Изобретение имеет отношение к измерению расхода материала, а более конкретно имеет отношение к использованию способов и устройств для адаптивной фильтрации с цифровой обработкой сигнала для массовых расходомеров на эффекте Кориолиса.
Известно использование массовых расходомеров с использованием эффекта Кориолиса для измерения массового расхода и получения другой информации относительно материалов, протекающих по трубопроводу. В настоящее время известны такие расходомеры, например, в соответствии с патентами США N 4, 109, 524 с приоритетом от 29 августа 1978 г., N 4, 491, 025 с приоритетом от 1 января 1985 и в соответствии с патентом США Re. 31, 450 с приоритетом от 11 февраля 1982 г., все на имя Дж. Е. Смита и других. Эти расходомеры имеют одну или несколько расходных трубок прямой или изогнутой конфигурации. Каждая конфигурация расходной трубки в массовом расходомере Кориолиса имеет набор собственных вибрационных мод, который может относиться к типу простого изгиба, кручения или к смешанному (связанному) типу. Каждая расходная трубка приводится в колебательное движение в резонансе на одной из этих собственных мод. Жидкость втекает в расходомер из смежного трубопровода на стороне впуска, направляется в расходную трубку или трубки и вытекает из расходомера в трубопровод, подключенный на выпускной стороне расходомера. Собственные вибрационные моды вибрирующей (колеблющейся), наполненной жидкостью системы определяются частично комбинированной массой расходных трубок и материалом внутри расходных трубок.
Когда нет потока через расходомер, то все точки вдоль расходной трубки колеблются в одинаковой фазе в результате приложения силы возбуждения. Но как только начнет протекать поток материала, то ускорения Кориолиса приводят к появлению различных фаз для каждой точки вдоль расходной трубки. Фаза на стороне впуска расходной трубки имеет запаздывание относительно фазы возбуждения, в то время как фаза на стороне выпуска имеет опережение относительно фазы возбуждения. На корпусе расходной трубки размещены датчики для выработки синусоидальных сигналов, несущих информацию относительно движения расходной трубки. Разность фаз между двумя сигналами датчиков пропорциональна массовому расходу материала, протекающего через расходную трубку.
Осложняющим фактором при этом измерении является изменение плотности типичных обрабатываемых материалов. Изменения плотности вызывают изменение частот собственных мод. Так как система управления расходомера поддерживает резонанс, при изменении плотности происходит изменение частоты колебаний. В этой ситуации массовый расход пропорционален отношению разности фаз и частоты колебаний.
В указанном патенте США N Re. 31, 450 на имя Смита раскрыт расходомер на эффекте Кориолиса, в котором удается избежать необходимости измерения как разности фаз, так и частоты колебаний. Разность фаз в этом расходомере определяют путем измерения временной задержки между пересечениями уровня двух синусоидальных сигналов, поступающих от расходомера. При использовании такого метода измерения изменения в частоте колебаний устраняются, а массовый расход становится пропорциональным измеренной временной задержке. Поэтому в последующем изложении этот метод измерения именуется как измерение временной задержки или Δt измерение.
Измерения в массовом расходомере Кориолиса должны быть произведены с высокой степенью точности, так как часто ставится требование, чтобы полученная информация о массовом расходе имела точность по меньшей мере 0,15% отсчета. Блок обработки сигналов, на который поступают выходные сигналы датчиков, с высокой точностью измеряет разность фаз и вырабатывает желательные характеристики протекающего обрабатываемого материала с требуемой точностью, которая составляет по меньшей мере 0,15% отсчета.
Для достижения указанной точности необходимо, чтобы блок обработки сигнала с высокой точностью производил измерение фазового сдвига двух сигналов, которые поступают на него от расходомера. Так как фазовый сдвиг между двумя выходными сигналами измерительного прибора представляет собой информацию, которая используется в блоке обработки для получения характеристик материала, то необходимо, чтобы блок обработки не вводил никакого фазового сдвига, который мог бы маскировать информационный фазовый сдвиг, создаваемый выходными сигналами датчика. На практике необходимо, чтобы этот блок обработки имел чрезвычайно малый собственный присущий ему фазовый сдвиг, так чтобы фаза каждого выходного сигнала сдвигалась менее чем на 0,001o, а в некоторых случаях, даже менее чем на несколько миллионных градуса. Указанная точность измерения фазы требуется, если нужно достичь точности выше 0,15% для производной информации, касающейся обрабатываемого материала.
Частоты выходных сигналов расходомера Кориолиса лежат в частотном диапазоне, в котором находятся большинство промышленных шумов (индустриальных помех). Кроме того, амплитуда выходных сигналов датчика часто является малой и, во многих случаях, незначительно превышающей амплитуду шумовых сигналов. Это лимитирует чувствительность расходомера и делает извлечение полезной информации достаточно трудной задачей.
В указанной ситуации разработчик может только сдвинуть частоту выходного сигнала расходомера вне полосы шума или увеличить амплитуду выходного сигнала. Применяемые на практике датчики Кориолиса и конструкции расходомеров построены с использованием компромиссных решений, что приводит к выработке выходных сигналов, имеющих отличающиеся от оптимального отношение сигнал/шум и динамический диапазон. Это ограничение определяет характеристики расходомера и его технические параметры, в том числе минимальный и максимальный расходы, которые надежно могут быть получены (определены) с использованием выходных сигналов расходомера.
Величина минимальной временной задержки, которая может быть измерена между двумя выходными сигналами расходомера Кориолиса при заданной частоте возбуждения, ограничена различными факторами, в том числе отношением сигнал/шум, сложностью построения блока обработки сигнала и экономическими соображениями, которые ограничивают стоимость и сложность блока обработки сигнала. Кроме того, для производства экономически выгодного расходомера нижний предел измерения временной задержки должен быть настолько низким, насколько это возможно. Блок обработки, на который поступают два выходных сигнала, должен позволять производить надежное измерение временной задержки между двумя сигналами, что дает возможность создания измерительного блока, обладающего высокой чувствительностью, необходимой для измерения характеристик расхода материала, имеющего низкую плотность и массу, такого, например, как газ.
Имеются ограничения, касающиеся того объема, в котором известные схемные решения сами по себе позволяют осуществлять точные измерения временной задержки во всех возможных условиях работы расходомера Кориолиса. Эти ограничения вызваны собственными шумами, имеющимися в любом электронном оборудовании в результате несовершенства полупроводниковых элементов, а также шумов, генерируемых другими электронными компонентами. Эти ограничения вызваны также шумами окружающей среды, которые аналогичным образом ограничивают точность измерения; эти шумы в определенной степени могут быть уменьшены при использовании техники экранирования, защиты, заземления и т.п.
Другое ограничение связано с отношением сигнал/шум самих по себе выходных сигналов датчиков.
При умелом проектировании аналоговой схемы можно решить некоторые из проблем, связанных с шумами электронного оборудования, а также с шумами окружающей среды. Однако улучшение отношения сигнал/шум выходных сигналов не может быть достигнуто без использования аналоговых фильтров. Однако аналоговые фильтры ухудшают амплитудные и фазовые характеристики подлежащих обработке сигналов. Это нежелательно, так как временная задержка между двумя сигналами является базовой информацией, используемой для выработки характеристик обрабатываемой жидкости. Использование фильтров с неизвестными или переменными амплитудными и/или фазовыми характеристиками может недопустимым образом изменять фазовый сдвиг между выходными сигналами двух датчиков и препятствовать получению точной информации относительно протекающего материала.
Сигнал возбуждения расходомера обычно вырабатывается из одного из выходных сигналов датчика после его формирования и фазового сдвига с последующим созданием синусоидального напряжения возбуждения для обмотки возбуждения измерителя. Недостатком такого решения является то, что присутствующие в сигнале датчика гармоники и компоненты шума усиливаются и прикладываются к обмотке возбуждения, с последующим созданием колебаний расходных трубок на их резонансной частоте. Однако нежелательный сигнал возбуждения может также генерироваться некоторыми нежелательными механическими вибраторами, при этом электрические помехи подаются по цепи обратной связи в контур возбуждения измерителя и усиливаются в замкнутом контуре таким образом, что они создают относительно высокую амплитуду собственных сигналов помехи, что дополнительно ухудшает точность измерения временной задержки.
Существует несколько хорошо известных способов и схем, которые помогают разрешить указанные выше проблемы. Успешные решения некоторых из указанных выше проблем предложены в патенте США 5, 231, 884 на имя М. Золока и в патенте США 5, 228, 327 на имя Брюка. В этих патентах описан блок обработки сигнала расходомера Кориолиса, в котором использованы три идентичных канала, имеющих прецизионные интеграторы в качестве фильтров. Первый из этих каналов постоянно подключен к одному из датчиков сигнала, например к левому. Остальные два канала (второй и третий) попеременно в последовательные временные интервалы подключаются к правому датчику сигнала. В то время, когда один из этих каналов, например второй канал, подключен к правому датчику сигнала, третий канал подключен, вместе с первым каналом, к левому датчику сигнала. Собственный фазовый сдвиг между первым и третьим каналами измеряется путем сравнения временной задержки между выходными сигналами двух каналов, которые теперь оба подключены к левому датчику. После определения этой характеристики задержки изменяется роль третьего канала и второго канала, подключенных к правому датчику сигнала. В этой новой конфигурации производится калибровка характеристик задержки второго канала, в то время как третий откалиброванный канал подключен к правому датчику сигнала. Роли второго и третьего каналов поочередно переключаются при помощи блока управления ориентировочно раз в минуту. В течение этого промежутка времени (от 30 до 60 с) старение, температура и другие эффекты оказывают пренебрежимое воздействие на фазовый сдвиг фильтров, поэтому их фазовые соотношения известны и могут считаться определенными.
Точно откалиброванные интеграторы, использованные Золоком, обеспечивают улучшение отношения сигнал/шум до спада около 6 дБ на октаву амплитудно-частотной характеристики интегратора. К несчастью, это улучшение 6 дБ на октаву является недостаточным для всех условий, при которых работают расходомеры Кориолиса (например, при протекании легких материалов и в чрезмерно зашумленной среде). Причина этого заключается в том, что однополюсный фильтр, такой как интегратор Золока, имеет относительно широкую полосу частот. В результате, шумовые сигналы, генерируемые нежелательными вибрационными модами расходной трубки, шумы окружающей среды, шумы потока материала, а также электромагнитные или радиочастотные помехи, не устраняются в том объеме, который требуется для достижения высокой чувствительности измерительного прибора, необходимой для получения высокой точности. В зависимости от частоты шумов их амплитуда в некоторой степени уменьшается, однако эти шумы все еще могут влиять на точность измерения временной задержки между двумя выходными сигналами датчиков в случае измерения материалов с малой массой, таких как газов.
Имеется и другой источник погрешностей в системе Золока или Брюка. Измерения временной задержки интегратора производятся в трех (3) точно определенных точках синусоидальных сигналов датчиков. Два сигнала датчика являются идеальными, только если они имеют одну и ту же форму и если они симметричны в районе их пиковых значений. Однако, если два магнитных устройства (датчика), которые вырабатывают сигналы датчиков, не являются идентичными, то результирующие неидеальные колебания могут содержать различные количества гармоник с возможными неопределенными фазовыми условиями, которые могут изменять (ухудшать) форму колебаний и потенциально изменять их симметричный характер. Результат таких вариаций приводит к тому, что когда, при нормальной работе, производят калибровку интегратора Золока при помощи одной формы колебаний, а затем этот интегратор используют для измерения другой формы колебаний, то различие в форме колебаний может приводить к неопределенной ошибке неизвестной величины, вызванной содержащимися в сигналах гармониками и неопределенными и изменяющимися фазами их гармоник.
Другие виды аналоговых технических решений имеют аналогичные проблемы сложности, недостаточной защищенности от шумов и недостаточной режекции (подавления) гармоник.
В настоящее время разработана такая техника, как цифровая обработка сигнала (именуемая далее DSP) и связанная с ней цифровая фильтрация, позволяющая решить обсуждавшиеся выше проблемы и одновременно улучшить отношение сигнал/шум для обрабатываемых сигналов. Однако такая альтернатива является более сложной и дорогостоящей, чем традиционные построения аналоговых схем. Кроме того, известные DSP устройства дают только незначительные улучшения по сравнению с аналоговыми схемами, в том, что касается помехозащищенности и подавления гармоник. В патенте США N 4, 934, 196 с приоритетом от 6 июня 1990 г. на имя Романо приведено устройство DSP для вычисления разности фаз, Δt и связанного с ними массового расхода. В соответствии с решением Романо изменяют частоту выборок АЦП (аналого-цифрового преобразователя) для поддержания целого числа выборок времени в пределах каждого периодического цикла вибрирующих расходных трубок. Необходимость иметь переменную частоту выборок усложняет устройство DSP Романо. Несмотря на то, что это устройство DSP структурно четко отличается от известных аналоговых устройств, оно дает только незначительные улучшения по сравнению с известными аналоговыми схемами, в том, что касается точности измерений, так как оно обеспечивает существенное улучшение фильтрации только при целых кратных числах основной частоты. Однако многие компоненты сигнала, которые получают от механических вибрационных мод расходных трубок, не являются целыми кратными числами основной частоты и поэтому слабо подавляются известными DSP устройствами.
Таким образом, ни одно из известных ранее решений (аналоговых или DSP) не позволяет эффективно подавлять негармонический или широкополосный шум. Из проведенного выше обсуждения становится понятным, что существует необходимость в создании улучшенных способов и устройств для измерения массового расхода в расходомере Кориолиса.
В соответствии с настоящим изобретением удается разрешить указанные выше проблемы и достичь прогресса в данной области за счет применении способов и устройств цифровой фильтрации и цифровой обработки сигнала (DSP), что позволяет повысить точность измерений массового расхода в расходомере Кориолиса. В настоящем изобретении предлагается устройство DSP, которое включает в себя адаптивные фильтры - пробки, позволяющее повысить точность измерений частоты и фазы, которые используются при вычислении массового расхода. Использование адаптивной фильтрации с фильтрами - пробками является применением технологии, которая обычно именуется Адаптивным Линейным Усилением (ALE).
В соответствии с настоящим изобретением производится выборка сигнала от датчика каждой вибрирующей расходной трубки, который затем квантуется и обрабатывается при помощи адаптивного фильтра - пробки, который пропускает все сигналы, кроме узкой полосы частот вокруг основной частоты. Этот оцифрованный отфильтрованный сигнал затем вычитается из исходного оцифрованного сигнала, что позволяет получить улучшенный (далее используется термин "усиленный") сигнал, отображающий выходной сигнал датчика на основной частоте, в котором все шумовые сигналы устранены. Этот способ и устройство позволяют устранять как гармонические, так и негармонические шумовые сигналы. Первоначально устанавливают ширину пробки большой, а затем постепенно ее адаптируют (сужают) к основной частоте. Алгоритмы адаптации позволяют быстро адаптировать частоту пробки адаптивного фильтра к отслеживанию изменений основной частоты вибрирующих расходных трубок.
Предлагаемое в настоящем изобретении устройство DSP использует фиксированную частоту выборок, что является его отличием от устройства Романо с переменной частотой. Такой подход с фиксированной частотой позволяет достичь быстрой сходимости адаптивного фильтра - пробки на основной частоте вибрирующих расходных трубок и упрощает построение всего устройства. Наличие фиксированной частоты устраняет необходимость в наличии дополнительных схем для изменения частоты выборок, которые применялись в устройстве Романо. В настоящем решении осуществляются вычислительные регулировки для компенсации просачивания спектральных составляющих между фиксированной частотой выборок и переменной основной частотой вибрирующих расходных трубок. Несмотря на дополнительную вычислительную сложность, устройство в соответствии с настоящим изобретением является более простым по сравнению с известными ранее решениями (например, устройством Романо) и обеспечивает лучшее подавление шумов в результате использования адаптивного фильтра - пробки.
Настоящее изобретение обеспечивает лучшее подавление шумов и гармоник по сравнению с известными решениями и упрощает аспекты DSP - решения, предложенного Романо. Это позволяет повысить точность измерений массового расхода даже в чрезвычайно зашумленной среде, а также в таких применениях, как материалы малой плотности (например, газы).
Так как расходные трубки вибрируют на одной и той же основной частоте, адаптация фильтров - пробок может быть произведена за счет выборок только от одного из двух фильтров - пробок. Полученные при этом весовые коэффициенты адаптации могут быть применены для обоих фильтров - пробок. Эвристики, которые используются при проведении вычислений в соответствии с настоящим изобретением, предотвращают расходимость от основной частоты в результате нестабильности вычислений. Другие эвристики повторно начинают вычисления сходимости при адаптации, когда измеренное фильтром - пробкой отношение сигнал/шум слишком мало. Малое отношение сигнал/шум указывает, что адаптивный фильтр - пробка не сходится на основной частоте. Это может быть вызвано сдвигом основной частоты вибрирующих расходных трубок.
В соответствии с первым вариантом настоящего изобретения, производится выборка выходного сигнала от датчика каждой из вибрирующих расходных трубок при фиксированной частоте при помощи соответствующего АЦП. Выработанная каждым АЦП величина выборки затем подается на соответствующий прореживающий цифровой фильтр для уменьшения вычислительной сложности путем уменьшения числа выборок, используемых в последующих вычислениях. Прореживающие цифровые фильтры также обеспечивают защиту от наложения спектров для сглаживания аналоговых сигналов выборки. Прореженные цифровые сигналы затем индивидуально подаются на соответствующий адаптивный фильтр - пробку для усиления сигнала от каждого из датчиков. Усиленный выходной сигнал от каждого датчика после того, как из него отфильтровано большинство шумов и гармоник, подается на соответствующий элемент вычисления фазы, чтобы получить фазовый сдвиг между двумя усиленными сигналами. Выходной сигнал с каждого элемента вычисления фазы подается на вычислительный элемент для получения временной задержки (разности времени) между усиленными сигналами датчиков и, следовательно, пропорционального массового расхода.
В соответствии со вторым вариантом способов настоящего изобретения, используются четыре адаптивных фильтра - пробки, по два последовательно для сигналов левого и правого каналов. Два фильтра в каждом левом и правом каналах "каскадированы" так, что первый фильтр является Q - фильтром с широкой зоной пробки (непропускания), в результате чего он обеспечивает только ограниченное усиление сигнала, однако обладает способностью быстрой сходимости при изменениях основной частоты вибрирующих расходных трубок. Сигнал с выхода первого касакадированного фильтра - пробки затем подается на второй каскадированный фильтр - пробку. Второй фильтр - пробка является Q - фильтром с узкой зоной пробки (непропускания), в результате чего он обеспечивает лучшее качество подавления шумов и гармоник по сравнению с известными ранее решениями или по сравнению с описанным выше первым вариантом. Несмотря на узкую зону пробки (непропускания) второго фильтра - пробки, он может быстро адаптироваться к изменениям основной частоты вибрирующих расходных трубок в результате ограниченного усиления (фильтрации), осуществленного первым фильтром - пробкой. Уменьшенный уровень шумов и гармоник сигнала, поступающий на второй фильтр - пробку, позволяет ему быстро сходиться при изменениях основной частоты вибрирующих расходных трубок.
Дополнительный (пятый) фильтр - пробка, который имеет полосу пробки (задерживания, непропускания) еще более широкую, чем у первого из каскадированных фильтров, используется для получения оценки основной частоты вибрирующих расходных трубок. Эта оценка используется при вычислении весовой адаптации для уставки параметра частоты первого каскадированного фильтра - пробки как в левом, так и в правом каналах. Выходной сигнал со вторых каскадированных фильтров - пробок используется при вычислении весовой адаптации для регулировки параметра частоты вторых каскадированных фильтров - пробок.
Указанная комбинация двух (или более) каскадированных адаптивных фильтров - пробок для усиления выходного сигнала от каждого датчика дополнительно улучшает характеристики подавления при фильтрации и повышает скорость, с которой адаптивные фильтры сходятся при изменениях основной частоты вибрирующих расходных трубок.
Используемый здесь термин "адаптивный фильтр - пробка" относится к фильтру с переменными параметрами. Это определение отличается от более широко принятого определения, в соответствии с которым фильтр с переменными параметрами комбинируется с механизмом для автоматической настройки параметров фильтра, базируясь на его собственных входных и выходных сигналах. Используемая в настоящем изобретении адаптация некоторых фильтров - пробок вычисляется скорее на основе работы других фильтров, а не на основе собственных входных и выходных сигналов фильтра. Другими словами, работа некоторых фильтров - пробок в соответствии с настоящим изобретением управляется вычислениями от других фильтров - пробок. По этой причине разделено детальное обсуждение фильтров и механизмов адаптации. При вычислении адаптации можно произвести настройку параметров множества фильтров - пробок, базируясь на выходном сигнале единственного фильтра.
Указанные выше и другие аспекты настоящего изобретения будут более ясны из последующего описания, приведенного со ссылкой на сопроводительные чертежи.
На фиг. 1 показан типичный массовый расходомер Кориолиса, соединенный с измерительным электронным блоком, в котором использованы устройства и способы в соответствии с настоящим изобретением.
На фиг. 2 показана блок-схема вычислительных элементов в измерительном электронном блоке, при помощи которых производится определение массового расхода материала через расходомер в соответствии с настоящим изобретением.
На фиг. 3 показаны некоторые дополнительные детали первого варианта настоящего изобретения, показанного на фиг. 2, в котором единственный адаптивный фильтр - пробка использован для каждого сигнала датчика.
На фиг. 4-12 показаны дополнительные детали вычислительных элементов первого варианта настоящего изобретения, показанного на фиг. 3.
На фиг. 13 показаны некоторые дополнительные детали второго варианта настоящего изобретения, показанного на фиг. 2, в котором два каскадированных адаптивных фильтра - пробки использованы для каждого сигнала датчика.
На фиг. 14-16 показаны дополнительные детали вычислительных элементов второго варианта настоящего изобретения, показанного на фиг. 13.
На фиг. 17 показана блок-схема программного обеспечения в соответствии с первым вариантом настоящего изобретения и описана обработка с прерыванием для обслуживания АЦП и объединенной с ним схемы прореживания выборок.
На фиг. 18 показана блок-схема программного обеспечения в соответствии с первым вариантом настоящего изобретения и описана обработка выборок с прореживанием, с целью фильтрации и определения разности фаз Δt.
На фиг. 19 показана блок-схема, отображающая работу некоторых дополнительных элементов фиг. 18, в соответствии с которой производится обновление параметров фильтра после обработки каждой прореженной выборки.
На фиг. 20 показана блок-схема электронного блока цифровой обработки сигнала, который пригоден для реализации программных способов в соответствии с настоящим изобретением.
Обратимся теперь к рассмотрению фиг. 1, на которой показан типичный массовый расходомер 10 с использованием эффекта Кориолиса, который имеет две консольно установленные расходные трубки 12, 14, закрепленные в корпусе коллектора 30 таким образом, что они имеют главным образом идентичные жесткости пружины и моменты инерции относительно их соответствующих сдвинутых по фазе осей изгиба W-W и W' - W'.
Катушка возбуждения и магнит 20 установлены в средней области (посредине) между верхними участками 130 и 130' расходных трубок 12, 14 и приводят расходные трубки 12, 14 в колебания со сдвигом по фазе относительно осей W-W и W' - W'. Левый датчик 16 и правый датчик 18 установлены вблизи соответствующих концов верхних участков расходных трубок 12, 14 и предназначены для измерения относительного перемещения расходных трубок 12, 14. Это измерение может производиться различными способами, в том числе путем измерения перемещения верхних концов расходных трубок 12, 14 при помощи измерения момента пересечения нуля (или любой другой заранее заданной точки) их выходного сигнала. Расходные трубки 12, 14 имеют левые боковые ветви 131 и 131' и правые боковые ветви 134 и 134'. Боковые ветви сходятся друг к другу в направлении вниз и закреплены на поверхностях 120 и 120' элементов коллектора 121 и 121'. Скрепляющие штанги 140R и 140L припаяны к ветвям расходных трубок 12, 14 и служат для определения положения осей W-W и W' - W', относительно которых со сдвигом по фазе колеблются расходные трубки, когда возбудитель 20 запитывается по линии 156. Положение осей W-W и W' - W' определено расположением скрепляющих штанг 140R и 140L на боковых ветвях 131 и 131' и боковых ветвях 134 и 134'.
Датчик температуры 22 установлен на боковой ветви 131 расходной трубки 14 и служит для измерения температуры расходной трубки и ориентировочной температуры материала, протекающего в ней. Эта информация о температуре используется для определения изменений жесткости пружины расходных трубок. Возбудитель 20, датчики 16, 18 и датчик температуры 22 подключены к измерительному блоку 24 соответствующими линиями 156, 157, 158 и 159. Измерительный блок 24 включает в себя по меньшей мере один микропроцессор, который обрабатывает сигналы, поступающие от датчиков 16, 18 и 22, для определения массового расхода материала, протекающего через расходомер 10, а также для определения других параметров, таких как плотность и температура материала. Измерительный блок 24 массового расходомера также подает сигнал возбуждения по линии 156 на возбудитель 20 для возбуждения колебаний трубок 12 и 14 со смещением по фазе относительно осей W - W и W' - W'.
Корпус коллектора 30 образован отливками 150, 150'. Отливки 150, 150' могут быть подсоединены к питающему трубопроводу и выходному трубопроводу (не показаны) при помощи фланцев 103, 103'. Корпус коллектора 30 отклоняет поток материала из питающего трубопровода в расходные трубки 12, 14, а затем назад в выходной трубопровод. Когда фланцы коллектора 103, 103' подключены через входной конец 104 и выходной конец 104' к системе трубопроводов (не показана), в которой протекает подлежащий измерению обрабатываемый материал, то этот материал заходит в корпус коллектора 30 и в элемент коллектора 110 через впускное отверстие 101 во фланце 103, которое соединено, при помощи канала (не показан) с постепенно изменяющимся поперечным сечением в элементе отливки 150, с расходными трубками 12, 14. Материал разделяется и направляется элементом коллектора 121 в соответствующие левые ветви 131 и 131' расходных трубок 14 и 12. Затем материал протекает через верхние элементы трубок 130, 130' и далее через правые боковые ветви 134 и 134', а затем объединяется в единый поток внутри элемента коллектора 121'. После этого жидкость (или газ) направляется по каналу (не показан) в выходной отливке 150' и затем поступает к выходному элементу коллектора 110'. Выходной конец 104' подключен фланцем 103', имеющим отверстия под болты 102' и окно 101', с системой трубопроводов (не показана). Материал, который вытекает через выходное отверстие 101', втекает в поток в системе трубопроводов (не показана).
Выходные сигналы от датчиков поступают по линиям 157, 158 и 159 в измерительный блок расходомера 24, в котором эти сигналы обрабатываются и вырабатывается выходная информация (которая выдается по линии 155) относительно массового расхода материала, протекающего внутри расходных трубок 12 и 14, которая может быть использована системой управления или оператором.
В соответствии с настоящим изобретением используются способы цифровой обработки сигнала, которые реализуются при помощи однокристаллического цифрового сигнального процессора (DSP), используемого для осуществления вычислительных функций в измерительном блоке 24 массового расходомера. Из аналоговых сигналов, получаемых на выходах каждого из датчиков расходных трубок, отбираются дискретные выборки. Дискретные выборки от левого и правого датчиков преобразуются в цифровую форму с использованием стандартных устройств аналого-цифрового преобразования (АЦП). После преобразования в цифровую форму происходит дальнейшая цифровая сигнальная обработка выборок в кристалле DSP. Обработка преобразованных в цифровую форму выборок сигнала может быть выражена в двух видах. В одной из форм выражения присутствуют блок-схемы и уравнения программного обеспечения DSP, которые используются для осуществления различных функций фильтрации и обработки. Для того чтобы облегчить объяснение способов в соответствии с настоящим изобретением, используется вторая форма выражения, в соответствии с которой вычисление различных выражений описывается в виде псевдо-контуров (например, блок-схем, отображающих суммирующее соединение, умножающее соединение, схем задержки, регистров, мультиплексоров и т.п.). Некоторые более сложные математические операции на схемах псевдо-контуров показаны как элементы более высокого уровня и именуются здесь как "вычислительные элементы". Две формы выражения настоящего изобретения можно рассматривать как эквивалентные описания, в каждом из которых полностью отображаются способы и функции настоящего изобретения.
РАССМОТРЕНИЕ ПСЕВДО-КОНТУРОВ
На фиг. 2 показана общая структура и связанный с ней поток информации измерительного блока массового расходомера в соответствии с настоящим изобретением. Измерительный блок в соответствии с настоящим изобретением включает в себя два главным образом идентичных "канала": первый канал для обработки выходного сигнала датчика левой расходной трубки и второй канал для обработки выходного сигнала датчика правой расходной трубки. Оба "канала" идентичны, за исключением весовой адаптации фильтров - пробок, о чем будет сказано далее.
Приведенное далее описание дано для типичного применения расходомера Кориолиса, в котором основная частота вибрирующих расходных трубок составляет ориентировочно 100 Гц. Легко понять, что устройства и способы в соответствии с настоящим изобретением могут быть применены для любого известного расходомера с любой основной частотой вибраций.
Многие из вычислительных элементов, которые обсуждаются далее, работают синхронно с сигналами задающего генератора, объединенными с различными выборками выходных сигналов датчика расходной трубки. Задающий генератор (ЗГ) 214 фиг. 2 вырабатывают сигналы синхронизации, объединенные с различными скоростями выборок вычислительных элементов, которые обсуждаются далее. Прежде всего ЗГ 214 вырабатывает периодические импульсные синхросигналы для АЦП 200 по линии 270, позволяющие определить частоту выборок исходных (не обработанных) сигналов, вырабатываемых датчиками расходных трубок. Каждый АЦП 200 производит выборку его собственного аналогового сигнала (квантует его) и преобразует выбранную величину в цифровую форму при поступлении синхросигнала по линии 270 от ЗГ 240. Этот сигнал ЗГ, поступающий на АЦП 200 по линии 270, должен иметь частоту с высокой точностью, чтобы позволить произвести выборку выходных сигналов датчика расходной трубки с фиксированной частотой квантования, как это требуется при обработке в соответствии с настоящим изобретением. Эту высокую точность сигналов ЗГ преимущественно обеспечивают применением ЗГ с кварцевой стабилизацией. Этот же сигнал ЗГ делится и подается по линии 270 на элементы прореживающего цифрового фильтра 202 с отношением 48 : 1. Элементы прореживающего цифрового фильтра 202 уменьшают число выборок в 48 раз, при одновременной существенной фильтрации с защитой от наложения спектров квантованных значений сигнала. Специалисты в данной области легко поймут, что коэффициент прореживания 48:1 является простым инженерным выбором для конкретных условий применения.
ЗГ 214 также вырабатывает сигнал CLK, который подается на другие вычислительные элементы, обсуждающиеся далее. Частота сигнала CLK соответствует частоте значений выборок на выходе элементов 202 цифрового прореживающего фильтра. Другими словами, частота сигнала CLK составляет 1/48 частоты ЗГ, подаваемой по линии 270. В соответствии с предпочтительным вариантом настоящего изобретения, вычислительные элементы, которые "синхронизируются" сигналами CLK, выполнены (реализованы) в виде функций программного обеспечения, которые выполняются (осуществляются) при работе однокристаллического процессора цифрового сигнала (DSP). В соответствии с указанным, вычисления этих функций производятся над значениями прореженных дискретных квантованных выходных сигналов датчиков. "Синхронизация" этих функций соответствует наличию дискретных квантованных значений. Эти значения преимущественно буферизованы в реализованных программно очередях (списках очередности) или FIFO, так что эти функции могут в действительности работать асинхронно по отношению к фиксированной, задаваемой кварцем частоте квантования АЦП 200. В последующем описании чертежей сигнал CLK отображает частоту, при которой становятся доступны прореженные, дискретные, квантованные значения выходного сигнала датчика для дальнейшей обработки при помощи вычислительных элементов. Действительная вычислительная обработка в программном обеспечении внутри кристалла ("чипа") DSP проистекает главным образом асинхронно по отношению к частоте выборок АЦП, которая соответствует сигналу ЗГ по линии 270.
Выходной сигнал от датчика 18 правой расходной трубки фиг. 1 подается на АЦП 200 по линии 158 (фиг. 1). Выходной сигнал от датчика 16 левой расходной трубки фиг. 1 подается на второй АЦП 200 по линии 157 (фиг. 1). АЦП 200 производит квантование и преобразует аналоговый сигнал от датчика 18 правой расходной трубки в цифровую форму. Второй АЦП 200 производит квантование и преобразует аналоговый сигнал от датчика 16 левой расходной трубки в цифровую форму. АЦП 200 работают при поступлении по линии 270 частоты периодического сигнала от ЗГ 214.
Преобразованное цифровое значение поступает по линии 252 на элемент прореживающего фильтра 202 с отношением 48:1. Элемент прореживающего фильтра 202 с отношением 48:1 выполнен двухкаскадным: с первой ступенью (каскадом) 8: 1 и второй последующей ступенью 6:1. Обе ступени элемента прореживающего фильтра 202 преимущественно реализованы в виде КИХ-фильтров (фильтров с импульсной характеристикой с конечной длительностью) с защитой от наложения спектров. Специалисты в данной области легко поймут, что в ступенях прореживающего фильтра может быть использован и БИХ - фильтр (фильтр с импульсной характеристикой бесконечной длительности). Использование КИХ - фильтра вместо БИХ - фильтра является просто вопросом инженерного выбора, основанным на вычислительной сложности и относительной вычислительной мощности элементов, которые использованы в конкретной разработке.
Первый каскад элемента 202 прореживающего фильтра осуществляет уменьшение частоты выборок 8:1 в диапазоне от 38,4 кГц до 4,8 кГц. Фильтр имеет следующий коэффициент передачи:
G(z)-(l-z-8)5/(l-z-1)5
Компенсация полюсов - нулей приводит к получению КИХ - фильтра с 36 отпайками. Фильтр имеет 5 нулей на каждой кратной субчастоте выборок. Это обеспечивает сильное подавление этих частот, которые накладываются на полосу пропускания второго каскада фильтра. Этот первый каскад фильтра имеет малые целые коэффициенты, которые могут быть представлены в единственной точной компьютерной (вычислительной) арифметике, в результате чего упрощается сложность вычислений свертки и улучшается скорость выполнения операций.
Второй каскад элемента 202 прореживающего фильтра осуществляет уменьшение частоты выборок 6: 1 в диапазоне от 4,8 кГц до 800 Гц. Второй каскад фильтра имеет 131 отпайку и представляет собой КИХ - фильтр, в котором используется хорошо известный алгоритм обмена Ремеца. Полоса пропускания идет от постоянного тока до 250 Гц, а полоса задерживания начинается с 400 Гц. Полоса пропускания имеет вес 10-5, а полоса задерживания имеет вес 1.
За счет применения двухкаскадного прореживающего цифрового фильтра обеспечивается высокая степень защиты от наложения спектров. Все спектральные компоненты подавляются свыше 120 дБ, в то время как пульсации в диапазоне от постоянного тока до 230 Гц составляют менее 1,5 дБ.
Левый канал, который включает в себя АЦП 200 и элемент 202 прореживающего цифрового фильтра, подключенный по линии 250, работает аналогично обсуждавшемуся выше правому каналу. Выходной сигнал элемента 202 прореживающего цифрового фильтра левого канала выдается по линии 254.
В квантованных значениях от АЦП 200 и при вычислениях в каскадах прореживающего цифрового фильтра используется арифметическое устройство на 32 бита с фиксированной запятой, что позволяет поддерживать высокую точность вычислений и требуемое качество. Последующие вычисления при фильтрации с фильтром - пробкой, фазовые вычисления, вычисления Δt и вычисления массового расхода преимущественно осуществляются с использованием арифметического устройства с плавающей запятой, по причине более широкого диапазона вычислительного масштабирования, связанного с использованием более сложных функций.
Защищенные от наложения спектров, прореженные значения сигнала подаются по линии 256 на адаптивный фильтр - пробку 204. Адаптивный фильтр - пробка 204, подробное обсуждение работы которого приведено ниже, усиливает сигналы за счет эффективной фильтрации всех частот вне полосы, отцентрированной около основной частоты вибрирующих расходных трубок. Адаптивный фильтр - пробка 204 устраняет полосу частот, отцентрированных около основной частоты. В результирующем сигнале имеются все шумы, которые лежат вне полосы задерживания (пробки), отцентрированной относительно основной частоты вибрирующих расходных трубок. Этот шумовой сигнал затем вычитается из сигнала, приложенного на вход фильтра - пробка 204 по линии 256, который является суммой основной частоты и всех шумов, не отфильтрованных элементом 202 цифрового прореживающего фильтра. В результате вычитания, на выходе фильтра - пробки 204 по линии 262 получают основную частоту вибрирующих расходных трубок, из которой отфильтровано большинство шумовых сигналов.
Параметры (весовые коэффициенты и значение подавления смещения) фильтра - пробки 204 определяют характеристики задерживания, а именно, ширину полосы задерживания и диапазон подавляемых частот, а также значение основной частоты. Эти параметры вычисляются элементом 210 весовой адаптации и прикладываются к фильтру - пробке 204 по линии 258.
Адаптивный фильтр - пробка 204 левого канала получает входной сигнал по линии 254 и выдает свой выходной сигнал по линии 260. Как это обсуждалось ранее, сигналы с выхода адаптивного фильтра - пробки 204 левого канала используются элементом весовой адаптации 210 в качестве сигнала обратной связи при определении коэффициентов обоих фильтров - пробок (адаптивных фильтров - пробок левого и правого каналов).
Весовые коэффициенты обоих фильтров - пробок (адаптивных фильтров - пробок левого и правого каналов) определяют при работе элемента весовой адаптации 210. На вход элемента весовой адаптации 210 поступает отфильтрованный сигнал, шумовая часть не отфильтрованного сигнала и градиент отфильтрованного сигнала с выхода левого канала адаптивного фильтра - пробки 204. Эти значения сигналов используются в зависящих от времени (итеративных) вычислениях для определения соответствующих коэффициентов фильтров - пробок. Полученные при этом коэффициенты управляют характеристиками задерживания. Как форма полосы задерживания (пробки), так и основная частота адаптированы для отслеживания изменений в основной частоте. Форма полосы задерживания (пробки) определяет скорость, с которой адаптивные фильтры - пробки могут сходиться при изменениях основной частоты. Более широкий фильтр - пробка обеспечивает меньшую фильтрацию, однако он подстраивается более быстро к изменениям основной частоты. Более узкий фильтр - пробка сходится медленнее при изменениях основной частоты, однако он обеспечивает лучшую фильтрацию входных сигналов датчика.
Следует иметь в виду, что в качестве сигнала обратной связи для элемента весовой адаптации 210 могут быть использованы выходные сигналы как левого, так и правого каналов. Хотя для элемента весовой адаптации 210 могут быть использованы выходные сигналы обоих каналов (левого и правого), это не дает значительных преимуществ, хотя приводит к увеличению сложности вычислений. Вне зависимости от того, откуда получены входные сигналы элементом весовой адаптации 210, вычисленные в нем параметры весовой адаптации прикладываются к адаптивным фильтрам - пробкам двух (левого и правого) каналов, так что обработка выходных каналов обоих сигналов датчика производится идентично. Использование единственного набора параметров, прикладыаемых как к левому, так и к правому каналам, позволяет поддерживать критическое фазовое соотношение между двумя каналами, причем основное значение, используемое для вычисления значения Δt, пропорционально массовому расходу.
Величины, вычисленные при помощи элемента весовой адаптации 210, используются также, как это обсуждалось ранее, для вычислений фазы и значения Δt.
На элемент 212 подаются коэффициенты от элемента весовой адаптации 210; этот элемент 212 производит определение основной частоты вибрирующих расходных трубок. Выработанные в элементе 212 частоты и весовая информация Гертцеля выдаются по линии 268.
Значения отфильтрованного сигнала с адаптивного фильтра - пробки 204 поступают на элемент вычисления фазы 206 по линии 262. На элемент вычисления фазы 206 подаются также веса Гертцеля и частотная информация по линии 268 от элемента 212 вычисления частоты. В элементе вычисления фазы 206 используется техника анализа Фурье с двумя окнами Ханнинга для определения фазы отфильтрованного сигнала. Длина окна является функцией номинальной или ожидаемой основной частоты расходных трубок. Длина окна определяет число периодов колебаний расходных трубок для каждого выбранного и взвешенного образца (выборки), чтобы получить фазу расходных трубок. Ожидаемая частота расходных трубок может быть запрограммирована в электронике в соответствии с настоящим изобретением во время изготовления расходомера или же может быть введена как параметр для конкретный установки/места ее применения, или же может быть найдена при работе расходомера и при проведении соответствующих измерений. Длина окна отображает компромисс между временем отклика и степенью подавления шумового сигнала и просачивания спектральных составляющих. Большее число периодов, накопленных для определения фазы, обеспечивает дополнительное подавление шума, однако требует дополнительной задержки для достижения причинности и, следовательно, большего времени отклика при изменениях фазовых соотношений вибрирующих расходных трубок. Меньшее число периодов уменьшает задержку и в результате повышает скорость отклика при изменениях фазовых соотношений вибрирующих расходных трубок, однако обеспечивает худшее подавление шумов. В качестве преимущественной длины окна выбраны восемь периодов расходных трубок. В предположении наличия ожидаемой частоты предпочтительный размер окна (2N) может быть определен как:
длина_окна = 2•floor (3200) (ожидаемая_частота_трубки)
где floor (х) представляет собой самое большое целое число, меньшее или равное x.
Окно Ханнинга может быть представлено как вектор весов, которые должны быть приложены к дискретным выборкам в течение периода окна Ханнинга. Если 2N представляет собой число дискретных выборок в течение одного периода окна Ханнинга, то вес для к-й дискретной выборки, где к лежит в диапазоне от 0 до 2N-1, может быть определен как:
h(k) = (1/2)(1-cos(2πk/(2N-1)))
Импульсный сигнал половины окна вырабатывается ЗГ 214 фиг. 2 и поступает по линии 274 фиг. 2 для каждых N дискретных выборок (причем полное окно Ханнинга квантованного выходного сигнала датчика имеет 2N дискретных выборок для единственного периода), для осуществления задач, которые далее обсуждаются более подробно и связаны с параллельными вычислениями перекрывающихся окон Ханнинга. Кроме того, ЗГ 214 фиг. 2 по линии 272 выдает показание счетчика SAMPNO. SAMPNO по линии 272 (по модулю N функции сигнала CLK) может быть от 0 до N - 1. Значение SAMPNO по линии 272 возрастает на 1 при каждом импульсе сигнала CLK. Когда значение SAMPNO достигает N - 1, то следующий импульс сигнала CLK от ЗГ 214 сбрасывает SAMPNO на нуль. Сигнал половины окна соответствует показанию SAMPNO, равному нулю. В соответствии с предпочтительным вариантом настоящего изобретения, возрастание показаний SAMPNO производится программным путем, когда производится подсчет числа дискретных прореженных выходных сигналов датчика, обработанных в течение окна Ханнинга. Программное нарастание показаний SAMPNO происходит асинхронно относительно фиксированной частоты, которая выдается ЗГ с кварцевой стабилизацией 214 фиг. 2 по линии 270.
Выборки сигнала на краях каждого окна имеют меньшие веса, чем выборки посредине окна. Для того чтобы наиболее более полно использовать имеющиеся в наличии данные, два вычисления Фурье производятся одновременно, таким образом, что окна перекрывают половину длины окна. Новое фазовое измерение Фурье осуществляется для каждой половины окна выборок.
Использование постоянного размера окна в соответствии с настоящим изобретением позволяет предварительно вычислять веса окна Ханнинга, до начала измерений потока. При использовании в сочетании с дискретным по времени преобразованием Фурье (DTFT), как это и предусмотрено в настоящем изобретении, размер окна определяет остроту характеристики выделения частоты на выходе фильтра DTFT. Это позволяет также повысить подавление шумов и псевдогармоник. К сожалению, при использовании более длинного размера окна получают медленный отклик фильтра на изменения фазы. Определенный выше размер окна поэтому представляет собой наилучшую известную аппроксимацию, позволяющую сбалансировать состязающиеся цели (улучшенное выделение частоты и подавление шума относительно скорости отклика на изменения фазы). Преимущественный размер окна может быть изменен для различных применений расходомера и оптимизирован для определенных условий окружающей среды.
Элемент вычисления фазы 206 производит суммирование отфильтрованных дискретных квантованных величин и вырабатывает комплексное число, несущее индикацию о фазе квантованного, отфильтрованного выходного сигнала датчика. Это комплексное число подается по линии 266 и используется в последующих вычислениях Δt. В частности, Фурье - преобразование фильтра Гертцеля применяется для каждого окна Ханнинга отфильтрованных, дискретных квантованных значений выходного сигнала датчика, как для левого, так и для правого канала. Коэффициенты фильтра Гертцеля находят при помощи элемента 212 вычисления частоты и подают по линии 268 на элемент 206 вычисления фазы.
Комплексное число с выхода элемента 206 вычисления фазы выдается по линии 266 и используется при вычислении Δt.
Элемент 206 вычисления фазы для левого канала работает идентично обсуждавшемуся ранее правому каналу. Выходной сигнал адаптивного фильтра - пробки 204 для левого канала выдается по линии 260. Элемент 206 вычисления фазы получает этот сигнал и выдает по линии 264 значения, индикативные относительно фазы сигнала левого канала.
Фазовую информацию как для левого, так и для правого каналов получают при работе элемента 206 вычисления фазы; эта информация поступает на элемент 208 вычисления Δt для левого канала по линии 264, а для правого канала по линии 266. Частотная информация, которая получена при работе элемента вычисления частоты 210, поступает на элемент 208 вычисления Δt по линии 268. Элемент 208 вычисления Δt определяет временную задержку, которую получают в результате фазового сдвига между выходными сигналами левого и правого датчиков и которая, в свою очередь, ориентировочно пропорциональна массовому расходу материала, протекающего через расходные трубки расходомера Кориолиса.
Данные Фурье - преобразования для левого канала умножают на сопряженные данные Фурье - преобразования для правого канала. Затем вычисляют угол комплексного результата. Этот угол разности фаз делят на частоту вибрации расходной трубки (преобразованную в соответствующие единицы измерения, чтобы совпадать с измерениями фазы) для получения значения Δt.
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ
На фиг. 17- 19 приведен обзор операций программного обеспечения при внедрении способов в соответствии с настоящим изобретением. На фиг. 17 описана работа части программы, которая работает в реальном масштабе времени при поступлении прерывания от АЦП 200 (фиг. 2). На фиг. 18 описана работа части программы, которая осуществляет дополнительную фильтрацию и обработку прореженных выборок, полученных в результате работы программы, описанной на фиг. 17. Прореженные выборки, полученные в результате работы программы фиг. 17, буферизуются, так что программа фиг. 18 может работать асинхронно по отношению к точным временным выборкам от АЦП 200. На фиг. 19 показаны некоторые дополнительные детали одного из элементов фиг. 18, которые включают в себя способы эвристики, позволяющие обеспечить стабильность и точность результирующих измерений массового расхода.
Программное обеспечение фиг. 17-19 реализовано в измерительном блоке 24 массового расходомера, который показан более подробно на фиг. 20. Цифровой сигнальный процессор (DSP) 2000 фиг. 20 представляет собой вычислительное устройство, которое во многом схоже с любым микропроцессором общего назначения, однако выполняет специфические функции, настроенные для решения задач обработки сигнала. Такие DSP процессорные устройства хорошо известны специалистам. В качестве примера такого устройства можно привести TMS 320C50-57 фирмы Texas Instruments. Это устройство представляет собой арифметический сигнальный процессор с фиксированной запятой. Предусмотрены библиотеки эмуляции программного обеспечения для осуществления точных вычислений с плавающей запятой. Это примерное устройство обеспечивает точность 32 бита, которая требуется для осуществления операций квантования и прореживания. Программа эмуляции плавающей запятой обеспечивает адекватные характеристики для большинства применений расходомера, хотя могут быть использованы и другие процессоры, если требуются дополнительные вычислительные параметры (возможности) с плавающей запятой для частного вида применения расходомера.
Процессор 2000 получает команды от программы ROM 2002 по шине 2052 и манипулирует данными и буферами в RAM 2004 по шине 2054. Специалисты в данной области легко поймут, что в зависимости от множества факторов стоимости и качества, может быть предпочтительно в некоторых обстоятельствах произвести копирование программных команд от ROM 2002 в RAM 2004 для улучшения качества работы процессора 2000 при получении команд.
Каждый АЦП 200 получает аналоговый сигнал от своего соответствующего датчика расходной трубки по соответствующей линии 157 и 158. Процессор 2000 выдает сигналы управления на два АЦП 200 по соответствующим линиям 250 и 252 и получает оцифрованные квантованные значения от двух АЦП 200 по соответствующим линиям 250 и 252. Процессор 2000 выдает сигналы управления на ЗГ 214 по линии 2050, чтобы получить частоту выборок двух АЦП 200. В ответ ЗГ 214 подает сигнал частоты выборок на два АЦП 200 по линии 270. Указанным образом процессор 2000 инициирует уставку частоты выборок двух АЦП 200 на заданное значение.
В соответствии с предпочтительным вариантом настоящего изобретения, АЦП 200 выполнены в виде одной микросхемы, содержащей множество преобразователей и единственную шину связи, подключенную к DSP процессору. Это помогает обеспечить зависимость фазы между двумя квантованными сигналами только от эффектов Кориолиса вибрирующих расходных трубок, а не от влияния разбалансировки между двумя физически разделенными схемами АЦП. Специалистам хорошо известны такие чипы стерео АЦП. Примером такого устройства является чип двухканального стерео АЦП типа CS5329 фирмы Cristal Semiconductors.
Процессор 2000 определяет соответствующую основную частоту, при которой вибрируют расходные трубки, и выдает пропорциональный сигнал по линии 2058. Схема возбудителя 2008 преобразует сигнал, полученный по линии 2058, в сигнал, подходящий для возбуждения расходных трубок, и прикладывает этот сигнал по линии 156. Известно множество способов и устройств возбуждения расходных трубок, поэтому данный вопрос не обсуждается более подробно.
Процессор 2000 также определяет значение Δt из разности фаз между квантованными каналами и прикладывает пропорциональный Δt сигнал по линии 2056. АЦП 2006 преобразует сигнал, поступающий по линии 2056, в аналоговый сигнал, пропорциональный массовому расходу, который выдается по линии 155. Сигнал по линии 155 подается на средства пользователя (не показаны) для конкретного случая применения расходомера.
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ (ОБРАБОТКА С ПРЕРЫВАНИЕМ В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ)
Как это отмечалось ранее, АЦП 200 работают на фиксированной частоте для создания точно расположенных по времени значений выборок выходных сигналов датчиков левой и правой расходных трубок. Как это показано на фиг. 17, необработанные величины выборок прореживаются при помощи двухкаскадного цифрового прореживающего фильтра 48:1. При использовании прореживающей фильтрации обеспечивается некоторое сглаживание (защита от наложения спектров) квантованных данных при уменьшении частоты выборок и, следовательно, вычислительной мощности, необходимой для применения фильтров - пробок и нахождения разности фаз и осуществления результирующего измерения Δt. Хорошо известная техника программирования может быть использована для формирования гнезда прерываний в ходе определенных (некоторых) менее критичных стадий вычислительной обработки, чтобы таким образом избежать любой возможной потери данных по причине сложности вычислений, в то время, когда производится обработка cигнала прерывания выборки при помощи АЦП 200. Например, кольцевая буферизация, подобная используемой в технике запоминающих устройств FIFO, может быть применена для сохранения дополнительных данных на время обработки предшествующих выборок. Указанные и другие виды техники буферизации хорошо известны специалистам и не требуют дальнейшего пояснения.
Элемент 1700 на фиг. 17 отображает наличие прерывания, создаваемого АЦП 200, для указания наличия оцифрованных выборок выходных сигналов датчиков как для левой, так и для правой из расходных трубок. Элемент 1702 работает при поступлении прерывания и считывает квантованные оцифрованные значения из АЦП 200 для каждого из выходных сигналов датчиков как для левой, так и для правой из расходных трубок (которые также именуются левым и правым каналами). Квантованные оцифрованные значения из АЦП 200 хранятся в первом каскаде кольцевого буфера, объединенном с каждым из левых и правых каналов. Каждый первый каскад канального кольцевого буфера имеет достаточную емкость для хранения значений выборок КИХ - фильтра. Фильтр первого каскада преимущественно представляет собой фильтр с 36 отпайками и поэтому для каждого канала требуется по меньшей мере 36 входов кольцевого буфера.
Элемент 1704 определяет, хранятся ли уже 8 новых выборок в кольцевом буфере первого каскада с момента последней свертки значений выборок, считанных из АЦП 200 при работе элемента 1702. Если 8 новых выборок еще не считаны, то тогда обработка этого прерывания АЦП 200 завершена. Если 8 новых выборок уже хранятся в кольцевом буфере первого каскада с момента последней свертки фильтра, то тогда включается в работу элемент 1706 для определения свертки 36 значений выборок, которые хранятся в данное время в кольцевом буфере первого каскада для каждого канала. Свернутое значение для каждого канала затем поступает на хранение во второй каскад кольцевого буфера, объединенный с каждым каналом. Каждый второй каскад канального кольцевого буфера имеет достаточную емкость для хранения значений выборок КИХ - фильтра. Фильтр второго каскада преимущественно представляет собой фильтр с 131 отпайкой и поэтому требуется по меньшей мере 131 вход кольцевого буфера для каждого канала.
Элемент 1708 производит определение наличия 6 новых значений во втором каскаде кольцевого буфера в результате работы элемента 1706. Если 6 новых значений от свертки первого каскада еще не накоплены во втором каскаде кольцевого буфера, то включается в работу элемент 1710 для нахождения свертки 131 значения, накопленного во втором каскаде кольцевого буфера для каждого канала. Сумма (свертка) значений второго каскада кольцевого буфера для каждого канала затем поступает на хранение в кольцевой буфер прореженных выборок, объединенный с каждым из каналов. В кольцевом буфере прореженных выборок каждого канала содержатся прореженные значения для объединенных с ним выборок левого или правого каналов. Буферы используются для удержания прореженных значений до тех пор, пока в результате асинхронной обработки, описанной ниже со ссылкой на фиг. 18, не начнется поиск величин для последующей фильтрации и обработки. Прореживающие вычисления являются достаточно простыми и могут быть обработаны при помощи программы обработки с прерыванием, показанной на фиг. 17. Дальнейшая обработка, которая связана с использованием фильтра - пробки для нахождения разности фаз и значений Δt, a также с адаптацией параметров фильтра, является более сложной и поэтому проистекает асинхронно относительно обработки в реальном масштабе времени, которая требуется для считывания значений выборок из АЦП 200. Специалисты в данной области легко поймут, что разделение задач между обработкой с прерыванием фиг. 17 и асинхронной обработкой фиг. 18 является вопросом выбора проектировщика, в зависимости от характеристик выбранного чипа DSP и желательного качества обработки при учете частоты выборок АЦП. За рамки настоящего изобретения не выходят различные эквивалентные виды программного обеспечения и объединенные с ними структуры данных.
Структура программного обеспечения, показанная на фиг. 17 - 19, описана далее в виде " псевдо - контуров", чтобы помочь в понимании настоящего изобретения. При этом описании псевдо - контуров сигнал CLK совпадает по частоте с каждой прореженной выборкой, полученной в результате обработки, описанной выше со ссылкой на фиг. 17. Другими словами, сигнал CLK имеет частоту, равную 1/48 частоты выборок. Как можно видеть из описания программного обеспечения фиг. 17 - 19, сигнал CLK просто указывает, что значения прореженных выборок имеются в наличии в кольцевых буферах прореженных выборок (более точно, пары значений прореженных выборок, по одному для левого и правого каналов). Имеющая большую вычислительную сложность фильтрация с использованием фильтра - пробки и нахождение разности фаз и значений Δt производятся асинхронно по отношению к точной частоте выборок, синхронизированной АЦП и объединенной с двухкаскадным прореживанием. Другими словами, обсуждающийся далее сигнал CLK преимущественно является ни чем иным, как индикацией того, что прореженная выборка имеется в наличии в кольцевом буфере прореженной выборки.
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ (АСИНХРОННАЯ ЦИФРОВАЯ ОБРАБОТКА СИГНАЛА)
На фиг. 18 показана блок-схема, отображающая асинхронную часть программного обеспечения, которая включается в работу после осуществления операций квантования и прореживания в реальном масштабе времени, описанных ранее со ссылкой на фиг. 17. Элемент 1800 фиг. 18 отображает любые виды обработки, необходимые для инициализации кольцевых буферов (первого каскада, второго каскада и прореженной выборки), которые используются для предварительной обработки квантованных данных двух каналов. Кроме того, элемент 1800 инициализирует любые аппаратные средства, объединенные с АЦП 200 фиг. 2, требующиеся для уставки фиксированной частоты выборок преобразователей (например, ЗГ 214) и для прерывания работы DSP при помощи АЦП 200, когда квантованное значение поступает от АЦП 200.
Элемент 1802 ожидает, пока пара значений прореженных выборок не появится в каждом из кольцевых буферов прореженных выборок (по одному для левого и правого каналов). При наличии пары значений прореженных выборок элемент 1804 включает в работу фильтр - пробку для усиления значения сигнала прореженной выборки. Сигнал усиливается за счет удаления нежелательного шума и гармоник частоты сигнала.
После этого включается в работу элемент 1806, который обновляет параметры фильтров - пробок. При помощи способов адаптации в соответствии с настоящим изобретением производится адаптация параметров фильтра - пробки для учета всех изменений основной частоты вибрирующих расходных трубок. В процессе адаптации фильтра - пробки используются эвристики для того, чтобы помочь обеспечить стабильность измерений потока, осуществляемых измерительным блоком 24. Эти эвристики далее обсуждаются более подробно. Обновленные параметры фильтра вводятся в фильтры - пробки.
После этого включается в работу элемент 1812 фиг. 18, который определяет, является ли выборка первой и находится ли эта выборка в начале периода новой половины окна (то есть SAMPNO = 0, что указывает, что все выборки предыдущей половины окна уже обработаны). Если выборка не является первой и не находится в начале периода новой половины окна, то тогда продолжается обработка при помощи элементов 1808 и 1810 с целью обновления параметров фильтра Гертцеля и для накопления значений энергии сигнала и шума. Если выборка является первой и находится в начале периода новой половины окна, то тогда при помощи элемента 1814 производится обработка, которая связана с завершением предыдущей половины окна, что обсуждается далее.
Элемент 1814 включается в работу в конце периода половины окна (старт периода новой половины окна) для определения отношения сигнал/шум (SNR) накопленных энергий усиленных выборок и накопленных энергий усиленных компонентов шума, полученных при работе элемента 1810, что обсуждается далее. Суммы накопленной энергии, полученные в результате работы элемента 1810, также сбрасываются при работе элемента 1814, чтобы подготовить накопление для начала периода выборок следующей половины окна Ханнинга. Тогда элемент 1816 проверяет, находится ли SNR выше приемлемого порога. В соответствии с настоящим изобретением преимущественный порог SNR для общих применений выбран равным пяти. Специалисты в данной области легко поймут, что преимущественный порог SNR может меняться в соответствии с потребностями для каждого вида применения и частных условий проведения измерений потока. Если значение SNR падает ниже заданного порога, то тогда индицируется SNR ошибочное состояние для предшествующего периода половины окна (для только что завершенной половины окна). Если элемент 1816 находит, что в предыдущей половине окна есть SNR ошибка, то тогда обработка продолжается в элементе 1818. В противном случае обработка продолжается в элементе 1820. Элемент 1818 производит сброс вычислений, задействованных в весовой адаптации фильтров - пробок. В частности, производится сброс параметра устранения смещения (α), коэффициента забывания (λ) и матрицы ковариантности (Р), что позволяет произвести вычисления повторно для обеспечения сходимости фильтра - пробки на основной частоте вибрирующих расходных трубок.
Затем включается в работу элемент 1820, который определяет Δt из комплексных чисел, несущих информацию о фазе сигнала для каждого канала в течение периода, непосредственно предшествующего значениям выборок. Другими словами, после каждого окна Ханнинга значений выборок (которые получают после каждой половины окна, как это обсуждалось выше) производят вычисление значения Δt из непосредственно предшествующих выборок окна Ханнинга, уменьшенных на комплексное число, несущее информацию о фазе каждого канала. Элемент 1820 также дополнительно определяет коэффициенты фильтра Гертцеля для следующего периода из накопленных параметров, вырабатываемых элементом 1808. Накопление параметра элементом 1808 также сбрасывается в начале нового периода. Затем в элементах 1808 и 1810 продолжается обработка для обновления параметров фильтра Гертцеля и накопления энергий сигнала и шума.
Элемент 1808 производит обновление параметров фильтра Гертцеля путем накопления усредненных весовых коэффициентов фильтра - пробки в течение периода половины окна. На границах периодов половины окна производится обновление весовых коэффициентов фильтра Гертцеля для подготовки обработки выборок в течение периода следующей половины окна. Элемент 1808 также вырабатывает усиленные квантованные значения и прикладывает эти усиленные квантованные значения к комплексному фильтру Гертцеля. Фильтр Гертцеля, как это указывалось ранее, вырабатывает комплексное число, накопленное для ряда значений форм колебаний выборок, которое является представительным для фазы форм колебаний. Это значение фазы накапливается как для левого, так и для правого каналов.
Как это обсуждалось ранее, фильтры Гертцеля используют для накопления комплексного числа, несущего информацию о фазе усиленного сигнала выборки каждого канала. Накопление проводится для ряда (числа) выборок, равного длине окна Ханнинга (которая обозначается 2N). Выборки в окне Ханнинга имеют ориентировочный диапазон 8 полных периодов колебаний соответствующего сигнала датчика расходной трубки. Чтобы использовать максимально данные выборок, параллельно производят вычисления в двух фильтрах Гертцеля для выборок каждого канала (то есть всего 4 вычисления, по 2 для левого и правого каналов). Два параллельных вычисления для одного канала осуществляют для одних и тех же усиленных значений выборок канала, но одно из вычислений начинают со сдвигом на половину длины окна Ханнинга (то есть со сдвигом на N выборок). Другими словами, параллельные вычисления в двух фильтрах Гертцеля для выборок одного канала разделены друг от друга во времени на половину периода окна Ханнинга выборок сигнала датчика вибрирующих расходных трубок.
Элемент 1810 производит накопление энергии усиленного сигнала и энергии шума значений выборок. Накопленные значения проверяются в конце половины окна (как это обсуждалось ранее в связи с элементом 1814) для того, чтобы определить, находится ли отношение сигнал/шум в желательных пределах.
Обработка продолжается затем при возврате по петле обратной связи в элементе 1802 при ожидании приема другого значения прореженной выборки.
На фиг. 19 показаны некоторые дополнительные детали работы элемента 1806, который обновляет параметры фильтра при подготовке обработки другого прореженного значения выборки. В дополнение к проверке SNR, которая обсуждалась выше при рассмотрении фиг. 18, в соответствии со способами настоящего изобретения используется другая эвристическая проверка, которая помогает предотвратить любую нестабильность при вычислениях (работе) фильтра - пробки.
Эвристическая проверка фиг. 19 позволяет определить, находятся ли вычисленные весовые параметры фильтра - пробки в заданном приемлемом диапазоне стабильности. Вновь вычисленные весовые параметры фильтра не будут использованы для следующей выборки, если они лежат вне приемлемого диапазона. В этом случае будут использоваться прежние значения весовых параметров, которые вычислены для значений предшествующих выборок, до тех пор, пока в результате вычислений не будут получены приемлемые весовые параметры.
Элементы 1902 - 1908 используются для нахождения из текущих значений выборки обновленного коэффициента забывания, обновленного коэффициента усиления, обновленного параметра устранения смещения и обновленной матрицы ковариантности. Затем включается в работу элемент 1910, который определяет обновленные весовые параметры фильтра - пробки, задаваемые предшествующими весовыми параметрами (вычисленными при обработке предшествующей выборки), а также вектор усиления и значения параметра устранения смещения, определенные при работе элементов 1902 - 1908. Как это обсуждалось ранее для фиг. - 18, когда отношение усиленного сигнала к шуму ниже допустимого порога, то вычисления, связанные с обновлением коэффициентов, сбрасываются для того, чтобы начать операцию сходимости полосы задерживания фильтра - пробки на сдвинутую основную частоту расходных трубок.
Элемент 1912 производит оценку стабильности вновь вычисленных весовых коэффициентов, которые должны попадать в заданный диапазон приемлемых значений. Если вновь вычисленные весовые коэффициенты находятся в приемлемом диапазоне, то элемент 1914 присваивает новые весовые коэффициенты фильтрам - пробкам при подготовке к обработке следующих прореженных значений. Если вновь вычисленные весовые коэффициенты не находятся в приемлемом диапазоне, то они не присваиваются фильтрам - пробкам, а вновь используются предшествующие весовые коэффициенты (вычисленные при обработке предшествующей выборки) для следующего прореженного значения.
ПЕРВЫЙ ПРЕДПОЧТИТЕЛЬНЫЙ ВАРИАНТ
В первом предпочтительном варианте настоящего изобретения использованы два адаптивных фильтра - пробки, один для фильтрации дискретных квантованных выборок от левого канала, а второй - для правого канала. Вычисления весовой адаптации позволяют настроить параметры пробки (полосы задерживания) для обоих фильтров - пробок, путем выборки сигналов, связанных с обработкой левого канала.
На фиг. 3 показаны более подробно некоторые элементы фиг. 2 для того, чтобы отобразить дополнительные детали, относящиеся к потоку информации между вычислительными элементами фиг. 2. Вычислительными элементами 204 являются адаптивные фильтры - пробки, показанные и описанные ранее со ссылкой на фиг. 2. На адаптивный фильтр - пробку 204 левого канала поступают прореженные выборки выходного сигнала датчика (хL) по линии 254 (фиг. 2). Весовые коэффициенты (W) функции передачи фильтра - пробки поступают по линии 258 от элемента 210 весовой адаптации. Параметр устранения смещения (α), который определяет форму полосы задерживания (пробки), также поступает по линии 258 от элемента 210 весовой адаптации. На адаптивный фильтр - пробку 204 правого канала поступают прореженные выборки выходного сигнала датчика (xR) по линии 256 (фиг. 2); этот фильтр 204 работает идентично адаптивному фильтру - пробке 204 левого канала. На адаптивные фильтры - пробки как левого, так и правого каналов поступают одинаковые параметры адаптации (W и α) по линии 258 от элемента 210 весовой адаптации.
Адаптивные фильтры - пробки как левого, так и правого каналов вырабатывают на их соответствующих выходах 260 и 262 усиленные сигналы, отображающие дискретные значения выборок. Усиленные сигналы eL и eR соответственно для левого и правого каналов отображают объединенный входной сигнал выборок, отфильтрованный от всех шумовых сигналов, но для узкой полосы частот вблизи от основной частоты вибрирующих расходных трубок.
На линии 260 получают выходной сигнал адаптивного фильтра - пробки 204 левого канала, который отображает шумовую порцию выборок входного сигнала (nL) и значение вектора градиента выборки входного сигнала (Ψ). Эти значения сигнала (eL, nL и Ψ) используются элементом весовой адаптации 210 для определения параметров весовой адаптации для следующей настройки фильтра - пробки. Адаптивные фильтры - пробки 204 как левого, так и правого каналов вычисляют одни и те же функции, однако значения шума и градиента от адаптивного фильтра - пробки правого канала в устройствах и способах в соответствии с настоящим изобретением не используются. На практике не производят вычисление не используемых сигналов адаптивного фильтра - пробки правого канала 204 в программном обеспечении DSP в соответствии с предпочтительным вариантом настоящего изобретения. Функции, которые вырабатываются при помощи адаптивного фильтра - пробки 204, далее обсуждаются более подробно.
Значения усиленного сигнала от левого и правого каналов адаптивных фильтров - пробок 204 подаются по соответствующим линиям 260 и 262 на элементы 206 вычисления фазы. Элементы 206 вычисления фазы вырабатывают фазы синусоидальных сигналов, отображенных усиленными сигналами дискретных выборок, поступающими на их соответствующие входы по линиям 260 и 262.
Элементы 206 вычисления фазы с Фурье - преобразованием используют весовой метод с окном Ханнинга для суммирования 2N дискретных взвешенных выборок для каждого канала, которые отображают 8 периодов соответствующих синусоидальных входных сигналов. Как это обсуждалось ранее, различные вычислительные элементы в соответствии с настоящим изобретением производят соответствующие вычисления для данных, принятых в течение половины периода окна Ханнинга (выборки 0...N - 1). Значение SAMPNO, которое свидетельствует о наличии определенной выборки в текущем периоде половины окна, поступает на входы элементов вычисления фазы 206 по линии 272. Значение SAMPNO используется как показатель вектора весов, приложенных к усиленным значениям выборок сигнала для первой и второй половин окна Ханнинга. Указанные весовые методы используются в элементах вычисления фазы 206, которые обсуждаются ниже.
Элементы 206 вычисления фазы применяют Фурье - преобразования фильтра Гертцеля к значениям отфильтрованных дискретных выборок сигнала для определения фазы синусоидального сигнала для каждого из каналов системы. Коэффициенты фильтра Гертцеля (комплексное число В - а) подаются на элементы вычисления фазы 206 по линии 268 от элемента 212 вычисления частоты. Фильтр Гертцеля обрабатывает выборки в каждом окне Ханнинга для выработки комплексного числа, отображающего фазу выборок синусоидальных выходных сигналов датчика.
Значения комплексного числа, вырабатываемые элементами вычисления фазы 206, выдаются по линиям 264 и 266 для левого и правого каналов соответственно. На элемент 208 вычисления Δt по линиям 264 и 266 поступают комплексные числа, которые несут информацию о фазе сигналов выборки, соответствующих сигналам левого и правого каналов. Элемент 208 вычисления Δt no линии 268 получает от элемента вычисления частоты 212 число (Ω), отображающее ток основной частоты вибрирующих расходных трубок.
Для того чтобы наиболее полно использовать имеющиеся в наличии данные от каждого канала, вычисления фазы, частоты и Δt производят для каждой половины окна (половины длины окна Ханнинга, как это определено ранее). Два параллельных вычисления фазы производят для отфильтрованных дискретных входных значений выборок по каждому каналу. Каждое из двух параллельных вычислений осуществляют однократно для каждого полного окна отфильтрованных значений дискретных выборок. Параллельные вычисления смещены друг от друга по времени на период, который соответствует числу выборок, равному половине длины окна Ханнинга. Так как два вычислительных элемента смещены друг от друга на половину длины окна Ханнинга, то одно из двух параллельных вычислений завершается в течение каждого периода половины окна для каждого канала. Поэтому в течение каждого периода половины окна завершается вычисление новой фазы, частоты и Δt, которые используются при измерениях массового расхода.
Элемент весовой адаптации 210 фиг. 2 показан разделенным на 4 субэлемента, а именно, на элемент 300 обнаружения ошибки SNR, на элемент вычисления весового коэффициента фильтра - пробки 302, на элемент вычисления вектора усиления 304 и на элемент вычисления параметра устранения смещения 306.
На элемент 300 обнаружения ошибки SNR поступают значения усиленного сигнала (eL) и шумовая компонента не отфильтрованных значений выборок (nL), которые вырабатываются фильтром - пробкой левого канала 204 и подаются по линии 260. Элемент 300 обнаружения ошибки SNR определяет, лежит ли отношение энергий значения усиленного сигнала (eL) к шумовой компоненте не отфильтрованных значений выборок (nL) ниже порогового уровня. Падение отношения сигнал/шум ниже заданного порогового уровня обычно свидетельствует о том, что фильтр - пробка 204 не сходится на основной частоте вибрирующих расходных трубок. Если обнаружено отношение сигнал/шум ниже порога, то вырабатывается сигнал SNR FAULT, который выдается по линии 350 фиг. 3 с выхода элемента 300 обнаружения ошибки SNR. Как указано далее, сигнал SNR FAULT, который выдается по линии 350, используется другими вычислительными элементами в рамках элемента 210 весовой адаптации для повторного начала вычислений, используемых для адаптации фильтра - пробки и для обеспечения сходимости полосы задерживания (пробки) на основной частоте вибрирующих расходных трубок. Описание точного вычисления и детали построения элемента 300 обнаружения ошибки SNR представлены ниже со ссылкой на фиг. 7.
На элемент 302 вычисления весового коэффициента фильтра - пробки подается компонента шума не отфильтрованных значений выборки (nL), вырабатываемых фильтром - пробкой 204 левого канала и поступающих по линии 260. На элемент 302 по линии 352 поступают также значения вектора усиления (вектор К - а, состоящий из двух элементов), вырабатываемые элементом вычисления вектора усиления 304. Кроме того, на элемент 302 по линии 354 поступает обновленный параметр устранения смещения (α′), вырабатываемый элементом вычисления параметра устранения смещения 306. Затем элемент 302 вычисления весового коэффициента фильтра - пробки вычисляет обновленные значения весов (W) фильтра - пробки и по линии 258 выдает их для использования фильтрами - пробками 204 и элементом вычисления частоты 212. Детали точного вычисления и подробности построения элемента 302 вычисления весового коэффициента фильтра - пробки изложены далее со ссылкой на фиг. 6.
На элемент вычисления вектора усиления 304 по линии 260 поступает градиент (Ψ), вырабатываемый фильтром - пробкой 204 левого канала. На элемент усиления 304 по линии 350 поступает также сигнал SNR FAULT, вырабатываемый элементом 300 обнаружения ошибки SNR. Кроме того, на элемент усиления 304 по линии 356 поступает также коэффициент забывания (λ), вырабатываемый элементом вычисления параметра устранения смещения 306. Элемент вычисления вектора усиления 304 вычисляет затем обновленные значения вектора усиления (К) и выдает их по линии 352 для использования элементом 302 вычисления весового коэффициента фильтра - пробки. Детали точного вычисления и подробности построения элемента 304 вычисления вектора усиления изложены далее со ссылкой на фиг. 5.
На элемент вычисления параметра устранения смещения 306 по линии 350 подается сигнал SNR FAULT, вырабатываемый элементом 300 обнаружения ошибки SNR. Затем элемент вычисления параметра устранения смещения 306 вычисляет обновленные значения параметра устранения смещения (α) и выдает их по линии 258 для использования фильтрами - пробками 204. Элемент вычисления параметра устранения смещения 306 вычисляет также обновленный параметр устранения смещения (α′) и выдает его по линии 354 для использования элементом 302 вычисления весового коэффициента фильтра - пробки. Кроме того, элемент вычисления параметра устранения смещения 306 вычисляет также обновленный коэффициент забывания (λ) и выдает его по линии 356 для использования элементом 304 вычисления вектора усиления. Детали точного вычисления и подробности построения элемента вычисления параметра устранения смещения 306 изложены далее со ссылкой на фиг. 8.
Элемент вычисления частоты 212 фиг. 3 показан состоящим из двух субэлементов, в именно, из элемента 308 вычисления весов фильтра Гертцеля и волновода 310 коэффициента половины окна.
Элемент 308 вычисления весов фильтра Гертцеля получает на входе по линии 258 веса фильтра - пробки, которые определены при работе элемента 210 весовой адаптации. Элемент 308 вычисления весов фильтра Гертцеля определяет затем веса (В') фильтра Гертцеля в виде комплексного числа, а также определяет частоту (Ω′) синусоидального выходного сигнала расходной трубки, отображенного значениями сигнала дискретных выборок и содержащуюся в весах фильтра - пробки. Оба указанных значения вычислены на конце каждого периода половины окна, указанного сигналом половины окна, который поступает по линии 274 от ЗГ 214 фиг. 2. Полученные веса Гертцеля и частота выдаются по линии 358 для использования в волноводе 310 коэффициента половины окна. Детали точного вычисления и подробности построения элемента вычисления весов фильтра Гертцеля 308 изложены далее со ссылкой на фиг. 9.
На волновод 310 коэффициента половины окна поступают веса (В') фильтра Гертцеля и частота (Ω′), которые вычислены указанным выше образом при помощи элемента 308 вычисления весов фильтра Гертцеля. Волновод 310 коэффициента половины окна производит настройку синхронизации вычисленных значений (В' и Ω′) для их объединения с одним из двух параллельных вычислений перекрывающихся половин окна. Детали точного вычисления и подробности построения волновода 310 коэффициента половины окна изложены далее со ссылкой на фиг. 10.
Как это упоминалось ранее, вычисления, которые осуществляются элементами, показанными на фиг. 3 (и на других чертежах, которые обсуждаются далее более подробно), преимущественно осуществляются с использованием арифметических операций с плавающей запятой, что позволяет поддерживать точность в широком диапазоне цифровых вычислений. Функции вычисления с плавающей запятой могут быть осуществлены при помощи аппаратных средств в рамках сигнального процессора 2000 фиг. 20 или же могут быть эмулированы процессором 2000 с использованием функций библиотеки программного обеспечения. Факторы качества и стоимости определяют выбор между аппаратными средствами с плавающей запятой и программным обеспечением в зависимости от конкретного вида применения настоящего изобретения.
ПЕРВЫЙ ПРИМЕР ПОСТРОЕНИЯ - ФИЛЬТРА - ПРОБКИ
На фиг. 4 приведены дополнительные детали, касающиеся функций адаптивных фильтров - пробок 204 фиг. 3 и осуществления в них вычислений. Оба фильтра - пробки 204, один из которых подключен к левому, а другой - к правому каналу, идентичны по структуре и по осуществлению в них вычислений. На адаптивный фильтр - пробку левого канала 204 поступают в виде входного сигнала по линии 254 прореженные значения дискретных временных выборок сигнала датчика, а его отфильтрованный выходной сигнал получают по линии 260. На адаптивный фильтр - пробку правого канала 204 поступают в виде входного сигнала по линии 256 прореженные значения дискретных временных выборок сигнала датчика, а его отфильтрованный выходной сигнал получают по линии 262.
На адаптивный фильтр - пробку 204 по линии 258 подаются также текущие веса (W, в виде двухэлементного вектора W1 W2) и параметр устранения смещения (α) от элемента весовой адаптации 210 фиг. 3. Адаптивный фильтр - пробка 204 вырабатывает квадрат параметра устранения смещения (α2) за счет его приложения по линии 258 на оба входа умножающего соединения 446, выходной сигнал которого получают по линии 488.
Часть элементов адаптивного фильтра - пробки 204 фиг. 4, которая обведена пунктиром, использована для вычисления градиента выборок входного сигнала Ψ, в виде состоящего из двух элементов вектора, отображенного как Ψ1, Ψ2 Вычисленные указанным образом значения градиента подаются по линии 260 на адаптивный фильтр - пробку 204 левого канала. Градиент используется в элементе весовой адаптации 210 фиг. 3 для вычисления обновленных весов фильтра - пробки для следующей выборки, полученной по линии 254. Элементы в обведенном пунктиром квадрате фиг. 4, которые используются для вычисления градиента, не используются в адаптивном фильтре - пробке 204 правого канала.
Адаптивный фильтр - пробка 204 фиг. 4 производит определение наличия шума в значениях дискретных входных выборок. Вычитание значений шумового сигнала из значений входных выборок позволяет получить на линии 260 усиленный отфильтрованный выходной сигнал. Адаптивный фильтр - пробка 204 позволяет получать усиленное значение сигнала e при помощи фильтра второго порядка с полиномным и матричным арифметическим устройством, как это показано далее (где переменная (t), использованная в приведенных ниже выражениях, указывает значение переменной, соответствующей периоду выборки "t"):
x(t) - значение входного сигнала, полученное по линии 254 (256 для правого канала);
A(t) = diag(α(t),(α(t)2) - диагональная матрица устранения смещения;
W(t)=[W1(t), W2(t)] - вектор весов;
Y(t)=[у(t-l), у(t-2)] - вектор состояния рекурсивного фильтра;
у(t)=x(t) + W(t) A(t)Y(t) - промежуточное вычисление;
n(t)=у(t)-W(t)Y(t) - шумовые сигналы, выделенные из входного сигнала x;
e(t)= x(t)-n(t) - усиленный сигнал = входной сигнал x - шумовой сигнал n.
Псевдо - контуры фиг. 4 описывают указанные выражения в виде цепей и вычислительных элементов. Суммирующее соединение 400 осуществляет суммирование значения входного сигнала x по линии 254 (256 для правого канала) и промежуточного вычислительного значения по линии 452 (отображающего WAY, как это указано выше), для получения по линии 450 значения у=x+WAY, как это указано выше. Значение y по линии 450 поступает на вход схемы задержки 408, где происходит задержка на один период синхросигнала выборки (CLK), а после задержки выдается по линии 460. Задержанное значение y по линии 460 подается на вход схемы задержки 436, где происходит задержка на второй период синхросигнала выборки (CLK), а после этой задержки выдается по линии 468. Задержанное значение y по линии 460 и дважды задержанное значение y по линии 468 отображают указанный выше вектор Y.
Диагональная матрица устранения смещения A включает в себя параметр устранения смещения и его квадрат (α(t) и (α(t)2), поступающие по соответствующим линиям 258 и 488. Вектор Y на линиях 460 и 468 умножается на диагональную матрицу устранения смещения A, которая поступает по линиям 258 и 488 через соответствующие умножающие соединения 406 и 434, что позволяет получить AY на соответствующих линиях 458 и 470. Это произведение в свою очередь умножается на вектор весов W, который поступает по линии 258 через соответствующие умножающие соединения 404 и 432, что позволяет получить промежуточные вычислительные значения по соответствующим линиям 456 и 454. Два промежуточных значения по соответствующим линиям 456 и 454 поступают на суммирующее соединение 402, что позволяет получить скалярное значение WAY, указанное выше, по линии 452.
Вектор Y на линиях 460 и 468 также умножается на весовой вектор W по линии 258 через соответствующие умножающие соединения 414 и 438, что позволяет получить промежуточные вычислительные значения по соответствующим линиям 464 и 466. Два промежуточных значения на линиях 464 и 466 суммируются при помощи суммирующего соединения 416, что позволяет получить значение WY на линии 462.
Суммирующее соединение 412 позволяет вычесть значение WY по линии 462 из значения у по линии 450 для получения шумового значения n = y - WY по линии 470. В адаптивном фильтре - пробке 204 левого канала это значение, которое отображает шумовую порцию значений входных выборок x, выдается по линии 260 для использования в элементе весовой адаптации 210 фиг. 3.
Суммирующее соединение 410 позволяет вычесть значение шума n на линии 470 из значения входной выборки x на линии 254 (256 для правого канала) для получения усиленного значения сигнала e = x-n на линии 260 (262 для правого канала). Усиленное значение сигнала используется в последующих элементах 206 вычисления фазы и в последующем элементе 210 весовой адаптации 210, как это обсуждается ниже.
Кроме значения шума n и усиленного значения сигнала e адаптивный фильтр - пробка 204 производит вычисление вектора градиента Ψ в виде Ψ1 и Ψ2 на линии 260. Адаптивный фильтр - пробка 204 производит определение вектора градиента Ψ при помощи полиномного и матричного арифметического устройства фильтра второго порядка следующим образом:
F(t)=[f(t-1), f(t-2)]Т - вектор состояния рекурсивного фильтра;
f(t)=n(t)+W(t)A(t)F(t) - промежуточное вычисление;
Ψ(t) = Y(t)-A(t)F(t) - вектор градиента.
Суммирующее соединение 418 добавляет шумовое значение n на его входной линии 470 к промежуточному значению вычисления WAF на его входной линии 474 для получения f=n+WAF на линии 472. Значение f на линии 472 подается на вход схемы задержки 420, где задерживается на один период ЗГ (CLK), а затем выдается по выходной линии 476. Значение f с однократной задержкой на линии 476 подается на вход схемы задержки 430 и задерживается на второй период ЗГ (CLK), а затем выдается по выходной линии 484. Однократно задержанное значение f на линии 476 и двукратно задержанное значение f на линии 484 отображают указанный выше вектор F.
Вектор F на линиях 476 и 484 умножается на диагональную матрицу устранения смещения A, которая подается по линиям 258 и 488 через соответствующие умножающие соединения 426 и 442, что позволяет получить AF на соответствующих линиях 478 и 486. Это произведение в свою очередь умножается на весовой вектор W, который поступает по линии 258 через соответствующие умножающие соединения 424 и 440, что позволяет получить промежуточные вычислительные значения на соответствующих линиях 480 и 482. Два промежуточных значения на соответствующих линиях 480 и 482 прикладываются к суммирующему соединению 422, что позволяет получить скалярное значение WAF на линии 472, как это описывалось ранее.
Промежуточное произведение AF на линиях 478 и 486 вычитается из вектора Y на линиях 460 и 468 через суммирующие соединения 428 и 444, что позволяет
получить вектор градиента Ψ(Ψ1,Ψ2) = Y-AF и выдать его по линии 260. Вектор градиента на линии 260 используется элементом весовой адаптации 210 фиг. 3 для вычисления обновленных весов фильтра - пробки.
Адаптивные фильтры - пробки левого и правого каналов 204 работают указанным выше образом. Вычисление вектора градиента Ψ и шумового значения n на линии 260 не является необходимым в правом канале и может быть опущено при проведении вычислительной операции правого канала. Элементом весовой адаптации 210 используются значения только от левого канала, которые поступают по линии 260 для настройки весовых коэффициентов для обоих адаптивных фильтров - пробок 204. От правого канала используется только значение e усиленного сигнала, которое подается по линии 262 для использования в элементах вычисления фазы 206.
ПЕРВЫЙ ПРИМЕР ПРИМЕНЕНИЯ - ВЕСОВАЯ АДАПТАЦИЯ
На элемент весовой адаптации 210 фиг. 3 поступает значение eL усиленного сигнала, шумовая порция не отфильтрованного входного сигнала nL и градиент Ψ, причем все эти данные вырабатываются адаптивным фильтром - пробкой 204 левого канала и подаются по линии 260. Элемент весовой адаптации 210 затем определяет вектор весов W и параметр α устранения смещения, которые подаются на линию 258 для регулировки фильтров - пробок обоих каналов для следующего дискретного значения выборки, которое должно быть обработано адаптивным фильтром - пробкой 204. Для упрощения описания функций весовой адаптации элемент весовой адаптации 210 разделен на четыре субэлемента, каждый из которых выполняет только часть полного вычисления, а именно, на элемент 300 обнаружения ошибки SNR, на элемент вычисления весового коэффициента фильтра - пробки 302, на элемент вычисления вектора усиления 304 и на элемент вычисления параметра устранения смещения 306.
На элемент 300 обнаружения ошибки SNR, который показан более подробно на фиг. 7, поступают значения усиленного сигнала (eL) и шумовая компонента не отфильтрованных значений выборок (nL), которые вырабатываются фильтром - пробкой левого канала 204 и подаются по линии 260. Элемент 300 обнаружения ошибки SNR определяет, лежит ли отношение энергий значения усиленного сигнала (eL) к шумовой компоненте не отфильтрованных значений выборок (nL) ниже порогового уровня, как это обсуждалось ранее. Детали построения элемента 300 обнаружения ошибки SNR представлены на фиг. 7.
Элемент 300 обнаружения ошибки SNR фиг. 7 производит определение отношения сигнал/шум путем суммирования энергии шума и суммирования энергии с устраненным шумом, с последующим сравнением этого отношения с заданными пороговыми значениями. Элемент 300 обнаружения ошибки SNR получает значения усиленного сигнала eL и шумовой сигнал nL по линии 260 от левого канала.
Значение шумового сигнала подается на оба входа умножающего соединения 700 для получения квадрата шумового сигнала n2 и приложения его по линии 750. Значение n2 по линии 750 поступает на один вход 2:1 мультиплексора 704 и на один из входов суммирующего соединения 706. Выходной сигнал мультиплексора 704 подается на вход регистра 712 по линии 758. Регистр 712 хранит это значение на своем входе при синхронизации от ЗГ выборок CLK. Текущее значение с выхода регистра 712 по линии 764 подается на другой вход суммирующего соединения 706. Выходная сумма с суммирующего соединения 706 подается по линии 754 на другой вход мультиплексора 704. В начале периода половины окна, сигнал которого получают по линии 274, мультиплексор 704 производит выбор по линии 750 своего входа, подключенного к значению n2, и вновь начинает суммирование энергии шума для нового периода половины окна. Для всех других выборок в течение периода половины окна мультиплексор 704 производит выбор по линии 754 своего входа, чтобы произвести накопление шумовой энергии. Накопление шумовой энергии для каждой выборки в течение периода половины окна производится в регистре 712; она выдается по линии 764. Накопление суммы возобновляется для каждого нового периода половины окна.
Энергия сигнала с устраненным шумом накапливается аналогично путем возведения в квадрат и накопления значений усиленного сигнала, получаемых по линии 260. Энергия сигнала с устраненным шумом накапливается при работе умножающего соединения 702, суммирующего соединения 710, мультиплексора 708 и регистра 714, на линиях 752, 756, 760 и 762, аналогично описанному выше для накопления энергии шума. Энергия сигнала с устраненным шумом, которая накоплена в течение каждого периода половины окна значений выборок, выдается на выходе регистра 714 по линии 762.
Вычислительный элемент 716 получает по линии 764 накопленную энергию шума и по линии 762 накопленную энергию с устраненным шумом и сравнивает отношение с заданными пороговыми значениями. Отношение значения накопленной энергии с устраненным шумом к значению накопленной энергии шума представляет собой отношение сигнал/шум. Если это отношение падает ниже заданного порога, то детектируется состояние ошибки отношения сигнал/шум и соответствующий сигнал появляется на выходе вычислительного элемента 716.
На вход элемента синхронизации ошибки 718 по линии 766 подается сигнал ошибки, вырабатываемый вычислительным элементом 716; на другой вход элемента 718 подается сигнал половины окна по линии 274. При наличии состояния ошибки на входной линии 766 элемент синхронизации ошибки 718 выдает по линии 350 импульсный сигнал SNR FAULT. Сигнал SNR FAULT по линии 350 поступает на другие субэлементы внутри элемента весовой адаптации 210 для сброса вычислений различных параметров фильтра - пробки. Вслед за выработкой сигнала SNR FAULT элемент синхронизации ошибки 718 вырабатывает промежуток паузы, в течение которого не вырабатываются дополнительные сигналы кроме сигнала SNR FAULT на линии 350. Промежуток паузы предназначается для того, чтобы иметь достаточное время для того, чтобы установить параметры фильтра - пробки в соответствии с основной частотой вибрирующих расходных трубок. Элемент синхронизации ошибки 718 также вырабатывает промежуток паузы при включении питания, что позволяет фильтрам - пробкам перекрыть основную частоту. Промежуток паузы при включении питания ориентировочно равен 100 периодам половины окна. Промежуток паузы при обнаружении SNR FAULT ориентировочно равен 66 периодам половины окна.
На элемент вычисления весовых коэффициентов фильтра - пробки 302, который более подробно показан на фиг. 6, поступает шумовая компонента не отфильтрованных значений выборки (nL), которая вырабатывается фильтром - пробкой 204 левого канала и подается по линии 260. На элемент 302 по линии 352 подаются также значения вектора усиления (К), которые вырабатываются элементом вычисления вектора усиления 304. Кроме того, на элемент 302 по линии 354 подаются также значения обновленного параметра устранения смещения (α′), которые вырабатываются элементом 306 вычисления параметра устранения смещения. Затем элемент вычисления весовых коэффициентов фильтра - пробки 302 производит вычисление обновленных значений весов (W) фильтра - пробки и прикладывает их по линии 258 для использования фильтрами - пробками 204 и элементом вычисления частоты 212.
Элемент вычисления весовых коэффициентов фильтра - пробки 302 производит вычисление обновленных значений весов (W) для адаптивных фильтров - пробок 204 при помощи арифметической матрицы следующим образом:
W' = W(t)+n(t)K(t) - вектор обновленных весов при наличии стабильности;
W' = W(t) - при нестабильности веса не обновляются.
Умножающие соединения 602 и 604 производят умножение вектора усиления К(К1К2) по линии 352 на компоненту шума (n) выборки сигнала, поступающей по линии 260, для получения произведения nК по линиям 650 и 656. Произведение по линии 650 подается на суммирующее соединение 606. На другой вход суммирующего соединения 606 по линии 652 подается ранее вычисленный вес W1. На выходе суммирующего соединения 606 по линии 654 получают W1+nK1, который подается на нормально выбранный вход мультиплексора 616. Сигнал с выхода мультиплексора 616 по линии 670 подается на нормально выбранный вход мультиплексора 624. Это входное значение нормально проходит через мультиплексор 624 на выходную линию 674 и поступает на вход схемы задержки 620 и на шину 258 в виде следующего обновленного значения W'1 (где W'1 представляет собой значение Wx, которое должно быть использовано для следующего принятого значения выборки) для использования при вычислениях весов Гертцеля в элементе 308. Коэффициент W1 с однократной задержкой от схемы задержки 620 подается по шине 258 для использования в фильтре - пробке 204. Нормально не выбранный вход мультиплексора 624 по линии 676 выбирается при помощи сигнала RESET системы для того, чтобы приложить нулевое значение (0) в качестве инициирующего значения веса W1.
Другое частичное произведение по линии 656 подается на суммирующее соединение 608. На другой вход суммирующего соединения 608 по линии 666 подается ранее вычисленный вес W2. На выходе суммирующего соединения 608 получают значение W2+n2K, которое по линии 660 подается на нормально выбранный вход мультиплексора 618. Выходной сигнал мультиплексора 618 по линии 672 подается на нормально выбранный вход мультиплексора 626. Это входное значение нормально пропускается через мультиплексор 626 и поступает с его выходной линии 676 на вход схемы задержки 622, а также на шину 258 в качестве следующего обновленного значения W'2, для использования при вычислении весов Гертцеля в элементе 308. Коэффициент (W2) с однократной задержкой от схемы задержки 622 поступает на шину 258 как W2 для использования в фильтрах - пробках 204. Нормально не выбранный вход мультиплексора 626 по линии 678 выбирается сигналом системы RESET для выдачи значения отрицательного значения единицы (-1) в качестве начального значения веса W2.
Умножающее соединение 600 по линии 354 получает на оба входа обновленный параметр устранения смещения α′ (где α′ указывает значение α, которое следует использовать для следующего принятого значения выборки) и на своей выходной линии 658 вырабатывает α′2. Умножающее соединение 610 по линии 354 получает на один из своих входов параметр устранения смещения α′, a на другой вход по линии 654 обновленный вес W1, и на своем выходе 662 вырабатывает произведение α′W1. Умножающее соединение 612 по линии 658 получает на один из своих входов квадрат параметра устранения смещения α′2, а на другой вход по линии 660 обновленный вес W2, и на своем выходе 664 вырабатывает произведение α′2W2. На элемент проверки устойчивости (стабильности) 614 по линии 662 поступает первый параметр X = α′W1, a по линии 664 второй параметр Y = α′2W2. Элемент проверки стабильности 614 производит оценку параметров Х и Y и вырабатывает выходной сигнал а, если условия проверки удовлетворяются. Выходной сигнал а получают в том случае, если и только если:
|Y| < 1 и |X| < 1-Y
Эта проверка ограничивает нахождение полюсов фильтра - пробки в пределах единичного круга для обеспечения устойчивости фильтра - пробки 204 и, в результате, действенности результирующих измерений массового расхода. Выходной сигнал с элемента проверки устойчивости 614 поступает на выбранные входы мультиплексоров 616 и 618 по линии 668. На нормально не выбранный вход мультиплексоров 616 и 618 поступают соответствующие ранее подсчитанные значения W1 и W2. Если обновленные веса фильтра - пробки не удовлетворяют условиям проверки на стабильность, осуществляемой элементом 614, тона выходной линии 668 элементом проверки вырабатывается нулевой выходной сигнал. При поступлении по линии 668 нулевого выходного сигнала мультиплексоры 616 и 618 передают значения со своих соответствующих нормально не выбранных входов по линиям 652 и 666 на их соответствующие выходные линии 670 и 672, так что ранее вычисленные значения соответствующего коэффициента используются повторно для следующих значений выборок. Другими словами, весовой вектор не будет изменен по сравнению с последними вычисленными стабильными значениями, пока элемент проверки стабильности 614 указывает на нестабильность вычислений. Эта проверка позволяет устранить многочисленные проблемы, связанные с нестабильностью вычисления веса фильтра - пробки, а также помогает предотвратить грубые ошибки при вычислениях расхода в течение промежутка краткой неустойчивости фильтров - пробок при их сходимости в случае изменений основной частоты вибрирующих расходных трубок.
Элемент вычисления вектора усиления 304, который показан более подробно на фиг. 5, получает градиент (ψ), вырабатываемый фильтром - пробкой 204 левого канала и поступающий по линии 260. Элемент 304 получает также по линии 350 сигнал SNR FAULT, вырабатываемый элементом обнаружения ошибки SNR 300. Кроме того, на элемент 304 по линии 356 поступает коэффициент забывания (λ), вырабатываемый элементом 306 вычисления параметра устранения смещения. Элемент вычисления вектора усиления 304 вычисляет обновленные значения вектора усиления (K) и выдает их по линии 352 для использования элементом 302 вычисления веса фильтра - пробки.
Элемент вычисления вектора усиления 304, который показан более подробно на фиг. 5, получает градиент (ψ) по линии 260, коэффициент забывания (λ) по линии 356 и сигнал SNR FAULT по линии 350 и вычисляет вектор усиления (K1, K2), который выдается по линии 352 для осуществления дальнейшей обработки. Показанные на фиг. 5 вычислительные элементы обычно производят манипуляции (преобразования) матрицы на их различных входах для получения на выходе вычисленного скалярного значения или вектора. Элемент вычисления вектора усиления 304 определяет вектор усиления K с использованием арифметики матрицы следующим образом:
K(t) = QT(t)/(λ(t)+ψ(t)TQ(t) - обновленный вектор усиления;
Q(t) = P(t)ψ(t) - вектор промежуточного вычисления;
P′(t) = P(t)-Q(t)K(t)/λ(t) - следующая матрица ковариантности.
На вычислительный элемент 500 по линии 260 поступает вектор градиента ψ и по линии 552 текущая матрица ковариантности (Р) от схемы задержки 514. Как можно видеть на фиг. 5, матрица ковариантности подается по трем линиям, несущим три сигнала. Это указывает на симметричную природу 2Х2 матрицы ковариантности. Два внедиагональных элемента 2Х2 матрицы ковариантности (Р) всегда равны. Поэтому при внедрении настоящего изобретения нужно отобразить только три значения (или в псевдо - контуре фиг. 5, или в преимущественной реализации программного обеспечения DSP). Вычислительный элемент 500 вырабатывает промежуточное произведение Q = Pψ и выдает вектор Q по линии 550. Вычислительный элемент 502 получает промежуточный вектор Q по линии 550, получает вектор градиента ψ по линии 260, получает коэффициент забывания λ по линии 356, а затем вычисляет вектор усиления K(K1K2) и выдает его по линии 352 для дальнейшего использования.
Вычислительный элемент 504 получает текущее значение текущей матрицы ковариантности P по линии 552, получает текущий вектор усиления K по линии 352, получает текущий вектор Q по линии 550, вычисляет новую матрицу ковариантности P′ = (P-QK)/λ, а затем выдает новую матрицу ковариантности P' по линии 554 для ее использования в виде P при обработке новой поступившей выборки. Мультиплексоры 508 и 512 используются для сброса вычислений, производимых элементом 504, при наличии сброса системы или когда обнаружено условие SNR FAULT. Мультиплексор 508 нормально передает новую матрицу ковариантности с его входной линии 554 на его выходную линию 558. Если по линии 350 поступает сигнал SNR FAULT, то мультиплексор 508 выбирает свою другую входную линию 556 и передает начальное значение матрицы (PSNR) на его выходную линию 558. Мультиплексор 512 нормально передает сигнал с его входной линии 558 на его выходную линию 562 в качестве входного сигнала регистра задержки 514. При поступлении системного сброса мультиплексор 512 выбирает свою другую входную линию 560 и передает начальное значение матрицы (PINT) на его выходную линию 562. Другими словами, при обнаружении наличия системного сброса или состояния SNR FAULT производится сброс вычислений матрицы ковариантности. В противном случае производится вычисление новой матрицы ковариантности (Р', для использования с новой полученной выборкой) как функции предыдущей матрицы ковариантности (Р), которая проходит с линии 554 через мультиплексоры 508 и 512 на линию 562. Схема задержки 514 задерживает ее появление на линии 552 до появления значения следующей выборки для обработки, что индицируется импульсом CLK, а затем выдает накопленное значение по линии 552 в качестве входного сигнала элемента 504 вычисления ковариантности.
На элемент вычисления параметра устранения смещения 306, который показан более подробно на фиг. 8, по линии 350 поступает сигнал SNR FAULT, который вырабатывается элементом 300 обнаружения ошибки SNR. Элемент вычисления параметра устранения смещения 306 вычисляет обновленные значения параметра устранения смещения (α) и выдает их по линии 258 для использования фильтром - пробкой 204. Элемент вычисления параметра устранения смещения 306 вычисляет также обновленный параметр устранения смещения (α′) для следующей выборки и выдает его по линии 354 для использования элементом 302 вычисления веса фильтра - пробки. Кроме того, элемент вычисления параметра устранения смещения 306 вычисляет обновленный коэффициент забывания (λ) и выдает его по линии 356 для использования элементом 304 вычисления вектора усиления.
Элемент вычисления параметра устранения смещения 306 определяет параметры устранения смещения и коэффициент забывания следующим образом:
α′(t) = α(t)αDECAY+αADDER - вычисление обновленного параметра устранения смещения;
λ(t) = λ′(t-1)λDECAY+λADDER - вычисление обновленного коэффициента забывания.
Каждый из регистров 800, 802, 804 и 806 содержит значения, которые используются при вычислении коэффициента забывания λ. На один из входов мультиплексора 2:1 818 по линии 356 подается предыдущее значение коэффициента забывания λ. Мультиплексор 818 нормально выбран для передачи этого значения на выходную линию 872 и на один из входов 2:1 мультиплексора 820. Мультиплексор 820 нормально выбран для передачи этого значения на выходную линию 874 и на один из входов регистра 826. Регистр 826 хранит это предыдущее значение коэффициента забывания λ до появления на его линии синхронизации сигнала CLK. Сигнал с выхода регистра 826 подается по линии 858 на вход умножающего соединения 828. На другой вход умножающего соединения 828 по линии 852 подается запомненное в регистре 802 значение λDECAY. Произведение λλDECAY с выхода умножающего соединения 828 по линии 860 подается на один из входов суммирующего соединения 830. На другой вход суммирующего соединения 830 по линии 850 подается запомненное в регистре 800 значение λADDER. Сумма с выхода суммирующего соединения 830 выдается по линии 356 в качестве обновленного коэффициента забывания λDECAY+λADDER.
При поступлении по линии 350 сигнала SNR FAULT, мультиплексор 818 выбирает свой вход по линии 854, на которую подается значение λSNR, запомненное в регистре 804. Это значение затем выдается на выходе мультиплексора 818 по линии 872 и заменяет предыдущий коэффициент забывания, который обычно используется при нормальном вычислении следующего значения. Это заранее заданное значение производит сброс вычисления коэффициента забывания λ по линии 356 при любом обнаружении состояния SNR FAULT, как это упоминалось ранее. Этот заранее заданный коэффициент забывания повторно начинает вычисления адаптивного фильтра - пробки, чтобы форсировать его сходимость на основной частоте вибрирующих расходных трубок.
Если на мультиплексор 820 подается системный RESET, то этот мультиплексор выбирает свой входной сигнал по линии 856, на которую поступает значение λINIT, хранящееся в регистре 806. Это значение затем поступает на выходную линию 874 мультиплексора 820 и заменяет предшествующий коэффициент забывания, используемый при нормальном вычислении следующего значения. Этот заранее заданный коэффициент забывания повторно начинает вычисления адаптивного фильтра - пробки, чтобы форсировать его сходимость на основной частоте вибрирующих расходных трубок.
Каждый из регистров 808, 810, 812 и 832 хранит значения, которые используются при вычислении параметра устранения смещения α. На один из входов мультиплексора 2: 1 834 по линии 354 подается предшествующее значение параметра устранения смещения α. Мультиплексор 834 нормально выбран для пропускания этого значения на выходную линию 878 и далее на вход мультиплексора 814. Мультиплексор 814, в свою очередь, нормально выбран для пропускания этого значения на выходную линию 868 и далее на вход регистра 816. Регистр 816 хранит это предшествующее значение параметра устранения смещения  до тех пор, пока на его шину синхронизации не поступит сигнал CLK. Значение с выхода регистра 816 подается по линии 258 на один из входов умножающего соединения 822 и на адаптивные фильтры - пробки 204 фиг. 3. Другой вход умножающего соединения 822 подключен к линии 864, на которую поступает значение αDECAY, хранящееся в регистре 810. На выходе умножающего соединения 822 получают произведение ααDECAY, которое по линии 866 подается на один из входов суммирующего соединения 824. Другой вход суммирующего соединения 824 подключен к линии 862, на которую поступает значение αADDER, хранящееся в регистре 808. На выходе суммирующего соединения 824 получают результирующую сумму, которая выдается по линии 354 в виде обновленного параметра устранения смещения α′ = ααDECAY+αADDER.
до тех пор, пока на его шину синхронизации не поступит сигнал CLK. Значение с выхода регистра 816 подается по линии 258 на один из входов умножающего соединения 822 и на адаптивные фильтры - пробки 204 фиг. 3. Другой вход умножающего соединения 822 подключен к линии 864, на которую поступает значение αDECAY, хранящееся в регистре 810. На выходе умножающего соединения 822 получают произведение ααDECAY, которое по линии 866 подается на один из входов суммирующего соединения 824. Другой вход суммирующего соединения 824 подключен к линии 862, на которую поступает значение αADDER, хранящееся в регистре 808. На выходе суммирующего соединения 824 получают результирующую сумму, которая выдается по линии 354 в виде обновленного параметра устранения смещения α′ = ααDECAY+αADDER.
При поступлении по линии 350 сигнала SNR FAULT, мультиплексор 834 выбирает свой вход по линии 876, на которую подается значение αSNR, запомненное в регистре 832. Это значение затем выдается на выходе мультиплексора 834 по линии 878 и заменяет предыдущий параметр устранения смещения, который обычно используется при нормальном вычислении следующего значения. Это заранее заданное значение производит сброс вычисления параметра устранения смещения α по линии 354 при любом обнаружении состояния SNR FAULT, как это упоминалось ранее. Этот заранее заданный параметр устранения смещения повторно начинает вычисления адаптивного фильтра - пробки, чтобы форсировать его сходимость на основной частоте вибрирующих расходных трубок.
Если на мультиплексор 814 подается системный RESET, то этот мультиплексор выбирает свой входной сигнал по линии 870, на которую поступает значение αINIT, хранящееся в регистре 812. Это значение затем поступает на выходную линию 868 мультиплексора 814 и заменяет предшествующий параметр устранения смещения, используемый при нормальном вычислении следующего значения. Этот заранее заданный параметр устранения смещения повторно начинает вычисления адаптивного фильтра - пробки, чтобы форсировать его сходимость на основной частоте вибрирующих расходных трубок.
ПЕРВЫЙ ПРИМЕР ОСУЩЕСТВЛЕНИЯ - ВЫЧИСЛЕНИЯ ЧАСТОТЫ
Элемент вычисления частоты 212 фиг. 3 показан состоящим из двух субэлементов, в именно, из элемента 308 вычисления весов фильтра Гертцеля и волновода 310 коэффициента половины окна.
Элемент 308 вычисления весов фильтра Гертцеля, который показан более подробно на фиг. 9, получает на входе по линии 258 веса фильтра - пробки, которые определены при работе элемента 210 весовой адаптации. Элемент 308 вычисления весов фильтра Гертцеля определяет затем веса (В') фильтра Гертцеля в виде комплексного числа, а также определяет частоту (Ω′) cинуcoидaльнoгo выходного сигнала расходной трубки, отображенного значениями сигнала дискретных выборок и содержащуюся в весах фильтра - пробки. Оба указанных значения вычислены на конце каждого периода половины окна, указанного сигналом половины окна, который поступает по линии 274 от ЗГ 214 фиг. 2. Полученные веса Гертцеля и частота выдаются по линии 358 для использования в волноводе 310 коэффициента половины окна.
На один из входов суммирующего соединения 900 по линии 258 поступает следующий вес W' фильтра - пробки, а на другой вход по линии 966 поступает выходной сигнал регистра 916. Полученная сумма по линии 950 подается на один из входов мультиплексора 2:1 904. На другой вход мультиплексора 904 по шине 258 подается следующий вес (W'). Мультиплексор 904 нормально выбран для пропускания суммы на шине 950 на его выходную шину 954. Мультиплексор 2:1 912 нормально выбран для пропускания значения на его входной шине 954 на выходную шину 962. Значение с выходной шины 962 подается на один из входов регистра 916, загрузка которого производится при каждом синхроимпульсе CLK. Текущее значение, хранящееся в регистре 916, представляет собой сумму весов (W'1), как это указывалось ранее. В начале периода новой половины окна сигнал к половине окна подается по линии 274 от ЗГ 214 фиг. 2. В начале периода новой половины окна мультиплексор 904 изменяется на один период для выбора его другого входа по линии 258, чтобы повторно начать новое накопление принятых весов. В течение промежутка включения питания на мультиплексор 912 подается сигнал RESET системы, что приводит к выбору его входа по линии 958, на которую поступает нулевое (0) начальное значение веса. Это приводит к запуску нового накопления весов, полученных по линии 258.
На один из входов суммирующего соединения 902 по линии 258 поступают веса W'2 фильтра - пробки, а другой вход по линии 968 подключен к выходу регистра 918. Полученная сумма по линии 952 подается на вход 2:1 мультиплексора 906. На другой вход мультиплексора 906 по линии 258 подается следующий вес (W'2). Мультиплексор 906 нормально выбран для передачи суммы с входной линии 952 на выходную линию 956. 2:1 мультиплексор 914 нормально выбран для передачи значения с входной линии 956 на выходную линию 964. Значение с линии 964 подается на вход регистра 918, который загружается при каждом синхроимпульсе CLK. Текущее значение, которое хранится в регистре 918, представляет собой накопленную сумму весов (W'2), как это упоминалось ранее. В начале периода новой половины окна сигнал к половине окна подается по линии 274 от ЗГ 214 фиг. 2. При начале периода половины окна мультиплексор 906 изменяется на один период и выбирает другой вход по линии 258 для возобновления нового накопления полученных весов. В течение промежутка включения питания на мультиплексор 914 подается сигнал RESET системы, что приводит к выбору его входа по линии 960, на которую поступает начальное значение веса минус единица (-1). Это приводит к запуску нового накопления весов, полученных по линии 258.
Сумма весов (W'1), принятых по линии 258, по линии 966 подается на вход X вычислительного элемента 920. Сумма весов (W'2), принятых по линии 258, по линии 968 подается на вход Y вычислительного элемента 920. Вычислительный элемент 920 вычисляет действительную часть весов фильтра Гертцеля (В'0) как:
В'0= X/(2sqrt(-YN)),
где X и Y являются входами элемента 920, как указывалось ранее, a N представляет собой число выборок в течение периода половины окна. Более конкретно, действительная часть веса фильтра равна:
В'0=avg(W'1)/(2sqrt(-avg(W'2))),
где avg (х) представляет собой усредненное значение x в течение предшествующего периода половины окна выборок. Действительная часть весов фильтра Гертцеля (В'0), которая получена вычислением в вычислительном элементе 920, подается по линии 358 для использования волноводом 310 коэффициента половины окна, который обсуждается ниже. Действительная часть весов фильтра Гертцеля (В'0) также подается на вход X вычислительного элемента 922, который вычисляет мнимую часть весов фильтра Гертцеля (В'1) как:
В'1=sqrt(1-Х2),
в котором X представляет собой действительную часть веса фильтра, вычисленную ранее. Мнимая часть весов фильтра Гертцеля (В'1), которая вычислена вычислительным элементом 922, подается по линии 358 для использования волноводом 310 коэффициента половины окна, который обсуждается ниже. Кроме того, действительная часть весов фильтра Гертцеля также подается на вход X вычислительного элемента 924, который вычисляет основную частоту (Ω′) вибрирующих расходных трубок в виде:
Ω′ = cos-1X,
где X представляет собой действительную часть весов фильтра, вычисленную ранее. Основная частота (Ω′), которая вычислена вычислительным элементом 924, подается по линии 358 для использования волноводом 310 коэффициента половины окна, который обсуждается ниже.
Следует иметь в виду, что вычисления, которые осуществлены вычислительными элементами 920, 922 и 924, являются неопределенными, когда их соответствующие входы находятся вне определенных заданных диапазонов. Выходные значения, полученные при этих вычислениях, используются только на границах окна Ханнинга, причем в это время входные сигналы должны отвечать соответствующим вычислениям. По этой причине неопределенные вычисления, показанные на блок-схеме фиг. 9, представляют малый практический интерес. Вычисления могут быть не действенными на границах половины окна при определенных ошибочных состояниях фильтров - пробок. Однако такие ошибки фильтров могут быть обнаружены и скорректированы в течение нескольких периодов половины окна, как это упоминалось ранее. В практическом плане влияние этих ошибок вычислений весов фильтра Гертцеля может быть игнорировано. При производственном использовании настоящего изобретения такое условие может быть обнаружено и отмечено в виде временно не используемых значений при измерении расхода. Как это упоминалось ранее, псевдо - контуры фиг. 9 предназначаются для использования только как вспомогательное средство для понимания способов и связанных с ними вычислений в соответствии с настоящим изобретением.
Волновод 310 коэффициента половины окна, показанный более подробно на фиг. 10, получает веса фильтра Гертцеля (В'=В'0, В'1) и частоту (Ω′), которые вычислены ранее вычислительным элементом весов фильтра Гертцеля 308. Значения, полученные при работе элемента 308, соответствуют выборкам периода половины окна, которые были использованы для вычисления весов и частоты. Волновод 310 коэффициента половины окна затем синхронизирует вычисленные значения (В' и Ω′) и объединяет их с одним из двух параллельных вычислений фазы для получения наложений половин окон. Фильтры Гертцеля используются для вычисления стробированного DTFT для выборок каждого периода половины окна. Однако при вычислении стробированного DTFT требуется, чтобы суммирование выбранных значений производилось для полного окна. Как это упоминается в данном описании, два фильтра Гертцеля поэтому производят вычисления в параллель. Первый фильтр осуществляет необходимые вычисления для первой половины окна. По завершении первой половины окна должно начинаться вычисление нового фильтра, а состояние первой половины окна переносится во второй фильтр, который затем завершает вычисление фильтрации для второй половины окна. Указанным образом полное вычисление окна может быть завершено у границы каждой половины окна. Волновод 310 коэффициента половины окна совмещает вычисления весов фильтра полного окна с объединенным участком вычислений пропущенной через волновод половины окна, так что накопление данных для первой половины окна и для второй половины окна производится при использовании одних и тех же весов фильтра полного окна.
Схемы задержки 1000, 1002, 1004, 1010, 1012 и 1014 подают соответствующие входные значения на их соответствующие выходы с задержкой на один синхроимпульс ЗГ. Каждая из схем задержки 1000, 1002, 1004, 1010, 1012 и 1014, а также мультиплексоры 1006, 1008, 1016 и 1018 получают на их соответствующий вход синхроимпульсы или производят выборку сигналов с выхода схемы "И" 1020 (обозначенного "X"). На один из входов схемы "И" 1020 подается синхроимпульс CLK, а на другой вход по линии 274 поступает сигнал половины окна. При начале каждого периода половины окна производится загрузка соответствующих регистров входными величинами, подаваемыми на их соответствующие входные шины. Эта загрузка синхронизирована с импульсом CLK в начале периода половины окна. Вес фильтра Гертцеля В'1 подается по линии 358 на вход схемы задержки 1000 и на один из входов (нормально не выбранный) мультиплексора 1006. Вес фильтра Гертцеля В'0 с однократной задержкой по линии 1050 подается на другой вход (нормально выбранный) мультиплексора 1006, а также на вход схемы задержки 1010 и на один из входов (нормально не выбранный) мультиплексора 1016. Вес фильтра Гертцеля В'0 с однократной задержкой через мультиплексор 1006 выдается по линии 268 в качестве веса фильтра Гертцеля В01 для дальнейшей обработки элементами 206 вычисления фазы, что соответствует вычислениям фазы первой из двух параллельных половин окна, что обсуждается далее более подробно со ссылкой на фиг. 11. Вес фильтра Гертцеля В'0 с двухкратной задержкой подается по линии 1056 на другой вход (нормально выбранный) мультиплексора 1016. Вес фильтра Гертцеля В'0 с двухкратной задержкой через мультиплексор 1016 выдается по линии 268 в качестве веса фильтра Гертцеля B02 для дальнейшей обработки элементами 206 вычисления фазы, что соответствует вычислениям фазы второй из двух параллельных половин окна, что обсуждается далее более подробно со ссылкой на фиг. 11. При появлении сигнала половины окна (обозначенного "A" на фиг. 10) на линии 274 производится выборка мультиплексора 1006, который передает сигнал с его входной линии 358 на выходную линию 268 для дальнейшей обработки в качестве веса фильтра Гертцеля В01, причем этот сигнал представляет собой копию без задержки входного значения В'0 с входной линии 358. Аналогично, при появлении сигнала половины окна (обозначенного "A" на фиг. 10) на линии 274 производится выборка мультиплексора 1016, который передает сигнал с его входной линии 1050 на выходную линию 268 для дальнейшей обработки в качестве веса фильтра Гертцеля В02, причем этот сигнал представляет собой копию с однократной задержкой входного значения В'0 с входной линии 358.
Вес фильтра Гертцеля В'1 подается по линии 358 на вход схемы задержки 1002 и на один из входов (нормально не выбранный) мультиплексора 1008. Вес фильтра Гертцеля В'1 с однократной задержкой по линии 1052 подается на другой вход (нормально выбранный) мультиплексора 1008, а также на вход схемы задержки 1012 и на один из входов (нормально не выбранный) мультиплексора 1018. Вес фильтра Гертцеля В'1 с однократной задержкой через мультиплексор 1008 выдается по линии 268 в качестве веса фильтра Гертцеля В11 для дальнейшей обработки элементами 206 вычисления фазы, что соответствует вычислениям фазы первой из двух параллельных половин окна, что обсуждается далее более подробно со ссылкой на фиг. 11. Вес фильтра Гертцеля В'1 с двухкратной задержкой по линии 1058 подается на другой вход (нормально не выбранный) мультиплексора 1018. Вес фильтра Гертцеля В'1 с двухкратной задержкой через мультиплексор 1018 выдается по линии 268 в качестве веса фильтра Гертцеля В12 для дальнейшей обработки элементами 206 вычисления фазы, что соответствует вычислениям фазы второй из двух параллельных половин окна, что обсуждается далее более подробно со ссылкой на фиг. 11. При появлении сигнала половины окна (обозначенного "A" на фиг. 10) на линии 274 производится выборка мультиплексора 1008, который передает сигнал с его входной линии 358 на выходную линию 268 для дальнейшей обработки в качестве веса фильтра Гертцеля В11, причем этот сигнал представляет собой копию без задержки входного значения В'1 с входной линии 358. Аналогично, при появлении сигнала половины окна (обозначенного "A" на фиг. 10) на линии 274 производится выборка мультиплексора 1018, который передает сигнал с его входной линии 1052 на выходную линию 268 для дальнейшей обработки в качестве веса фильтра Гертцеля В12, причем этот сигнал представляет собой копию с однократной задержкой входного значения В'1 с входной линии 358.
Основная частота Ω′ подается по линии 358 на вход схемы задержки 1004. Частота Ω′ с однократной задержкой по линии 1054 подается на вход схемы задержки 1014. Частота Ω′ с двухкратной задержкой с выхода схемы задержки 1014 выдается по линии 268 для дальнейшей обработки элементом 208 вычисления Δt.
ПЕРВЫЙ ПРИМЕР ПРИМЕНЕНИЯ - ВЫЧИСЛЕНИЯ ФАЗЫ
Элементы вычисления фазы 206, показанные более подробно на фиг. 11, обрабатывают отфильтрованные дискретные значения выборок для получения комплексного числа, отображающего фазу выборок отфильтрованного выходного сигнала датчика. Комплексное число выдается по линии 266 (и по линии 264 элементом вычисления фазы 206 для левого канала) для использования в последующих вычислениях Δt. В частности, Фурье - преобразование фильтра Гертцеля применяется для каждого окна Ханнинга значений отфильтрованного, дискретного выходного сигнала датчика, как для левого, так и для правого каналов. Коэффициенты фильтра Гертцеля, которые определены элементом 212 вычисления частоты, по линии 268 подаются на элементы 206 вычисления фазы. Комплексное число с выхода элемента 206 вычисления фазы выдается по линии 266 (и по линии 264 элементом вычисления фазы 206 для левого канала) для использования в последующих вычислениях Δt.
Для более эффективного использования имеющихся данных выборок два вычисления осуществляются в параллель, причем первое вычисление производится для каждого окна данных выборок, а второе - для каждого окна данных выборок, которое начинается с задержкой на половину длины окна относительно первого параллельного вычисления. У границы периода каждой половины окна частичная сумма Фурье для первой половины окна переносится из первого элемента параллельного вычисления для инициализации второго параллельного вычисления. Одновременно, данные завершенного вычисления из второго элемента параллельного вычисления, которые представляют собой значение комплексной фазы для предшествующего периода полного окна выборок, выдаются для последующих вычислений Δt.
На элементы 1100 и 1102 по линии 272 поступает текущее число выборок в пределах текущей половины окна (SAMPNO), а сигнал с их выходов (1150 и 1152 соответственно) представляет собой соответствующее предварительно вычисленное значение веса. Значение веса отыскивается из вектора (WINDOW), указанного значением показателя SAMPNO. Элемент 1102 добавляет значение N (половину длины окна Ханнинга) к принятому по линии 272 значению SAMPNO при индексации вектора WINDOW, для смещения весовых значений на число выборок, соответствующих половине размера окна Ханнинга. Значения веса по линиям 1150 и 1152 подаются на один из входов соответствующих умножающих соединений 1104 и 1106. На другие входы умножающих соединений 1104 и 1106 подается по линии 260 (или по линии 262 для правого канала) следующее усиленное значение (e) выборки. Произведения (значения взвешенных усиленных выборок окна Ханнинга) с выхода умножающих соединений 1104 и 1106 поступают по соответствующим линиям 1154 и 1156 на входы соответствующих вычислительных элементов 1108 и 1110.
В каждом из вычислительных элементов 1108 и 1110 к взвешенным выборкам прикладываются коэффициенты фильтра Гертцеля для образования комплексного числа, отображающего фазу значений выборок сигнала. Обработка взвешенных выборок производится при поступлении каждого синхроимпульса CLK, в течение длительности одной половины окна выборок. На вычислительный элемент 1108 по линии 1154 поступает взвешенное значение выборки (wsamp), по линии 268 подаются коэффициенты фильтра Гертцеля для первой половины окна (В01, В11), а по линии 1158 поступает предыдущее состояние фильтра; элемент 1108 производит вычисление нового состояния фильтра как комплексной суммы Y'=wsamp+BY. Новое состояние выдается по выходной линии 1162 при поступлении следующего синхроимпульса, подаваемого по линии CLK. На вычислительный элемент 1110 по линии 1156 поступает взвешенное значение выборки (wsamp), по линии 268 подаются коэффициенты фильтра Гертцеля для второй половины окна (В02, В12), а по линии 1160 поступает предыдущее состояние фильтра; элемент 1110 производит вычисление нового состояния фильтра как комплексной суммы Y'=wsamp+BY. Новое состояние фильтра выдается по выходной линии 264 как RL, QL для левого канала и как RR, QR по выходной линии 266 для правого канала. При поступлении каждого импульса CLK, указывающего на наличие новой выборки для обработки, в каждом из вычислительных элементов 1108 и 1110 осуществляются соответствующие вычисления. Вновь вычисленное выходное значение (Y') элементов 1108 и 1110 появляется на их выходных линиях 1162 и 264 (266 для правого канала) при поступлении импульса CLK для следующего периода выборок. Синхронизированные выходные значения по линиям 1162 и 264 подаются соответственно на нормально выбранные нулевые входы мультиплексоров 1112 и 1114. Мультиплексоры 1112 и 1114 передают их соответствующие нормально выбранные входные значения на их соответствующие выходы 1158 и 1160, а в результате, на входы Y элементов 1108 и 1110, для использования при следующем вычислении коэффициентов фильтра Гертцеля.
При поступлении по линии 274 импульсного сигнала половины окна производится повторный запуск элементов 1108 и 1110 для осуществления фильтрации Гертцеля в течение периода следующей половины окна. Нормально мультиплексор 1112 выбран для передачи комплексного значения с входной линии 1162 на его выходную линию 1158 в качестве текущего состояния вычислительного элемента 1108 для настоящего периода половины окна. В начале периода половины окна (в конце предыдущего периода половины окна) поступающий по линии 274 сигнал половины окна выбирает мультиплексор 1112 для приложения его нулевого значения по входной линии 1164 на выходную линию 1158. Это приводит к сбросу фильтра в первом вычислительном элементе 1108, что позволяет начать новый период половины окна. Нормально мультиплексор 1114 выбран для передачи комплексного значения с входной линии 264 (266 для правого канала) на его выходную линию 1160 в качестве состояния вычислительного элемента 1110 для текущего периода половины окна. В начале периода половины окна поступающий по линии 274 сигнал половины окна выбирает мультиплексор 1114 для приложения состояния от периода предыдущей половины окна, полученного с выхода элемента 1108, с его входной линии 1162 на выходную линию 1160. Это позволяет вычислительному элементу 1110 начать новый период половины окна с частичным результатом Гертцеля, вычисленным для предшествующей половины окна в результате работы элемента 1108. Другими словами, вычислительный элемент 1108 обрабатывает первую половину каждого полного окна выборок, в то время как элемент 1110 обрабатывает вторую половину и комбинирует ее с первой половиной для получения комплексного числа, несущего информацию о фазе для каждого периода половины окна для предыдущей длины выборок полного окна. На границе каждой половины окна осуществляется полное вычисление фазы, данные которого получают на выходе элемента 1110 на шине 264 (266 для правого канала), что отображает фазу предшествующего периода полного окна выборок. Как упоминалось ранее, на границе каждой половины окна волновод 310 коэффициента половины окна сдвигает коэффициенты фильтра Гертцеля для элемента 1108 параллельного вычисления первой половины окна (В01, В11) на коэффициенты, которые были использованы элементом 1110 параллельного вычисления второй половины окна (В02, В12). Это гарантирует приложение одних и тех же весов Гертцеля как к параллельному частичному вычислению первой половины окна, так и к параллельному частичному вычислению второй половины окна.
ПЕРВЫЙ ПРИМЕР ПРИМЕНЕНИЯ - ВЫЧИСЛЕНИЯ Δt
Элемент 208 вычисления Δt, который показан более подробно на фиг. 12, получает фазовую информацию для левого и правого каналов, которая определена при работе элементов вычисления фазы 206 и поступает по линии 264 для левого канала и по линии 266 для правого канала. Частотная информация, которая определена при работе элемента вычисления частоты 212, поступает на элемент 208 вычисления Δt по линии 268. Элемент 208 вычисления Δt производит определение временной задержки (сдвига) между двумя выборками синусоидальных сигналов, которая получена в результате фазового сдвига между выходными сигналами датчиков левой и правой расходных трубок. Значение Δt ориентировочно пропорционально массовому расходу материала, протекающего через расходные трубки расходомера Кориолиса. Другие факторы, известные сами по себе, используются при корректировке вычисленного массового расхода для устранения температурных изменений и других факторов.
Данные Фурье - преобразования для левого канала умножаются на сопряженные данные Фурье - преобразования для правого канала. Затем вычисляют угол полученного комплексного результата. Эта разность фаз, поделенная на частоту вибрирующих расходных трубок, дает значение Δt.
Действительная и мнимая части фазового значения для левого канала (соответственно RL, QL) поступают по линии 264 от элемента 206 вычисления фазы левого канала. Действительная и мнимая части фазового значения для правого канала (соответственно RR, QR) поступают по линии 266 от элемента 206 вычисления фазы правого канала. На входы умножающего соединения 1200 по линии 264 поступает RL, а по линии 266 - RR; на выходной линии 1250 получают произведение RL RR. На входы умножающего соединения 1202 по линии 264 поступает QL, а по линии 266 - QR; на выходной линии 1252 получают произведение QL QR. На входы умножающего соединения 1204 по линии 264 поступает QL, а по линии 266 - RR; на выходной линии 1254 получают произведение QL RR. На входы умножающего соединения 1206 по линии 264 поступает RL, а по линии 266 - QR; на выходной линии 1256 получают произведение RLQR.
На входы суммирующего соединения 1208 по линии 1250 поступает произведение RL RR, а по линии 1252 - произведение QLQR; на выходной линии 1268 получают сумму RL RR + QL QR, которая подается на вход X вычислительного элемента 1212. На входы суммирующего соединения 1210 по линии 1254 поступает произведение QL RR, а по линии 1256 - произведение RL QR; на выходной линии 1270 получают сумму QLRR + RLQR, которая подается на вход Y.
На вход X вычислительного элемента 1212 подается сигнал по линии 1268, а на вход Y подается сигнал по линии 1270. Элемент 1212 производит определение угла фазового сдвига между синусоидальным сигналом датчика расходной трубки левого канала и синусоидальным сигналом датчика расходной трубки правого канала, из аргумента (фазы) комплексного числа, представленного на его входах X и Y как (X + iY) (то есть ARG (X + iY)). Вычисленный элементом 1212 угол фазового сдвига подается по линии 1258 на вход X вычислительного элемента 1214. На вход Y вычислительного элемента 1214 подается по линии 268 частота (Ω), полученная на выходе элемента 212 вычисления частоты фиг. 3. Затем вычислительный элемент 1214 производит вычисление отношения X/Y (разность фаз/частота) и выдает полученное отношение по выходной линии 1260. На входы умножающего соединения 1218 по линии 1260 поступает вычисленное отношение, а по линии 1262 значение N, запомненное в регистре 1216, которое отображает фиксированный период выборки (инверсный относительно частоты выборки).
На выходной линии 1264 умножающего соединения 1218 получают произведение двух входных значений, а именно, значение Δt, которое подается на вход регистра 1222. Регистр 1222 производит загрузку текущего значения на его входе при поступлении синхроимпульса по линии 1266. На входы логической схемы 1220 поступает частота CLK и сигнал половины окна, несущий информацию о начале периода выборки новой половины окна. На выходе схемы "И" 1220 получают импульсный сигнал половины окна, синхронизированный с частотой синхроимпульсов CLK, которая вырабатывается ЗГ 214 фиг. 2. Запомненное в регистре 1222 значение Δt, которое несет информацию о массовом расходе материала через расходомер, подается по линии 294 для использования элементом 290 вычисления массового расхода. Как хорошо известно специалистам, значение Δt только ориентировочно пропорционально массовому расходу в расходных трубках. Элемент 290 вычисления массового расхода корректирует значение Δt и выдает откорректированный массовый расход по линии 155 фиг. 2 для использования 292. Элемент 290 производит соответствующие корректировки и масштабирование для компенсации воздействия температуры и других факторов внешней среды.
В описанном примере осуществления настоящего изобретения использован ряд постоянных величин для сброса вычислений, связанных с фильтром - пробкой. В условиях существования ошибки производится сброс параметра устранения смещения (α), коэффициента забывания (λ) и матрицы ковариантности (Р), для возобновления вычислительной обработки с целью адаптации параметров фильтра - пробки к изменениям его основной частоты. Регулировка и инициализация параметра эти значения могут быть адаптированы к любым частным применениям расходной трубки и к любым параметрам окружающей среды. Полезные значения для этих постоянных могут быть вычислены как функция ожидаемой номинальной основной частоты (freq) вибрирующих расходных трубок в следующем виде:
αINIT = 0,90freq/100,
αLIMIT = 0,98freq/100,
αDECAY = 0,999freq/100,
αSNR = 0,95freq/100
λINIT = 0,95freq/100,
λLIMIT = 0,995freq/100,
λDECAY = 0,99freq/100,
λSNR = 0,97freq/100
Матрица ковариантности (P) инициализируется при различных обсуждавшихся ранее условиях в следующем виде:
где  матрица идентичности.
матрица идентичности.
ВТОРОЙ ПРИМЕР ОСУЩЕСТВЛЕНИЯ (ПРЕИМУЩЕСТВЕННЫЙ ВАРИАНТ)
Преимущественный вариант осуществления настоящего изобретения описан со ссылкой на фиг. 13-15 как второй пример осуществления способов в соответствии с настоящим изобретением. Как и в первом примере, адаптивный фильтр - пробка использован для усиления сигнала, представленного прореженными значениями выборок левого и правого каналов, поступающими по соответствующим линиям 254 и 256. В этом втором примере использованы четыре фильтра - пробки, по два последовательно в каждом левом и правом каналах. Два фильтра в каждом из каналов "каскадированы" так, что первый фильтр представляет собой Q - фильтр с широкой полосой задерживания (пробки) и обеспечивает ограниченное усиление сигнала, но обладает возможностью быстрого отслеживания (сходимости) при изменениях основной частоты вибрирующих расходных трубок. Выходной сигнал с первого каскадированного фильтра поступает затем на второй каскадированный фильтр - пробку. Второй фильтр представляет собой Q - фильтр с узкой полосой задерживания (пробки) и обеспечивает высокое подавление шума и гармоник по сравнению с известными ранее решениями или по сравнению с первым описанным ранее решением. Несмотря на наличие узкой полосы задерживания второй фильтр - пробка все еще обладает возможностью быстрой адаптации к изменениям основной частоты вибрирующих расходных трубок, по причине ограниченного усиления (фильтрации) первого фильтра - пробки. Ограниченные уровни шума и гармоник в сигнале, который поступает на второй фильтр - пробку, также позволяют ему быстро сходиться при изменениях основной частоты вибрирующих расходных трубок.
Дополнительный фильтр - пробка, который имеет полосу пробки (полосу задерживания) еще более широкую, чем у первого из каскадированных фильтров, используется для получения оценки основной частоты вибрирующих расходных трубок. Эта оценка используется при вычислениях весовой адаптации для уставки параметра частоты первого каскадированного фильтра -пробки, как в левом, так и в правом каналах. Выходной сигнал со вторых каскадированных фильтров - пробок используется при вычислениях весовой адаптации для регулировки параметра частоты вторых каскадированных фильтров - пробок.
В первом примере осуществления настоящего изобретения сделана попытка сбалансировать ширину полосы задерживания фильтра - пробки, чтобы получить узкую полосу задерживания (высокое значение Q) для лучшего усиления сигнала, однако при быстрой сходимости в случае изменений основной частоты вибрирующих расходных трубок, за счет использования фильтра - пробки с широкой полосой задерживания (низкое значение Q). Для того чтобы совместить эти два требования, производится изменение параметра устранения смещения (α) в каждом периоде выборок и осуществляется регулировка ширины полосы задерживания фильтра - пробки для каждого следующего значения квантованного сигнала. Во втором примере осуществления настоящего изобретения использовано множество фильтров - пробок с фиксированной формой полосы задерживания (с фиксированными значениями Q), что позволяет получить оптимальное значение как для требования быстрого отслеживания изменений частоты, так и для требования лучшего подавления шума. Второе решение обеспечивает лучшую точность и воспроизводимость результатов по сравнению с первым решением по трем причинам. Прежде всего, второй каскадированный фильтр - пробка остается всегда в состоянии с фиксированной узкой полосой задерживания (высокое значение Q) для лучшего подавления шумов и гармоник. Улучшенное подавление шумов само по себе обеспечивает повышенную точность по сравнению с другими решениями. Во - вторых, лучшее отслеживание каскадированными фильтрами- пробками изменений основной частоты вибрирующих расходных трубок улучшает воспроизводимость усилений значений квантованного сигнала. И наконец, каскадированные фильтры - пробки обеспечивают более точную оценку частоты расходной трубки для последующих вычислений Δt элементе 208.
Эти три улучшения получены за счет возрастания вычислительной сложности. Индивидуальные вычислительные элементы второго решения в некоторой степени проще, чем элементы для первого решения (скалярные арифметические действия и матрицы). Однако во втором решении возрастает общая вычислительная сложность за счет применения пяти фильтров - пробок и двух вычислений весовой адаптации для каждой выборки. Несмотря на некоторую большую вычислительную сложность, данное второе решение находится в рамках вычислительной мощности имеющихся в продаже цифровых сигнальных процессоров.
ОБЩЕЕ РАССМОТРЕНИЕ ВТОРОГО ПРИМЕРА ОСУЩЕСТВЛЕНИЯ
На фиг. 13 изображены в развернутом виде элементы фиг. 2, чтобы показать дополнительные подробности, относящиеся к потоку информации между вычислительными элементами фиг. 2. Вычислительными элементами 1300 являются первые каскадированные адаптивные фильтры - пробки. На первый каскадированный адаптивный фильтр - пробку левого канала 1300 по линии 254 (фиг. 2) поступают выборки прореженного выходного сигнала датчика. Весовой коэффициент (θ(t)) функции передачи фильтра - пробки поступает по линии 1360 от элемента 1302 весовой адаптации. Параметр устранения смещения (α′), который определяет форму полосы задерживания (пробки), поступает от регистра 1306 по линии 1364 (которая также имеет обозначение "E"). На первый каскадированный адаптивный фильтр-пробку правого канала 1300 по линии 256 (фиг. 2) поступают выборки прореженного выходного сигнала датчика; этот фильтр работает аналогично каскадированному адаптивному фильтру - пробке 1300 левого канала. На каскадированные адаптивные фильтры - пробки как левого, так и правого каналов по линии 1360 поступает один и тот же параметр адаптации (θ(t)) от элемента 1302 весовой адаптации, а также по линии 1364 один и тот же параметр устранения смещения (α′) от регистра 1306.
На дополнительный адаптивный фильтр - пробку 1308 поступают выборки прореженного выходного сигнала левого канала по линии 254. На этот фильтр - пробку от регистра 1306 по линии 1364 поступает параметр устранения смещения (α0). Этот параметр устранения смещения (α0) задает широкую полосу задерживания (низкий Q), что позволяет этому фильтру - пробке быстро отслеживать изменения основной частоты вибрирующих расходных трубок. Усиление выходного сигнала в этом фильтре - пробке не используется (фильтр обеспечивает очень малое эффективное усиление по причине его широкой полосы задерживания). Вместо этого на выходе фильтра получают коэффициент ошибки (n) и градиент (Ψ), которые по линии 1358 передаются на элемент весовой адаптации 1302 для вычисления весовых параметров (θ(t-1) и θ(t)). Вновь вычисленные весовые параметры θ(t-1) и θ(t) по линии 1360 подаются от элемента весовой адаптации 1302 на фильтры - пробки 1300 и 1308 при подготовке приема нового прореженного квантованного сигнала.
Усиленные значения сигнала для каждой из входных прореженных выборок после обработки фильтрами - пробками 1300 левого и правого каналов по линиям 1350 и 1352 поступают как yL и yR на соответствующие вторые каскадированные фильтры - пробки 1310. На вторые каскадированные фильтры - пробки 1310 по линии 1362 подаются от элемента весовой адаптации 1312 одинаковые весовые параметры θ(t-1) и θ(t). От регистра 1306 по линии 1364 (которая также обозначена "E") поступает параметр устранения смещения (α2), который определяет ширину полосы задерживания. На выходе второго каскадированного фильтра - пробки 1310 левого канала получают коэффициент ошибки (n) и градиент (Ψ), которые по линии 260 передаются на элемент весовой адаптации 1312 для вычисления весовых параметров (θ(t-1) и θ(t)). Вновь вычисленные весовые параметры (θ(t-1) и θ(t)) по линии 1362 подаются от элемента весовой адаптации 1312 на фильтры - пробки 1310 при подготовке приема нового прореженного квантованного сигнала, усиленного первыми каскадированными фильтрами - пробками 1300.
Вторые каскадированные адаптивные фильтры - пробки 1310 как левого, так и правого каналов вырабатывают усиленный сигнал, который представлен значениями дискретных выборок на их соответствующих выходных линиях 260 и 262. Усиленный сигнал, который обозначен eL и eR соответственно для левого и правого каналов, отображает объединенные выборки входного сигнала, с отфильтрованными шумами, но для узкой полосы частот вблизи от основной частоты вибрирующих расходных трубок.
Все упомянутые фильтры - пробки фиг. 13 (1300, 1308 и 1310) производят вычисление одних и тех же функций для получения одинаковых выходных значений, а именно: усиленного значения сигнала (y или e), коэффициента ошибки (n) и градиента (Ψ). Однако значения шума (коэффициента ошибки) и градиента от второго каскадированного адаптивного фильтра - пробки 1300 правого канала, а также от обоих первых каскадированных адаптивных фильтров - пробок, не используются в соответствии со способами и устройствами по настоящему изобретению. Аналогично, выходное значение усиленного сигнала адаптивного фильтра - пробки 1308 отслеживания частоты не используются в соответствии со способами по настоящему изобретению. Функции, вычисление которых осуществляется всеми адаптивными фильтрами - пробками 1300, 1308 и 1310, обсуждаются далее более подробно. Коэффициент ошибки представляет собой главным образом шумовую компоненту значений выборок. Специалистам в данной области известно, что когда применяют рекурсивный алгоритм least - squares (наименьших квадратов), как и здесь, то постериорная ошибка предсказания улучшает скорость сходимости фильтра (см. Arye Nehoral "Адаптивный фильтр - пробка минимального параметра с ограниченными полюсами и нулями", IEEE Transactions on Acoustics, Speech and Signal Processing, Vol. ASSP -33, N 4, август 1985 г., стр. 987).
Значения усиленного сигнала от вторых каскадированных адаптивных фильтров - пробок 1310 (eL и eR) левого и правого каналов подаются по соответствующим линиям 260 и 262 на элементы 206 вычисления фазы. Элементы 206 вычисления фазы и элемент 208 вычисления Δt индентичны элементам, которые обсуждались выше со ссылкой на первый пример, показанный на фиг. 3-12.
На элемент вычисления частоты 1304 по линии 1362 поступает вес фильтра θ(t) от элемента 1312 весовой адаптации; этот элемент 1304 производит вычисление весов (В') для осуществления вычислений коэффициентов фильтра Гертцеля элементами 206 вычисления фазы и вычисляет частоту Ω′ вибрирующих расходных трубок. Эти выходные значения поступают на мультиплексор половины окна волновода 310 коэффициента половины окна по линии 358. Волновод 310 коэффициента половины окна обсуждался ранее со ссылкой на первый пример, показанный на фиг. 3-12.
ВТОРОЙ ПРИМЕР ОСУЩЕСТВЛЕНИЯ - ФИЛЬТРЫ - ПРОБКИ
На фиг. 15 показаны дополнительные детали построения адаптивных фильтров - пробок 1300, 1308 и 1310 второго варианта осуществления настоящего изобретения. Как это упоминалось ранее, некоторые выходные значения и связанные с ними входные значения не используются в некоторых, аналогичных в другом отношении адаптивных фильтрах - пробках второго варианта осуществления настоящего изобретения. При описании фиг. 14 обсуждается работа показанных фильтров - пробок так, как будто все их входы и выходы используются (как это имеет место во втором каскадированном адаптивном фильтре - пробке левого канала 1310). Для упрощения далее дается детальное описание фильтра - пробки левого канала 1310, которое отображает работу всех пяти адаптивных фильтров - пробок (1300, 1308 и 1310) второго варианта осуществления настоящего изобретения. На вход фильтра левого канала 1310 входной сигнал подается по линии 1350, а по линии 260 выходной сигнал выдается. На вход фильтра 1300 левого канала и фильтра 1308 входной сигнал подается по линии 254, на вход фильтра 1300 правого канала входной сигнал подается по линии 256, а на вход фильтра 1310 правого канала входной сигнал подается по линии 1352. Выходные сигналы других фильтров - пробок выдаются по линиям 1350 (фильтр 1300 левого канала), 1352 (фильтр 1300 правого канала), 1358 (фильтр 1308) и 262 (фильтр 1310 правого канала). Специалисты легко поймут, что вычислительные элементы всех пяти фильтров - пробок работают аналогично.
Адаптивный фильтр - пробка 1310 левого канала фиг. 14 определяет наличие шума в значениях u (t) (где (t) используется в приведенных далее выражениях для указания значения, соответствующего периоду выборки "t") входных дискретных выборок, которые поступают по входной линии 1350. Параметр устранения смещения (обозначенный как α в приведенных далее выражениях) поступает по линии 1364 (как α2/ ). Коэффициенты фильтра - пробки для текущего периода выборки θ(t) и для предыдущего периода выборки (θ(t-1)) поступают по линии 1362. Вычитание значений шумового сигнала е из значений входной выборки u дает отфильтрованное усиленное значение е на выходной линии 260. Адаптивный фильтр - пробка 1310 определяет значение e(t) усиленного сигнала при помощи полиномиального фильтра второго порядка следующим образом:
u(t) - значения выборок;
e(t)=u(t)-e(t) - усиленные значения выборок;
e(t) = u(t)+u(t-2)-α2e(t-2)-φ(t)θ(t) - шумовая компонента значений выборок;
φ(t) = -u(t-1)+αe(t-1).
Кроме того, адаптивный фильтр - пробка 1310 определяет градиент (Ψ(t)) следующим образом:
(Ψ(t) = φ(t)-α2Ψ(t-2)-αΨ(t-1)θ(t-1))
Наконец, адаптивный фильтр - пробка 1310 также производит оценку ошибки (n(t)) следующим образом:.
n(t) = u(t)+u(t-2)-α2e(t-2)-φ(t)θ(t-1)
Адаптивный фильтр - пробка 1310 направляет принятое по линии 1350 входное значение (u(t) или y(t)) выборок на схему задержки 1408. Значение входной выборки с однократной задержкой u(t-1) с выхода схемы задержки 1408 поступает по линии 1454 на схему задержки 1410, на выходной линии 1456 которой получают значение входной выборки с двухкратной задержкой u(t-2). Схемы задержки 1408 и 1410 задерживают поступающие на их соответствующие входы значения на один период синхросигнала, поступающего по линии CLK, как это упоминалось ранее. Схемы задержки 1426, 1428, 1440 и 1442 работают аналогично и задерживают поступающие на их соответствующие входы значения на один период синхросигнала, поступающего по линии CLK. Поступающий по линии 1364 параметр устранения смещения α подается на оба входа умножающего соединения 1412, на выходной линии 1468 которого получают произведение α2.
Поступающий по линии 1364 параметр устранения смещения α и поступающее по линии 1462 промежуточное значение e(t-l) (которое обсуждается ниже) подаются на входы умножающего соединения 1416, на выходной линии 1460 которого получают произведение αe(t-1). Квадрат параметра устранения смещения α2 по линии 1468 и промежуточное значение e(t-2) с двухкратной задержкой (которое обсуждается ниже) по линии 1464 подаются на входы умножающего соединения 1420, на выходной линии 1466 которого получают произведение α2e(t-2).
Значение входной выборки с однократной задержкой u(t-l) вычитается из поступающего по линии 1460 промежуточного значения αe(t-1) при помощи суммирующего соединения 1414, в результате чего на его выходной линии 1458 получают промежуточное значение φ(t) = -u(t-1)+αe(t-1). Поступающее по линии 1466 промежуточное значение α2e(t-2) вычитается из поступающего по линии 1456 значения входной выборки с двухкратной задержкой u(t-2) при помощи суммирующего соединения 1418, в результате чего на его выходной линии 1486 получают результирующее промежуточное значение u(t-2)-α2e(t-2). На входы умножающего соединения 1422 поступают: по линии 1458 промежуточное значение φ(t) и по линии 1362 коэффициент фильтра θ(t); на выходной линии 1472 умножающего соединения 1422 получают произведение φ(t)θ(t). На входы умножающего соединения 1424 поступают: по линии 1458 промежуточное значение φ(t) и по линии 1362 коэффициент фильтра θ(t-1); на выходной линии 1470 умножающего соединения 1424 получают произведение φ(t)θ(t-1).
Фильтр - пробка 1310 производит оценку шума у(е) в значении u(t) входной выборки за счет подачи значения u(t) входной выборки по линии 1350 и промежуточного значения u(t-2)-α2e(t-2) по линии 1486 на входы суммирующего соединения 1400 для получения суммы u(t)+u(t-2)-α2e(t-2) по линии 1450. Поступающие по линии 1472 промежуточное значение φ(t)θ(t) вычитается из поступающего по линии 1450 промежуточного значения u(t)+u(t-2)-α2e(t-2) при помощи суммирующего соединения 1404, в результате чего на его выходной линии 1452 получают оценку шума e(t) в значении входной выборки u(t). Оценка шума e(t) на линии 1452 вычитывается из значения входной выборки u(t) на линии 1350 при помощи суммирующего соединения 1406, в результате чего на выходной линии 260 фильтра - пробки получают результирующее усиленное значение сигнала e(t). Оценка шума e(t) по линии 1452 поступает на схему задержки 1426, на выходной линии 1462 которой получают оценку шума e(t-1) с однократной задержкой. Оценка шума e(t-1) с однократной задержкой по линии 1462 поступает на схему задержки 1428, на выходной линии 1464 которой получают оценку шума e(t-1) с двукратной задержкой. Указанные задержанные оценки шума на линиях 1462 и 1464 используются в промежуточных вычислениях, которые упоминались ранее.
В дополнение к усиленному сигналу e(t), вырабатываемому фильтром - пробкой 1310, находят априорную оценку шума n(t), которая используется в
вычислениях весовой адаптации, о чем идет речь ниже. Поступающее по линии 1470 промежуточное значение φ(t)θ(t-1) вычитается из поступающего по линии 1450 промежуточного значения u(t)+u(t-2)-α2e(t-2) при помощи суммирующего соединения 1402, в результате чего на линии 260 получают оценку ошибки n(t) в значении входной выборки u(t), которая используется в вычислениях весовой адаптации элементом 1312, о чем идет речь ниже.
Наконец, фильтр - пробка 1310 рекурсивно вычисляет градиент ψ(t), который используется в вычислениях весовой адаптации, о чем идет речь ниже. Текущее значение градиента ψ(t) поступает по линии 260 на схему задержки 1440, на выходной линии 1474 которой получают значение градиента ψ(t-1) с однократной задержкой. Значение градиента ψ(t-1) с однократной задержкой по линии 1474 поступает на схему задержки 1442, на выходной линии 1480 которой получают значение градиента ψ(t-2) с двухкратной задержкой. Значение градиента ψ(t-1) c однократной задержкой по линии 1474 и весовой коэффициент θ(t-1) по линии 1362 перемножаются при помощи умножающего соединения 1434, на выходной линии 1476 которого получают промежуточное произведение. Это промежуточное произведение по линии 1476 и параметр α устранения смещения по линии 1364 подаются на умножающее соединение 1432, на выходной линии 1478 которого получают промежуточное произведение αθ(t-1)ψ(t-1). Градиент ψ(t-2) с двухкратной задержкой по линии 1480 и квадрат α2 по линии 1468 подаются на умножающее соединение 1438. Произведение с выходной линии 1482 умножающего соединения 1438 вычитается из промежуточного значения φ(t) на линии 1458 при помощи суммирующего соединения 1436, в результате чего на линии 1484 получают промежуточное значение φ(t)-α2ψ(t-2). Промежуточное значение на линии 1478 вычитается из промежуточного значения на линии 1484 при помощи суммирующего соединения 1430, в результате чего на линии 260 получают новый градиент:
Ψ(t) = φ(t)-α2ψ(t-2)-αθ(t-1)ψ(t-1).
ВТОРОЙ ПРИМЕР - ВЕСОВАЯ АДАПТАЦИЯ
На фиг. 15 показаны дополнительные детали, касающиеся структуры построения и функционирования вычислительных элементов 1302 и 1312 весовой адаптации фиг. 13; эти элементы осуществляют одинаковые вычисления и на оба их входа подаются соответственно одинаковые значения из регистра 1306 фиг. 13 и из связанных с ними адаптивных фильтров - пробок 1308 и 1310. На вход вычислительного элемента 1302 весовой адаптации по линии 1358 от фильтра - пробки 1308 подается коэффициент ошибки n и градиент ψ, а по линии 1364 от регистра 1306 коэффициент забывания λ1. С выхода вычислительного элемента 1302 весовой адаптации по линии 1360 на фильтры - пробки 1300 и 1308 поступает текущее значение θ(t). Весовой коэффициент θ(t-1) с однократной задержкой поступает на фильтр - пробку 1308 по линии 1360. На вход вычислительного элемента 1312 весовой адаптации по линии 260 от фильтра - пробки 1310 левого канала подается оценка шума n и градиент ψ, а по линии 1364 от регистра 1306 коэффициент забывания λ2. С выхода вычислительного элемента 1312 весовой адаптации по линии 1362 на фильтры - пробки 1310 поступает текущее значение весового коэффициента θ(t) и весового коэффициента θ(t-1) с однократной задержкой, а также текущее значение θ(t) на элемент вычисления частоты 1304. Так как оба вычислительных элемента 1302 и 1312 весовой адаптации работают одинаково, то далее описывается работа только элемента 1302.
Вычислительный элемент 1302 весовой адаптации производит определение следующего весового коэффициента для связанных с ним фильтров - пробок, используя скалярные арифметические действия следующим образом (где переменная (t), использованная в приведенных ниже выражениях, указывает значение переменной, соответствующей периоду выборки "t"):
θ(t) = θ(t-1)+P(t)ψ(t)n(t) - обновленный весовой коэффициент; - переменная ковариантности.
- переменная ковариантности.
Вычислительный элемент 1302 весовой адаптации производит определение обновленного весового коэффициента θ(t) и выдает его по линии 1360 (как это обсуждается ниже), а также подает его на вход схемы задержки 1500 для получения по линии 1360 весового коэффициента θ(t-1) с однократной задержкой.
Вычислительный элемент 1302 весовой адаптации производит определение обновленной переменной ковариантности P(t) для каждого нового значения выборки как функции ранее вычисленной переменной ковариантности по линии 1556, градиента ψ по линии 1358 и коэффициента забывания λ1 по линии 1364 от регистра 1306. По линии 1554 на схему задержки 1508 поступает текущая переменная ковариантности P(t), а на ее выходной линии 1556 получают переменную ковариантности P(t-1) с однократной задержкой. На входы умножающего соединения 1512 поступают: по линии 1556 переменная ковариантности с однократной задержкой P(t-1), а по линии 1358 градиент ψ(t); на ее выходной линии 1558 получают произведение P(t-1)ψ(t). На входы умножающего соединения 1514 поступают: по линии 1558 произведение P(t-1)ψ(t), а по линии 1358 градиент ψ(t); на его выходной линии 1560 получают произведение P(t-1)ψ(t)2. На входы умножающего соединения 1516 поступают: по линии 1560 произведение P(t-1)ψ(t)2, а по линии 1556 переменная ковариантности с однократной задержкой P(t-1); на его выходной линии 1562 получают произведение P(t-1)ψ(t)2P(t-1) (числитель приведенного далее вычисления переменной ковариантности). На входы суммирующего соединения 1510 поступают: по линии 1560 произведение P(t-1)ψ(t)2, а по линии 1364 коэффициент забывания λ1; на его выходной линии 1568 получают сумму λ1+P(t-1)ψ(t)2 (знаменатель приведенного далее вычисления переменной ковариантности). Вычислительный элемент 1518 делит числитель, поступающий по его входной линии 1562, на знаменатель, поступающий по его входной линии 1568, при этом на его выходной линии 1564 получают частное. Это частное по линии 1564 подается на суммирующее соединение 1520 и вычитается из переменной ковариантности с однократной задержкой P(t-1), поступающей по линии 1556; результат получают на выходной линии 1566. Вычислительный элемент 1522 делит числитель, поступающий по его входной линии 1566, на знаменатель (коэффициент забывания λ1), поступающий по его входной линии 1364; в результате на выходной линии 1554 получают обновленную переменную ковариантности P(t).
На входы умножающего соединения 1502 поступают: по линии 1358 коэффициент ошибки n, а по линии 1358 градиент ψ; на его выходной линии 1550 получают произведение ψn. На входы умножающего соединения 1504 поступают: по линии 1550 произведение ψn, а по линии 1554 обновленная переменная ковариантности P(t); на его выходной линии 1552 получают произведение  Затем это произведение подается на суммирующее соединение 1506 по линии 1552, а по линии 1360 на суммирующее соединение 1506 поступает весовой коэффициент θ(t-1) с однократной задержкой; на его выходной линии 1360 получают обновленный весовой коэффициент θ(t).
Затем это произведение подается на суммирующее соединение 1506 по линии 1552, а по линии 1360 на суммирующее соединение 1506 поступает весовой коэффициент θ(t-1) с однократной задержкой; на его выходной линии 1360 получают обновленный весовой коэффициент θ(t).
ВТОРОЙ ПРИМЕР ОСУЩЕСТВЛЕНИЯ - ВЫЧИСЛЕНИЕ ЧАСТОТЫ
В дополнение к адаптивным фильтрам - пробкам 1310, на элемент вычисления частоты 1304 по линии 1362 поступает обновленный весовой коэффициент θ(t) от вычислительного элемента весовой адаптации 1312. Элемент вычисления частоты 1304, который показан более подробно на фиг. 16, производит накопление принятых по линии 1362 значений весовых коэффициентов θ(t) для вычисления весов фильтра Гертцеля В' (В'0 и В'1) и частоты Ω′, и выдает их по линии 358. Элемент вычисления частоты 1304 фиг. 16 работает аналогично элементу 308 фиг. 9 первого примера осуществления, который подробно обсуждался выше. На входы суммирующего соединения 1600 поступает соответственно по линии 1652 ранее накопленная сумма и по линии 1362 обновленный вес θ(t); полученная выходная сумма по линии 1654 подается на вход мультиплексора 1602. Мультиплексор 1602 нормально выбран для передачи накопленной суммы с его входной линии 1654 на выходную линию 1650. Накопленная сумма по линии 1650 подается на вход регистра 1604 и запоминается в регистре при поступлении синхроимпульса CLK для каждого нового значения веса, поступающего по линии 1362. При подаче на мультиплексор 1602 сигнала половины окна (что обсуждалось ранее при описании первого варианта со ссылкой на фиг. 3 - 12) по линии 274 производится сброс накопления при поступлении по входной линии вновь принятого значения веса, которое проходит через мультиплексор 1602 на выходную линию 1650. Это приводит к сбросу накопления в регистре 1604 и началу нового накопления для следующего периода половины окна значений выборок.
Сумма весов, принятых по линии 1362, по линии 1652 поступает на вход X вычислительного элемента 1606. Вычислительный элемент 1606 производит вычисление действительной части весов фильтра Гертцеля (В'0) в виде:
В'0 = -X/2N,
где X представляет собой входной сигнал элемента 1606, a N представляет собой число выборок в течение периода половины окна. Действительная часть весов фильтра Гертцеля (В'0) с выхода вычислительного элемента 1606 подается по линии 358 для использования волноводом 310 коэффициента половины окна, который обсуждался ранее. Действительная часть весов фильтра Гертцеля подается также на вход X вычислительного элемента 1608, который производит вычисление мнимой части весов фильтра Гертцеля (В'1) в виде:
В'1 = sqrt(1 - X2),
где X представляет собой входной сигнал элемента 1608. Мнимая часть весов фильтра Гертцеля (В'1) с выхода вычислительного элемента 1608 подается по линии 358 для использования волноводом 310 коэффициента половины окна, который обсуждался ранее. Действительная часть весов фильтра Гертцеля подается также на вход X вычислительного элемента 1610, который производит вычисление основной частоты (Ω′) вибрирующих расходных трубок в виде:
Ω′ = cos-1X,
где X представляет собой входной сигнал элемента 1610. Основная частота (Ω′) с выхода вычислительного элемента 1610 подается по линии 358 для использования волноводом 310 коэффициента половины окна, который обсуждался ранее.
Следует иметь в виду, что осуществленные вычислительными элементами 1606, 1608 и 1610 вычисления являются неопределенными в том случае, когда их соответствующие входные сигналы находятся вне определенных заданных диапазонов. Выходные данные этих вычислений используются только на границах окон Ханнинга, когда гарантируется соответствие входных сигналов соответствующим вычислениям. По этой причине неопределенные вычисления, описанные при помощи схемы фиг. 16, не имеют практического смысла. Как это упоминалось ранее, показанные на фиг. 16 псевдо - контуры предназначены только для использования в качестве средства лучшего понимания способов в соответствии с настоящим изобретением и связанных с ними вычислений.
Для специалистов ясно, что эвристические проверки, аналогичные описанным ранее со ссылкой на первый вариант осуществления настоящего изобретения, могут быть применены и во втором варианте. Эти эвристические проверки позволяют предотвратить ошибочное измерение расхода в результате ошибочного вычисления, вызванного потерей сходимости частоты способов адаптации фильтров - пробок. Такие эвристические проверки обычно позволяют обновлять вычисления для каждой выборки (или на границах половины окна) только в том случае, когда новые значения находятся в разумных пределах для частного случая применения расходомера. Если в результате вычислений получают неожиданные величины, то обновленные значения не используются, а производится повторное применение предыдущих значений.
Несмотря на то, что был описан предпочтительный вариант осуществления изобретения, совершенно ясно, что в него специалистами в данной области могут быть внесены любые изменения и дополнения, которые не выходят однако за рамки приведенной далее формулы изобретения и соответствуют его духу. Например, несмотря на то, что настоящее изобретение было описано со ссылкой на показанный на фиг. 1 расходомер, следует иметь в виду, что настоящее изобретение не ограничивается применением только для такого типа расходомеров, который показан на фиг. 1. Оно может быть использовано с любым типом расходомеров, в которых используется принцип Кориолиса, в том числе таких, в которых применяются одиночные расходные трубки, сдвоенные расходные трубки, прямые расходные трубки и расходные трубки произвольной конфигурации. Кроме того, расходомер, который используется в соответствии с настоящим изобретением, не обязательно должен иметь определенную показанную на фиг. 1 конструкцию с фланцем и отверстием, а вместо этого может быть смонтирован на трубопроводе при помощи любого подходящего крепежного средства. Кроме того, например, описанные в настоящем изобретении адаптивные фильтры - пробки могут иметь значения выборок входного сигнала с другой формой прореживания или даже без прореживания, если это годится для определенных частот выборок и частного вида применения. Кроме того, вычисления весовой адаптации могут быть основаны не на квантованных значениях сигнала левого канала, а на других значениях сигнала. Специалисты легко поймут, что множество модификаций описанных здесь вариантов осуществления настоящего изобретения не выходит за рамки заявленного изобретения и соответствует его духу.
НАДПИСИ НА ФИГ. 17-19
Фиг. 17:
1700. Прерывание АЦП.
1702. Считывание квантованных выборок в кольцевом буфере.
1704. 8 новых выборок считано с момента последнего вычисления?
1706. Определение свертки выборок и запоминание во втором кольцевом буфере.
1708. 6 новых значений запомнены с момента последней свертки?
1710. Определение значений свертки во втором буфере и хранение в буфере выборок.
Фиг. 18:
1800. Инициализация кольцевых буферов для А/Ц прореживания и разрешение А/Ц прерывания.
1802. Ожидание наличия прореженной выборки.
1804. Использование фильтра - пробки для получения усиленной выборки.
1806. Обновление параметров фильтра.
1808. Обновление фильтра Гертцеля для накопления комплексного числа для фазы.
1810. Накопление значений сигнала и шума.
1812. Старт половины окна?
1814. Определение отношения сигнал/шум по значениям накопленного сигнала и шума.
1816. Нахождение ошибки SNR (отношения сигнал/шум).
1818. Сброс вычислений адаптации фильтров.
1820. Определение Δt для предыдущего окна, приложение средств пользователя и определение весов фильтра Гертцеля.
Фиг. 19:
1902. Определение обновленного коэффициента забывания.
1904. Определение коэффициента усиления.
1906. Определение обновленного параметра устранения смещения.
1908. Определение обновленной матрицы ковариантности.
1910. Определение обновленных весов фильтров - пробок.
1912. Обновленные веса устойчивы?
1914. Приложение обновленных весов к фильтрам - пробкам.
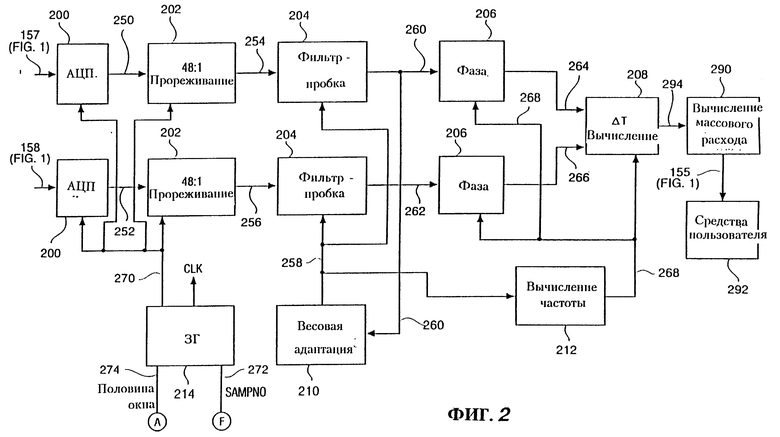
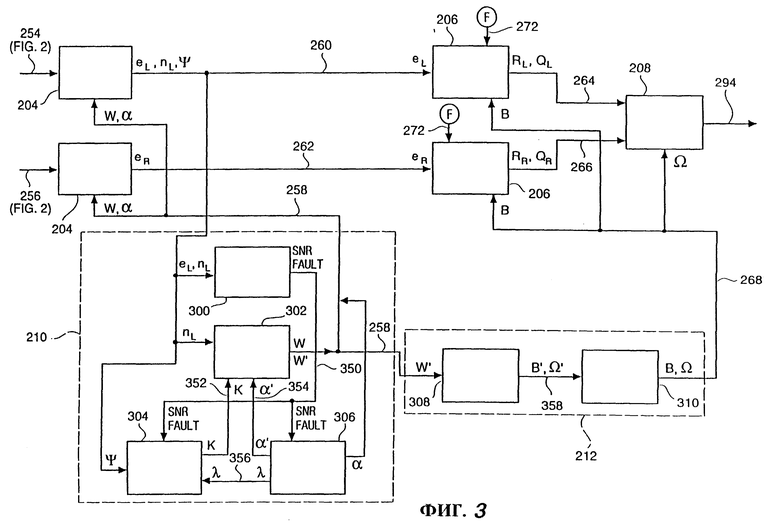
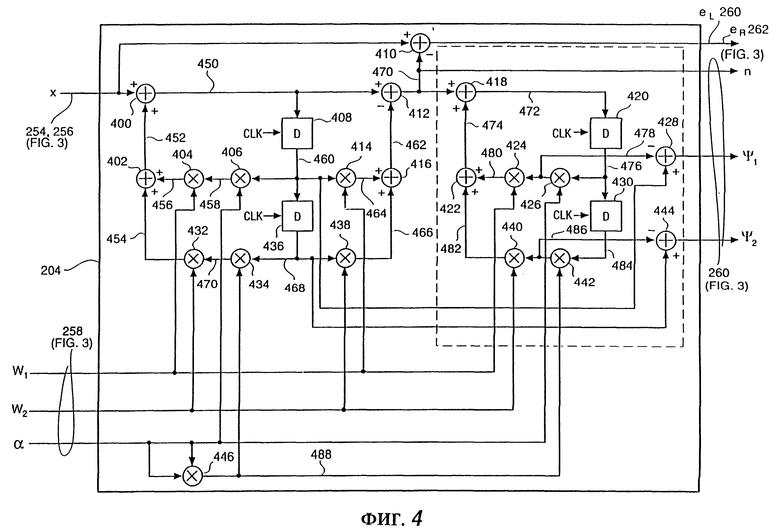
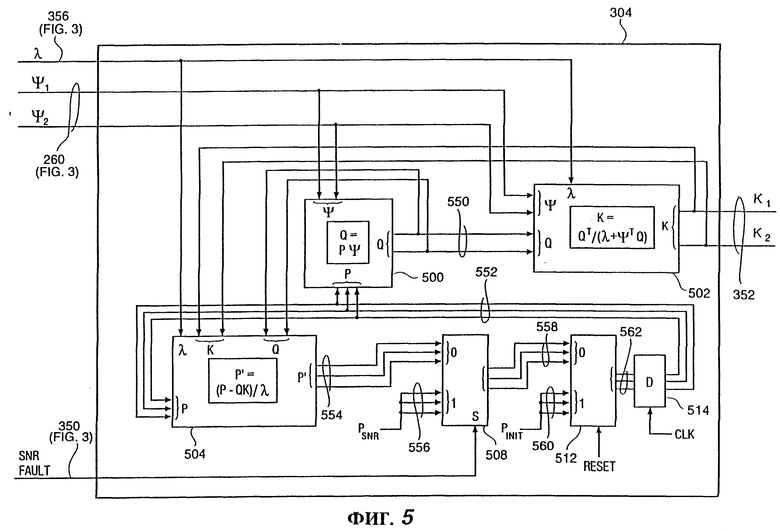

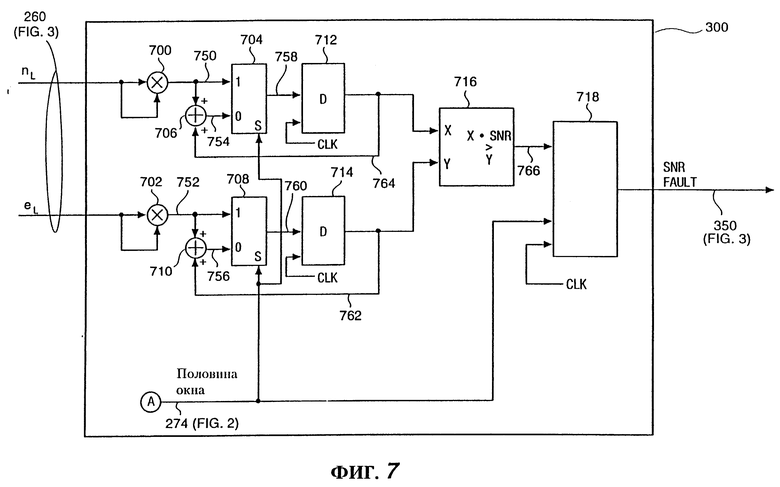
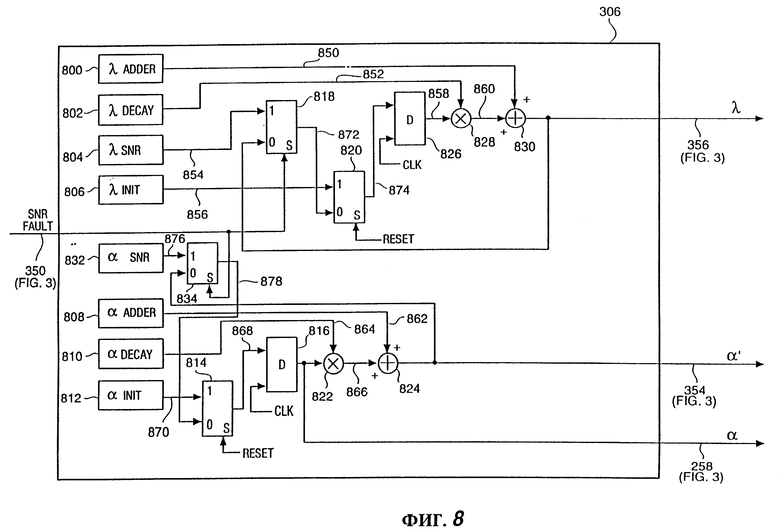
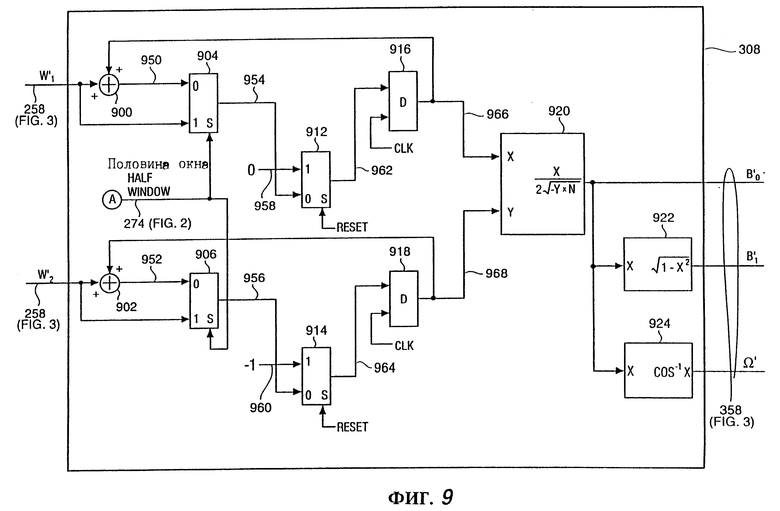
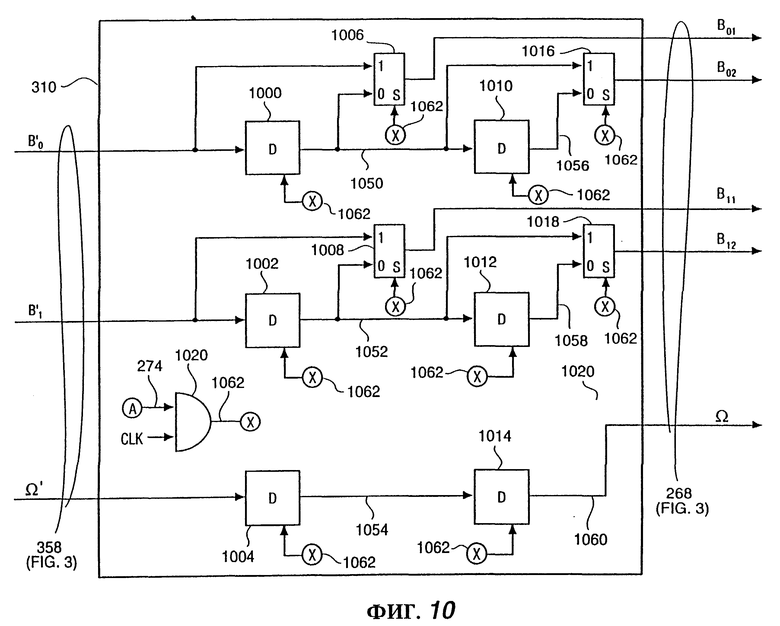
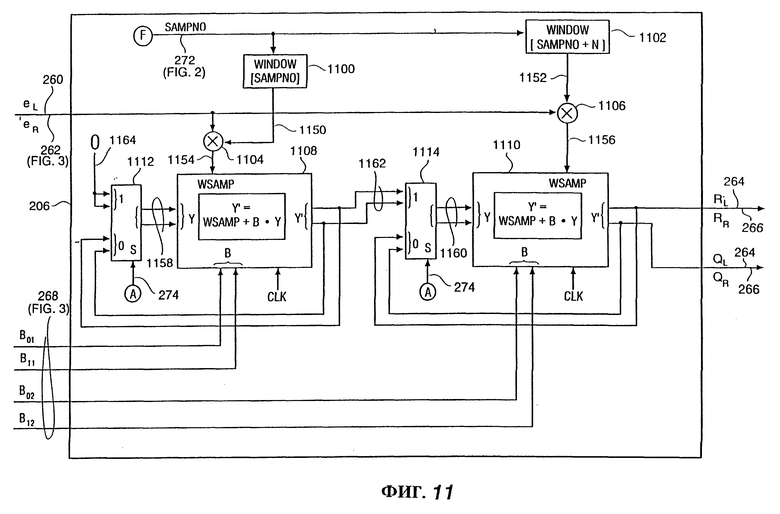
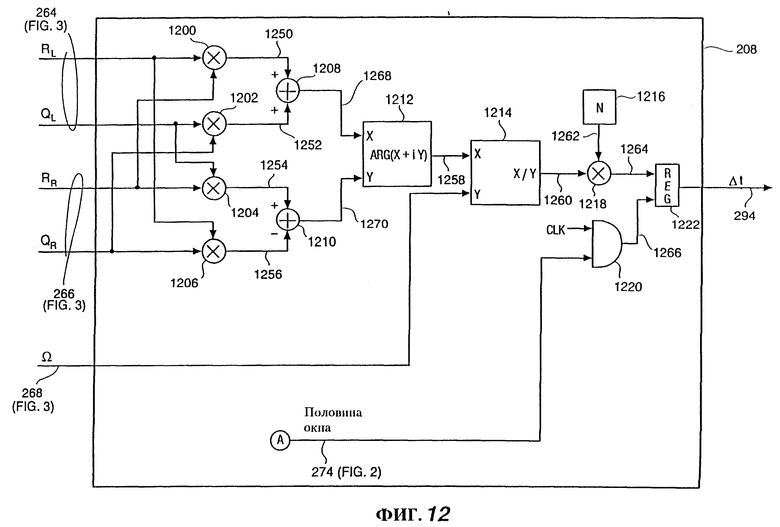
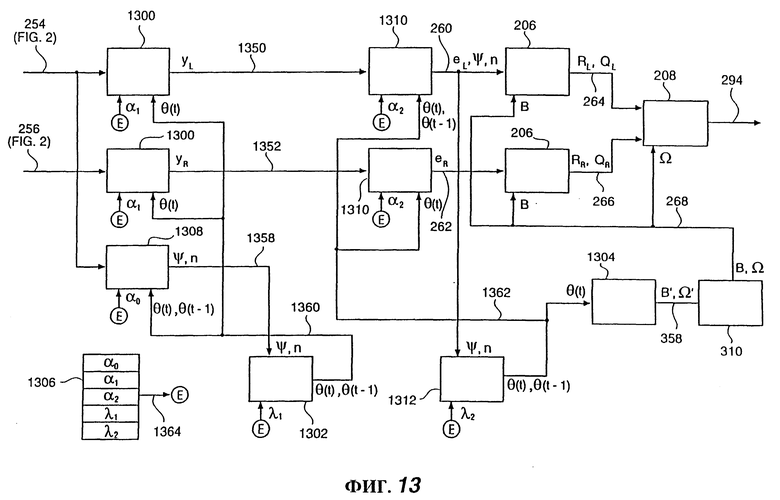
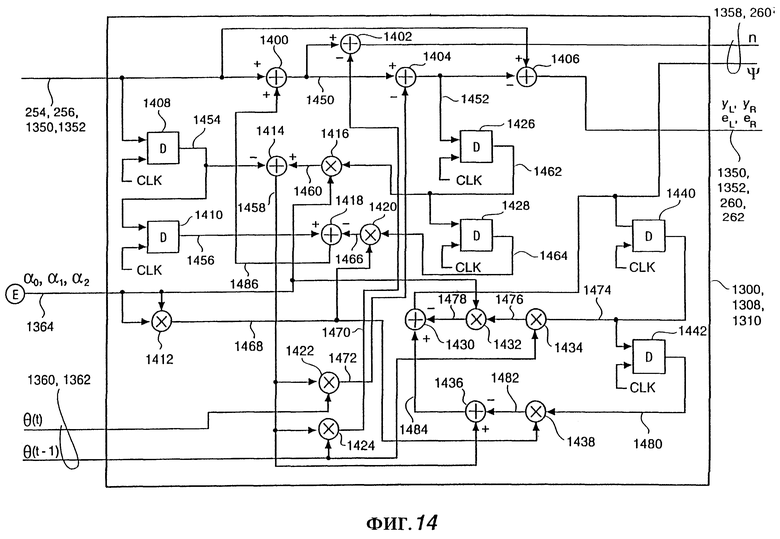
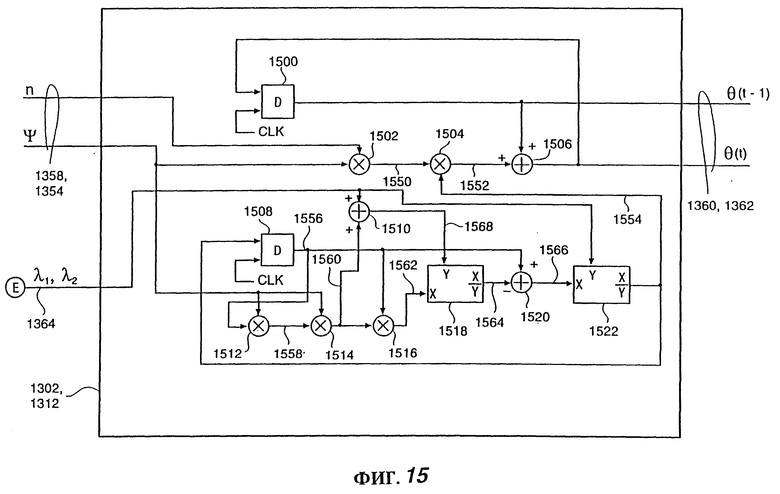
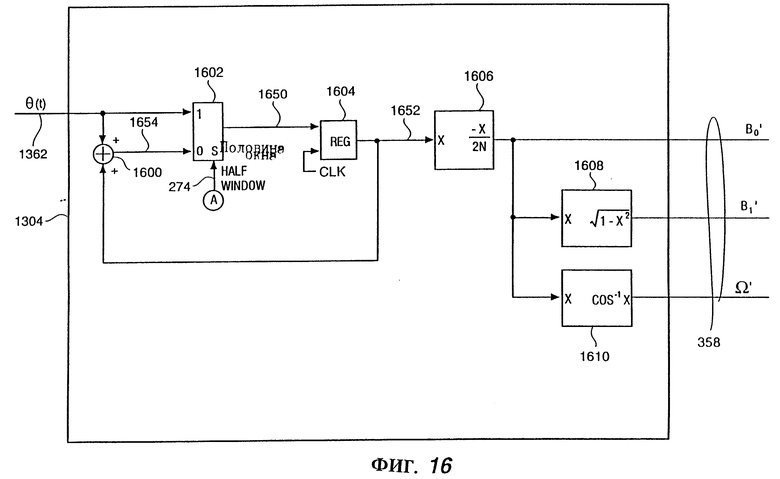
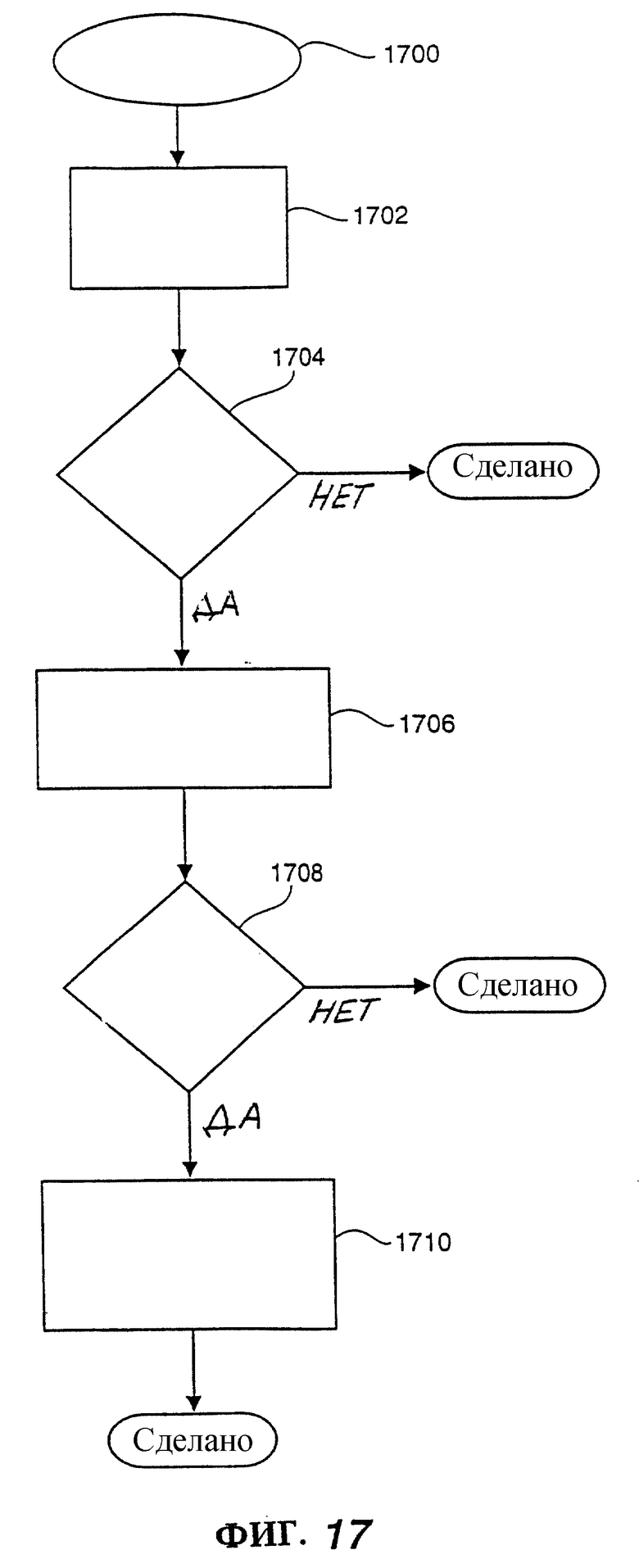
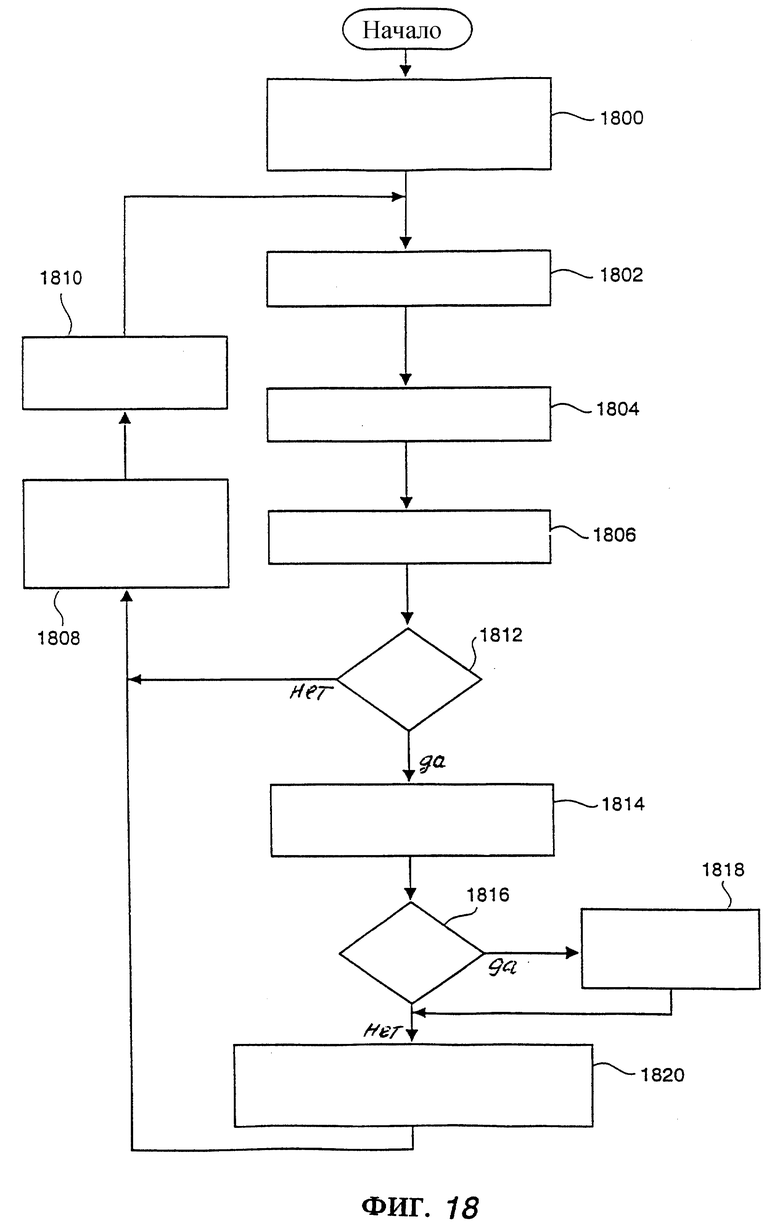
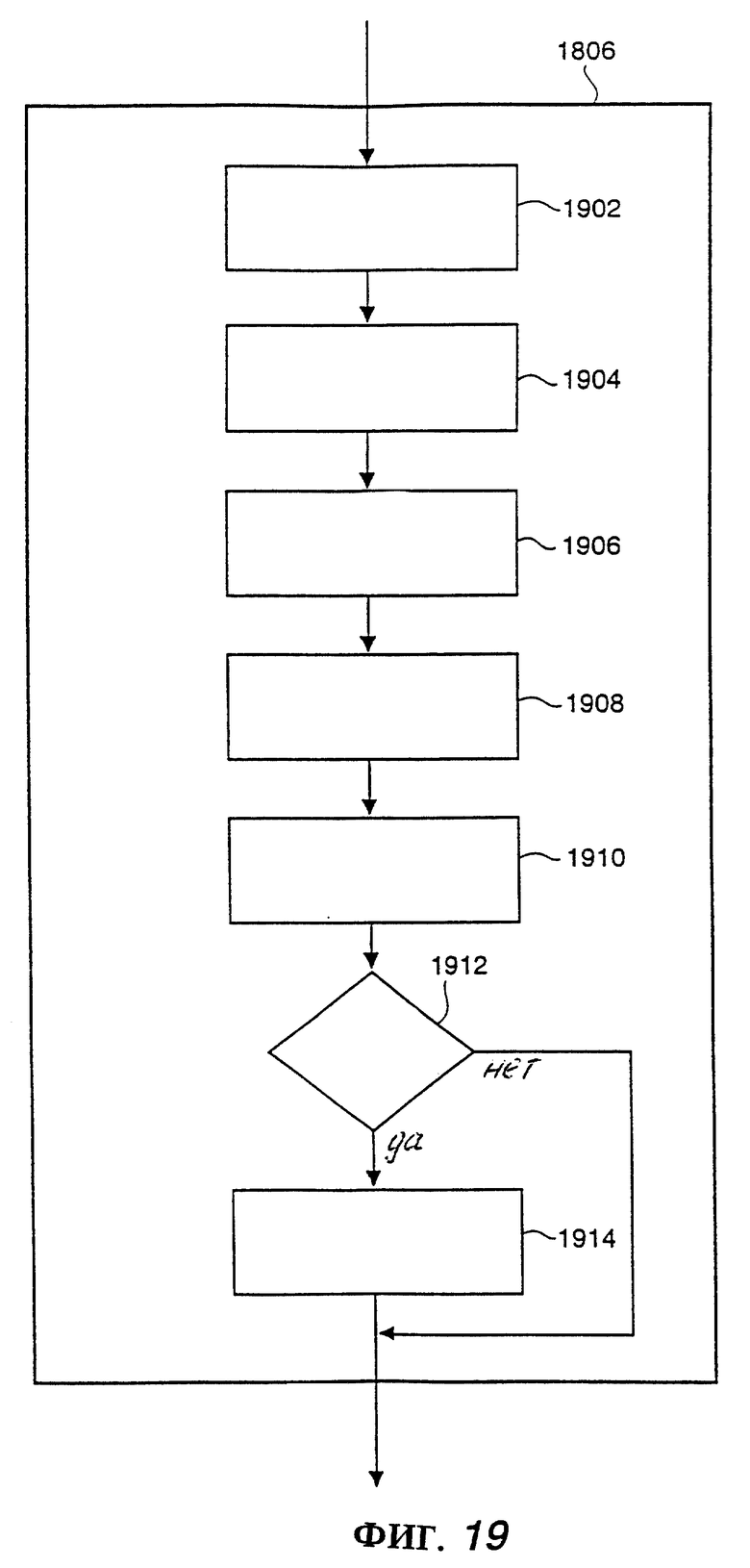
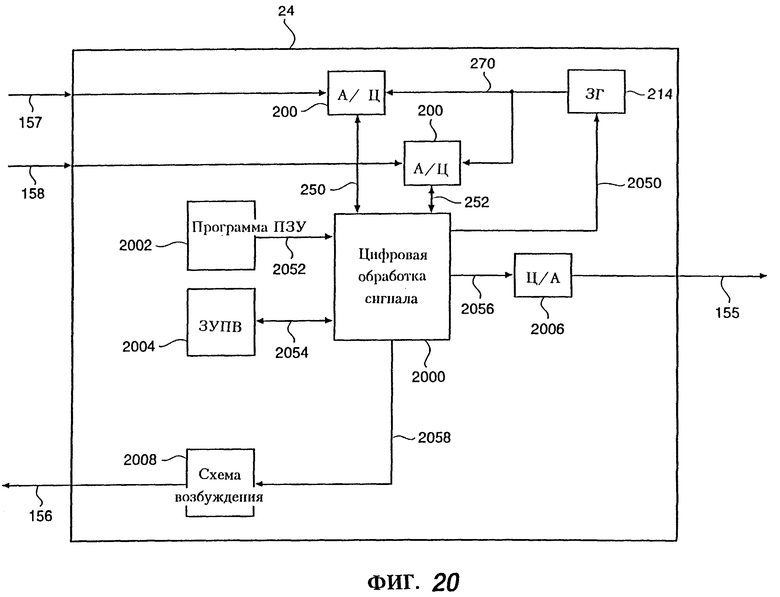
Сущность изобретения: при проведении измерений посредством АЦП осуществляют периодическую выборку аналоговых выходных сигналов датчиков, соединенных с вибрирующими расходными трубками. Последовательность дискретных квантованных значений, полученная для каждого датчика, усиливается соответствующим адаптивным цифровым фильтром - пробкой. В варианте выполнения для усиления сигнала используют множество адаптивных фильтров - пробок. Цифровые прореживающие фильтры, на которые поступают сигналы АЦП, служат для защиты от наложения спектров квантованных значений сигналов. Средство весовой адаптации измеряет параметры фильтров - пробок для обеспечения регулировки полосы задерживания с целью подавления нежелательных шумовых компонентов выходных сигналов датчиков. Значения сигнала с фильтров - пробок поступают на средство вычисления фазы сигнала каждого датчика. По разности фаз вычисляют временную задержку Δt, пропорциональную массовому расходу материала. Изобретения обеспечивают повышение точности измерения за счет эффективного подавления негармонического или широкополосного шума. 2 с. и 32 з.п. ф-лы, 20 ил.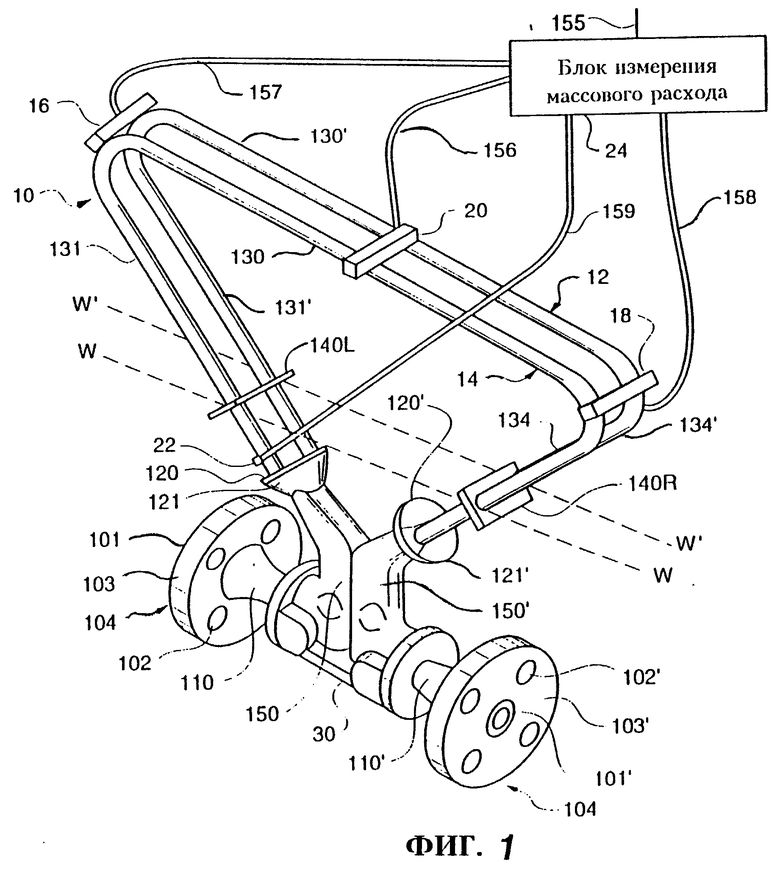
h(K) = (1/2)(1-cos(2πK/(2N-1))),
где N - половина числа дискретных усиленных значений в окне;
k - индекс значения, которому присвоен вес h (k).
h(K) = (1/2)(1-cos(2πK/(2N-1))),
где N - половина числа дискретных усиленных значений в окне;
k - индекс значения, которому присвоен вес h (k).
h(K) = (1/2)(1-cos(2πK/(2N-1))),
где N - половина числа дискретных усиленных значений в окне;
k - индекс значения, которому присвоен вес h(k).
h(K) = (1/2)(1-cos(2πK/(2N-1))),
где N - половина числа дискретных усиленных значений в окне;
k - индекс значения, которому присвоен вес h(k).
| US 4934196, 19.06.1990 | |||
| US 5429002 A, 04.07.1995 | |||
| Способ измерения массового расхода потока и устройство для его осуществления | 1987 |
|
SU1739204A1 |
