проводу 262 с последующим подсоединением этого провода с дистанционным суммирующим устройством (не показано).
Передаваемые по проводам 262 и 263 сигналы образуют часть сигналов технологического процесса, которые коллективно передаются по проводам 26 (фиг. 1). Другие провода (специально не показаны) в пределах проводов 26 обеспечивают передачу суммированной информации о потоке, а также некоторые другие параметры технологического процесса в цифровой форме с последующим выводом этой информации на экран дисплея, телеметрического и/или другого занимающегося обработкой информации оборудования.
Поскольку всем специалистам в данной области хорошо известен способ, с помощью которого схема измерения потока 23 выдает информацию об удельном массовом расходе и о суммированном расходе жидкости, то ниже заявитель останавливается лишь на раскрытии той части электронного блока схемы, которая имеет непосредственное отношение к настоящему изобретению.
В этой связи следует напомнить, что схема измерения потока 23 содержит два индивидуальных входных канала: левый канал 202 и правый канал 212. Каждый из этих каналов содержит интегратор и два детектора переходов через нулевой уровень. В пределах этих каналов происходит подача сигналов левого и правого датчиков скорости в соответствующие интеграторы 206 или 216, каждый из которых отлично выполняет функцию фильтра пропускания нижних частот.
Результирующие выходные сигналы от этих интеграторов подаются в детекторы переходов через нулевой уровень (фактически компараторы) 208 и 218, каждый из которых вызывает изменения уровня каждый раз, когда соответствующий интегрированный сигнал скорости превышает предел напряжения, установленный небольшим предварительно определенным уровнем положительного и отрицательного напряжений, например ± В.
Выходные сигналы от детекторов переходов через нулевой уровень 208 и 218 подаются в виде сигналов управления в счетчик 220, чтобы можно было измерить интервал синхронизации (на основе подсчетов синхронизирующих импульсов), который имеет место между соответствующими изменениями в этих выходных сигналах.
Подобный интервал представлен хорошо известным значением Δt, и он изменяется по мере изменения удельного массового расхода технологической жидкости. Результирующее значение Δt (а число подсчетов) подается параллельно и в виде входных данных в схему обработки информации 235.
Кроме того, устройство RTD 190 соединено с вводом входной схемы RTD 224, которая обеспечивает подачу постоянного тока возбуждения в RTD, линеаризирует напряжение, которое появляется в RTD и преобразует это напряжение с помощью преобразователя напряжение частота 226 в поток импульсов, которые имеют масштабированную частоту, которая изменяется пропорционально любому изменению в напряжении RTD.
Образованный схемой 224 результирующий поток импульсов подается в виде входного сигнала в счетчик 228, который будет периодически подсчитывать поток импульсов и выдавать значение (в числе подсчетов), которое будет пропорционально измеренной температуре. Содержимое счетчика 228 будет также подаваться параллельно в виде входных данных в схему обработки информации 235.
Схема обработки информации 235, в качестве которой обычно выступает какой-то микропроцессор, определяет текущий удельный массовый расход на основе поступивших в нее значений температуры и значения Δt в цифровой форме. В данном случае преобразованное в цифровую форму значение температуры используют для изменения значения коэффициента измерительного прибора, основанного на текущей температуре трубок Вентури, а после выполнения этой процедуры связывают изменения в эластичности трубки Вентури с изменением температуры.
Затем этот измененный коэффициент измерительного прибора (т.е. скорректированный на изменение температуры коэффициент или фактор измерительного прибора RF) последовательно используют для пропорционального определения на основе только что измеренного значения Δt удельного массового расхода.
Имея в своем распоряжении только что установленный удельный массовый расход, схема 235 будет обновлять суммированный массовый расход, а также выдавать, например, соответствующие выходные сигналы с информацией об удельном массовом расходе по проводам 26, которые затем можно будет соединить с локальным дисплеем 29 и/или с расположенным ниже (по технологической схеме) оборудованием управления технологическим процессом.
Теперь уже совершенно очевидно, что расположенная в левом и правом каналах аналоговая схема необдуманно вводит какую-то погрешность или ошибку в результирующие значения относительно удельного массового расхода и скорости потока, полученные с помощью схемы обработки данных 235. Следует особо подчеркнуть, что каждый входной канал довольно часто содержит не только различную степень внутренней фазовой задержки относительно друг друга, которая измеряется от ввода интегратора до вывода из его детекторов переходов через нулевой уровень, но и также фазовую задержку, которая образуется внутри каждого канала и явно зависит от температуры, и которая изменяется в различной степени от одного канала к другому в зависимости от соответствующих изменений температуры.
Например, левый канал 202 может демонстрировать фазовую задержку, которая имеет иную температурную зависимость по сравнению с фазовой задержкой правого канала 212. Подобная изменчивость имеет своим конечным результатом появление обусловленной колебаниями температуры междуканальной фазовой разности, которая будет выступать в качестве компонента ошибки или погрешности в измеренном значении Δt. Поскольку значение Δt, полученное на основе измерения фактического потока жидкости, проходящего через прибор, будет относительно небольшим, то в определенных ситуациях упомянутый компонент погрешности может оказаться довольно значительным.
Подобная погрешность обычно не учитывается в выпускаемых в настоящее время измерительных приборах Кариолиса для измерения удельного массового расхода жидкости. В каких-то конкретных ситуациях, в частности в случае установки измерительного прибора вне помещения, т.е. на открытом воздухе с довольно большими температурными перепадами, подобная погрешность может привести к возникновению ошибочных результатов измерения удельного массового расхода жидкости.
В настоящее время помимо зависимых от температуры ошибок в измеренном значении Δt сама схема измерения температуры является дополнительным источником обусловленной колебаниями температуры погрешности результатов измерения значений удельного массового расхода, которые выдает схема обработки данных 235.
Следует иметь в виду, что расположенный в пределах входной схемы 224 устройства RTD преобразователь напряжение частота 226 демонстрирует, как и почти все прочие подобные преобразователи, измеряемый температурный дрейф. Этот дрейф, который основывается на величине изменения в температуре окружающей среды, может привести к возникновению ошибки в результатах измерения температуры трубки Вентури, причем эта ошибка иногда может достигать нескольких градусов максимально. Подобная ошибка в свою очередь будет приводить к возникновению ошибок в модифицированном коэффициенте измерительного прибора, что в свою очередь будет вводить погрешности в выдаваемые значения удельного массового расхода и суммированного массового расхода жидкости.
Чтобы устранить недостатки уже известных измерительных приборов Кариолиса и особенно тех, которые типичны для схемы измерения расхода жидкости, например схемы 23, автор изобретения разработал новый способ использования схемы измерения расхода жидкости в измерительном приборе Кариолиса, который гарантирует почти полную независимость, а следовательно и нечувствительность получаемых прибором значений удельного массового расхода и скорости потока жидкости к изменениям температуры, благодаря чему улучшается общая степень точности измерений.
В более узком смысле по изобретению предложено заменить два индивидуальных входных канала (т.е. левый и правый), которые обычно используются в уже известных схемах измерения потока жидкости, двумя парами входных каналов (т. е. парами A-C и B-C), что дает возможность измерить демонстрируемую каждой канальной парой фазовую задержку.
После получения для каждой канальной пары текущего значения фазовой задержки используют это значение для корректировки основанных на потоке жидкости значений Δt, которые затем измеряют с помощью канальной пары. Поскольку каждая из канальных пар работает циклами, которые составляют относительно короткий период времени, т.е. цикл измерения своей собственной внутренней фазовой задержки, т. е. режим "установки на нуль", чередуется с циклом измерения значений Δt для фактических условий потока жидкости, т.е. режим "измерения", поэтому значение текущей фазовой задержки будет точно отражать любые вызываемые колебанием температуры изменения в рабочей характеристике каждой канальной пары.
Так как выдаваемые каждой канальной парой результаты измерений потока корректируются с учетом текущей внутренней фазовой задержки, которая связана с какой-то конкретной канальной парой, то упомянутые значения Δt не содержат никаких значительных вызываемых колебанием температуры компонентов погрешности независимо от окружающей прибор температуры и ее колебаний.
Следовательно, выполненный по настоящему изобретению измерительный прибор Кариолиса можно успешно использовать в окружающей среде с широкими температурными колебаниями, при этом не наблюдается никакого ухудшения степени точности конечных результатов из-за колебания температуры.
В частности, в предложенной изобретением схеме измерения расхода потока жидкости используется три индивидуальных идентичных входных канала (т.е. каналы A, B и C), через которые последовательно и поочередно отбираются результаты измерений междуканальной фазовой разности для каждой из двух пар (т. е. пар A-C и B-C) трех каналов.
Канальная пара A-С содержит каналы A и C, тогда как канальная пара B-C содержит каналы B и C. Канал C выступает в качестве эталонного канала и в него будут непрерывно подаваться один из двух сигналов датчика скорости, а специально для целей предпочтительного варианта изобретения сюда будет непрерывно поступать сигнал левого датчика скорости в качестве его входного сигнала. Ввод в каналы A и B будет представлен сигналами либо левого, либо правого датчика скорости.
Хотя оба режима, т.е. нулевой режим и режим измерения, включают в себя этап измерения междуканальной фазовой разности в какой-то паре каналов, однако принципиальное различие между ними заключается в том, что в нулевом режиме в оба канала данной пары подается один и тот же сигнал датчика скорости, например левого, чтобы измерение результирующей междуканальной фазовой разности гарантировало измерение внутренней фазовой задержки для данной пары каналов, тогда как в режиме измерения в соответствующие различные каналы этой пары подаются сигналы левого и правого датчиков скорости, чтобы гарантировать измерение пусть и приблизительного, основанного на текущем потоке жидкости значения Δt, для последующего его использования для определения текущих значений удельного массового расхода и скорости потока жидкости.
Хотя в обоих режимах предусматривается проведение измерений междуканальной фазовой разности (Δt), однако для большей ясности автор изобретения проводит четкое разграничение между упомянутыми значениями на основе их частоты появления. Именно поэтому ниже автор изобретения будет делать ссылки на те измерения фазовой разности, которые имеют место в течение нулевого режима и которые будут рассматриваться в качестве измерений междуканальной фазовой разности, а также на те измерения фазы, которые имеют место в измерительном режиме и которые будут рассматриваться в качестве значений Δt.
Кроме того, как измерения междуканальной фазовой разности, так и значения Δt для любой канальной пары, будут ниже просто называться измерениями синхронизации.
Для любой одной канальной пары, работающей в нулевом режиме, например, для пары A-C, на вводы обоих каналов этой пары подается один и тот же сигнал датчика скорости, например левого. Затем в течение так называемого интервала "установки на нуль" проводятся последовательные и повторяющиеся измерения междуканальноЙ фазовой разности, причем в течение этого же интервала полученные при этом результаты будут усредняться.
В идеальном случае, если оба канала этой пары демонстрируют одинаковую внутреннюю фазовую задержку, например, если фазовая задержка через канал A будет равна фазовой задержке эталонного канала C, тогда все измерения результирующей междуканальной фазовой разности будут равны нулю.
Однако на практике фактически все три канала обычно имеют различные внутренние фазовые задержки. И тем не менее, поскольку фазовая задержка для каждой пары каналов измеряется по отношению к одному и тому же эталонному каналу, например к каналу C, то любые различия в фазовой задержке между двумя парами каналов будут обусловлены различиями во внутренней фазовой задержке, которые имеют место между каналами A и B.
После окончания интервала "установки на нуль" ввод в неэталонный канал этой пары переключается на другой сигнал датчика скорости, т.е. на сигнал от правого датчика скорости. Затем необходимо подождать истечения какого-то определенного периода времени, который включает в себя период так называемого "переключения", и только после этого можно будет вводить эту канальную пару в режим "измерения", в течение которого будут измерять основанные на расходе жидкости значения Δt.
Интервал переключения длится достаточно долго, чтобы дать возможность установиться всем результирующим переходным состояниям переключения, например, чтобы их амплитуда затухала ниже заданного уровня.
В тот момент, когда одна пара каналов, например A-С, работает в своем нулевом режиме, другая пара каналов, например B-C, будет работать в своем режиме измерения. Для любой канальной пары каждое последовательно измеренное на основе текущего потока жидкости значение Δt, которое было получено в процессе осуществления режима измерения, корректируется (обычно путем вычитания) с помощью самого последнего значения внутренней фазовой задержки, которая уже была измерена для этой канальной пары в течение ее предыдущего нулевого режима.
Продолжительность, в течение которой одна канальная пара работает в режиме измерения, т.е. интервал измерения, будет равна всей продолжительности, в течение которой другая канальная пара работает в нулевом режиме. Эта последняя продолжительность (т.е. интервал "нуля" или "нулевой" интервал) включает в себя время (т.е. интервал "переключения"), в течение которого последний канал переключает ввод неэталонного канала с сигнала от правого на сигнал от левого датчика скорости с последующим выполнением процедуры установки на нуль (в течение так называемого интервала "установки на нуль") и, наконец, переключает свой ввод неэталонного канала с сигнала от левого вновь на сигнал от правого датчика скорости. Следует иметь в виду, что нулевой интервал включает в себя оба интервала переключения в интервал установки на нуль.
После завершения интервала измерения канальные пары просто переключают режимы работы, при этом канальная пара B-C первоначально переключает свой ввод неэталонного канала с сигнала от правого на сигнал от левого датчика скорости, а канальная пара начинает цикл измерений Δt на основе текущего потока жидкости.
После завершения процедуры переключения упомянутого ввода канальная пара B-C будет выполнять процедуру установки на нуль с последующим переключением канала в противоположном направлении в этот момент канальная пара A-C остается в режиме измерения, и таким образом осуществляются последовательные циклы срабатывания измерительного прибора.
После завершения какой-то канальной парой последней операции переключения, но еще до момента начала своей операции в режиме измерения, эта канальная пара может, в случае необходимости, выполнить функции измерения основанных на потоке жидкости значений Δt в течение какого-то определенного периода времени, который ниже будут называть "активным" интервалом и который для большей простоты имеет длительность, равную интервалу "установки на нуль".
Поскольку оба канала в течение "активного" интервала могут одновременно выдавать основанные на потоке значения Δt, используя при этом сигналы от обоих датчиков скорости, тогда в идеальном случае при отсутствии каких-либо помех, изолированных пертурбаций или различий между внутренними фазовыми задержками, связанными с парами каналов, оба канала будут выдавать одинаковые значения Δt.
Таким образом, в качестве дополнительной проверки можно будет скорректировать одно или более измеренных на основе потока жидкости значений Δt, полученных от каждой канальной пары в течение "активного" интервала, с помощью самого последнего значения измеренной фазовой задержки для этой канальной пары, чтобы иметь возможность выдать соответствующие пары скорректированных значений Δt. Затем эти два значения для каждой канальной пары можно будет сравнить друг с другом. Любое довольно значительное расхождение между этими значениями в любой из канальных пар будет указывать на наличие погрешности или ошибки.
Поскольку переключение каналов происходит только на канальной паре, которая будет противоположна той, которая в данный момент используется для выполнения измерений на основе потока жидкости, то любые переходные состояния переключения (и связанные с ними помехи) будут эффективно изолированы от и не будут прерывать измерения удельного массового расхода или скорости потока технологической жидкости.
Более того, благодаря истечению довольно продолжительного интервала переключения еще до момента начала процедуры установки на нуль, переходные состояния переключения не будут оказывать никакого отрицательного влияния на результаты измерения внутренней фазовой задержки для той канальной пары, которая в данный момент устанавливается на нуль.
Таким образом, рабочая или эксплуатационная характеристика измерительного прибора Кариолиса по настоящему изобретению будет по существу (если не полностью) устойчива по отношению к переходным состояниям переключения ввода и прочим подобным же операциям.
Специфическая продолжительность интервалов переключения и установки на нуль не является критическим фактором. Однако, поскольку переходные состояния переключения очень быстро исчезают, а дополнительное усреднение обычно способствует и гарантирует более высокую степень точности измерений внутренней фазовой задержки, то обычно интервал переключения устанавливается значительно более коротким по сравнению с интервалом установки на нуль.
В этом отношении интервал переключения, измеренный в течение циклов возбуждения трубки Вентури, может продолжаться в течение 16-32 таких циклов, тогда как интервал установки на нуль может иногда продолжаться в течение 2048 таких циклов.
Более того, по изобретению по существу полностью устраняются вызываемые температурными колебаниями погрешности в результатах измерения температуры трубки Вентури, что в основном достигается за счет использования устойчивого к температурным колебаниям устройства (RTD) и непосредственно связано с температурным дрейфом в преобразователе напряжение частота.
Устранению этих погрешностей особенно способствует тот факт, что два эталонных напряжения, помимо напряжения устройства RTD, избирательно и последовательно преобразуются в преобразователе напряжение частота в значения частоты (в виде соответствующих подсчетов) с последующим использованием этих значений для определения линейной зависимости, особенно коэффициента пропорциональности, которая связывает подсчитанное значение частоты с измеренной температурой трубки Вентури.
Затем посредством простого умножения подсчитанного значения частоты для напряжения устройства RTD на упомянутый коэффициент получают значение для соответствующей измеренной температуры трубки Вентури. Поскольку эталонные напряжения заметно не изменяются (или вообще не изменяются) в зависимости от колебаний температуры и каждое из них повторно преобразуется с помощью преобразователя напряжение частота при относительно короткой периодичности на порядок примерно 0,8 с, то возникающий в результате преобразования напряжение частота любой дрейф температуры будет точно отражен в результирующих подсчитанных значениях частоты для самих эталонных напряжений.
Поскольку дрейф температуры в равной степени оказывает свое влияние и на подсчитанные значения для обоих эталонных напряжений и для напряжения устройства RTD, но не изменяет существующие между ними зависимости, то после умножения коэффициента пропорциональности на значение подсчитанной частоты для напряжения устройства RTD этот коэффициент выдает истинное значение температуры, которое по существу не будет зависеть от какого-либо дрейфа температуры, образуемого преобразователем напряжение -частота.
Благодаря устранению вызываемых температурными колебаниями погрешностей в результатах измеренной температуры коэффициент измерительного прибора будет соответствующим образом модифицирован, чтобы он точно отражал изменения в температуре трубки Вентури.
А. Описание аппаратной части
В основном схема измерения потока жидкости 30 содержит входной мультиплексор и три одинаковых входных канала, один из которых будет эталонным каналом C, а также конечный автомат вместе со связанными с ним синхронизирующими счетчиками и систему микрокомпьютера. С помощью конечного автомата и через мультиплексор выбирают входные сигналы для двух неэталонных каналов A и B, а сам конечный автомат работает циклами благодаря своим различным состояниям.
Выходные сигналы от трех каналов подаются в счетчики, чтобы генерировать синхронизирующие измерения, т.е. измерения междуканальной фазовой разности и значения Δt для каждой из двух канальных пар A-C и B-C. Результаты синхронизирующих измерений, выданные упомянутыми счетчиками, а также информация о состоянии от конечного автомата подаются в микрокомпьютер, который в свою очередь будет определять текущие соответствующие значения удельного массового расхода жидкости.
Кроме того, выходной сигнал устройства RTD и два эталонных напряжения будут последовательно преобразовываться в соответствующие значения частоты с помощью соответствующего входного переключателя, преобразователя напряжение
частота и связанной с ними схемы, а затем подсчитываться с помощью синхронизирующего счетчика, связанного с конечным автоматом. Затем упомянутый счетчик направляет результирующие подсчеты в микрокомпьютер, в котором они используются для правильной модификации коэффициента измерительного прибора.
Из упомянутых выше чертежей следует, что схема измерения потока жидкости 30 содержит три одинаковых входных канала 44, 54 и 64, которые в данном описании также называют каналами A, C и B. Кроме того, упомянутая схема измерения потока жидкости содержит также мультиплексор 31, схему 70, аналоговый переключатель 35, генератор эталонного напряжения 39, входную схему 42 устройства RTD, микрокомпьютер 80, выходную схему 90 и входную схему 95.
Показанная на фиг.3 и 4 входная схема 42 устройства RTD выполняет те же функции и содержит по существу ту же схему, что и входная схема 224 устройства RTD, показанная на фиг.2A и 2B и которая уже была кратко описана выше.
Каждый из каналов A и B, из которых показан только канал А, содержит входную аналоговую схему, которая в данном случае представлена усилителем, соединенным с детектором уровней. Что касается канала A, то усилитель 46 обеспечивает соответствующую фильтрацию сигнала от левого датчика скорости, смещение уровня и усиление результирующего смещенного сигнала. Детекторы уровней 48, которые фактически являются компаратором с эталонными уровнями напряжения, обеспечивают изменение уровня своего выходного сигнала всякий раз, когда образуемый усилителем 46 выходной сигнал повышается выше или опускается ниже небольшого фиксированного положительного и отрицательного напряжения.
В данном случае каждый из этих каналов выполняет по существу те же функции, что и соответствующая схема в схеме измерения потока 23, показанной на фиг. 2. Показанный на фиг.3 и 4 канал C содержит схему, представленную усилителем 56 и детектором уровней 58.
Эталонный канал C абсолютно идентичен каналам A и B, за исключением того, что детектор уровней 58 содержит одиночный детектор уровней, а не компаратор с эталонными уровнями напряжения, чтобы можно было всякий раз фиксировать момент, когда выходной сигнал от усилителя 56 превышает небольшой уровень положительного напряжения.
Мультиплексор 31, который, как ясно показано на чертежах, образован из трех индивидуальных мультиплексоров 2 до -1, избирательно выбирает маршрут прохождения сигнала от левого датчика скорости, который подается по проводу 165L, либо сигнала от правого датчика скорости, который подается по проводу 165R, на вход каждого из трех каналов.
В данном случае сигналы от левого и правого датчиков скорости подаются на первый (A0, B0 и C0) и на второй (A1, B1 и C1) вводы соответственно мультиплексора 31. Статус сигналов выбора S0, S1 и S2 точно устанавливает, будет ли подаваться на три индивидуальных (ОA, ОB и ОC) выхода мультиплексора сигнал правого или левого датчика скорости.
Сигналы выбора 33, образованные из сигналов RPO_A и RPO_B, соединенные с входами выбора S0 и S1, заставляют мультиплексор индивидуально прокладывать маршрут прохождения сигналов от левого или правого датчика скорости в качестве входов в каналы A и B соответственно; заземленный сигнал выбора S2 заставляет мультиплексор 31 непрерывно прокладывать маршрут прохождения сигнала от левого датчика скорости, который подается по проводу 165L, до входа в эталонный канал C.
Сигналы выбора 33 устанавливаются логическим контуром управления 72 в схеме 70 с таким расчетом, чтобы можно было выполнить соответствующее переключение входного сигнала.
Схема 70 содержит логический контур управления 72 и синхронизирующие счетчики 74, 76 и 78. Схема 70, в качестве которой рекомендуется использовать специфическую интегральную схему одиночного назначения, по существу представлена конечным автоматом, который определяет периодическую и повторно осуществляемую последовательность синхронизирующих интервалов и сопровождающих состояний.
В течение каждого такого интервала синхронизации подаваемые с внешней стороны входные сигналы могут запускать и прекращать работу соответствующего синхронизирующего счетчика. После завершения этого интервала можно легко и просто считать содержимое этого синхронизирующего счетчика параллельным образом, а затем использовать это содержимое по назначению.
В случае совместного использования этой схемы со схемой измерения потока 30 синхронизирующие счетчики 74 и 76, сгруппированные вместе и выступающие в качестве счетчиков 75, будут использоваться для определения синхронизирующих измерений для канальных пар A-C и B-C соответственно.
Синхронизирующий счетчик 78 используется для подсчета частотных значений, выдаваемых входным контуром 42 устройства RTD для выбранного аналогового входного сигнала, который подается сюда через переключатель 35. Этот счетчик устанавливается в исходное положение логическим контуром управления 72 перед каждым интервалом преобразования посредством подачи соответствующего сигнала в провод 79.
Логический контур управления 72 представлен хорошо известной комбинаторной и прочей логикой. После установки логического контура управления в исходное положение с конкретной длительностью (в циклах срабатывания трубки Вентури) интервалов переключения и установки на нуль этот контур будет генерировать по проводам 33 сигналы выбора 33, которые приводят в действие мультиплексор 31, который и будет выбирать и прокладывать маршрут прохождения сигналов соответствующих датчиков на входы либо канала A, либо канала B, чтобы канальные пары через свои режимы установки на нуль и измерения образовывали повторные и противоположно направленные циклы функционирования.
Кроме того, логический контур управления 72 также образует и выдает соответствующие управляющие сигналы, которые после прохождения по проводам 77 и 79 обеспечивают правильную установку счетчиков 74 и 76 в исходное состояние для каждого интервала синхронизации. Кроме того, этот логический контур управления образует и генерирует по проводам 34 соответствующие сигналы выбора, которые в коночном итоге поступают на вход управления (C) аналогового переключателя 35.
Эти сигналы выбора заставляют переключатель проложить маршрут прохождения какому-то специфическому одному из его входных напряжений, а именно напряжению устройства RTD, которое передается по проводу 195, или одному из двух эталонных напряжений (Vref 1 или Vref 2, которые соответственно равны 0 и 1,9 В), до входа входной схемы 41 устройства RTD для последующего преобразования с помощью расположенного здесь же преобразователя напряжение частота.
Эталонное напряжение Vref2 подается по проводу 38 от генератора эталонного напряжения 39, в котором расположен хорошо известный источник стабильного напряжения, который демонстрирует лишь очень незначительный дрейф в результате колебания температуры.
Ниже более подробно и с ссылками на стандартную процедуру обработки данных по температуре устройства RTD (стандартная процедура 1100, фиг.15) будет описан принцип работы преобразователя напряжение частота, основной функцией которого является преобразование каждые 0,1 с каждого одного из восьми аналоговых напряжений (в данном описании показаны и кратко описаны только те напряжения, которые имеют прямое отношение к настоящему изобретению), которые затем подаются на вводы (I0, I1, I2 для трех указанных напряжений) выбранного в данный момент аналогового переключателя 35, с последующим их преобразованием каждые 0,8 с в соответствующее значение частоты. Контур логического управления и регулирования 72 точно устанавливает, какое одно из входных напряжений на аналоговом переключателе 35 необходимо выбрать в данный конкретный момент.
Ниже более детально описываются состояния схемы 70 в связи с рассмотрением особенностей таблицы состояний 400 и схемы синхронизации 500, которые показаны соответственно на фиг. 6 и 7.
Поскольку схема 70, благодаря своим разным состояниям (в данном случае нас интересуют только восемь ее состояний), образует и использует различные циклы, то в течение одного из этих циклов схема будет записывать значение своего текущего состояния во внутренний регистр (не показан), который после обращения к нему со стороны микрокомпьютера 80 посылает это значение по проводам 85. После этого микрокомпьютер считывает это значение, которое дает ему возможность хотя бы предварительно обработать подсчитанные значения, которые были переданы счетчиками 75 и 78 через соответствующие внутренние регистры (не показаны) и по проводам 87 и 88.
По проводам 87 в микрокомпьютер 80 для канальных пар A-C и B-C передаются предварительные результаты синхронных измерений, которые обозначены RAW_ RATE_A и RAW_RATE_B соответственно. В зависимости от режима функционирования каждой канальной пары измерения RAW_RATE_A и RAW_RATE_B будут выдавать для каждой канальной пары (в виде подсчетов) одиночный результат измерения междуканальной фазовой разности или одиночное значение Δt.
По проводам 88 в микрокомпьютер поступают данные о подсчитанных результатах измерения подсчитанной частоты для напряжений устройства RTD и эталонного напряжения. Кроме того, логический контур управления 72 будет также записывать какое-то значение в другом внутреннем регистре (специально не показан), который точно устанавливает, какое затем аналоговое напряжение будет выбрано аналоговым переключателем 35 для преобразования с помощью входной схемы 42 устройства RTD. Это значение также считывается микрокомпьютером 80 через провода 85.
Кроме того, микрокомпьютер посылает соответствующие сигналы по проводам 84 для управления режимом работы схемы 70. Микрокомпьютер посылает также по проводам 82 соответствующие сигналы адресов для выделения логическому контуру управления 72 какого-то специфического внутреннего регистра, из которого микрокомпьютер будет считывать данные и в котором он же будет записывать данные.
Через провода 91 и 93 микрокомпьютер соединен также с хорошо известной выходной схемой 90, которая образует ряд стандартных выходных устройств через провода 26 (на чертежах показаны, например, интерфейс или интерфейсы дисплея, коммуникационные порты, выводной провод 263 с силой тока 4-20 мА и выводной провод 262 масштабированной частоты), а также с хорошо известной схемой 95, которая связывает измерительный прибор с несколькими хорошо известными входными устройствами (например, переключатели, малые клавишные приставки пользователя, коммуникационные порты и т.д.).
Микрокомпьютер 80 использует любой один из хорошо известных выпускаемых в настоящее время серийно микропроцессоров (специально не показан) вместе с памятью с произвольной выборкой (RAM) 83 для хранения данных и с постоянной памятью (ROM) 86 для хранения программ и констант.
Поскольку эта программа использует управляемую прерыванием архитектуры задачу, то база данных расположена в пределах микрокомпьютера, чтобы облегчить передачу и совместное использование измеренных и рассчитанных данных среди различных задач. На основе своей входной информации, особенно о результатах измерения синхронизации, которая содержит результаты измерения междуканальной фазовой разности и значения Δt для каждой пары каналов, и на основе информации о подсчитанной частоте наряду с информацией о состоянии, причем вся эта информация подается через схему 70, микрокомпьютер 80 будет соответствующим образом корректировать измеренные значения (полученные каждой канальной парой), чтобы получить данные об измеренной внутренней фазовой задержке, определять точный и скорректированный на колебание температуры коэффициент измерительного прибора, а затем с помощью скорректированных значений Δt и упомянутого фактора будет определять значения текущей скорости потока или удельного массового расхода жидкости, причем все эти данные анализируются более детально ниже в связи с рассмотрением показанного на фиг.8 главного контура измерения потока жидкости 600, показанной на фиг.9 и 10 стандартной программы определения нуля 700, показанной на фиг.11 и 12 стандартной программы отметки механического нуля 800 и показанной на фиг.15 стандартной программы обработки данных о температуре устройства RTD 1100.
Чтобы лучше понять принципы взаимодействия между схемой 70 и микрокомпьютером 80, ниже более детально рассмотрим схему синхронизации 400 и таблицу состояний, показанных на фиг.5, 6 и 7, которые совместно дают детализированную информацию относительно выполняемых схемой 70 функций и их временных связях.
Схема синхронизации (фиг. 5, 6) определяет нормальные последовательные модальные операции для каждой канальной пары и временных связей между ними.
Как уже упоминали выше, каждая канальная пара A-C и B-C работает либо в режиме измерения, либо в нулевом режиме. В то время как одна канальная пара работает в режиме измерения, другая будет находиться в нулевом режиме, причем в конце этих режимов канальные пары меняют режим работы на обратный. Длительность каждого из этих режимов работы "модальный" интервал всегда будет одинаковой, т.е. будет равна длительности t.
В этом отношении нулевой режим 410 для канальной пары A-C и режим измерения 420 для канальной пары B-C будут происходить одновременно с режимом измерения 440 и нулевым режимом 450, с нулевым режимом 470 и режимом измерения 480 для канальных пар A-C и B-C соответственно. Стрелки 430, 460 и 490 обозначают направления изменения режимов на обратное между канальными парами в точке завершения трех последовательных модальных интервалов.
В канал C непрерывно подается сигнал от левого датчика скорости (L) и этот канал выступает в качестве эталонного канала, по отношению к которому будет непрерывно измеряться внутренняя фазовая задержка каждого из двух других каналов. Однако подаваемые в неэталонные каналы A и B входные сигналы будут переключаться в зависимости от режима работы соответствующих канальных пар A-C и B-C между сигналами от левого и правого датчиков скорости на основе результатов измерения фазовой разности, которые выполняются для каждой иной входной конфигурации, чтобы выдать для каждой канальной пары результаты измерения междуканальной фазовой разности или значения Δt.
В частности, в процессе работы какой-то канальной пары в режиме измерения неэталонный канал этой пары, например, канал B в канальной паре A-C, будет принимать сигнал от правого датчика скорости и будут выполняться измерения междуканальной фазовой разности, которая имеет место в этой канальной паре. Эти измерения дают основу для получения предварительных, основанных на расходе жидкости, значений Δt. Эти измерения происходят на всем протяжении интервала t, т.е. в течение периода, когда канал находится в режиме измерения.
В течение этого периода результаты измерений подаются в микрокомпьютер для последующей обработки с конечной выдачей соответствующих значений удельного массового расхода жидкости.
В противоположность этому в течение нулевого режима любая канальная пара, например пара B-C, будет выполнять следующие четыре индивидуальные функции:
а) переключать ввод для неэталонного канала этой пары с сигнала от правого на сигнал от левого датчика скорости в течение интервала переключения;
б) выполнение измерений внутренней фазовой задержки для этой канальной пары (т. е. процедуры "установки на нуль") в течение интервала установки на нуль;
в) повторное переключение входа неэталонного канала на сигнал от правого датчика скорости в течение интервала переключения и
г) обеспечение "активности" этой пары в течение интервала установки на нуль, в течение которого можно будет выполнять измерения основанных на расходе жидкости значений Δt.
Поскольку противоположная канальная пара, например пара A-C, будет активно измерять основанные на расходе жидкости значения Δt в течение своего интервала измерения, когда канальная пара B-C является активной, оба канала имеют возможность одновременно выдавать основанные на расходе жидкости значения Δt для одних и тех же сигналов датчиков скорости в течение этого интервала "активности".
Если необходима дополнительная проверка возможного появления ошибки, тогда микрокомпьютер может обработать представленные "активной" канальной парой результаты измерений и сравнить результирующие скорректированные значения Δt с теми, которые были получены другой канальной парой. Довольно большое расхождение между этими значениями будет указывать на наличие ошибки.
Каждый интервал переключения (фиг. 5, 6) равен по длительности 16 циклам срабатывания трубки, тогда как каждый интервал установки на нуль происходит на протяжении 2048 последовательных циклов срабатывания трубки. Следовательно, образованная из двух перемеживающихся интервалов переключения и установки на нуль длительность t равна 4128 циклам срабатывания трубки.
В течение установки измерительного прибора в исходное состояние микрокомпьютер 80 вводит длительности (на основе циклов срабатывания трубки) интервалов переключения и установки на нуль в схему 70 и, в частности, в расположенный в этой схеме логический контур управления 72.
Как это ясно из представленной на фиг.7 таблицы состояний 500 для схемы 70, эта схема при нормальных условиях работы будет непрерывно совершать циклы с использованием восьми состояний в определенной последовательности, причем эти состояния обозначены ссылочными позициями 26, 46, 26, 66, 6 A, 6 C, 6 A и 6 E, из которых два состояния, а именно состояния 26 и 6 A, повторяются.
Каждое из этих состояний существует в течение фиксированной длительности, т. е. либо в течение интервала переключения, либо в течение интервала установки на нуль. В течение всех восьми состояний сигнал от левого датчика скорости будет непрерывно подаваться на вход эталонного канала C.
В течение первых четырех состояний (состояния 26, 46, 26 и 66) канальная пара A-C работает в режиме измерения (ниже будем просто называть режим измерения канала A), тогда как канальная пара B-C будет непрерывно работать в своем нулевом режиме (ниже будем просто называть нулевой режим канала B).
На протяжении всего режима измерения канала A схема 70 генерирует низкий уровень по сигналу выбора мультиплексора RPO_A, чтобы сигнал правого датчика скорости непрерывно подавался на вход канала A. В течение этого режима, что и обозначено буквой X, канальная пара A-C выдает основанные на расходе жидкости значения Δt, а следовательно будет выполнять функцию измеряющей канальной пары.
Кроме того, в самом начале состояния 26 схема 70 начинает функционирование нулевого режима канала B посредством первоначальной подачи высокого уровня в сигнал выбора мультиплексора RPO_B, чтобы осуществить первое переключение ввода канала B с сигнала от правого на сигнал от левого датчика скорости. Это будет инициировать установку переключающего состояния 26 канала B, в течение которого канальная пара B-C не выполняет никаких измерений, а лишь позволяет себе установить адекватный период времени, т.е. интервал переключения tSW, для стабилизации всех переходных состояний переключения и прочих подобных же пертурбаций в канале B.
После окончания этого состояния схема 70 вызывает образование состояния 46 установки на нуль канальной пары B-C. В течение этого состояния 46, продолжительность которого равна интервалу установки на нуль tZERO, схема 70 будет непрерывно выполнять измерения междуканальной фазовой разности для канальной пары B-C.
Результаты этих измерений считываются и усредняются микропроцессором, чтобы выдать окончательный результат измерения (в виде количества подсчетов) внутренней фазовой задержки для упомянутой канальной пары. После завершения интервала установки на нуль еще раз устанавливается состояние 26 (состояние переключения канала B), чтобы можно было переключить вход канала B с сигнала от левого датчика скорости вновь на сигнал от правого датчика скорости.
При выполнении этой функции схема 70 будет генерировать низкий уровень по сигналу выбора мультиплексора RPO_B. И в данном случае продолжительность этого состояния, в течение которого на канальной паре B-C не проводится никаких измерений, будет равна длительности интервала переключения, чтобы дать возможность стабилизироваться всем переходным состояниям переключения и прочим пертурбациям в канале B.
После завершения состояния 26 возникает состояние 66 активное состояние обоих каналов для интервала установки на нуль, в течение которого оба канала будут "активными" и можно будет выполнять основанные на расходе жидкости измерения Δt, если, конечно, в этом есть необходимость, с помощью канальной пары B-C, причем эти измерения будут проводиться одновременно с измерениями с помощью канальной пары A-C.
После окончания состояния 66 происходит образование состояний 6 A, 6 C, 6 A и 6 E в последовательности, которая лишь гарантирует выполнение идентичных операций, но в противоположных канальных парах.
Все эти состояния повторяются несколько раз.
Ниже будут рассмотрены различные аспекты программного обеспечения для показанного на фиг.3 и 4 микрокомпьютера 80. Поскольку этот микрокомпьютер выполняет ряд распорядительных и управленческих функций, которые не имеют прямого отношения к настоящему изобретению, то с целью упрощения и сокращения нижеследующего описания опускается рассмотрение и анализ таких функций программного обеспечения, как функция администратора базы данных и соответствующего окружения рабочей системы для реализации основанной на какой-то конкретной задаче прикладной программы.
На фиг.6 показана упрощенная блок-схема главного контура измерения потока жидкости 600.
Показанная здесь стандартная программа включает в себя основные функции по измерению массового расхода жидкости.
После начала реализации стандартной программы 600 первым начинает функционировать блок 610, который будет считывать текущие исходные данные по результатам измерения фазовой разности (RAW_RATE_A и RAW_RATE_B), а также информацию о состоянии из схемы 70. В зависимости от существующего в данный момент режима работы каждой канальной пары каждые исходные данные RAW_RATE_A и RAW_ RATE_ B выдают (в подсчетах) либо одиночный результат измерения междуканальной фазовой разности, либо одиночное значение Δt.
После выполнения функции блоком программы 610 начинает выполнять свою функцию блок программы 620. Этот блок программы выполняет стандартную программу определения нуля 700, которая в ответ на исходные результаты измерения фазовой разности и информации о состоянии, о чем подробнее ниже, обрабатывает данные о фазовой разности для какой-то конкретной канальной пары, которая в данный момент функционирует в режиме измерения, например, основанное на расходе жидкости значение Δt, и обрабатывает также данные о фазовой разновидности для другой канальной пары, например, результаты измерения междуканальной фазовой разности.
Результаты этого измерения стандартная программа использует для определения значения отметки электронного нуля для этой последней пары. Отметка электронного нуля состоит из двух значений, а именно внутренней фазовой задержки, выраженной в тех же подсчетах, что и значение Δt и связанной с каждой из двух канальных пар.
Далее стандартная программа 700 будет определять отметку механического нуля для измерительного прибора Кариолиса. Отметка механического нуля представляет собой значение смещения в результатах измерения Δt, которые получают, о чем подробнее ниже, в течение условий нулевого потока, имеющих место в процессе калибрации измерительного прибора.
После завершения описанных выше операций стандартная программа 700 выполняет коррекцию текущего значения Δt, измеренного для канальной пары, работающей в режиме измерения, с помощью отметки механического нуля для данного измерительного прибора и с помощью самого последнего на данный момент значения отметки электронного нуля для этой же канальной пары, причем значение отметки электронного нуля уже было ранее установлено в тот момент, когда эта канальная пара последний раз работала в своем нулевом режиме.
После полного исполнения стандартной программы 700, исполнение переходит от блока программы 620 к блоку 630. В момент исполнения этого последнего блока программы происходит фильтрование порученного блоком программы 620 скорректированного значения Δt, причем это фильтрование осуществляется двухполюсным фильтром программного обеспечения и преследует цель удаление помех и шумов с конечной выдачей текущего отфильтрованного значения Δt.
Затем начинается исполнение блока программы 640, который рассчитывает текущие объемные и удельные массовые расходы жидкости с использованием текущего отфильтрованного значения и скорректированного на колебание температуры коэффициента расхода жидкости. Этот температурный коэффициент обновляется на периодической основе с помощью стандартной программы обработки данных о температуре устройства RTD 1100, которая будет реализоваться на основе прерывания.
После завершения исполнения блока программы 640 начинается исполнение блока программы 650. Этот последний блок программы проверяет значения объемного и удельного массового расхода относительно соответствующих предельных условий низкого расхода жидкости, и если эти условия не отвечают требованиям, тогда объемные и удельные массовые расходы жидкости временно устанавливаются на нуль.
После этого начинается исполнение блока программы 660, который в процессе своего исполнения будет хранить текущие значения объемного и удельного массового расхода жидкости в базе данных для последующего использования, например, для периодического обновления визуально воспроизводимой информации, суммированных показаний относительно расхода жидкости и/или выходных данных измерительного прибора. После этого исполнение возвращается к блоку стандартной программы 610 и т.д.
Стандартная программа содержит четыре индивидуальные секции: стандартную программу определения отметки электронного нуля 710, стандартную программу компенсирования отметки электронного нуля 760, стандартную программу определения отметки механического нуля 780 и стандартную программу компенсирования отметки механического нуля 790 (фиг.9, 10).
Как уже упоминали выше, стандартная программа 700 (через свой блок 710) определяет текущее основанное на расходе жидкости значение Δt для той канальной пары, которая в данный момент работает в режиме измерения, и определяет также текущее значение отметки электронного нуля для другой канальной пары, которая в данный момент работает в нулевом режиме. Стандартная программа 760 компенсирует каждое текущее измеренное значение Δt от канальной пары, которая в данный момент работает в режиме измерения, на самое последнее значение отметки электронного нуля для этой канальной пары.
Стандартная программа 780 определяет отметку механического нуля для измерительного прибора. И, наконец, блок стандартной программы 790 корректирует основанное на расходе жидкости значение Δt для канальной пары, которая в данный момент работает в режиме измерения на значение отметки механического нуля для измерительного прибора.
Следует иметь в виду, что после введения в стандартную программу 700 и особенно в блок программы 710 исполнение стандартной программы начинается в блоке принятия решения 703. Этот блок программы определяет, будет ли значение переменного STATE (состояние) указывать на то, что канальная пара A-C находится в состоянии установки на нуль, т.е. состояние схемы 70 будет идентично состоянию 6 C.
Это значение образуется схемой 70 после запроса со стороны микропроцессора 80 (фиг.3 и 4). В случае, если в данный момент устанавливается именно это состояние, тогда исполнение программы переходит к блоку программы 706, что и показано на фиг.9 и 10 стрелкой (YES), отходящей от блока принятия решения 703.
При выполнении своей функции этот последний блок программы будет обновлять значение суммированной переменной расхода жидкости (TOTAL_RATE) с использованием текущего значения RAW_RATE_A. Как это четко видно в конце интервала установки на нуль, упомянутое суммированное значение расхода жидкости устанавливается равным нулю. После этого начинается исполнение блока программы 709, в результате чего состояние временного флага (TEMP_STATE) устанавливается на значение установки канала A на нуль (ZEROING_CHANNEL_A), которое указывает на то, что в данный момент канальная пара A-C находится в режиме установки на нуль.
После того, как это произошло, исполнение переходит к блоку программы 712, который лишь приращивает значение счетчика контура (COUNTER) на единицу. Исполнение программы затем переходит к блоку программы принятия решения 730. С другой стороны, в случае, если текущее значение переменного состояния (STATE) указывает на то, что канальная пара A-C не находится в режиме установки на нуль, тогда исполнение программы переходит от блока принятия решения 715, о чем свидетельствует стрелка NO, отходящая от блока принятия решения 703.
Блок принятия решения 715 проверяет состояние временного флфга, чтобы определить, закончен или нет режим установки на нуль для канальной пары A-C, т. е. будет ли все еще значение этого флага равно установке на нуль канала A (ZEROING_ CHANNEL_ A). В случае, если режим установки на нуль уже закончен именно для этой канальной пары, тогда начинается исполнение блока программы принятия решения 715, который принимает решение проложить маршрут к блоку программы 718, используя при этом свой маршрут YES.
В момент исполнения блока программы 718 он будет расчитывать значение отметки электронного нуля для канальной пары A-C, т.е. ELECT_ZERO_A, в качестве среднего значения индивидуальных измерений, которые уже были суммированы, и особенно значения переменного TOTAL_RATE (суммарный расход), поделенного на содержание счетчика циклов COUNTEP.
После выполнения этой процедуры исполнение программы переходит к блоку 721, который устанавливает значение временного флага на другое значение, в данном случае на значение NOT_ZERO_CHANNEL_A (канал A не устанавливается на нуль), которое означает, что канальная пара A-C не находится в режиме установки на нуль.
После этого исполнение программы переходит к блоку 724, который лишь повторно устанавливает значения как счетчика циклов, так и переменной суммированного расхода жидкости на нуль. После этого исполнение программы переходит к блоку 730 (блок принятия решения). С другой стороны, исполнение программы переходит также к этому блоку принятия решения (через указанный стрелкой NO маршрут, отходящей от блока принятия решения 715) в том случае, если вообще нет канальной пары A-C и еще не закончен полностью режим установки на нуль.
Блоки программы с 730 по 751 выполняют те же операции, что и блоки 703-724, но для определения значения отметки электронного нуля для канальной пары B-C, т. е. выполняют функцию ELECT_ZERO_B. В более узком смысле блок принятия решения 730 определяет, указывает ли значение переменного STATE (состояние) на то, что канальная пара B-C находится в режиме установки на нуль, т.е. состояние схемы 70 выражается через значение 46.
В случае, если упомянутого состояния нет (в данный момент), тогда исполнение программы переходит в соответствии со стрелкой YES, отходящей от блока принятия решения 730 (фиг.10 и 11), к блоку 733. После запуска в работу этого последнего он будет обновлять значение суммированной переменной расхода жидкости TOTAL_RATE с использованием текущего значения RAW_RATE_B.
При завершении интервала установки на нуль упомянутое суммирование значения расхода жидкости устанавливается равным нулю. Затем исполнение блока программы 736 будет устанавливать состояние временного флага TEMP_ STATE на значение ZEROING_CHANNEL_B установка канала B на нуль), которое будет означать, что в данный момент канальная пара B-C находится в режиме установки на нуль. После завершения этого этапа исполнения программы начинает функционировать блок программы 739, который лишь приращивает значение счетчика циклов COUNTER на единицу. Затем исполнение переходит к стандартной программе 760.
С другой стороны, в случае, если текущее значение переменного STATE указывает на то, что канальная пара B-C не находится в режиме установки на нуль, тогда исполнение программы переходит по направлению стрелки NO, которая отходит от блока принятия решения 730 к блоку принятия решения 742.
Этот блок принятия решения будет проверять состояние временного флага, чтобы определить, закончится или нет режим установки на нуль для канальной пары B-C, т.е. будет ли значение этого флага все еще равно значению ZEROING_ CHANNEL_ B. В случае, если режим установки на нуль для этой канальной пары только что закончился, тогда исполнение программы от блока принятия решения 742 передается в указанном стрелкой YES направлении к блоку 745.
После начала функционирования этого блока он будет рассчитывать значение отметки электронного нуля для канальной пары B-C, т.е. ELECT_ZERO_B (отметка электронного нуля для канала B), в качестве простого среднего значения индивидуальных измерений, результаты которых уже были суммированы, в частности значения переменного TOTAL_RATE, деленного на содержимое счетчика циклов COUNTER.
После завершения этого этапа исполнение программы переходит к блоку 748, который и будет устанавливать значение временного флата на другое значение, в данном случае на NOT_ZEROING_CHANNEL_B (канал B не устанавливается в состояние нуля), которое означает, что канальная пара B-C не находится в режиме установки на нуль.
После этого исполнение программы переходит к блоку 751, который лишь повторно устанавливает значения как счетчика циклов, так и переменной суммированного расхода жидкости на нуль. После этого исполнение переходит к стандартной программе 760.
С другой стороны, исполнение также переходит к упомянутой стандартной программе в том случае, если канальной пары B-C вообще нет, а режим установки на нуль не был закончен, т.е. исполнение переходит в направлении стрелки NO, отходящей от блока принятия решения 742. На этом этапе завершается исполнение стандартной программы 710.
Поскольку в какой-то один момент времени одна из канальных пар будет функционировать в своем нулевом режиме, однако в этот же момент происходит определение текущего значения соответствующей переменной ELECT_ZERO_A или ELECT_ZERO_B (отметки электронного нуля для канала A или для канала B).
Стандартная программа компенсирования отметки электронного нуля 760 будет лишь корректировать (компенсировать) результат текущего измерения Δt на значение отметки электронного нуля для какой-то специфической канальной пары, которая выдает результаты этого измерения. В более узком смысле после вхождения в эту стандартную программу исполнение переходит к блоку принятия решения 763, который на основе информации о том, какая канальная пара (B-C или A-C) в данный момент работает в своем режиме измерения, будет соответствующим образом передавать исполнение программы либо блоку 767, либо блоку 769. Если исполнение программы передается блоку 767, тогда этот блок в ходе исполнения программы будет вычитать значение отметки электронного нуля для канальной пары B-C из значения RAW_RATE_B и будет хранить полученный результат в переменной Δt.
С другой стороны, если исполнение программы передается блоку 769, тогда в ходе исполнения программы этот блок будет вычитать значение отметки электронного нуля для канальной пары A-C из значения RAW_RATE_A и хранить полученный результат в переменной Δt. После завершения исполнения программы либо блоком 767, либо блоком 769 начинается этап исполнения стандартной программы определения отметки механического нуля 780.
Стандартная программа 780 определяет текущее значение отметки механического нуля для измерительного прибора. В более узком смысле после запуска стандартной программы 780 в исполнение первый этап ее реализации начинается в блоке принятия решения 781. В ходе исполнения программы этим блоком прежде всего принимается решение с необходимости нахождения текущего значения отметки механического нуля. Как уже отмечали выше, отметка механического нуля устанавливается в условиях отсутствия потока жидкости в процессе калибрации измерительного прибора.
Если в данный конкретный момент происходит калибрация измерительного прибора, и если пользователь сообщает простым нажатием соответствующей кнопки, расположенной на электронном блоке измерительного прибора, об отсутствии какого-либо потока жидкости, тогда блок принятия решения 781 передает исполнение программы блоку 784 по направлению стрелки YES.
Этот блок исполняет стандартную программу определения отметки механического нуля 800, о чем подробнее ниже, с целью конечного определения текущего значения отметки механического нуля (MECH_ZERO) для измерительного прибора. После определения этого значения исполнение переходит к стандартной программе корректирования механического нуля 790.
Исполнение стандартной программы 790 происходит также (в направлении стрелки NO, отходящей от блока принятия решения 781) в том случае, если не происходит калибрации измерительного прибора или в момент, когда пользователь еще точно не установил, что через прибор не проходит никакая жидкость.
Стандартная программа определения отметки механического нуля 790 содержит блок программы 792, в ходе исполнения которого этот блок будет лишь вычитать текущее значение отметки механического нуля MECH_ZERO из значения переменной Δt, причем конечный результат будет выражаться в результатах измерения скорректированного значения Δt, которое затем фильтруется и используется главным контуром 600 (а конкретно блоками 630 и 640, показанными на фиг. 8) для определения текущего значения удельного массового расхода потока жидкости.
После завершения исполнения программы блоком 792 прекращается исполнение стандартных программ 790 и 700 (фиг.10 и 11) и начинается исполнение главного цикла измерения потока 600.
Чтобы несколько упростить используемое в данном случае программное обеспечение, стандартная программа 700 не включает в себя соответствующее программное обеспечение для определения соответствующих скорректированных значений Δt для обеих канальных пар в течение каждого "активного" интервала и, как уже упоминали выше, сравнивает полученные результаты, чтобы иметь возможность выявить достаточные различия между ними, а также связанные с этим системные ошибки и погрешности.
Любой специалист в данной области может легко и просто модифицировать стандартную программу 700 и включить в нее это программное обеспечение.
Стандартная программа 800 определяет текущее значение отметки механического нуля самого измерительного прибора.
В принципе, об этом также упоминали выше, текущее значение этого нуля определяется прежде всего путем вычисления стандартного отклонения δΔt значений Δt, полученных для условия отсутствия потока жидкости в процессе калибрации измерительного прибора.
Это стандартное отклонение является критерием помех, которые появляются при измерении Δt в условиях отсутствия потока жидкости. Только если помехи будут достаточно незначительными, т.е. если значение стандартного отклонения будет ниже минимального порогового уровня, становится возможным обновить самое последнее значение механического нуля, чтобы затем можно было отразить его текущее значение; в противном случае это текущее значение просто игнорируется.
Количество измеренных значений Δt, используемых в процессе определения стандартного отклонения, регулируется одним из следующих трех критериев:
а) когда "работающее" стандартное отклонение становится ниже предела сходимости,
б) пользователь заканчивает этап установления механического нуля простым нажатием соответствующей кнопки или
в) если уже использовано заданное количество измеренных значений Δt.
Кроме того, выполняются необходимые проверки пределов, чтобы убедиться в том, что текущее значение отметки механического нуля находится в пределах установленных границ, и только после этого можно заменять самое последнее его значение текущим его значением.
В данном случае после вхождения в стандартную программу 800 ее исполнение переходит к блоку принятия решения 803. В ходе исполнения программы этим блоком он будет проверять состояние флага (ZERO STATE нулевое состояние), чтобы иметь возможность точно установить, происходит ли в данный момент процесс определения механического нуля. Этот флаг устанавливается соответствующим программным обеспечением (не показано) с целью начала упомянутого процесса.
В случае, если в данный момент происходит выполнение этого процесса, тогда блок принятия решения 803 передает дальнейшее исполнение программы блоку 806 в направлении стрелки YES. в процессе исполнения программы этим блоком происходит обновление значения суммированной переменной (ZERO_TOTAL) с использованием текущего значения Δt. Из дальнейшего станет ясно, что это суммированное значение устанавливается равным нулю в момент завершения интервала установки на нуль.
После завершения исполнения программы блоком 806 дальнейшее ее исполнение переходит к блоку 809, который будет увеличивать содержание счетчика циклов (ZERO_COUNT) на единицу. После этого исполнение программы переходит к блоку 820. С другой стороны, если значение отметки механического нуля в данный момент не поддается определению, т.е. в данный момент статус флага ZERO_ STATE не является активным, тогда исполнение программы переходит к блоку 812 по направлению стрелки NO, отходящей от блока принятия решения 803.
Блок 812 повторно устанавливает флаг ZERO_STATE в активное состояние, устанавливает на нуль значения как ZERO_TOTAL, так и счетчика циклов - ZERO_ COUNT и устанавливает значение переменной MIN_STD_DEV на большую заданную цифру (точное значение которой не является критическим в течение всего периода, пока она будет превышать ожидаемое значение стандартного отклонения).
После этого блок 816 устанавливает все флаги ошибки в исходное состояние (имеются в виду флаги, которые связаны с процессом определения отметки механического нуля). После этого исполнение программы переходит к блоку принятия решений 820.
В момент исполнения программы блоком принятия решений 820 он устанавливает, имело ли место минимальное количество измеренных значений Δt, чтобы иметь возможность определить значение механического нуля, т.е. для данного случая определить, превышает ли текущее значение счетчика циклов - ZERO_ COUNT заданное минимальное значение MIN_ZERO_COUNT, которое обычно равно десятичному значению 100.
В случае, если имело место недостаточное количество значений Δt, тогда исполнение от стандартной программы 800 прекращается и передается по направлению стрелки 872 и стрелки NO 822, отходящей от блока принятия решении 820. С другой стороны, если уже имело место минимальное количество значений Δt, тогда блок принятия решений 820 передает дальнейшее исполнение программы блоку 823 по направлению стрелки YES.
В момент исполнения программы этим блоком он будет обновлять стандартное отклонение δ значений Dt, которые в данный момент уже измерены и используются для определения значения отметки механического нуля, а также будет хранить этот результат в переменной стандартного отклонения STD_DEV. После выполнения этой процедуры исполнение программы передается блоку принятия решений 826, который проверяет конечное значение стандартного отклонения относительно его минимального значения.
В случае, если конечное значение стандартного отклонения будет меньше минимального значения, тогда блок принятия решений 826 передает исполнение программы блоку 829 в направлении стрелки YES. Этот последний будет рассчитывать временное текущее значение механического нуля (MECH_ZERO_TEMP), которое будет средним значением суммированных значений Δt, которые были получены до сих пор в течение процесса определения текущего значения механического нуля, т.е. значение ZERO_TOTAL, деленное на содержание счетчика циклов ZERO_ COUNT.
После того, как это произошло, блок 829 устанавливает минимальное значение стандартного отклонения равным текущему значению стандартного отклонения. Благодаря этому можно будет всегда использовать описанным ниже способом минимальное значение стандартного отклонения, которое было найдено в течение процесса определения текущего механического нуля для установления факта, является ли текущее значение механического нуля слишком приближенным, а следовательно и не приемлемым.
После полного завершения блоком 829 своей функции исполнение программы передается блоку принятия решений 832. С другой стороны, исполнение программы этому блоку принятия решения передается также и в том случае, если текущее значение стандартного отклонения не будет равно или будет превышать свое минимальное значение, причем эта передача происходит в направлении стрелки NO, отходящей от блока принятия решений 826.
К этому моменту с помощью блоков принятия решений 832, 836 и 840 были последовательно проведены три индивидуальные проверки с целью определения, было ли использовано достаточное количество измеренных значений Δt для определения текущего значения механического нуля. Подобные измерения продолжаются до момента достижения достаточного количества измерений. В частности, блок принятия решений 832 определяет, не будет ли текущее значение стандартного отклонения меньше предела сходимости.
В данном случае, если стандартное отклонение уменьшается с каждым последовательным значением Δt и уже упало ниже заданного предельного значения, тогда практически исключается, что какие-то дополнительные измерения будут оказывать отрицательное влияние на значение механического нуля.
Следовательно, если стандартное отклонение уже уменьшилось описанным выше образом, тогда блок принятия решений 832 передает дальнейшее исполнение программы в указанном стрелкой YES направлении блоку принятия решений 843. С другой стороны, если текущее значение стандартного отклонения все еще будет выше предела сходимости, тогда исполнение программы передается в указанном стрелкой NO направлении блоку принятия решений 836 (упомянутая стрелка отходит от блока принятия решений 832).
Блок принятия решений 836 устанавливает, нажал ли пользователь какую-то кнопку или каким-то иным образом выдал соответствующую индикацию в измерительный прибор, чтобы закончить текущий процесс определения механического нуля. В случае, если пользователь закончил выполнение этого процесса, тогда блок принятия решений 836 передает дальнейшее исполнение программы в указанном стрелкой YES направлении блоку принятия решений 843.
С другой стороны, если пользователь не закончил выполнение текущего процесса определения механического нуля, тогда блок принятия решений 836 передает дальнейшее исполнение программы в указанном стрелкой NO направлении блоку принятия решений 840. В процессе исполнения программы блоком принятия решений 840 он будет устанавливать, было ли выполнено максимальное количество MAX_COUNT измеренных значений Δt. Если это максимальное количество, например 2000, измерений было выполнено, тогда блок принятия решений 840 передает исполнение программы в указанном стрелкой YES направлении блоку принятия решений 843.
С другой стороны, если максимальное количество измерений не было выполнено, тогда исполнение программы отходит из стандартной программы 800 по направлению отходящей от блока принятия решений 840 стрелки NO 841 и через путь 872, чтобы соответствующим образом обработать следующее последовательное измерение Δt.
На этом этапе исполнения стандартной программы 800 текущее значение, пусть и временное, для отметки механического нуля определялось на основе достаточного количества последовательных измерений Δt. Теперь блоки принятия решений 843, 846 и 849 будут определять, находится ли это значение механического нуля в рамках заданных пределов, например в пределах ±3 мкс, и является ли это значение механического нуля относительно свободным от помех.
На этом этапе блок принятия решений 843 устанавливает, будет ли текущее временное значение механического нуля меньше нижнего предела, т.е. меньше 3 мкс. В случае, если этот предел превышен в отрицательном направлении, тогда блок принятия решений 843 передает исполнение программы в указанном стрелкой YES направлении блоку 854.
Поскольку это означает ошибочное условие, то в момент исполнения программы блоком 854 он будет устанавливать значение соответствующего флага ошибки, т.е. MECHANICAL ZERO TOO LOW (механический нуль слишком мал), на истинное значение. С другой стороны, если нижний предел не превышен в отрицательном направлении, тогда блок принятия решений 843 передает дальнейшее исполнение программы блоку принятия решений 846 в направлении, указанном стрелкой NO.
Этот последний блок будет определять, будет ли текущее значение временного механического нуля больше верхнего предела, т.е. больше 3 мкс. В случае, если этот предел превышен в положительном направлении, тогда блок принятия решений 846 передает дальнейшее исполнение программы блоку 859 в направлении, указанном стрелкой NO.
Поскольку это означает возникновение ошибочного состояния, то в момент исполнения программы блок 859 устанавливает значение соответствующего флага ошибки, например МЕХАНИЧЕСКИЙ НУЛЬ СЛИШКОМ ВЫСОК на истинное значение. Значения верхнего и нижнего пределов в ±3 мкс устанавливаются эмпирическим путем, поскольку они являются теми значениями, в пределах которых должны находиться все основанные на факте отсутствия потока значения для измерительных приборов, которые в настоящее время промышленность выпускает по лицензии, принадлежащей автору настоящего изобретения.
С другой стороны, если ни один из упомянутых пределов не превышен, тогда блок принятия решений 846 передает исполнение программы блоку принятия решений 851 в направлении, указанном стрелкой NO. Этот последний блок будет определять, является ли временное значение механического нуля в достаточной степени свободным от каких-либо погрешностей, т.е. обладают ли все последовательные значения Δt, которые используются для генерирования этого значения, меньшей изменчивостью, чем какая-то конкретная изменчивость, причем это делается на основе сравнения настоящего значения минимального стандартного отклонения с пределом, равным заданному кратному целого числа (п) (обычно двум) предела сходимости.
Следует иметь в виду, что при приближении стандартного отклонения к своему минимальному значению отмечена тенденция появления наиболее повторяемого значения механического нуля. Можно предположить, что подобная тенденция напрямую связана с тем фактом, что измеренные значения Δt будут нарушаться периодическими шумами или помехами, например фоном переменного тока 60 Гц и его гармониками, что отрицательно влияет на частоту дискретизации сигналов от датчиков скорости (т.е. счетчики 75 считываются один раз через каждый цикл возбуждения трубки), в результате чего происходит образование частот биения, которые в конечном итоге появляются в измеренных значениях Δt.
Можно ожидать, что в нормальных условиях какие-то помехи этого типа будут присутствовать всегда, хотя амплитуда этих помех обычно будет изменяться от прибора к прибору. Для всего диапазона измерительных приборов, выпускаемых по лицензии правопреемника настоящего изобретения, сигналы скорости имеют основные частоты в диапазоне от 30 до 180 Гц.
Амплитуда частот биения будет минимальной тогда, когда помехи совпадают по фазе с упомянутой скоростью дискретизации сигналов, и она будет повышаться по мере постепенного смещения по фазе относительно скорости дискретизации сигналов, что в конечном итоге приводит к более высокой степени изменчивости и большей вероятности появления помех в измеренных значениях Δt, когда через прибор не проходит никакой жидкости.
Следовательно, минимальное значение стандартного отклонения используют для определения факта, будет ли результирующее значение механического нуля иметь слишком большие помехи. В данном случае, если блок принятия решений 851 устанавливает, что минимальное стандартное отклонение превышает предел в "п" раз предел сходимости, тогда ясно, что текущее временное значение механического нуля имеет слишком много помех и его следует игнорировать.
Поскольку это фактически означает возникновение состояния ошибки, то блок принятия решений 851 передает дальнейшее исполнение программы блоку 862 в направлении стрелки YES. Этот последний в процессе исполнения программы будет устанавливать значение соответствующего флага ошибки, например MECHANICAL ZERO TOO NOISY (механический нуль имеет слишком много помех), на истинное значение.
С другой стороны, если минимальное стандартное отклонение будет достаточно низким, а следовательно будет указывать на то, что временное значение механического нуля относительно свободно от помех, тогда блок принятия решений 851 передает исполнение программы блоку 865 по направлению стрелки NO. Этот последний обновляет значение механического нуля, MECH_ZERO, которое в данный момент равно значению временного механического нуля - MECH_ZERO_TEMP.
После исполнения блоками 854, 859, 862, или 865 своей части программы дальнейшее ее исполнение переходит к блоку 870, который в свою очередь устанавливает состояние флага ZERO_STATE в неактивное состояние, чтобы указать на то, что процесс определения значения механического нуля закончен и в данный момент эта проблема снята. После того, как это произошло, прекращаются какие-либо операции по исполнению стандартной программы 800.
Исходя из описанных выше результатов процесса определения отметки механического нуля, теперь можно смело переходить к описанию связанных с упомянутым выше процессом операций по установке на нуль, которые схематически показаны на фиг.13 и которые происходят для каждого соответствующего диапазона стандартного отклонения δΔt, которое может иметь место в ходе реализации упомянутых операций.
В данном конкретном случае всякий раз, когда значение δΔt лежит в пределах диапазона 910, а следовательно будет меньше предела сходимости (1), то будет тут же прекращаться операция установки на нуль и будет принято результирующее значение механического нуля. Для любого значения δΔt, лежащего в пределах диапазона 920, а следовательно и большего, чем предел сходимости, но меньшего в "п" раз этого предела, операция установки на нуль будет продолжаться до тех пор, пока не произойдет максимальное количество измерений Δt, причем само максимальное количество выражается через значение переменный MAX_ COUNT (максимальный подсчет). Это количество (в циклах возбуждения трубки) определяет максимальный интервал установки на нуль.
Для любого значения δΔt, которое находится в пределах диапазона 930, а следовательно будет превышать в "п" раз предел сходимости, операция установки на нуль будет тут же прекращаться. Связанное с этим текущее значение механического нуля будет просто не приниматься в расчет, а учитываться будет самое последнее значение.
На фиг. 14 схематически показаны диапазоны приемлемых и неприемлемых значений механического нуля. Из данных этого чертежа ясно, что ошибочными значениями механического нуля будут те значения, которые находятся либо в диапазоне 1020, а следовательно будут отрицательно большими по отношению к отрицательному пределу в -3 мкс, либо в диапазоне 1030, а следовательно будут положительно больше по отношению к положительному пределу в +3 мкс.
Если отметка механического нуля определяется, как имеющая любое из упомянутых значений, тогда это значение просто игнорируется. Принимаются только те значения механического нуля, которые находятся в пределах диапазона 1010, а следовательно они располагаются между отрицательным и положительным пределами.
На фиг. 15 показана блок-схема стандартной программы обработки данных о температуре устойчивого к температурным колебаниям устройства RTD 1100. Как уже упоминали выше, эта стандартная программа исполняется на периодически прерываемой основе, т.е. прерывается каждые 0,8 с и выдает преобразованное в цифровую форму значение температуры трубки Вентури, которое будет по существу нечувствительным к температурному дрейфу устройства RTD, причем на основе этого значения рассчитывается текущее значение скорректированного на температуру коэффициента измерительного прибора (RF). Затем это значение хранится в базе данных внутри микрокомпьютера для последующего использования стандартной программой 600 для определения текущего значения удельного массового расхода жидкости.
После введения в стандартную программу 1100 ее исполнение переходит к блоку 1110. В ходе исполнения этой программы упомянутый блок вынуждает аналоговый переключатель 35 прокладывать маршрут для напряжения устройства RTD к входу преобразователя напряжение частота 41 (фиг.3 и 4) для последующего преобразования последнего.
Чтобы более эффективно выполнить эту операцию, микропроцессор 80 посылает соответствующие сигналы адреса и управления по проводам 82 и 84 в схему 70 и, в частности, в расположенный в этой схеме логический контур управления 72. Эти сигналы в свою очередь дают команду логическому контуру послать по проводам 34 соответствующие сигналы выбора на аналоговый переключатель.
После выполнения этих операций и истечения соответствующего интервала подсчета показанный на фиг. 15 блок 1110 считывает содержание счетчика 78 (фиг. 3 и 4), в котором содержится подсчитанное значение, пропорциональное аналоговому напряжению устройства RTD с преобразованной частотой.
После этого, что хорошо показано на фиг.15, исполнение программы переходит к блоку 1120. В процессе исполнения программы этот блок фильтрует содержание, которое уже было считано из счетчика 78, с помощью двухполюсного фильтра программного обеспечения и хранит отфильтрованное значение во временной переменной V_TO_F (преобразование напряжение частота).
После того, как это произошло, блок 1130 начинает исполнение части программы с целью устранения из отфильтрованного значения значения нулевого смещения, чтобы выдать текущее значение частоты CURRENT_FREQ. Это значение нулевого смещения FREQ_ AT_OV, является ненулевым отфильтрованным подсчитанным значением выходного сигнала частоты, которое выдается преобразователем напряжение частота после подачи в него нулевого входного напряжения (Vref1).
После этого блок 1140 начинает исполнение программы с целью вычисления коэффициента пропорциональности FREQ_PER_C, который точно указывает количество подсчетов на каждый oC. Этот коэффициент можно выразить через разность в отфильтрованных подсчитанных значениях для двух эталонных напряжений (Vref1 и Vref2, которые на фиг.15 представлены потенциалом земли и напряжением в 1,9 В соответственно), деленных на десятичное число 380.
Поскольку подсчитанные значения частоты для обоих эталонных напряжений получают по существу одновременно с любым изменением в температуре трубки Вентури, поэтому любой температурный дрейф, образованный преобразователем напряжение частота, будет по существу вводить одинаковый компонент ошибки в оба подчитанных значения.
Поскольку коэффициент пропорциональности рассчитывается на основе разности между этими подсчитанными значениями, а не с помощью величины любого одного из этих значений, то значение коэффициента пропорциональности по существу не будет испытывать какого-либо влияния со стороны любого смещения в подсчитанном выходном сигнале напряжение частота, которое можно приписать температурному дрейфу.
Как значение нулевого смещения (FREQ_AT_OV), так и отфильтрованное подсчитанное значение эталонного напряжения в 1,9 В (FREQ_AT_1,9 В), определяют на периодической прерывистой основе с помощью другой стандартной программы (на чертежах не показана), но с тем же интервалом в 0,8 с. Эта стандартная программа, с которой хорошо знаком каждый специалист в данной области, вынуждает схему 70 посылать соответствующие сигналы выбора в аналоговый переключатель, чтобы сперва проложить маршрут прохождения на временное расположенной в шахматном порядке основе, либо для потенциала земли (Vref1), либо для эталонного напряжения в 1,9 В (Vref2) на вход в преобразователь напряжение частота 41 с последующим подсчетом значения частоты, образованного до и после считывания и фильтрации этого значения, и хранением отфильтрованных результатов.
После определения с помощью блока 1140 коэффициента пропорциональности исполнение программы переходит к блоку 1150. Этот последний рассчитывает текущую температуру (ТЕМР), которую считывает устройство RTD путем деления текущего значения частоты на коэффициент пропорциональности. После этого исполнение программы переходит к блоку 1160, который рассчитывает скорректированный на температуру коэффициент измерительного прибора RF, используя для этого значение коэффициента измерительного прибора и текущее значение температуры.
Для измерительного прибора Кариолиса его коэффициентом является хорошо известная константа, которую определяют эмпирическим путем в процессе изготовления прибора. После вычисления скорректированного на температуру коэффициента измерительного прибора его хранят в базе данных для последующего использования в процессе определения удельного массового расхода жидкости. На этом заканчивается исполнение стандартной программы 1100.
Для специалистов в данной области сейчас совершенно ясно, что хотя обе канальные пары работают параллельно, т.е. одна канальная пара работает в своем нулевом режиме, а в это же время другая канальная пара работает в своем режиме измерения, однако эти же канальные пары могут работать и последовательно. В этом последнем случае работающая канальная пара будет функционировать в своем нулевом режиме и/или в своем режиме измерения, тогда как другая канальная пара пребывает в резервном состоянии.
Затем канальные пары могут периодически переключаться с рабочего на резервный статус или состояние при завершении каждого режима работы или после того, как работающая канальная пара последовательно работает как в режиме измерения, так и в нулевом режиме. Поскольку при последовательном функционировании одна канальная пара будет всегда находиться в резервном состоянии в какой-то один момент времени, то для упрощения общей схемы прибора вместо двух канальных пар можно будет использовать одну канальную пару, которая будет всегда находиться в рабочем состоянии и будет постоянно и цикличным образом переходить из своего нулевого режима в режим измерения.
В тех случаях, когда одна фактически работающая канальная пара находится в своем нулевом режиме, не будет выполняться никаких измерений расхода потока. Таким образом, можно сделать предположение, что вместо фактического измерения расхода потока в данном случае необходимо будет более внимательно изучить поток жидкости, который в этот момент проходит через измерительный прибор.
Следовательно, за счет устранения непрерывных измерений расхода потока жидкости можно будет использовать в измерительных приборах Кариолиса только одну фактически работающую в какой-то конкретный момент времени канальную пару и выдать результаты измерений расхода потока, которые будут характеризоваться незначительной неточностью, причем сказанное выше не зависит от того, содержит измерительный прибор только одну физическую канальную пару, которая циклическим образом выполняет оба своих режима (нулевой режим и режим измерения), или две канальные пары, одна из которых в какой-то один момент времени находится в резервном состоянии.
В противоположность этому, предлагаемая по изобретению схема измерения расхода жидкости 30 всегда содержит одну канальную пару, которая в процессе выполнения обычных операций по измерению потока жидкости в любой момент времени измеряет фактический расход жидкости, причем в данном случае измерительный прибор выдает исключительно точные результаты измерения потока жидкости, что стало возможным лишь за счет незначительного увеличения сложности самой схемы измерения.
Более того, хотя в рамках нулевого режима для любой канальной пары уже предусмотрен "активный" интервал, в течение которого, например, можно будет выполнить двойные измерения потока жидкости и провести сравнения результатов измерения этого потока, однако в случае необходимости этот интервал можно анулировать без какого-либо отрицательного влияния на степень точности самого измерительного прибора.
Фактически анулирование упомянутого интервала можно использовать для уменьшения длительности нулевого режима на один интервал установки на нуль (т. е. уменьшить продолжительность периода, в течение которого канальная пара будет в противном случае работать в "активном" интервале) или увеличения длительности периода, в течение которого эта канальная пара фактически находится в режиме установки на нуль за счет соответствующего увеличения количества измерений внутренней фазовой задержки, которые должны выполняться позднее.
Для всех специалистов в данной области также ясно, что хотя в описанном варианте изобретения используются U-образные трубки Вентури, однако существует возможность использовать трубки Вентури практически любого размера и формы и практически во всех случаях, в которых эти трубки Вентури могут колебаться вокруг какой-то оси с целью образования безинерционной системы отсчета.
Например, в данном случае трубки Вентури могут быть представлены (но не ограничены только) прямолинейными трубками, S-образными трубками или трубками в виде замкнутой петли. Более того, хотя измерительный прибор по изобретению показан как содержащий две параллельные трубки Вентури, однако некоторые варианты изобретения имеют одиночную трубку Вентури или более двух параллельных трубок Вентури, например, три, четыре или даже больше.
Хотя в раскрытом выше описании описан и проиллюстрирован только один вариант изобретения, однако всем специалистам в данной области совершенно ясно, что возможно создание многих прочих вариантов измерительного прибора, которые основываются на сути и особенностях настоящего изобретения.
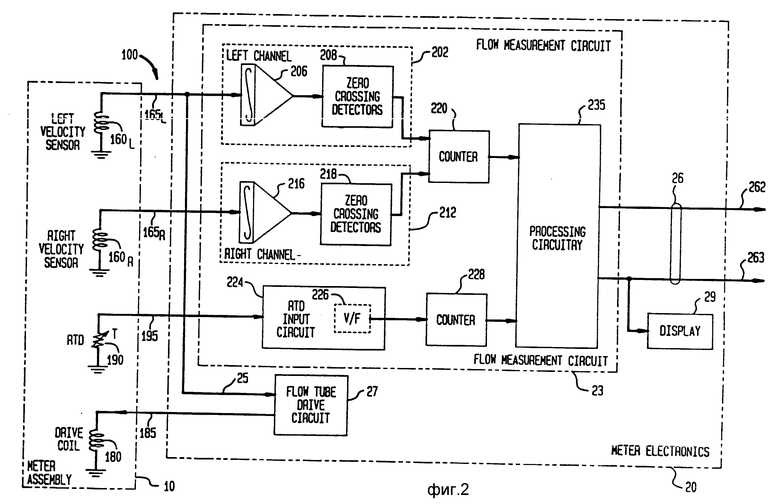
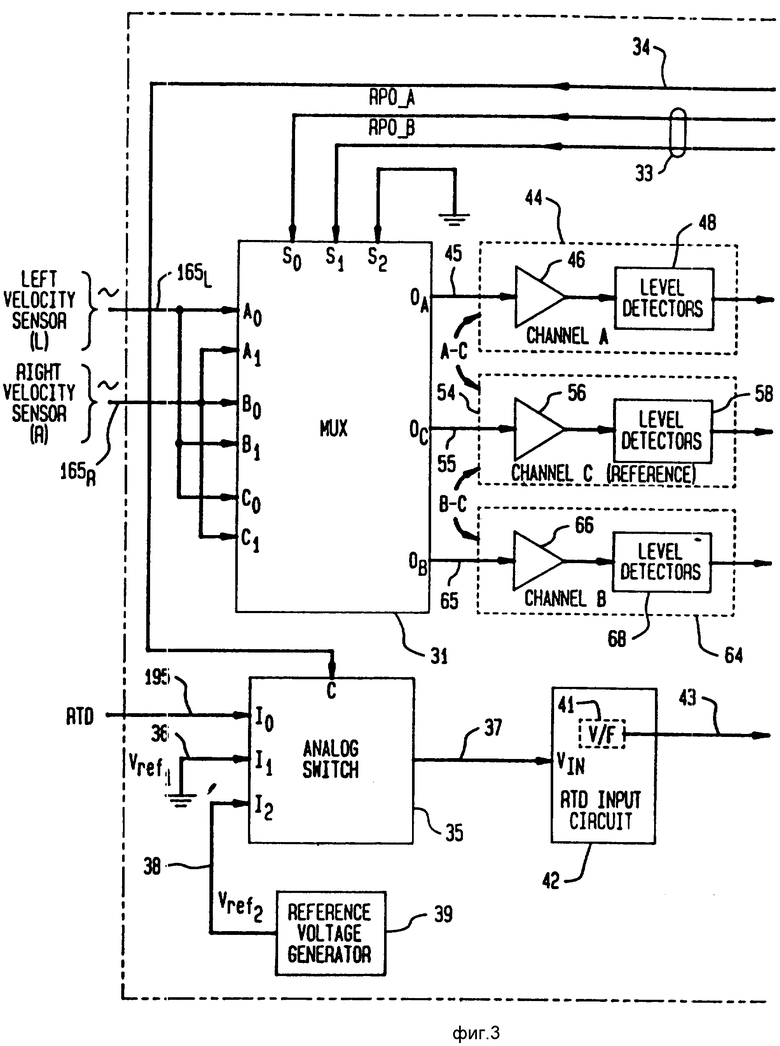
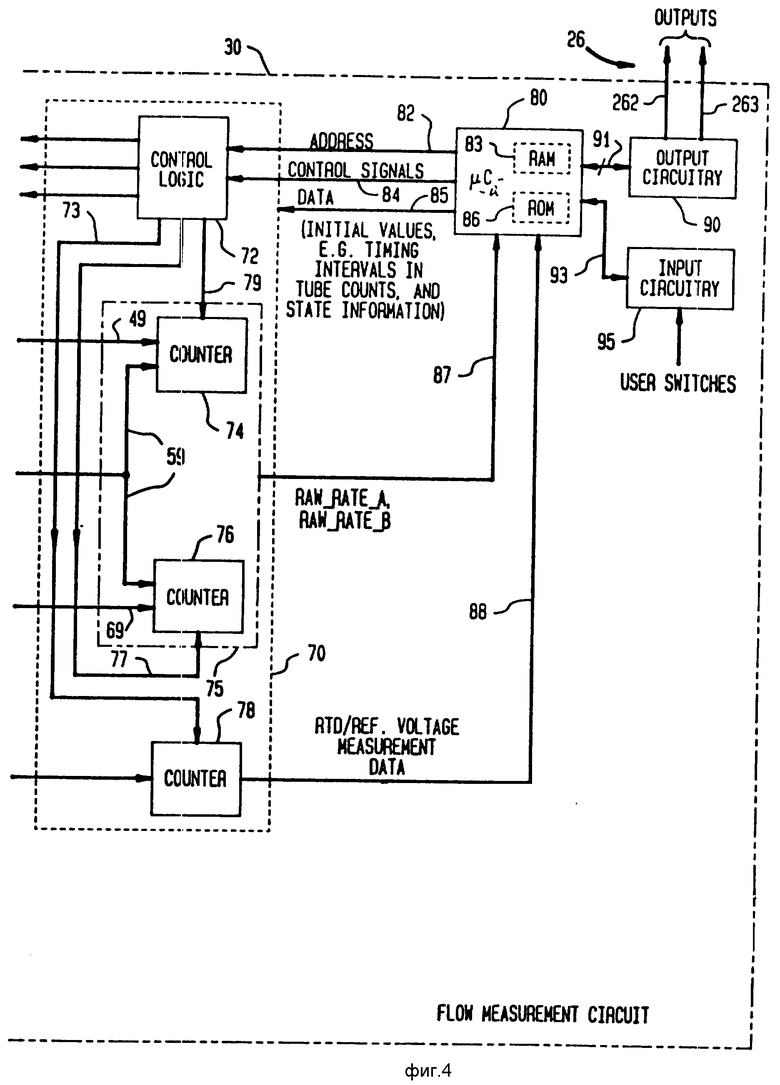
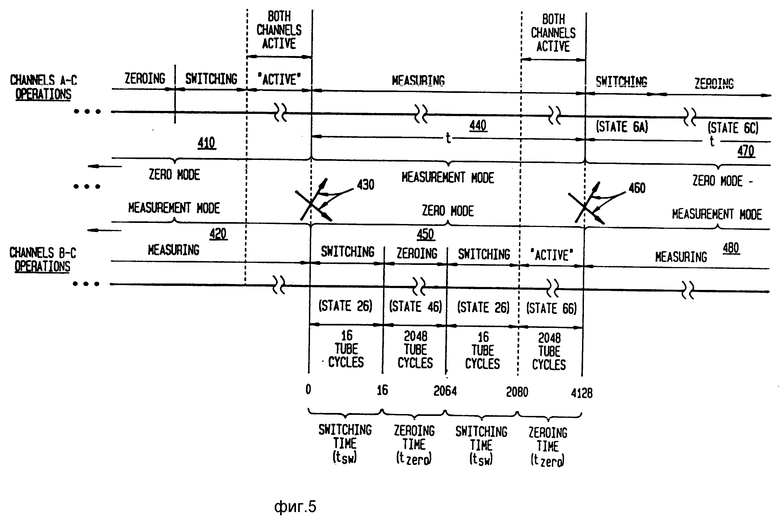
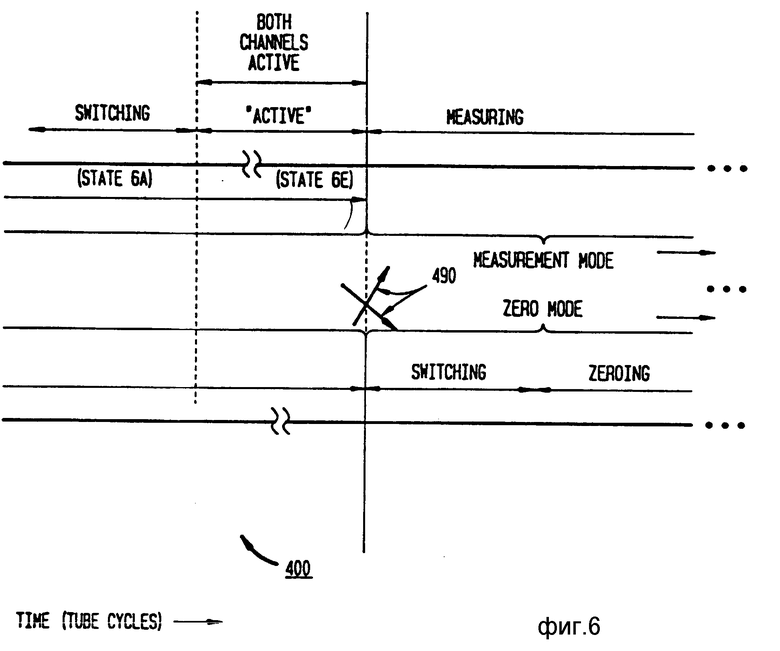
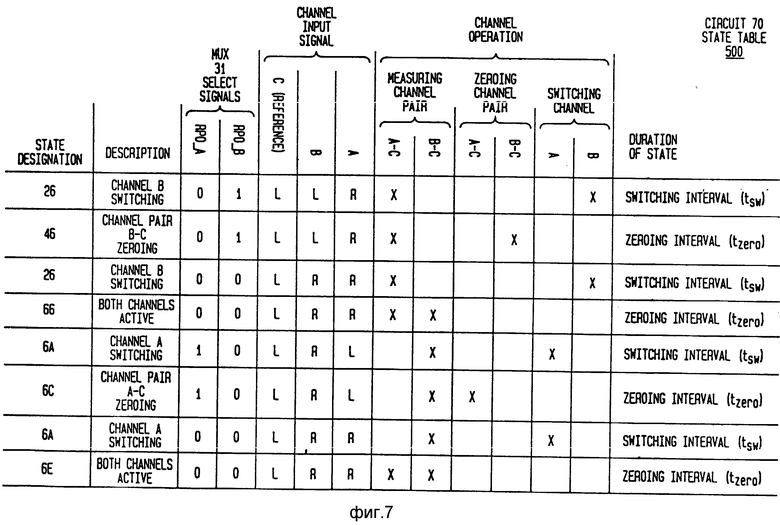
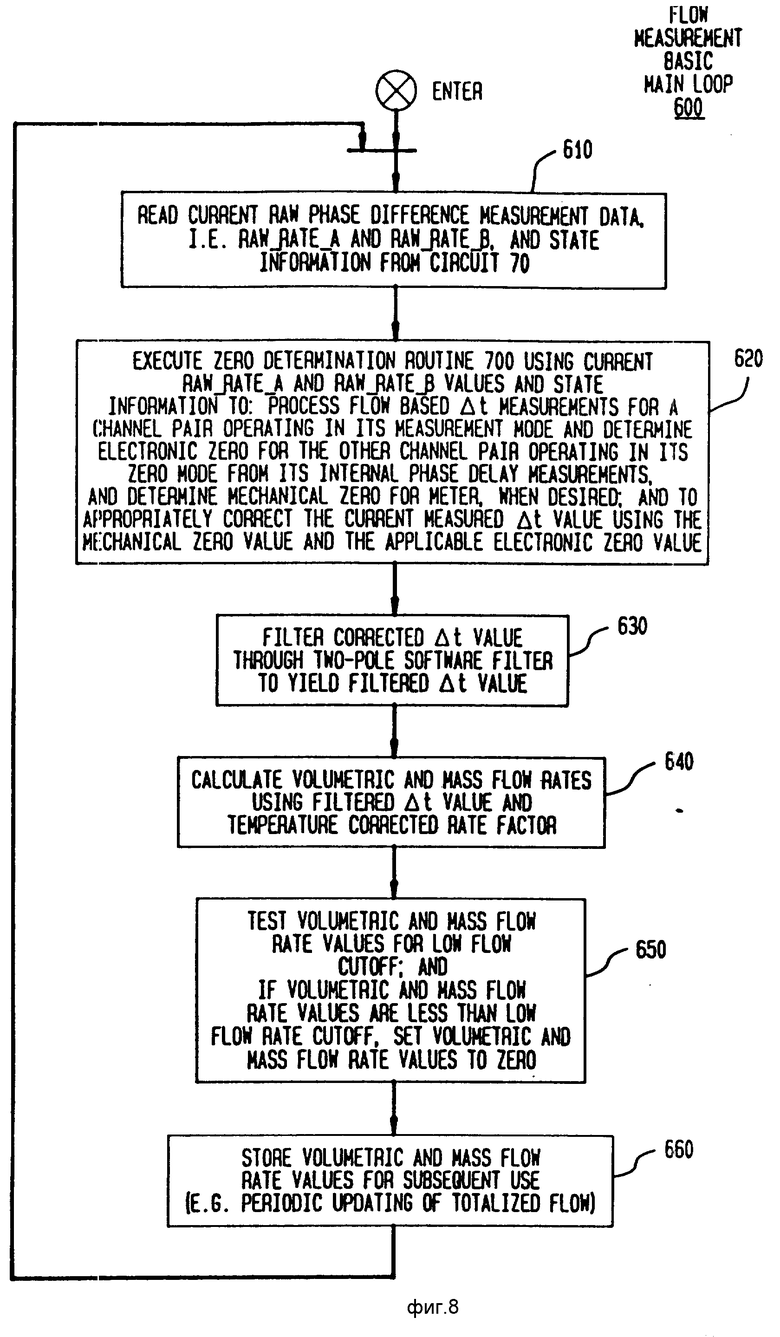
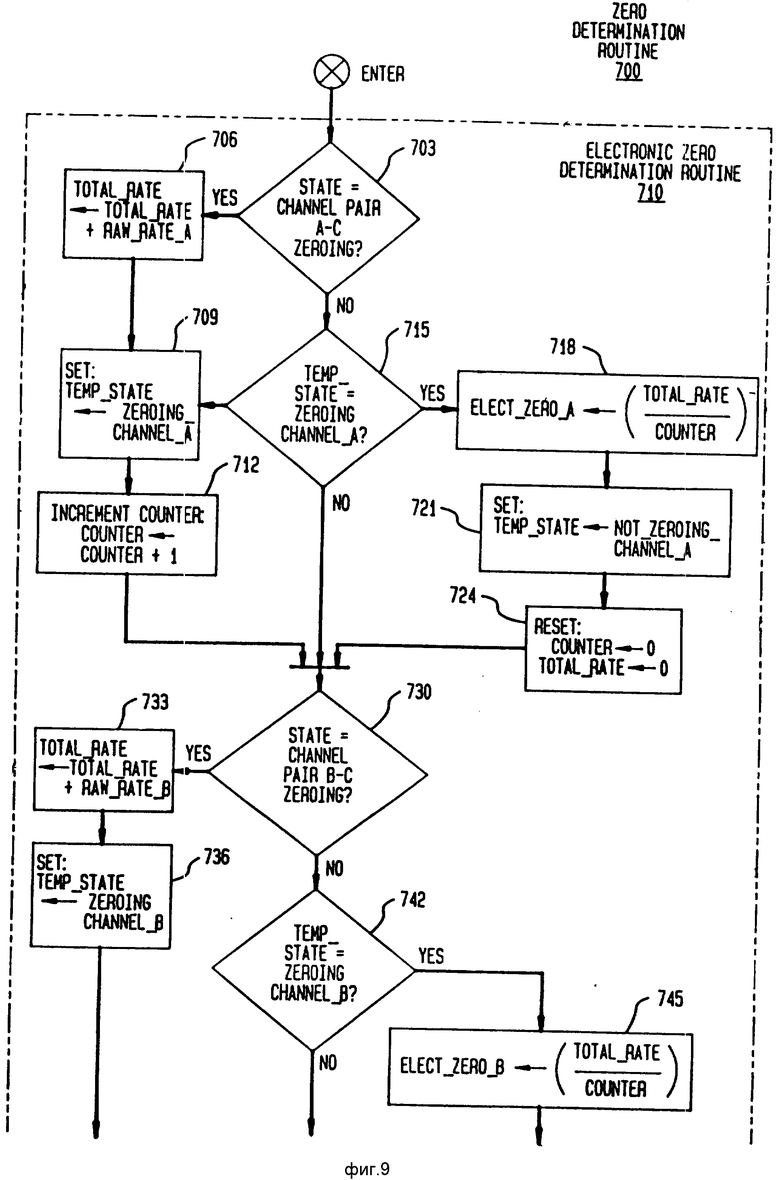
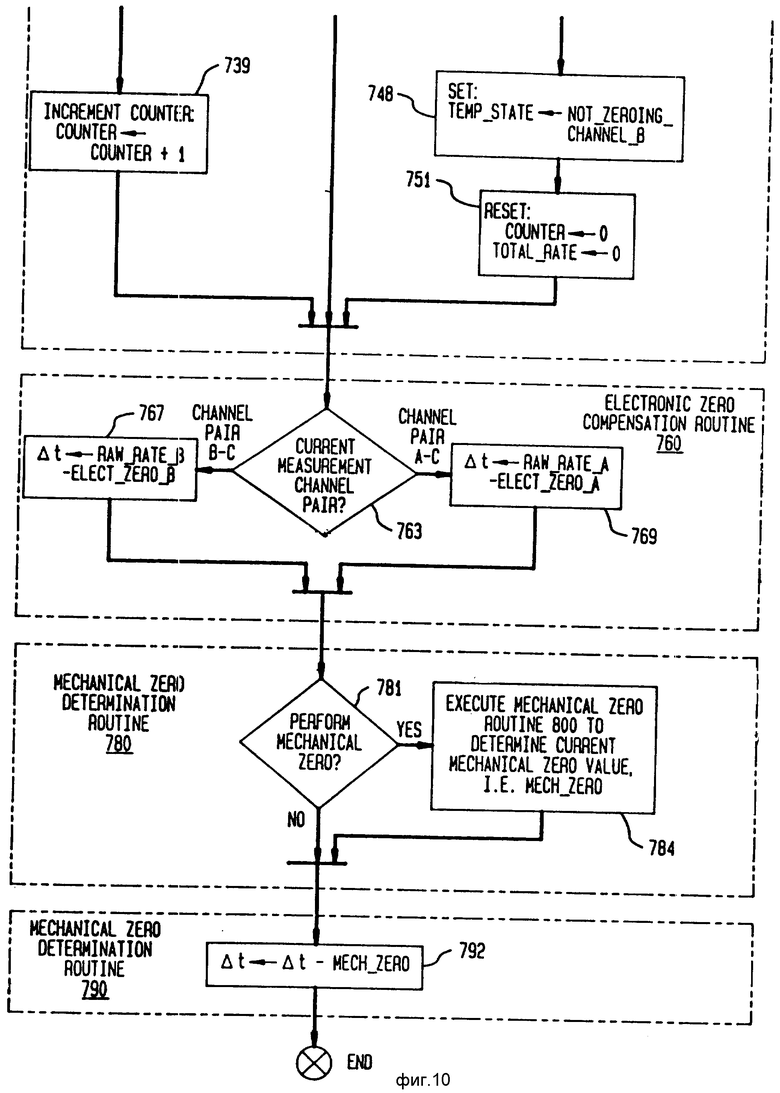
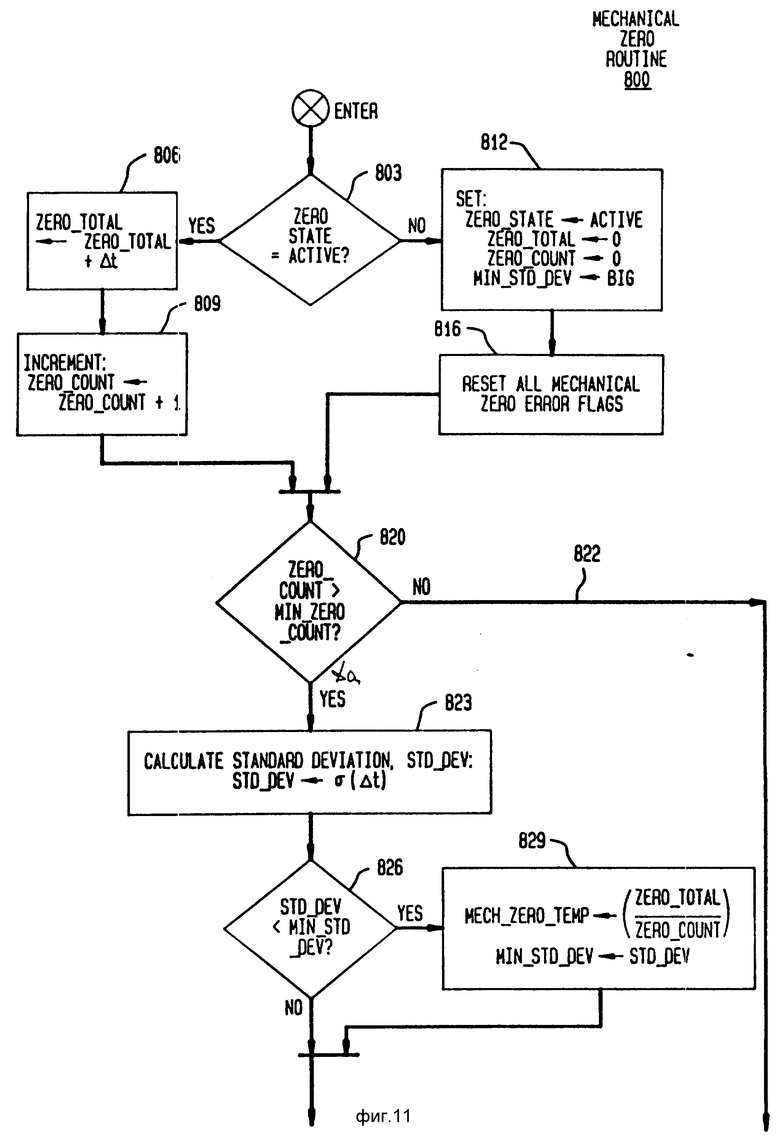
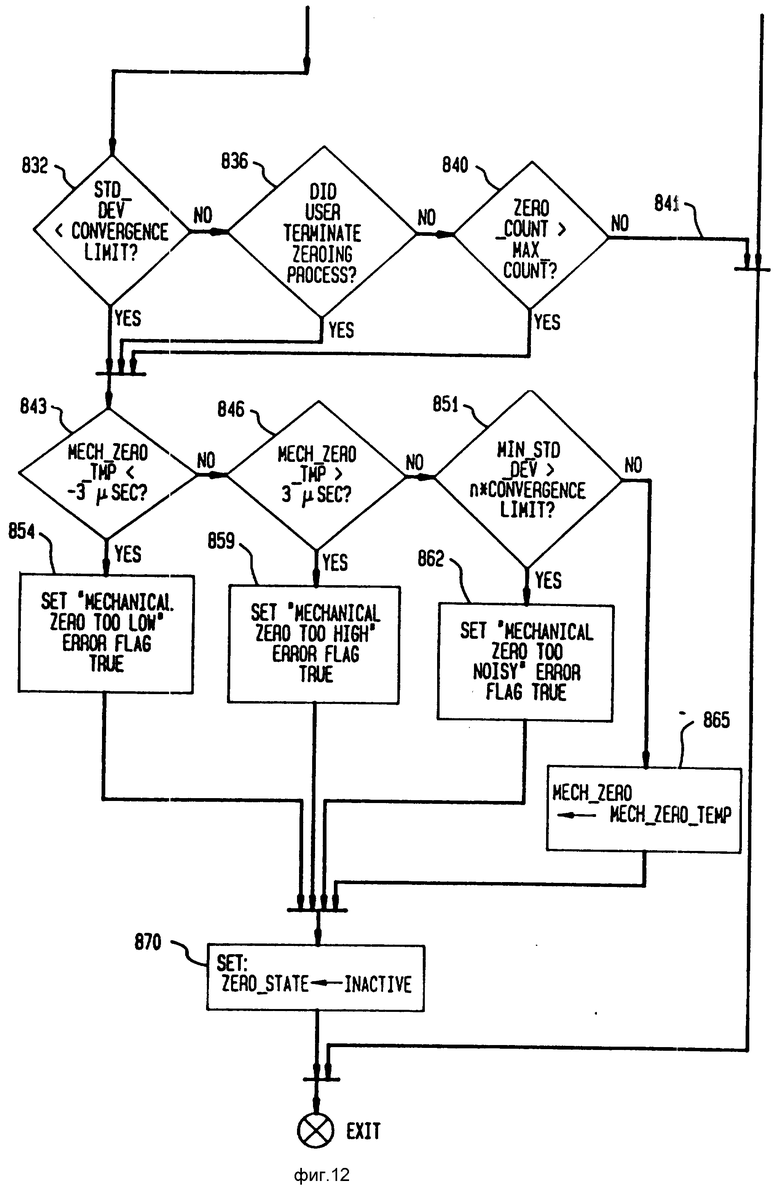
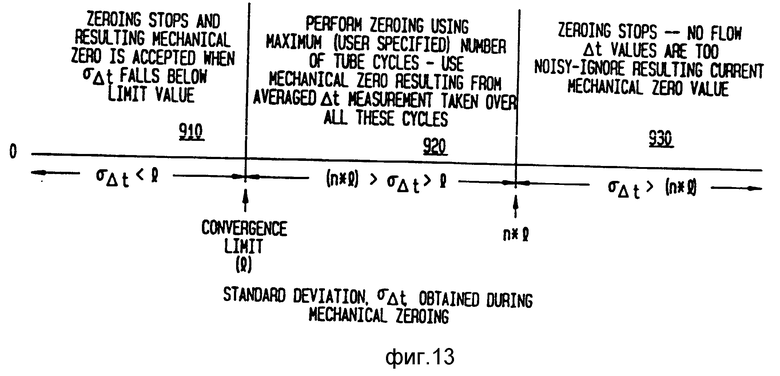
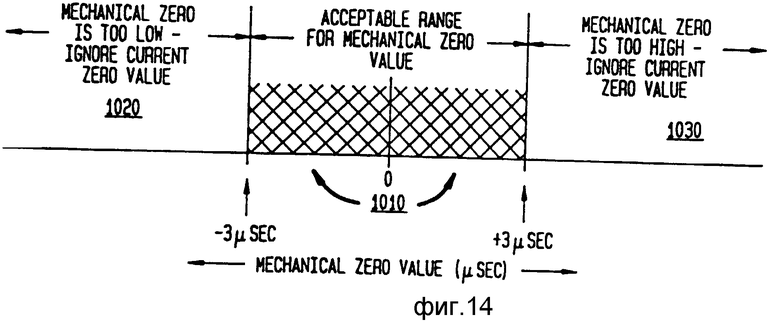
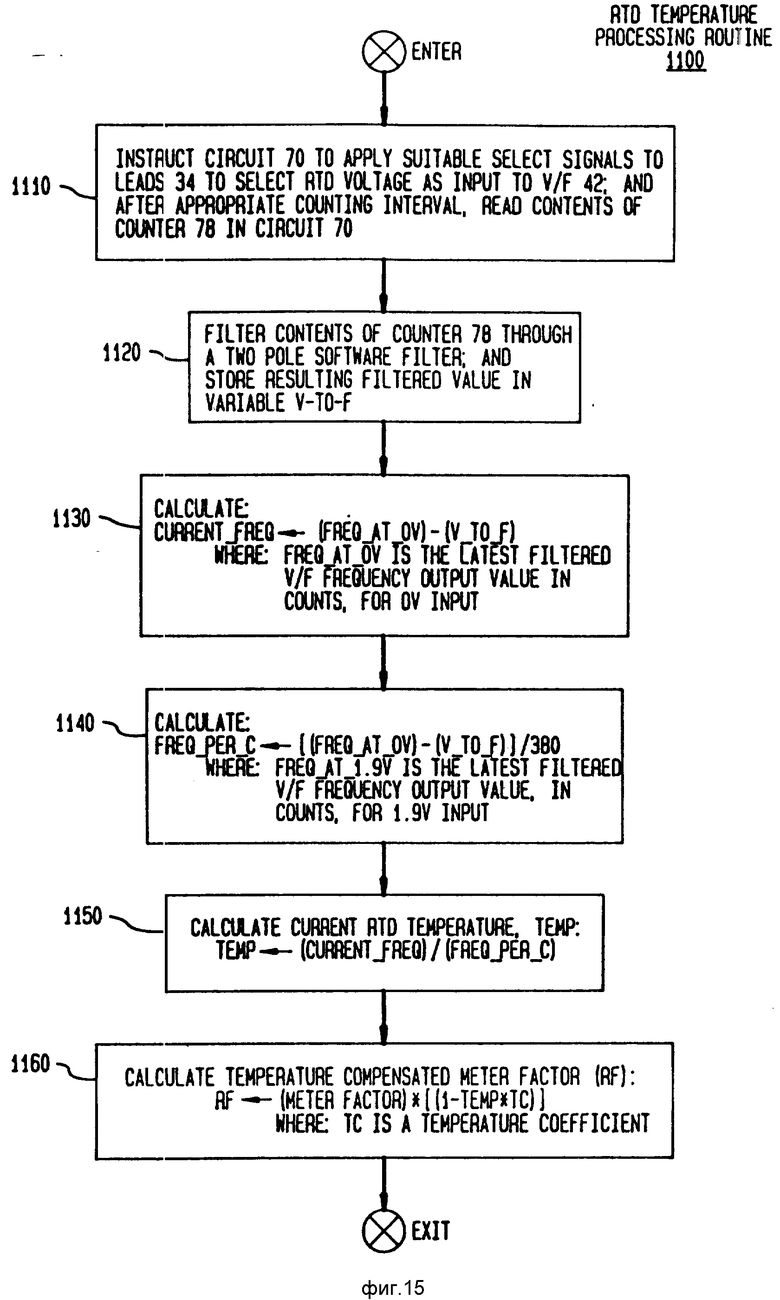
Использование: прибор Кариолиса (варианты) и способ для измерения удельного расхода технологической жидкости. Сущность изобретения: в измерительном приборе с парой входных каналов измеряют или внутреннюю фазовую задержку каждой из пар или фактический поток жидкости в циклическом режиме. Текущее значение внутренней фазовой задержки для каждой канальной пары отражает любые вызываемые колебанием температуры изменения. В результате устраняются температурные компоненты ошибки из результатов измерения потока. Прибор измеряет и обновляет значение отметки механического нуля, который учитывается в результате измерения. 4 с. и 37 з.п. ф-лы, 15 ил.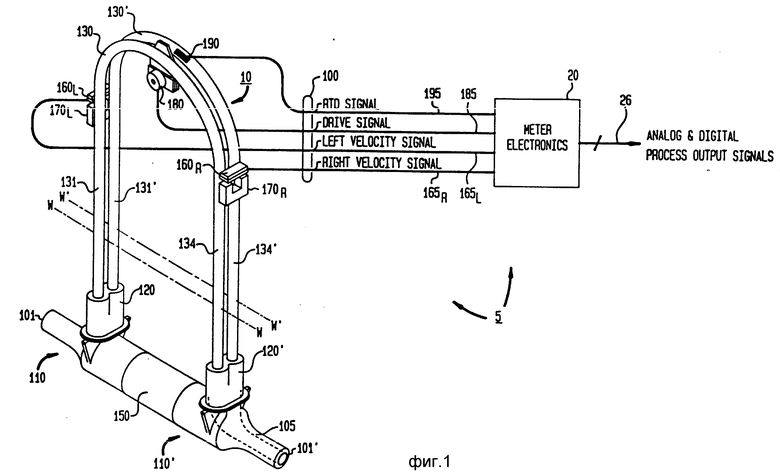
15. Способ по п.14, отличающийся тем, что первое и второе значения внутренней фазовой задержки измеряют при прохождении технологической жидкости через прибор.
| US, патент, 4491025, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
